
Abstract
Reactive balance control following hand perturbations is important for everyday living as humans constantly encounter perturbations to the upper limb while performing functional tasks while standing. When multiple tasks are performed simultaneously, cognitive processing is increased, and performance on at least one of the tasks is often disrupted, owing to attentional resources being divided. The purpose here was to assess the effects of increased cognitive processing on whole-body balance responses to perturbations of the hand during continuous voluntary reaching. Sixteen participants (8 females; 22.9 ± 4.5 years) stood and grasped the handle of a KINARM – a robotic-controlled manipulandum paired with an augmented visual display. Participants completed 10 total trials of 100 mediolateral arm movements at a consistent speed of one reach per second, and an auditory n-back task (cognitive task). Twenty anteroposterior hand perturbations were interspersed randomly throughout the reaching trials. The arm movements with random arm perturbations were either performed simultaneously with the cognitive task (combined task) or in isolation (arm perturbation task). Peak centre of pressure (COP) displacement and velocity, time to COP displacement onset and peak, as well as hand displacement and velocity following the hand perturbation were evaluated. N-back response times were 8% slower and 11% less accurate for the combined than the cognitive task. Peak COP displacement following posterior perturbations increased by 8% during the combined compared to the arm perturbation task alone, with no other differences detected. Hand peak displacement decreased by 5% during the combined compared to the arm perturbation task. The main findings indicate that with increased cognitive processing, attentional resources were allocated from the cognitive task towards upper limb movements, while attentional resources for balance seemed unaltered.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Maintaining balance following an external perturbation is achieved through the integration of multiple sensory cues and subsequent compensatory motor output to prevent the body from falling over (Rasman et al. 2018). Although reactive balance control using whole-body perturbations has been well studied, humans constantly engage their upper limbs while standing to perform daily functional tasks. As such, the central nervous system must use strategies to integrate upright balance with the performance of upper limb movements, such as reaching or grasping (Massion 1998). Yet, little is known about how reactive balance control is prioritized when the hands are perturbed during a repetitive manual task. Further, it is common for humans to divide their attention, such as when engaging in a conversation, while performing upper limb functional tasks. Dual-task paradigms involving reactive postural responses to whole-body perturbations and a concurrent cognitive task involve increased cognitive processing, or divided attention, and often result in decreased performance of one or both tasks (Lajoie et al. 1993; Shumway-Cook and Woollacott 2000; Pellecchia 2003). However, it is unclear whether increased cognitive processing influences whole-body postural responses to perturbations of a single upper limb while standing.
External perturbations applied to the body require subsequent compensatory adjustments from the postural muscles of the trunk and lower limbs to keep the body upright (Horak and Nashner 1986). Reactive balance control following whole-body perturbations, through the use of surface translations and rotations, has been studied thoroughly (Nashner 1976; Horak and Nashner 1986; Horak et al. 1990; Dietz et al. 1984; Allum et al. 2001, 2002; Lin and Woollacott 2002; Adkin et al. 2006). Lowrey et al. (2017) demonstrated that mechanical perturbations applied directly to the hand during a goal-directed reaching task evoked muscular responses in the lower limb and hence, responses in centre of pressure (COP) to maintain upright equilibrium. Further, whole-body reactive postural adjustments are modified based on the context or goal of the upper-limb task (e.g., reaching towards the centre of a small circle compared to a larger rectangle). When performing a ballistic, goal-directed reaching task, the central nervous system often anticipates the disturbance to posture by enacting an anticipatory postural adjustment (Kennefick et al. 2018; Dierijck et al. 2020). Further, such adjustments can influence compensatory or reactive postural responses (Santos et al. 2010a, b). In the current study, we attempted to limit anticipatory postural adjustments in the anteroposterior direction by having participants generate continuous, alternating, mediolateral repeated arm movements that were orthogonal to the applied perturbation force. In doing so, we intended to reduce anteroposterior anticipatory postural adjustments and thus, limit the disruption to whole-body reactive balance responses compared to a ballistic, point-to-point reaching task used previously (Trivedi et al. 2010; Lowrey et al. 2017; Dierijck et al. 2020).
When performing multiple tasks simultaneously, attentional resources are divided and the performance of one or more tasks is decreased (Kahneman 1973; Wickens 1983). Typically, dual-task paradigms involving standing balance and a cognitive task result in decreased cognitive task performance (Maki and McIlroy 2007), but the effects on balance control are equivocal (Andersson et al. 1998; Stroffregen et al. 1999, 2000; Norrie et al. 2002; Redfern et al. 2002; Woollacott and Shumway-Cook 2002; Swan et al. 2004; Huxhold et al. 2006). Interference of postural control is often demonstrated by increased sway (Andersson et al. 1998) or larger reactive balance responses (e.g., increased COP peak displacement and electromyography magnitudes; Quant et al. 2004; Little and Woollacott. 2014, 2015), and likely reflect competition for attentional resources between the cognitive and postural tasks (Little and Woollacott 2015). Facilitation of postural control, as demonstrated by an attenuation in COP parameters (e.g., decreased average and peak COP displacement; Stroffregen et al. 1999, 2000; Swan et al. 2004; Huxhold et al. 2006), may occur as a result of using a cognitive task to shift attentional resources away from the processes required for balance control, enabling the postural system to self-organize automatically (Wulf et al. 2001; Huxhold et al. 2006). In studies where the addition of a cognitive task did not alter postural responses (Norrie et al. 2002; Redfern et al. 2002), it is possible that increased cognitive processing had only a minimal effect on balance control, or attentional resources were diverted away from the cognitive to the postural task to prioritize the maintenance of upright balance (Little and Woollacott 2015).
