
Abstract
In sequential, repetitive tasks, we often partially reuse former motor plans. This causes a persistence of an earlier adopted posture (termed motor hysteresis). The cost-optimization hypothesis states that a partial reuse reduces the cognitive cost of a movement, while the persistence in a former posture increases its mechanical cost. An optimal fraction of reuse, which depends on the relative cognitive and mechanical cost, minimizes the total movement cost. Several studies postulate differences in mechanical or cognitive cost as a result of hemispheric lateralization. In the current study, we asked whether these differences would result in different fractions of motor plan reuse. To this end, left- and right-handed dominant participants executed a sequential motor task (opening a column of drawers) with their dominant and non-dominant hand. The size of the motor hysteresis effect was measured as a proxy for the fraction of plan reuse. Participants used similar postures and exhibited a similar hysteresis effect, irrespective of hand and handedness. This finding indicates that either the cognitive and mechanical costs of a motor task are unaffected by hemispheric differences or that their effect on motor planning is negligible.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
In sequential, repetitive motor tasks, such as opening a column of drawers in a/descending sequences, we do not create a new motor plan from scratch for each movement. Instead, we reuse and modify our previous motor plan (Rosenbaum and Jorgensen 1992). This reuse of the previous plan causes a persistence of the previously adopted posture. In descending sequences of drawers, participants adopt a pronated posture at the highest drawer and persist in a more pronated posture for the rest of the drawers (Schütz et al. 2011). In ascending sequences, they persist in a more supinated posture. The posture at each drawer therefore depends on the movement history of the motor system, a behavior that was termed motor hysteresis (Kelso et al. 1994). Motor hysteresis in posture selection has been reliably demonstrated in a large number of studies (Rosenbaum and Jorgensen 1992; Weigelt et al. 2009; Schütz and Schack 2013, 2015; Schütz et al. 2017).
According to the plan-modification hypothesis (Rosenbaum et al. 2007), partial reuse of the previous plan reduces the cognitive cost of motor planning. In recent years, we extended the plan-modification hypothesis into the cost-optimization model (Schütz et al. 2016) to incorporate the mechanical cost of the motor task. The model assumes that motor plans are created with some reuse of the previous plan. With increasing fraction of reuse (less motor re-planning), the cognitive cost of motor planning decreases (see Fig. 1a, dotted gray line) but the persistence of the previous posture becomes more pronounced. Participants adopt more awkward joint-angle configurations and, thus, the mechanical cost of motor execution increases (see Fig. 1a, solid gray line). The sum of the cognitive and mechanical cost (see Fig. 1a, solid black line) is minimized at an ‘equilibrium point’, at which the descent of the cognitive cost function equals the ascent of the mechanical cost function. This ‘equilibrium point’ determines the optimal fraction of reuse for the task and, thus, the size of the motor hysteresis effect.

Model of the cost-optimization function. a Cognitive cost (dotted gray line) decreases with the fraction of reuse, and mechanical cost increases (solid gray line). Cost factors follow a power function xp (|p| > 1). Total movement cost (solid black line) is minimized at a specific fraction of reuse (dotted black line). b An increase in mechanical cost reduces the optimal fraction of reuse. c–f Model predictions based on hemispheric differences in cognitive/mechanical cost for left- and right-handed dominant participants
The cost-optimization model can be used to predict how changes in cognitive and mechanical cost shift the optimal fraction of reuse and, thus, affect the size of the hysteresis effect. For example, if the mechanical cost of the task increases, the ‘equilibrium point’ should shift to a lower fraction of reuse (see Fig. 1b) and the size of the hysteresis effect should be reduced. This prediction has been verified in a previous study (Schütz and Schack 2013) where participants executed a sequential drawer task. The hand orientation used for grasping the drawer handles was measured as the dependent variable. A significant hysteresis effect was found in the baseline condition. After an increase in mechanical cost (of the task) for ten sequences, the size of the hysteresis effect was significantly reduced.
In a similar fashion, one can predict how intrinsic differences, resulting from the lateralization of the vertebrate brain (MacNeilage et al. 2009), should shift the optimal fraction of reuse. For anticipatory motor planning, studies support the notion of a left-hemispheric dominance: left-hemispheric damage severely impairs performance in anticipatory grasp planning (Mutsaarts et al. 2007; Crajé et al. 2009). Janssen et al. (2009, 2011) found anticipatory grasp planning in a bimanual task to be more pronounced for the right hand, independent of handedness of the participants. From this result, the authors concluded that motor planning is a specialized function of the left hemisphere.
The effects of task specialization on neural activation have been investigated in neuroimaging studies via positron emission tomography. For a number of different motor tasks and short practice periods (days to weeks), studies found a practice-related increase in neural activation in the primary motor cortex (M1) and premotor areas (Iacoboni et al. 1996; Hazeltine et al. 1997; Honda et al. 1998; Debaere et al. 2004). In contrast, long-term practice resulted in a reduced or more focused activation of M1 and the premotor areas during sequential motor tasks (Hund-Georgiadis and von Cramon 1999; Jäncke et al. 2000; Krings et al. 2000; Haslinger et al. 2004; Meister et al. 2005). This reduction has been attributed to an increased efficiency of the underlying neural circuits (Jäncke et al. 2000; Krings et al. 2000; Poldrack 2000; Haslinger et al. 2004; Kelly and Garavan 2004).
The most conclusive study on the effects of long-term practice measured both the metabolic ([14C]2-deoxyglucose uptake) and neural (single-neuron recording) activity in M1 of monkeys (Picard et al. 2013). The monkeys were trained for up to 6 years to perform a sequential reaching task. The authors found a significant reduction in metabolic activity after long-term training, but no change in neural activation, indicating an increase in efficiency of the neural circuits: to generate the motor activation necessary for the execution of the task, less synaptic activity and less metabolic activity were required. Therefore, in the current study, if the left hemisphere was specialized in motor planning as indicated by Janssen et al. (2009, 2011), its cognitive cost for motor planning should be lower.
Hemispheric specialization has not only been attributed to motor planning, but to the mechanical cost of motor execution as well. The dynamic-dominance hypothesis (Sainburg 2002) claims that the dominant hemisphere is superior in the control of inertial dynamics, due to a better coordination of muscle torques: In the dominant arm, muscle torques and interaction torques act agonistically to create the movement (Coelho et al. 2013). This reduces the total torque impulse (Bagesteiro and Sainburg 2002) and, thus, the mechanical cost (Sainburg 2014). The non-dominant hemisphere, on the other hand, exhibits a better impedance control by muscle co-activation. This co-activation in the non-dominant arm provides better stability against perturbations, but increases the mechanical cost (Sainburg 2014). If the dynamic-dominance hypothesis was true, we would expect higher mechanical cost for movements of the non-dominant arm.
In the current study, we asked how differences in cognitive cost (as proposed by Janssen et al. 2009, 2011) and in mechanical cost (as proposed by Sainburg 2002) would affect the fraction of reuse and, thus, the size of the hysteresis effect. To this end, we applied the differences to the cost-optimization model (see Fig. 1c–f). If the hypothesis by Janssen et al. (2009, 2011) was true, we expected a smaller cognitive cost of planning in the right hand (see Fig. 1e,f, dotted gray lines) and a larger cognitive cost in the left hand (see Fig. 1c,d, dotted gray lines), independent of handedness. If the hypothesis by Sainburg (2002) was true, we expected a lower mechanical cost in the dominant hand (i.e., the right hand of right-handed dominant and the left hand of left-handed dominant participants; see Fig. 1c, f, solid gray lines) and a higher mechanical cost in the non-dominant hand (see Fig. 1d, e, solid gray lines).
Based on the model, we predicted a similar fraction of reuse in the left and right hand of right-handed dominant participants (only if hemispheric differences in cognitive and mechanical cost were similar; see Fig. 1d, f, dotted black lines), but a different fraction of reuse in left-handed dominant participants (see Fig. 1c, e, dotted black lines). More specifically, if both hypotheses held true, there should be a larger fraction of reuse in the left, dominant hand of left-handed dominant participants (see Fig. 1c, dotted black line) and a smaller fraction of reuse in their right hand (see Fig. 1e, dotted black line). The size of the hysteresis effect is directly related to the fraction of reuse (Schütz et al. 2016). Thus, we expected a similarly sized hysteresis effect in the left and right hand of the right-handed dominant participants (see Fig. 2, black lines). For the left-handed dominant participants, we expected a larger hysteresis effect in the left hand, but a smaller effect in the right hand (see Fig. 2, gray lines).

Model prediction for the hand orientation angle α for the dominant and non-dominant hand, separated by ‘handedness’ (gray lines for left-handed, black lines for right-handed dominant) and ‘order’ (filled circles for descending, empty circles for ascending). Averaged values of the measured data (cf. Figure 5) were used for the mean and the error bars
To test this, we designed a sequential drawer-opening task. Left- and right-handed dominant participants had to execute a/descending sequences of trials both with their dominant and non-dominant hand. Global hand orientation at the moment of drawer grasp was measured as the dependent variable.