Indeed, the addition of a secondary task can reduce the performance of reactive balance control as well as cognitive function (Quant et al. 2004; Little and Woollacott 2014, 2015). Working memory tasks are often used during dual-task paradigms to investigate alterations in cognitive demand on balance control, as these cognitive tasks require both online information storage and processing (Huxhold et al. 2006; Woollacott and Vander Velde 2008). Introduced by Kirchner (1958), the n-back task demands rule-governed as opposed to familiarity-based decisions (Monk et al. 2011). By requiring participants to actively store, process, and respond to a sequence of consecutive stimuli, the n-back task is designed to induce a continuous parametrically variable load upon working memory (Braver et al. 1997). In addition, the present study implemented an auditory instead of a visual n-back task to remove the potential bottleneck in visual processing when performing the requisite reaching movements in the presence of divided attention. Therefore, the auditory n-back task can serve as an effective method in dividing attention and exploring the effects of increased cognitive processing on reactive postural control.
The overall purpose of our study was to examine the influence of increased cognitive processing on reactive whole-body balance responses to perturbations of the upper limb during a repetitive voluntary reaching task. It was hypothesized that with increased cognitive processing (i.e., a cognitive task paired with cyclical, mediolateral reaching while standing), cognitive performance would be reduced and reactive balance adjustments of the hand and COP following arm perturbations would be slower and demonstrate larger peak displacements.
Methods
Participants
Sixteen participants completed the experiment (eight females; age: 22.9 ± 4.5 years, mass: 75.6 ± 9.7 kg, height: 173.9 ± 7.8 cm). All participants were self-declared right-handed with normal hearing and vision or corrected-to-normal vision, with no known history of cardiovascular, neurological, musculoskeletal, or balance impairments, or use of medications with side effects of dizziness, lack of motor control, or slowed reaction time. Participants provided written and oral informed consent prior to participation. The study procedures were approved by the University of British Columbia’s Clinical Research Ethics Board (CREB Approval: H19-01982).
Experimental equipment
Data were collected using the KINARM End-Point robot (BKIN Technologies Ltd., Kingston, Canada) and a True Impulse force plate (NDI, Waterloo, ON). The KINARM is a graspable manipulandum paired with a 2D augmented reality display. The KINARM software and data acquisition board sampled displacement and acceleration at each robotic joint angle, as well as force and torque in six degrees of freedom. The KINARM software and data acquisition board also collected forces and moments in the X (mediolateral), Y (anteroposterior), and Z (vertical) axes through the force plate. Data were sampled at 1000 Hz and stored offline for analysis.
Experimental design
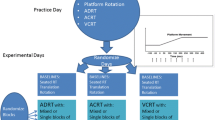
The study took place during a single session in a dimly lit room. The study involved three conditions: arm perturbation task, cognitive task, and combined task. The arm perturbation task involved the performance of continuous, alternating, mediolateral reaches while receiving random anteroposterior, mechanical perturbations to the hand. The cognitive task required participants to perform the n-back task in isolation, whereas the combined task incorporated the performance of both tasks simultaneously. For all three tasks, participants stood facing the KINARM. The tasks were centered in front of the right arm and participants held the right handle linked to the robotic motors with their right hand and their elbow flexed at an ~ 90° angle (Fig. 1A). Their feet were positioned together on the force plate so the medial malleoli were touching. The cognitive task in isolation always preceded the block of five combined task trials. The combined task block and arm perturbation block order were pseudo-randomized and counterbalanced.

Experimental setup and KINARM display with hand movements. Experimental setup of a participant standing and holding the handle of the KINARM (A). KINARM display screen presenting two targets (circles) and performance of voluntary reaching to the right (B) and left (C) with anterior and posterior perturbations as well as when reaching in both directions with no perturbations (D). Black arrows represent rightward (lateral) reaches, and grey arrows represent leftward (medial) reaches. Upward deflections in B and C represent anterior perturbations, whereas downward deflections in B and C depict posterior perturbations
Arm perturbation task
Participants began with familiarization consisting of 40 continuous alternating mediolateral reaching movements (20 leftward; 20 rightward) including eight randomly, interspersed anteroposterior hand perturbations (four anterior; four posterior). For the arm perturbation task, participants performed a block of five, ~ 100-s trials. Each trial consisted of 100 continuous mediolateral reaching movements (50 leftward; 50 rightward) with 20 randomly interspersed anteroposterior perturbations (10 anterior, 10 posterior), for a total of 500 reaches and 100 perturbations per participant (Fig. 1B–D). Voluntary reaches were performed in the horizontal plane between two adjacent green circular targets of the same size (visual radius: 2 cm) presented 30 cm apart on the display screen. A metronome set to 60 beats per minute was used to help the participant pace the arm movements. When it occurred, the perturbation was applied as soon as the participant’s hand left a target and consisted of a 25 ms ramp, with an external 60 N peak force applied for a duration of 40 ms, and a 25 ms ramp down (90-ms total; Dierijck et al. 2020). To ensure an adequate postural response, the anterior and posterior forces applied at the handle for this study were set at a peak force of 60 N, which is greater than previous KINARM studies focusing on balance control and arm perturbations (9 N: Lowrey et al. 2017; 30 N: Dierijck et al. 2020). Prior to the familiarization trial, participants were advised that they would receive random perturbations from the manipulandum, but were instructed to perform a continuous hand movement between the two targets, and avoid pausing at each target when changing hand direction. An experimenter provided verbal instructions throughout the trials to ensure participants were keeping a consistent pace with the metronome, so as to move rightwards to the target for 1-s and leftwards for 1-s. However, the speed and accuracy of the reaching task were not stressed.
Cognitive task
A working memory task was used in the form of an auditory n-back task (N-backer; Monk et al. 2011). The participant wore a headset with built-in headphones and a microphone (Logitech H390 USB Headset, Switzerland). The headset was worn throughout the entire experiment, and was connected to a laptop with speech recognition software that presented the task (Monk et al. 2011). A sequence of numbers between 1 and 9 was presented through the headset in random order, with a pseudo-random interstimulus interval of ~ 1500 ms (range 1200–1800 ms), and the participant verbally stated the number presented n steps prior. Based on pilot testing, the size of n for the current study was adjusted to 1 as this size was able to sufficiently alter cognitive performance during the combined task (Fig. 2). Speech recognition software was used to record the timing of when the number was presented from the computer (“Speak time”) and when the participant stated the number (“Receive time”). The software also recorded the number presented by the computer (“Spoken”) and the number spoken by the participant (“Received”). Time boundaries (range 1200–3300 ms) were set to determine whether the participant was able to respond between the two numbers in the sequence following each presented number. The participant’s response was deemed correct if it matched the number presented from the computer 1 step prior, and if answered within the time boundaries.

Auditory n-back task protocol. The speech recognition software on the computer presented a consecutive sequence of numbers (black font), to which the participant would repeat the number presented 1-step prior (blue font). Each number from the computer was presented with an interstimulus interval of ~ 1500 ms (range 1200–1800 ms). Participants were required to respond to each number between the time boundaries of 1200–3300 ms to ensure the response was given between the two numbers in the sequence following each presented number
During the experiment, participants first familiarized themselves with the n-back task by practicing until they felt comfortable with the protocol. To determine whether cognitive processing would be altered by the combined task paradigm, participants completed one 120-s trial of the cognitive task in isolation as a baseline measure. The KINARM display screen presented a green circular target (visual radius: 2 cm). The participants held their hand in the centre of the target throughout the entire trial, and performed the cognitive task as accurately as possible while standing quietly. For consistency across conditions, the metronome set to 60 beats per minute was used but participants were instructed to ignore it.
Combined task
Participants performed a similar familiarization trial as the arm perturbation task prior to the experimental trials, but the combined task included the reaches paired with the cognitive task. The combined task combined the performance of the arm perturbation and cognitive task simultaneously. Participants completed the same number of trials as outlined in the arm perturbation task. Participants were instructed to focus equally on both the cognitive and continuous reaching task.
Data analysis
All COP and hand kinematic data analyses were performed offline with MATLAB software (The MathWorks, Inc., Natick, MA, USA). All COP signals were processed using a fourth-order, dual-pass digital Butterworth filter with a 5 Hz cut-off frequency (Kennefick et al. 2018; Dierijck et al. 2020). Postural responses were assessed by calculating the anteroposterior peak COP displacement and velocity following the hand perturbation onset. For both COP displacement and velocity, maximum values were examined for anterior perturbations, while minimum values were used for posterior perturbations. In addition, the onset of COP displacement was measured by taking the time point at which the COP displacement surpassed 3 standard deviations from the baseline value, defined as the mean COP displacement 300 ms prior to the hand perturbation onset (Fig. 3). Time to COP displacement onset was calculated by subtracting onset of hand perturbation from time of COP displacement onset. Time to peak COP displacement was calculated by subtracting the onset of hand perturbation from the time of peak COP displacement. Hand kinematics were assessed by calculating anteroposterior peak hand displacement and velocity following the hand perturbation. Maximum values were examined for perturbations in the anterior direction, while minimum values were used for perturbations in the posterior direction. Owing to technical limitations, some files from the data collected were excluded, and, therefore, were not included in the statistical analyses. In particular, two combined task trials (40 perturbations) from one participant (leaving 60 perturbations for analysis), and one combined task trial (20 perturbations) each from two other participants (leaving 80 perturbations per participant for analysis) were excluded.

Evaluation protocol of hand kinematic and COP parameters using representative data from one participant. Hand perturbation onset (A; black unfilled circle) occurred once the hand left the target. Displacement onset of COP (grey unfilled circle) was taken when COP displacement surpassed 3 standard deviations from the Baseline value, defined as the mean COP displacement 300 ms prior to the hand perturbation onset. Peak hand displacement is represented by a black filled circle, and peak COP displacement is represented by a grey filled circle
For the cognitive task, response times were calculated by subtracting “Speak time” from “Receive time”. The time between the points at which the participant began to vocalise the answer and at which voice recognition from the software was complete, termed the recognition delay, of 850 ms was subtracted from the calculations (Monk et al. 2011). Performance of the cognitive task was also assessed by calculating the percentage of correct responses per trial. Individual participant data were averaged across the five combined task trials.
Statistical analysis
All statistical analyses were conducted using SPSS version 23 (SPSS Inc., Chicago, IL, USA). Individual participant data for each dependent variable were averaged across all trials within each condition and deemed to be normally distributed, following the administration of the Jarque–Bera test. The COP and hand kinematic data were analyzed using a 2 (arm perturbation vs combined task) × 2 (anterior vs posterior hand perturbations) repeated-measures analysis of variance (ANOVA). Effect sizes were evaluated using the partial-eta squared (ηp2) metric. Post-hoc analyses were performed using Bonferroni-corrected paired-samples t tests where appropriate, with effect sizes reported using Cohen’s d. The cognitive task data were analyzed using paired t-tests to compare the cognitive task only values to the cognitive task values performed during the combined task trials. Effect sizes were reported using Cohen’s d. A p value of < 0.05 was considered significant. Values are reported as mean ± standard deviation.
Results
Cognitive performance
Response times to the n-back task were 8% slower during the combined task condition than when performing the cognitive task only (t(15) = − 6.711, p < 0.001, d = 1.678). The percentage of correct responses was reduced by 11% during the combined task than when performing the cognitive task alone (t(15) = 4.877, p < 0.001, d = 1.219) (Fig. 4).

Response times (A) and percentage of correct responses (B) of the cognitive task and combined task. Squares represent mean values (whiskers represent ± standard deviation), while dots represent individual data. Cognitive task-only values are represented by unfilled shapes, while the combined task values are represented by filled shapes. Differences (p < 0.05) between cognitive task and combined task conditions are indicated by an asterisk (*). Grey lines link individual data points between cognitive only and combined tasks
Center of pressure
For anteroposterior peak COP displacement, there was an interaction (F(1,15) = 6.508, p = 0.022, ηp2 = 0.303) and a main effect for perturbation direction (F(1,15) = 7.042, p = 0.018, ηp2 = 0.319). However, there was no main effect for task (F(1,15) = 2.781, p = 0.116, ηp2 = 0.156). Post hoc analysis revealed that peak COP displacement for the combined task was 8% greater than the arm perturbation task following posterior perturbations (t(15) = − 2.257, p = 0.039, d = 0.564), while there were no detectable differences between tasks following anterior directed perturbations (t(15) = 0.211, p = 0.836, d = 0.053). Peak COP displacement following perturbations directed posteriorly was 14% greater than anterior perturbations for the combined task (t(15) = − 3.505, p = 0.003, d = 0.876). However, there were no detectable differences between anterior and posterior perturbation direction for the arm perturbation task (t(15) = − 1.191, p = 0.252, d = 0.298)(Fig. 5A). Additionally, the direction of the COP response was always aligned with the direction of the arm perturbation.