If both hypotheses held true, but differences in cognitive and mechanical cost were dissimilar in size, a dissimilar hysteresis effect in the left and right hand of right-handed dominant participants would be predicted as well. Hemispheric differences in cognitive and mechanical cost act synergistically in the left-handed dominant participant group, but counteract each other in the right-handed dominant group. Therefore, the difference in hysteresis effect in the left-handed dominant participant group is a proxy for the added effects of the hemispheric differences, and the difference in the right-handed dominant group is a proxy for their subtracted effects. Based on the pattern of hysteresis effects in both groups, the size of the hemispheric differences in cognitive and mechanical cost can be estimated.
We expected a significant interaction of the factors ‘handedness’ (left-/right-handed dominant), ‘hand’ (dominant/non-dominant), and movement ‘order’ (a/descending), as the size of the motor hysteresis effect should only vary as a function of ‘hand’ in the left-handed dominant participant group. If only one of the hypotheses was true, the between-subjects factor ‘handedness’ could be removed and both participant groups (left-/right-handed dominant) could be combined. If only the hypothesis by Sainburg (2002) was true, we would expect a larger hysteresis effect in the dominant hand of both right- and left-handed dominant participants (see Fig. S1) and, thus, a significant interaction of the factors ‘hand’ (dominant/non-dominant) and ‘order’ (a/descending). If only the hypothesis by Janssen et al. (2009, 2011) was true, we would expect a larger hysteresis effect in the left hand of all participants (see Fig. S2). In this case, to remove the between-subjects factor ‘handedness’, the factor ‘hand’ had to be re-encoded from dominant/non-dominant to left/right. We then expected a significant interaction of the re-encoded factor ‘hand’ (left/right) and the factor ‘order’ (a/descending).
Materials and methods
Participants
Forty-six students (28 females, 18 males, age 23.8 ± 3.3 years) from Bielefeld University participated in the experiment in exchange for course credit or 5€. Participants were recruited in two groups based on their handedness (self-report). Twenty-four participants saw themselves as right-handed (self-report). Of these 24 participants, 22 were right-handed [handedness score (HS) .98 ± .05] and two ambidextrous (HS .14 ± .06) according to the revised Edinburgh Inventory (Oldfield 1971). Twenty-two participants saw themselves as left-handed (self-report). Of these 22, 16 were left-handed (HS − 0.93 ± 0.14) and 6 ambidextrous (HS − 0.22 ± 0.12). Each participant read a detailed set of instructions on the task and provided written informed consent before the experiment. The study was approved by the local ethics committee and in accordance with the latest revision (World Medical Association 2013) of the 1964 Declaration of Helsinki.
Apparatus
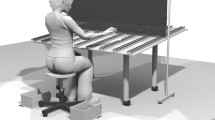
The apparatus used was a tall metal frame (222 cm high, 40 cm wide and 30 cm deep) with nine wooden shelves (see Fig. 3a). A wooden drawer (8.5 cm high, 20 cm wide and 30 cm deep; pullout range 21.5 cm) was placed on each shelf. At the center of each drawer front, a gray plastic ring with a diameter of 7 cm and a depth of 4 cm was affixed. On both sides of each drawer, a number from 1 (lowest) to 9 (highest) was attached.

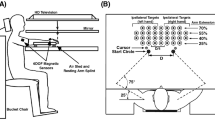
a Schematic of the experimental setup. Drawer height, drawer spacing, and participant’s positions are scaled based on shoulder height and arm length. Two stripes of black tape each mark the participant’s positions for left/right-handed task execution. b Hand orientation angle α at the moment of drawer grasp. The projection of the wrist vector v onto the drawer face (x-z-plane) is used to calculate the hand orientation angle α
Preparation
Retroreflective markers were attached to four bony landmarks on the left (L) and right (R) arm of the participant, respectively: most cranial point of the acromion (L/R AC), radial (L/R RS) and ulnar (L/R US) styloid process, and top of the third metacarpal (L/R MC). The average height of the shoulder joint centers (0.97 × height of L/R AC) and the average arm length (between L/R AC and L/R RS) of the participant were measured in a t-pose (arms extended sideways and palms pointed forward).
The center of drawer #7 was aligned with the average height of the shoulder joint centers. Drawer spacing was set to 0.25 × average arm length. The participant was positioned with the shoulder joint center 1.00 × average arm length in front of the drawer face, once with the right shoulder joint center 0.33 × average arm length to the left of the drawer center and once with the left shoulder joint center 0.33 × average arm length to the right of the drawer center. The left and right positions were marked by two strips of black tape each: point of the toes and median plane of the body (see Fig. 3a).
Procedure
The experiment was split into two tasks. A task consisted of up to 16 sequences of nine trials. A trial was defined as the opening and closing of one drawer. Each trial started from an initial position, with the palm of the hand touching the thigh. The participant had to (1) raise the arm to the drawer, (2) grasp the handle with a five-finger grip (see Fig. 3b), (3) fully open the drawer, (4) close the drawer, and (5) return to the initial position.