Peak anteroposterior displacement of COP (A), peak anteroposterior velocity of COP (B), time to COP displacement onset (C), and time to COP peak displacement (D). Squares represent mean values (whiskers represent ± standard deviation), while dots represent individual data. Arm perturbation task values are represented by unfilled shapes, while combined task values are represented by filled shapes. Differences (p < 0.05) between arm perturbation and combined task conditions are indicated by an asterisk (*). Post hoc differences (Panels A and B: p < 0.05) and perturbation direction main effects (Panels C and D; p < 0.05) between anterior and posterior perturbation directions are indicated by a dagger (†). Grey lines link individual data points between arm perturbation and combined tasks
Anteroposterior peak COP velocity exhibited an interaction (F(1,15) = 5.436, p = 0.034, ηp2 = 0.266) and a main effect for direction of the perturbation (F(1,15) = 27.286, p < 0.001, ηp2 = 0.645), but there was no main effect for task (F(1,15) = 0.084, p = 0.776, ηp2 = 0.006). Post hoc analysis revealed that peak COP velocity following anterior perturbations was 27 and 20% faster than posterior perturbations during the arm perturbation (t(15) = 5.993, p < 0.001, d = 1.498) and combined tasks (t(15) = 3.953, p = 0.001, d = 0.988), respectively. There were no detectable differences between tasks when the perturbation was directed anteriorly (t(15) = 1.337, p = 0.201, d = 0.334) or posteriorly (t(15) = − 0.840, p = 0.414, d = 0.210)(Fig. 5B).
For time to COP displacement onset, there was no interaction (F(1,15) = 0.730, p = 0.406, ηp2 = 0.046) or task effect (F(1,15) < 0.001, p = 0.989, ηp2 < 0.001). However, there was a main effect for perturbation direction (F(1,15) = 48.854, p < 0.001, ηp2 = 0.765). When data were collapsed over task, time to COP displacement onset following posterior perturbations was 10% slower than following anterior perturbations (Fig. 5C).
Time to peak COP displacement did not exhibit an interaction (F(1,15) = 0.513, p = 0.485, ηp2 = 0.033) nor main effect for task (F(1,15) = 0.958, p = 0.343, ηp2 = 0.060), but there was a perturbation direction effect (F(1,15) = 118.535, p < 0.001, ηp2 = 0.888). When data were collapsed over task, time to peak COP displacement following posterior perturbations was 27% slower than following anterior perturbations (Fig. 5D).
Hand kinematics
Anteroposterior peak hand displacement did not exhibit an interaction (F(1,15) = 2.384, p = 0.143, ηp2 = 0.137), but a main effect for task was detected (F(1,15) = 7.482, p = 0.015, ηp2 = 0.333). When data were collapsed over perturbation direction, peak hand displacement for the combined task was 5% less than the arm perturbation task. Further, there was also a main effect for perturbation direction (F(1,15) = 7.720, p = 0.014, ηp2 = 0.340). When data were collapsed over the task, peak hand displacement following posterior perturbations was 7% greater than following anterior perturbations (Fig. 6A).

Hand anteroposterior peak displacement (A) and hand anteroposterior peak velocity (B). Squares represent mean values (whiskers represent ± standard deviation), while dots represent individual data. Arm perturbation task values are represented by unfilled shapes, while combined task values are represented by filled shapes. Task main effects (p < 0.05) between arm perturbation and combined task conditions are indicated by an asterisk (*). Perturbation direction main effects (p < 0.05) between anterior and posterior perturbation directions are indicated by a dagger (†). Grey lines link individual data points between arm perturbation and combined tasks
For anteroposterior peak hand velocity, there was no interaction (F(1,15) = 2.996, p = 0.104, ηp2 = 0.166) or task effect (F(1,15) = 1.879, p = 0.191, ηp2 = 0.111). However, there was a perturbation direction effect (F(1,15) = 34.798, p < 0.001, ηp2 = 0.699). When data were collapsed over the task, peak hand velocity following anterior perturbations was 9% faster than following posterior perturbations (Fig. 6B).
Discussion
Through pairing an auditory working memory task with a standing balance task during a series of perturbed voluntary reaches, we explored how reactive balance control is affected by increased cognitive processing via assessment of various COP and hand kinematic variables. Performance of the cognitive task during the combined task condition was compared with completing the n-back task alone to demonstrate that the combined task paradigm effectively increased cognitive processing, and demonstrated a shift in attentional resources away from the cognitive task. During the combined task, n-back responses were slower and less accurate (Fig. 4) than the cognitive task performed in isolation. Our findings revealed the limited influence of increased cognitive processing on COP parameters with only peak COP displacement increasing in response to posterior perturbations during the combined compared to the arm perturbation task. Further, peak hand displacement decreased during the combined compared to arm perturbation task for both perturbation directions. The main findings indicate attentional resources were allocated from the cognitive task towards the reaching movements during the combined task paradigm. However, given that there were limited differences in COP variables between the combined and arm perturbation tasks, it appears that whole-body reactive balance control was overall unaltered with increased cognitive processing. While the combined task decreased peak hand displacement, the opposing outcome of COP displacement (i.e., increased following posterior hand perturbations, no change following anterior perturbations) suggests a disconnect between the reactive postural adjustments of the hand to perform a reaching task and the torso and lower limb to maintain balance control in response to a perturbation of the upper limb.
Re-allocation of cognitive resources for maintaining hand posture
The present study, involving a series of reaching movements, indicated that the addition of a cognitive task during a controlled reaching task had minimal or no effect on COP responses to a perturbation of the hand. However, as demonstrated by the decrease in peak hand displacement (Fig. 6A) and a concomitant decrease in performance of the cognitive task (Fig. 4) during the combined task paradigm, it is likely that the attentional capacity required for reaching was not sufficient. Therefore, attentional resources used for cognitive function were diverted towards maintaining upper limb posture as well as performing the voluntary reaching movements. Our current findings corroborate previous work (Bank et al. 2018; Broeder et al 2014) using combined tasks (e.g., goal-directed movement or handwriting) during sitting, such that prioritization of attentional resources is allocated towards upper limb movement rather than working memory.
Unaltered reactive whole-body postural adjustments in the presence of increased cognitive processing
Recently, Dierijck et al. (2020) examined the role of attention on the interaction between fast, goal-directed anterior reaching movements and upright postural control. A discrete, ballistic movement task was performed while standing and executed either concurrently with a button press simple reaction time task, or in isolation. During the combined task, the performance of both reaching and simple reaction time tasks decreased, as demonstrated by a slower execution of reaching and delayed button press responses. Anteroposterior whole-body postural adjustments during the combined task were also altered, as demonstrated by a slower time to peak COP displacement than the arm perturbation task. In addition, the study incorporated mediolateral perturbations to the hand while reaching in the anterior direction to assess whole-body reactive postural responses. Mediolateral peak COP velocity following the perturbation decreased during the combined compared to arm perturbation task. Taken together, the authors concluded that divided attention influenced both reaching and postural adjustments, and that attentional resources were required for both reaching and standing balance control.
The present study extends the findings of Dierijck et al. (2020) by evaluating cognitive contributions to reactive postural responses following hand perturbations during a continuous, cyclical series of mediolateral reaches. Our results demonstrate minimal changes in whole-body reactive balance responses (i.e., only increased posterior peak COP displacement) between the combined and arm perturbation tasks. Although our findings contrast those of Dierijck et al. (2020), it is important to take into consideration the differences in experimental paradigms. While both investigations reported decreased cognitive task performance, the reaching tasks used may have different effects on reactive balance adjustments to the mechanical hand perturbations. A ballistic, goal-oriented reaching task demands certain speed and accuracy requirements and may disrupt the body’s COP parameters greater than the steady, controlled, cyclical reaching movements used in the present study. Rapid, goal-directed reaching involves preceding anticipatory postural adjustments (Lowrey et al. 2017; Dierijck et al. 2020) owing to the planning of the proceeding hand movement (Kennefick et al. 2018); whereas the continuous movements performed in the present study required minimal anticipatory postural adjustments as reflected by the lack of change in anteroposterior COP displacement prior to hand perturbation onset (e.g., Fig. 3). Therefore, we suggest that steady, controlled, cyclic reaches provide less disruption to balance control compared to a discrete, ballistic, goal-oriented reaching task, such as the one used by Dierijck et al. (2020).
Previous work demonstrated that greater cognitive processing has a mixed effect on balance control. For example, studies have reported both increases (Yardley et al. 1999; Little and Woollacott 2014, 2015) and decreases (Stroffregen et al. 1999, 2000; Swan et al. 2004; Huxhold et al. 2006) in COP parameters. Further, the addition of a cognitive task in other studies did not alter whole-body balance displacement during quiet stance (Kerr et al. 1985; McGeehan et al. 2017) or during reactive balance control (Brown et al. 1999; Norrie et al. 2002; Redfern et al. 2002). Importantly, McGeehan et al. (2017) indicated that increased cognitive processing may be supplemented by a shift in sensory reweighting, such that a greater emphasis is placed on sensory cues to maintain quiet standing balance. For example, the vestibular-evoked balance response increased in the presence of increased cognitive processing, indicating a greater reliance on the vestibular control of balance to compensate for the divide in attentional resources with the addition of a cognitive task (McGeehan et al. 2017). It is possible the combined task in the present study modified cortical factors associated with whole-body balance adjustments, but the influence of these attention-related changes on postural control were diminished by an elevated reliance on vestibular, or possibly other sensory signals. As such, the COP responses observed here remained mostly unaltered when also performing a cognitive task.
In contrast, perhaps the hand perturbations used in the current study were not destabilizing enough to require attentional resources for whole-body reactive balance control, therefore increased cognitive processing would have no direct effect on balance adjustments. Previously, cortical resources have been demonstrated to play a role in postural responses as shown with electroencephalographic recordings during dual-task paradigms (Quant et al. 2004; Little and Woollacott 2015; Bogost et al. 2016). More specifically, the N1 response, as recorded over the motor and somatosensory cortical areas, likely reflects the sensory processing of the balance disturbance at the level of the cortex (Dietz et al. 1984, 1985; Quant et al. 2005). The N1 event-related potential (ERP) amplitude is attenuated when a cognitive demanding task is combined with a whole-body reactive balance paradigm. For example, Quant et al. (2004) reported a decreased N1 ERP amplitude when combining a visuomotor tracking task with transient anteroposterior translations while standing. Compared to the reactive balance task in isolation, the addition of a cognitive task increased anteroposterior COP peak displacement magnitude and lower limb muscle activity combined with a decreased N1 ERP amplitude. The dual-task paradigm may have also altered visuomotor tracking performance, however, changes in the cognitive task were not evaluated in that study (Quant et al. 2004). Little and Woollacott (2015) reported a decreased N1 ERP amplitude during a visual working memory task paired with anteroposterior support surface translations compared to performing the reactive standing balance task alone. The dual-task condition reduced visual working memory capacity as well as increased COP trajectory peak amplitude. Although the present study found minimal changes in anteroposterior COP variables between the combined and arm perturbation tasks, the magnitudes of our COP responses were greater than those reported by Dierijck et al. (2020), indicating that the hand perturbations used in the current study were likely large enough to draw cognitive resources towards the whole-body balance adjustments. Therefore, reactive balance control was likely affected during the combined task, however, changes that may have occurred with enhanced cognitive demand could have been supplemented by sensory reweighting from other sensorimotor sources within the balance system.