In task 1, the participant performed eight randomized sequences of the nine drawers, four with the left and right hand, respectively (2 hands × 4 repetitions × 9 drawers: 72 trials). Hand sequence was randomized. For the drawer sequence, a pseudo-random list (Mersenne twister algorithm; Matsumoto and Nishimura 1998) was created before the experiment. From this list, the experimenter announced the next drawer number as soon as the arm was back in the initial position.
In task 2, the participants performed 16 ordered sequences of the nine drawers, 8 with the left and right hand, respectively. For each hand, four ascending and four descending sequences were tested (2 hands × 2 movement orders × 4 repetitions × 9 drawers: 144 trials). Hand sequence and movement order sequence were randomized. The experimenter did not announce individual drawer numbers, but only the order of the next sequence (‘from top to bottom’/‘from bottom to top’). The participants executed the nine trials of each sequence on their own.
All participants conducted task 1 first to get accustomed to the experiment. Before each task, the position of the participant in front of the apparatus was checked based on the left or right floor marks. Participants had a resting period of 30 s between sequences and of 4 min between tasks. The entire experiment lasted approximately 45 min.
Kinematic analysis
Movement data were recorded by a Vicon MX (Vicon Motion Systems, Oxford, UK) motion capture system. Marker trajectories were reconstructed in Vicon Nexus 1.8.5, labeled manually, and exported to MATLAB (2015a, The MathWorks, Natick, MA) for data analysis. The laboratory’s coordinate system was defined with the x-axis pointing to the right, the y-axis pointing to the front and the z-axis pointing upward while standing in front of the apparatus (see Fig. 3b).
To identify the moment of drawer grasp for each trial, the y-component (perpendicular to the drawer face, see Fig. 3b) of the capitulum marker (L/R MC) was analyzed. Its trajectory started from a low initial value (the initial posture) and exhibited two local maxima before returning to the initial value. The first local maximum, which corresponded to the moment of drawer grasp, was used to calculate the global hand orientation angle α.
For the calculation of the hand orientation angle α, the wrist axis was projected onto the drawer face (x-z-plane, see Fig. 3b). A direction vector v was defined, pointing from US to RS: v = RS − US. From the vector components vx and vz, the hand orientation angle α was calculated with the four-quadrant inverse tangent function of MATLAB. The vector component vy was negligible during drawer grasp, due to the five-finger grip enforced in the experiment.
For the left hand, the sign of vx was inverted before the inverse tangent calculation. The hand orientation angle was zero when the back of the right/left hand pointed directly to the right/left side (and, therefore, v pointed directly upward). Pronation of the hand caused an increase, and supination a decrease of the hand orientation angle.
Results
To compare grasp postures between hands as a function of handedness, a repeated measures analysis of variance (rmANOVA) was calculated on the hand orientation angles α of task 1 (randomized). ‘Hand’ (dominant/non-dominant) was a within-subject and ‘handedness’ (left-/right-handed dominant) a between-subjects factor. The within-subject factors ‘repetition’ and ‘drawer’ were averaged to reduce variance. The Greenhouse–Geisser correction was applied to the p values of each rmANOVA.
Main effects of ‘hand’ and ‘handedness’ were not significant. Grasp postures did not differ between left- and right-handed dominant participants. There was a significant interaction of ‘hand’ × ‘handedness’, F(1,44) = 4.773, p = .034, \(\eta_{p}^{2}\) = 0.098. Individual rmANOVAs on the hand orientation angles of the left- and right-handed participants revealed no significant main effect of ‘hand’ in the right-handed dominant group, but a significant main effect in the left-handed dominant group, F(1,21) = 7.984, p = .010, \(\eta_{p}^{2}\) = 0.275. Left-handed dominant participants used a more pronated grasp (+ 6.03°) in their non-dominant (right) hand (see Fig. 4).

Hand orientation angle α for left- and right-handed dominant participants. Each data point represents the average across the factors ‘drawer’, ‘repetition’, and ‘participant’. Data were separated by ‘hand’ (black circles for dominant, white circles for non-dominant). Error bars indicate 95% within-subject confidence intervals
To compare the size of the motor hysteresis effect (and, thus, the fraction of reuse) as a function of handedness and hand, an rmANOVA was calculated on the hand orientation angles α of task 2 (ordered). ‘Hand’ (dominant/non-dominant) and movement ‘order’ (a/descending) were within-subject factors; ‘handedness’ (left-/right-handed dominant) was a between-subjects factor. The within-subject factors ‘repetition’ and ‘drawer’ were averaged to reduce variance. If both hypotheses held true, we expected a smaller hysteresis effect in the non-dominant hand of left-handed dominant participants and a larger hysteresis effect in their dominant hand. The differences in hysteresis in the right-handed dominant participant group should be smaller or absent. This should result in a significant three-way interaction of ‘hand’ × ‘order’ × ‘handedness’.
Main effects of ‘hand’ and ‘handedness’ were not significant. Grasp postures did not differ between left- and right-handed dominant participants. There was a significant main effect of ‘order’, F(1,44) = 42.529, p < .001, \(\eta_{p}^{2}\) = 0.492. Participants used a more pronated grasp (+ 5.82°) for the descending than for the ascending sequences (i.e., exhibited a motor hysteresis effect, see Fig. 5 and Fig. S3). The interaction of ‘hand’ × ‘handedness’ was significant, F(1,44) = 5.457, p = .024, \(\eta_{p}^{2}\) = 0.110. Individual rmANOVAs of the left- and right-handed dominant participants revealed no significant main effect of ‘hand’ in the right-handed, but a significant main effect in the left-handed dominant group, F(1,21) = 6.956, p = .015, \(\eta_{p}^{2}\) = 0.249. Left-handed dominant participants used a more pronated grasp (+ 5.36°) in their non-dominant (right) hand (cf. Task 1).

Hand orientation angle α for the dominant and non-dominant hand. Each data point represents the average across the factors ‘drawer’, ‘repetition’, and ‘participant’. Data were separated by ‘handedness’ (gray lines for left-handed, black lines for right-handed dominant) and ‘order’ (filled circles for descending, empty circles for ascending). Error bars indicate 95% within-subject confidence intervals
Most importantly, the interaction of ‘hand’ × ‘order’ × ‘handedness’ was not significant, F(1,44) < 1, p = .350, \(\eta_{p}^{2}\) = 0.020 (see Fig. 5 and Fig. S3). The size of the motor hysteresis effect as a function of ‘hand’ (dominant/non-dominant) was not affected by ‘handedness’ (left-/right-handed dominant). A power analysis was calculated via the SPSS (22, IBM Corp., Armonk, NY) MANOVA procedure (D’Amico et al. 2001). The analysis is based on the number of participants in each group, means and standard deviations of the dependent variables, and correlations between the variables. Means (i.e., effect size) were taken from Schütz and Schack (2013), participant numbers, standard deviations and correlations from the participants in our study. Presuming an effect size of the hemispheric differences (in mechanical and cognitive cost) similar to the effect size of the 2013 study, 46 (24 + 22) participants were sufficient to achieve a power of 0.992 for detecting an interaction of the within-subject factors ‘hand’, ‘order’, and the between-subjects factor ‘handedness’.
If we assumed that only one of the hypotheses held true, the between-subjects factor ‘handedness’ could be removed and all 46 participants be combined into a single group.
If only the hypothesis by Sainburg (2002) held true, we expected a larger mechanical cost and, thus, a smaller hysteresis effect in the non-dominant hand of left- and right-handed dominant participants (see Fig. S1). An rmANOVA was calculated on the hand orientation angles α of task 2 (ordered), with ‘hand’ (dominant/non-dominant) and ‘order’ (a/descending) as within-subject factors. The interaction of ‘hand’ × ‘order’ was not significant, F(1,45) = 1.238, p = .272, \(\eta_{p}^{2}\) = 0.027. Presuming an effect size of the difference in mechanical cost similar to the effect size of the 2013 study, 46 participants were sufficient to achieve a power of 0.992 for detecting an interaction of the within-subject factors ‘hand’ and ‘order’.
If only the hypothesis by Janssen et al. (2009, 2011) held true, we would expect a larger cognitive cost and, thus, a larger hysteresis effect in the left hand of left- and right-handed dominant participants (see Fig. S2). To remove the between-subjects factor ‘handedness’, the factor ‘hand’ was re-encoded from dominant/non-dominant to right/left. A rmANOVA with ‘hand’ (right/left) and ‘order’ (a/descending) as within-subject factors was calculated. The interaction of ‘hand’ × ‘order’ was not significant, F(1,45) < 1, p = .377, \(\eta_{p}^{2}\) = 0.017. Presuming an effect size of the difference in cognitive cost similar to the effect size of the 2013 study, 46 participants were sufficient to achieve a power of 0.904 for detecting an interaction of the within-subject factors ‘hand’ and ‘order’.