Decoupling between the hand and centre of pressure responses
Given the lack of consistency between the hand kinematics and COP results when comparing the arm perturbation to combined task in this study, it is possible that there is a disconnect between the upper and lower limb postural control when responding to perturbations of the hand in the presence of increased cognitive processing. During a rapid, goal-directed reaching task, Lowrey et al. (2017) reported that evoked upper limb muscle responses proceeded hand perturbations by 50-ms, which was followed by lower limb activity at ~ 60–70-ms, and COP adjustments after 100-ms. The authors (Lowrey et al. 2017) suggested that the upper limb reaction likely drove the lower-limb postural response, and subsequently generated COP adjustments. However, the present study demonstrated inconsistent alterations in responses between the hand and COP values with increased cognitive processing, indicating a disconnect between the central nervous system’s control of the upper and lower limbs in the experimental paradigm used here. Specifically, during the combined task compared with the arm perturbation task, peak COP displacement increased following posterior perturbations, but all other COP variables were unchanged with increased cognitive processing. Peak hand displacement, however, decreased with increased cognitive processing for both perturbation directions. It is unclear why the hand and whole-body balance adjustments demonstrate opposing results. The whole-body balance responses observed here may not have required attentional resources following the perturbation of the upper limb. Alternatively, following perturbations to the hand, attentional resources were likely shifted away from the balance responses, as highlighted by no change or an increase in COP peak displacement for the posterior perturbation. The central nervous system would subsequently prioritize the hand movements, similar to that previously observed for gaze strategy requirements over balance control during a reaching task (Stamenkovic et al. 2018). Perhaps during the combined task, muscle stiffness in the upper limb increased owing to co-contraction of the agonist and antagonist muscles (Carpenter et al. 1999, 2001). Co-contraction has been previously shown to increase with task difficulty (Horak and Nashner 1986) and an increase in postural threat (Carpenter et al. 2001). Therefore, it is possible that greater cognitive processing from the combined task increased co-contraction of the upper limb, contributing to decreased hand displacement. Meanwhile, COP responses overall remained unaltered, suggesting that arm posture and whole-body balance responses are independently controlled. Unfortunately, in the current study we did not evaluate surface electromyography activity of muscles controlling the upper limb and are unable to speculate on neuromuscular control strategies responsible for the decreased peak hand displacement observed here in the combined compared to arm perturbation task.
Differential reactive postural responses following posterior compared with anterior perturbations
Interestingly, multiple postural responses as characterized with the COP parameters and hand kinematics following perturbations in the posterior direction demonstrated amplitudes that were increased, but slower compared to the anteriorly directed perturbations. Specifically, during the combined task, peak COP displacement and velocity following posterior perturbations were greater and slower, respectively, than the anterior perturbations. The slower velocity corresponded to a longer time to COP displacement onset and peak during both the arm perturbation and combined task for the posterior perturbations (Fig. 5). In addition, peak hand displacement and velocity were greater and slower, respectively, following posterior perturbations compared to anterior perturbations (Fig. 6). When standing upright, the body’s center of mass is located approximately at the height of the sacral vertebrae, and positioned anteriorly of the ankles (Winter 1995). To prevent the body from toppling forward, active torque about the ankles via muscle activation is generated through co-contraction of antagonistic muscles crossing the ankle joint, while passive ankle stiffness is generated by the plantar flexors (Winter et al. 1998; Peterka 2002). When perturbed in the anterior direction, the body must rely on the plantar flexors to pull the body upright for postural equilibrium. However, when the body is perturbed posteriorly, the dorsiflexors react to keep the body upright (Horak and Nashner 1986). Given the spring-like muscle stiffness of the plantar flexors (Winter et al. 1998) prior to the perturbation it is likely that they are able to respond quicker than the dorsiflexors to prevent the body from experiencing greater COP displacement when perturbed. Therefore, in the current study, we observed greater peak COP displacement and slower peak COP velocity following posterior perturbations compared with anterior perturbations.
Considerations
As previously mentioned, future studies should examine muscle activity of the upper limbs to provide further insight into possible neuromuscular control strategies responsible for the decreased hand displacement observed with increased cognitive processing. Another factor of our study that is important to address is the amount of postural support provided by the KINARM itself. Although the KINARM handle can move freely within the horizontal plane, it may provide some support via the application of vertical forces. When gripping an earth-fixed object, the whole-body balance response is produced as a composite of both forces directed through the ground reaction forces acting on the body as well as the forces acting on the upper limb (Smith et al. 2017). In addition, different grip strategies can alter whole-body balance adjustments (Smith et al. 2017). As such, participants were instructed to hold the handle, but not support the body with the handle of the device and perform each task similarly. However, vertical forces and other reactive forces acting between the hand and handle were unable to be monitored, and is, therefore, a limitation of our study. Further, analysis of vertical forces through the force plate may also provide insight towards the level of postural support provided by the KINARM, and should likely be considered in future studies.
Conclusion
We examined the effects of increased cognitive processing on reactive postural control in response to mechanical, anteroposterior perturbations of the hand. Cyclical, mediolateral reaching was performed while standing and paired with an auditory working memory task to increase cognitive processing. As demonstrated by slowed response times and decreased accuracy (Fig. 4) of the n-back task during the combined compared with the cognitive task, cognitive processing was effectively increased and diverted attentional resources away from the working memory task. During the combined task, there were minimal differences observed for COP parameters, while peak hand displacement decreased compared to the arm perturbation task. Within the presence of divided attention, it is clear cognitive resources were re-allocated towards the maintenance of hand posture during a series of continuous, cyclical reaches. In contrast, the limited changes in COP parameters with increased cognitive processing may be owing to sensory reweighting from other sensorimotor sources for maintaining reactive balance control or the limited requirement for attentional resources in the current context. Further, the hand kinematics and COP variables demonstrated inconsistent findings with increased cognitive processing, suggesting a decoupling between reactive postural responses of the hand and standing balance. Regardless, increased cognitive processing re-allocated attentional resources from the cognitive task towards the upper limb, while whole-body balance adjustments appeared unaltered.