Discussion
In the current study, we used the motor hysteresis effect to test for proposed hemispheric differences in cognitive (Janssen et al. 2009, 2011) and mechanical cost (Sainburg 2002). To this end, we designed a sequential reaching task. Left- and right-handed dominant participants executed ordered sequences of trials with their dominant and non-dominant hand, respectively. If both hypotheses held true, we expected a similar hysteresis effect in the left and right hand of right-handed dominant participants, but a differently sized hysteresis effect in left-handed dominant participants. Specifically, hysteresis should be larger in their dominant, left hand. Results showed that the size of the hysteresis effect was the same, irrespective of hand and handedness. This indicates that sequential motor planning is unaffected by hemispheric differences in mechanical or cognitive cost.
In the ordered task, we found a significant hysteresis effect (main effect of ‘order’). Motor plans were partially re-used for the creation of subsequent motor plans. The hysteresis effect was similar in size to previous studies on continuous posture adaptation (Schütz et al. 2011, 2016; Schütz and Schack 2013, 2015). We analyzed whether the size of the present hysteresis effect matched the suggested hemispheric differences in mechanical or cognitive cost. Based on the cost-optimization hypothesis (Schütz et al. 2016), we expected a differently sized hysteresis effect in the left/right hand of left-handed dominant participants if both the hypotheses by Janssen et al. (2009, 2011) and Sainburg (2002) held true.
The size of the hysteresis effect, however, was unaffected by ‘hand’ and ‘handedness’. Both left- and right-handed dominant participants exhibited a similar hysteresis effect in their dominant and non-dominant hand, indicating that not both of the hypotheses held true. To account for the possibility that only one hypothesis held true, we further tested the predictions resulting from a hemispheric difference in only the cognitive cost of motor planning or in only the mechanical cost of motor execution. In these cases, the between-subjects factor ‘handedness’ could be removed and all 46 participants merged into a single, larger group. After a suitable re-encoding of the factor ‘hand’, a single true hypothesis would have resulted in a significant interaction of ‘hand’ × ‘order’. Neither of these interactions was significant, indicating that sequential motor planning was unaffected by hemispheric differences in both cognitive and mechanical cost.
To date, there is conflicting evidence with respect to hemispheric specialization in motor planning: A left-hemispheric specialization is mainly supported by neuroimaging studies (Kim et al. 1993; Haaland and Harrington 1996; Schluter et al. 1998, 2001). In most of these studies, however, participants were right-handed dominant, which resulted in a potential confound of a left-hemispheric specialization and a dominant-hemispheric specialization. Only Kim et al. (1993) tested left- and right-handed dominant participants. In their finger movement task, the right hemisphere was active only during contralateral movements. The left hemisphere was active during contra- and ipsilateral movements, irrespective of participants’ handedness. This finding supports a larger impact of the left hemisphere on motor planning.
In studies on congenital brain damage, participants with left-hemispheric lesions exhibited deficits in grip selection and motor imagery (Mutsaarts et al. 2007; Daprati et al. 2010). Studies further showed that participants with left hemisphere damage have difficulties with anticipatory posture planning, as they do not switch initial grasp types in an end-state comfort task (Crajé et al. 2009, 2010). The only behavioral study that was able to demonstrate a left-hemispheric specialization was done by Janssen et al. (2009, 2011). The authors used an end-state comfort task to show that anticipatory posture planning in a bimanual reach-and-place movement was better in the right hand, irrespective of the participants’ handedness.
Several other behavioral studies were unable to reproduce Janssen’s results: In unimanual reach-and-place tasks, no difference in anticipatory posture planning was found between the left and right hand (Weigelt et al. 2006; Hughes and Franz 2008). In a bimanual reach-and-place task very similar to the experiment by Janssen et al. (2009, 2011), participants had to lift two objects and place them in different end orientations (Hughes et al. 2011). The authors found no difference in anticipatory motor planning between hands. Our findings therefore match the majority of behavioral results: sequential motor planning did not differ between hands, even though a more sensitive (continuous) measure of postural adaptation than in previous studies was applied.
A potential reason why we and others failed to reproduce the results of Janssen et al. (2009; 2011) could be different precision demands: precision demands were high in the study by Janssen et al., but low in all other studies. High precision demands amplify differences between the left and right hand (Annett et al. 1979) and, thus, might have raised the small hemispheric difference in planning above a critical effect size. For our power analyses, we presumed an effect size similar to that of an increase in mechanical cost (Schütz and Schack 2013). If this was the case, we would have had a 90.4% chance of detecting a hemispheric difference in planning. However, if an effect of hemispheric lateralization was present but considerably smaller than presumed, we simply might have missed it.
Reaction times (RT) would be an alternative proxy for the cognitive cost of motor planning: longer RTs are commonly associated with higher planning costs (Spijkers et al. 1997; Diedrichsen et al. 2001, 2003). In a sequential motor task, RT measurements cannot be applied, as they require a stop-and-go signal between trials to start the measurement. A delay between trials, however, affects the hysteresis effect: Jax and Rosenbaum (2007, 2009) demonstrated that hysteresis effects on hand path decay rapidly with increasing delays between trials and were almost eliminated if the delay exceeded 1000 ms. A stop-and-go signal would add at least 1000 ms of delay between trials (the delay added by the announcement of a drawer number between trials is 680 ms; Schütz and Schack 2013) and, thus, would invalidate our general experimental approach.