Availability of data and material
Available upon request.
Code availability
Available upon request.
References
Adkin AL, Quant S, Maki BE, McIlroy WE (2006) Cortical responses associated with predictable and unpredictable compensatory balance reactions. Exp Brain Res 172(1):85–93. https://doi.org/10.1007/s00221-005-0310-9
Allum JHJ, Carpenter MG, Adkin AL (2001) Balance control analysis as a method for screening and identifying balance deficits. Ann N Y Acad Sci 942(1):413–427. https://doi.org/10.1111/j.1749-6632.2001.tb03763.x
Allum JHJ, Carpenter MG, Honegger F, Adkin AL, Bloem BR (2002) Age-dependent variations in the directional sensitivity of balance corrections and compensatory arm movements in man. J Physiol 542(2):643–663. https://doi.org/10.1113/jphysiol.2001.015644
Andersson G, Yardley L, Luxon L (1998) A dual-task study of interference between mental activity and control of balance. Am J Otol 19(5):632–637
Bank PJM, Marinus J, van Tol RM, Groeneveld IF, Goossens PH, de Groot JH, van Hilten JJ, Meskers CGM (2018) Cognitive-motor interference during goal-directed upper-limb movements. Eur J Neurosci 48(10):3146–3158. https://doi.org/10.1111/ejn.14168
Bogost MD, Burgos PI, Little CE, Woollacott MH, Dalton BH (2016) Electrocortical sources related to whole-body surface translations during a single-and dual-task paradigm. Front Hum Neurosci 10:524
Braver TS, Cohen JD, Nystrom LE, Jonides J, Smith EE, Noll DC (1997) A parametric study of prefrontal cortex involvement in human working memory. Neuroimage 5(1):49–62
Broeder S, Nackaerts E, Nieuwboer A, Smits-Engelsman BCM, Swinnen SP, Heremans E (2014) The effects of dual tasking on handwriting in patients with Parkinson’s disease. Neuroscience 263:193–202. https://doi.org/10.1016/j.neuroscience.2014.01.019
Brown LA, Shumway-Cook A, Woollacott MH (1999) Attentional demands and postural recovery: the effects of aging. J Gerontol Series A 54(4):M165–M171
Carpenter MG, Allum JH, Honegger F (1999) Directional sensitivity of stretch reflexes and balance corrections for normal subjects in the roll and pitch planes. Exp Brain Res 129(1):93–113
Carpenter MG, Frank JS, Silcher CP, Peysar GW (2001) The influence of postural threat on the control of upright stance. Exp Brain Res 138(2):210–218
Dierijck J, Kennefick M, Smirl J, Dalton BH, van Donkelaar P (2020) Attention is required to coordinate reaching and postural stability during upper limb movements generated while standing. J Mot Behav 52(1):79–88. https://doi.org/10.1080/00222895.2019.1587351
Dietz V, Quintern J, Berger W (1984) Cerebral evoked potentials associated with the compensatory reactions following stance and gait perturbation. Neurosci Lett 50(1):181–186. https://doi.org/10.1016/0304-3940(84)90483-X
Dietz V, Quintern J, Berger W, Schenck E (1985) Cerebral potentials and leg muscle emg responses associated with stance perturbation. Exp Brain Res 57(2):348–354
Horak FB, Nashner LM (1986) Central programming of postural movements: adaptation to altered support-surface configurations. J Neurophysiol 55(6):1369–1381. https://doi.org/10.1152/jn.1986.55.6.1369
Horak FB, Nashner LM, Diener HC (1990) Postural strategies associated with somatosensory and vestibular loss. Exp Brain Res 82(1):167–177. https://doi.org/10.1007/BF00230848
Huxhold O, Li SC, Schmiedek F, Lindenberger U (2006) Dual-tasking postural control: aging and the effects of cognitive demand in conjunction with focus of attention. Brain Res Bull 69(3):294–305
Kahneman D (1973) Attention and effort. Prentice-Hall, Englewood Cliffs
Kennefick M, Wright AD, Smirl JD, van Donkelaar P (2018) Anticipatory postural adjustments as a function of response complexity in simple reaction time tasks. Neurosci Lett 684:1–5
Kerr B, Condon SM, McDonald LA (1985) Cognitive spatial processing and the regulation of posture. J Exp Psychol Hum Percept Perform 11(5):617
Kirchner WK (1958) Age differences in short-term retention of rapidly changing information. J Exp Psychol 55(4):352
Lajoie Y, Teasdale N, Bard C, Fleury M (1993) Attentional demands for static and dynamic equilibrium. Exp Brain Res 97(1):139–144
Lin S, Woollacott MH (2002) Postural muscle responses following changing balance threats in young, stable older, and unstable older adults. J Mot Behav 34(1):37–44. https://doi.org/10.1080/00222890209601929
Little CE, Woollacott M (2014) Effect of attentional interference on balance recovery in older adults. Exp Brain Res 232(7):2049–2060
Little CE, Woollacott M (2015) EEG measures reveal dual-task interference in postural performance in young adults. Exp Brain Res 233(1):27–37
Lowrey C, Nashed J, Scott S (2017) Rapid and flexible whole body postural responses are evoked from perturbations to the upper limb during goal-directed reaching. J Neurophysiol 117(3):1070–1083. https://doi.org/10.1152/jn.01004.2015
Maki BE, McIlroy WE (2007) Cognitive demands and cortical control of human balance-recovery reactions. J Neural Transm 114(10):1279–1296
Massion J (1998) Postural control systems in developmental perspective. Neurosci Biobehav Rev 22(4):465–472
McGeehan MA, Woollacott MH, Dalton BH (2017) Vestibular control of standing balance is enhanced with increased cognitive load. Exp Brain Res 235(4):1031–1040
Monk AF, Jackson D, Nielsen D, Jefferies E, Olivier P (2011) N-backer: an auditory n-back task with automatic scoring of spoken responses. Behav Res Methods 43(3):888
Nashner LM (1976) Adapting reflexes controlling the human posture. Exp Brain Res 26(1):59–72. https://doi.org/10.1007/BF00235249
Norrie RG, Maki BE, Staines WR, McIlroy WE (2002) The time course of attention shifts following perturbation of upright stance. Exp Brain Res 146(3):315–321