An interesting finding of the current study was that motor planning was unaffected by hemispheric differences in mechanical cost as well, despite the high power of the analysis (99.2%) and conflicting evidence from a previous study (Schütz and Schack 2013). Hemispheric differences in mechanical cost have been demonstrated in a number of studies (Sainburg and Kalakanis 2000; Bagesteiro and Sainburg 2002; Sainburg 2002). Due to more efficient torque coordination patterns, the dominant limb creates movements with a fraction of the torque impulse required for the same movement by the non-dominant limb (Sainburg 2002; Coelho et al. 2013). In contrast, larger muscle co-activation in the non-dominant limb provides better positional stability at the expense of a larger mechanical cost (Bagesteiro and Sainburg 2003; Sainburg 2014).
A potential shortcoming of all studies in the context of the dynamic-dominance hypothesis (Sainburg 2002) was the use of exclusively right-handed dominant participants. Therefore, all findings might be interpreted as a left hemisphere instead of a dominant hemisphere advantage in muscle torque coordination. If this alternative interpretation was applied to the cost-optimization model (Schütz et al. 2016), a lower mechanical cost in the right hand would counteract a lower cognitive cost (Janssen et al. 2009, 2011) in the right hand of both the left- and the right-handed dominant participants (cf. Figure 1e, f). The model then would predict a similar hysteresis effect, irrespective of hand and handedness, as was found in the current study. To rule out this alternative, a repetition of Sainburg’s experiment (2002) with left-handed dominant participants would be essential.
In both the randomized and the ordered task, we analyzed whether grasp posture varied as a function of hand or handedness. In a randomized task, grasp posture is unaffected by motor hysteresis as each motor plan is created from scratch (Short and Cauraugh 1997; Schütz et al. 2011). To date, not much research has been done on differences in reaching as a function of handedness. In a bimanual reach-and-place task, Hughes et al. (2011) found similar object transport times in the dominant and non-dominant hand of left- and right-handed participants. The similar grasp postures found for left- and right-handed participants in the current sequential reaching task, both in the randomized and ordered condition, thus extend previous findings.
For the right-handed participants, no differences in grasp posture selection between the dominant and non-dominant hand were found. This is in line with literature on reaching movements, which demonstrated hand-specific differences only for movement times (Annett et al. 1979; Roy and Elliott 1989; Carson et al. 1993; Hughes et al. 2011) and movement initiation (Carson et al. 1995). For grasp posture, no differences between hands have been found so far (Hughes and Franz 2008; Herbort and Butz 2011). Schütz et al. (2011) found no differences in hand posture between the left and right hand in a sequential task with continuous posture adaptation, using a group of predominantly right-handed participants. Thus, our current findings corroborate these results.
For the left-handed participants, results showed a difference in grasp posture between the dominant and non-dominant hand: postures in the non-dominant hand were consistently more pronated. As this difference was significant in the randomized and the ordered task, it cannot be considered incidental. One explanation for the more pronated posture in the non-dominant hand might be an influence of the habitual system on grasp selection. Several studies indicate that the visual perception of an object instantly activates cortical representations of suitable motor actions (Grafton et al. 1997; Tucker and Ellis 1998; Grèzes and Decety 2002; Masson et al. 2011) and that for everyday objects people tend to select grasp postures that correspond to the object’s prevailing use (Creem and Proffitt 2001; Herbort and Butz 2011). In continuous tasks, this habitual system has a larger effect on grasp selection than other (e.g., anticipatory) planning systems (Herbort et al. 2017).
Studies on the development of grasp planning showed that, in a reach-and-place task, young children consistently used a pronated hand posture as their default grasp posture for a neutral object (Thibaut and Toussaint 2010; Weigelt and Schack 2010; Stöckel et al. 2012). The use of a supinated posture, on the other hand, had to be learned with rising age. If grasp selection was dominated by the habitual system, pronated grasp postures should be more prominent in the less-frequently used, non-dominant hand, as was found for the left-handed participants in the current study. An open question for further study, however, is why only the grasp postures of the non-dominant hand in left-handed participants were more pronated, whereas postures of the non-dominant hand in right-handed participants were as supinated as those of the dominant hand.