Pellecchia GL (2003) Postural sway increases with attentional demands of concurrent cognitive task. Gait Posture 18(1):29–34
Peterka RJ (2002) Sensorimotor integration in human postural control. J Neurophysiol 88(3):1097–1118. https://doi.org/10.1152/jn.2002.88.3.1097
Quant S, Adkin AL, Staines WR, Maki BE, McIlroy WE (2004) The effect of a concurrent cognitive task on cortical potentials evoked by unpredictable balance perturbations. BMC Neurosci 5(1):18
Quant S, Maki BE, McIlroy WE (2005) The association between later cortical potentials and later phases of postural reactions evoked by perturbations to upright stance. Neurosci Lett 381(3):269–274
Rasman BG, Forbes PA, Tisserand R, Blouin JS (2018) Sensorimotor manipulations of the balance control loop–beyond imposed external perturbations. Front Neurol 9:899
Redfern MS, Müller ML, Jennings JR, Furman JM (2002) Attentional dynamics in postural control during perturbations in young and older adults. J Gerontol A Biol Sci Med Sci 57(8):B298–B303
Santos MJ, Kanekar N, Aruin AS (2010a) The role of anticipatory postural adjustments in compensatory control of posture: 1. Electromyographic analysis. J Electromyogr Kinesiol 20(3):388–397
Santos MJ, Kanekar N, Aruin AS (2010b) The role of anticipatory postural adjustments in compensatory control of posture: 2. Biomechanical analysis. J Electromyogr Kinesiol 20(3):398–405
Shumway-Cook A, Woollacott M (2000) Attentional demands and postural control: the effect of sensory context. J Gerontol A Biol Sci Med Sci 55(1):M10-16
Smith CP, Allsop JE, Mistry M, Reynolds RF (2017) Co-ordination of the upper and lower limbs for vestibular control of balance. J Physiol 595(21):6771–6782
Stamenkovic A, Stapley PJ, Robins R, Hollands MA (2018) Do postural constraints affect eye, head, and arm coordination? J Neurophysiol 120(4):2066–2082
Stoffregen TA, Smart LJ, Bardy BG, Pagulayan RJ (1999) Postural stabilization of looking. J Exp Psychol 25(6):1641–1658. https://doi.org/10.1037/0096-1523.25.6.1641
Stoffregen TA, Pagulayan RJ, Bardy BG, Hettinger LJ (2000) Modulating postural control to facilitate visual performance. Hum Mov Sci 19(2):203–220. https://doi.org/10.1016/S0167-9457(00)00009-9
Swan L, Otani H, Loubert PV, Sheffert SM, Dunbar GL (2004) Improving balance by performing a secondary cognitive task. Br J Psychol 95(1):31–40
Trivedi H, Leonard JA, Ting LH, Stapley PJ (2010) Postural responses to unexpected perturbations of balance during reaching. Exp Brain Res 202(2):485–491. https://doi.org/10.1007/s00221-009-2135-4
Wickens CD (1983) Processing resources in attention, dual task performance and workload assessment. In: Parasuraman R, Davies R (eds) Varieties of attention. Academic Press, New York, pp 63–102
Winter DA (1995) Human balance and posture control during standing and walking. Gait Posture 3(4):193–214
Winter DA, Patla AE, Prince F, Ishac M, Gielo-Perczak K (1998) Stiffness control of balance in quiet standing. J Neurophysiol 80(3):1211–1221
Woollacott M, Shumway-Cook A (2002) Attention and the control of posture and gait: a review of an emerging area of research. Gait Posture 16(1):1–14
Woollacott M, Vander Velde T (2008) Non-visual spatial tasks reveal increased interactions with stance postural control. Brain Res 1208:95–102
Wulf G, McNevin N, Shea CH (2001) The automaticity of complex motor skill learning as a function of attentional focus. Q J Exp Psychol Sect A 54(4):1143–1154
Yardley L, Gardner M, Leadbetter A, Lavie N (1999) Effect of articulatory and mental tasks on postural control. NeuroReport 10(2):215–219
Acknowledgements
The authors would like to thank the participants who volunteered in this study. Operating funds for this study were provided through a Discovery Grant from the Natural Sciences and Engineering Research Council of Canada (2017-06632) and infrastructure was supported by the Canada Foundation for Innovation (30979).
Funding
This work was supported by the Natural Sciences and Engineering Research Council of Canada (2017-06632) and the Canada Foundation for Innovation (30979).
Author information
Authors and Affiliations
Contributions
M.T. conceived the study concept, collected and analyzed data, wrote the first draft of the manuscript and edited the manuscript. B.H.D. conceived the study concept, helped with data analysis, collection and interpretation, and reviewed and edited the manuscript. M.K. helped conceive and design experimental design, helped with interpretation of data, and reviewed and edited the manuscript. S.C. helped with data collection and analysis as well as reviewing and editing the manuscript. P.v.D. helped with data interpretation, experimental design as well as reviewing and editing the manuscript. All authors approved the submitted version of the manuscript and agree to be accountable for all aspects of the work.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Ethical Approval
This study was performed in line with the Canada's Tri-Council Policy Statement on Ethical Conduct for Research Involving Humans. The study procedures were approved by the University of British Columbia’s Clinical Research Ethics Board (No. H19-01982).
Consent to participate
All participants included in the study provided oral and written informed consent.
Consent for publication
Not applicable.
Additional information
Communicated by Francesco Lacquaniti.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Trotman, M., Kennefick, M., Coughlin, S. et al. The effect of increased cognitive processing on reactive balance control following perturbations to the upper limb. Exp Brain Res 240, 1317–1329 (2022). https://doi.org/10.1007/s00221-022-06326-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-022-06326-6