In conclusion, the current study extends previous research on continuous grasp posture selection in a sequential task. It shows that grasp postures are similar irrespective of handedness and hand, with the exception of the non-dominant hand in the left-handed dominant participant group. Sequential motor planning appears unaffected by hemispheric differences in the cognitive cost of motor planning and in the mechanical cost of motor execution. Thus, neither of the two tested hypotheses on hemispheric lateralization can be confirmed in the current study.
References
Annett J, Annett M, Hudson PTW, Turner A (1979) Control of movement in the preferred and non-preferred hands. Q J Exp Psychol 31:641–652
Bagesteiro LB, Sainburg RL (2002) Handedness: dominant arm advantages in control of limb dynamics. J Neurophysiol 88:2408–2421
Bagesteiro LB, Sainburg RL (2003) Nondominant arm advantages in load compensation during rapid elbow joint movements. J Neurophysiol 90:1503–1513
Carson RG, Elliott D, Goodman D, Thyer L, Chua R, Roy EA (1993) The role of impulse variability in manual-aiming asymmetries. Psychol Res 55:291–298
Carson RG, Chua R, Goodman D, Byblow WD, Elliott D (1995) The preparation of aiming movements. Brain Cogn 28:133–154
Coelho CJ, Przybyla A, Yadav V, Sainburg RL (2013) Hemispheric differences in the control of limb dynamics: a link between arm performance asymmetries and arm selection patterns. J Neurophysiol 109:825–838
Crajé C, van der Kamp J, Steenbergen B (2009) Visual information for action planning in left and right congenital hemiparesis. Brain Res 1261:54–64
Crajé C, van Elk M, Beeren M, van Schie HT, Bekkering H, Steenbergen B (2010) Compromised motor planning and motor imagery in right hemiparetic cerebral palsy. Res Dev Disabil 31:1313–1322
Creem SH, Proffitt DR (2001) Grasping objects by their handles: a necessary interaction between cognition and action. J Exp Psychol Hum Percept Perform 27:218–228
D’Amico EJ, Neilands TB, Zambarano R (2001) Power analysis for multivariate and repeated measures designs: a flexible approach using the SPSS MANOVA procedure. Behav Res Methods Instrum Comput 33:479–484. https://doi.org/10.3758/bf03195405
Daprati E, Nico D, Duval S, Lacquaniti F (2010) Different motor imagery modes following brain damage. Cortex 46:1016–1030
Debaere F, Wenderoth N, Sunaert S, Van Hecke P, Swinnen SP (2004) Changes in brain activation during the acquisition of a new bimanual coordination task. Neuropsychologia 42:855–867. https://doi.org/10.1016/j.neuropsychologia.2003.12.010
Diedrichsen J, Hazeltine E, Kennerley S, Ivry RB (2001) Moving to directly cued locations abolishes spatial interference during bimanual actions. Psychol Sci 12:493–498. https://doi.org/10.1111/1467-9280.00391
Diedrichsen J, Ivry RB, Hazeltine E, Kennerley S, Cohen A (2003) Bimanual interference associated with the selection of target locations. J Exp Psychol Hum Percept Perform 29:64–77. https://doi.org/10.1037/0096-1523.29.1.64
Grafton ST, Fadiga L, Arbib MA, Rizzolatti G (1997) Premotor cortex activation during observation and naming of familiar tools. NeuroImage 6:231–236
Grèzes J, Decety J (2002) Does visual perception of object afford action? Evidence from a neuroimaging study. Neuropsychologia 40:212–222
Haaland KY, Harrington DL (1996) Hemispheric asymmetry of movement. Curr Opin Neurobiol 6:796–800
Haslinger B et al (2004) Reduced recruitment of motor association areas during bimanual coordination in concert pianists. Hum Brain Mapp 22:206–215. https://doi.org/10.1002/hbm.20028
Hazeltine E, Ivry R, Grafton ST (1997) Attention and stimulus characteristics determine the locus of motor-sequence encoding. A PET study. Brain 120:123–140. https://doi.org/10.1093/brain/120.1.123
Herbort O, Butz MV (2011) Habitual and goal-directed factors in (everyday) object handling. Exp Brain Res 213:371
Herbort O, Mathew H, Kunde W (2017) Habit outweighs planning in grasp selection for object manipulation. Cogn Psychol 92:127–140
Honda M, Deiber MP, Ibáñez V, Pascual-Leone A, Zhuang P, Hallett M (1998) Dynamic cortical involvement in implicit and explicit motor sequence learning. A PET study. Brain 121:2159–2173. https://doi.org/10.1093/brain/121.11.2159
Hughes CML, Franz EA (2008) Goal-related planning constraints in bimanual grasping and placing of objects. Exp Brain Res 188:541–550
Hughes CML, Reißig P, Seegelke C (2011) Motor planning and execution in left- and right-handed individuals during a bimanual grasping and placing task. Acta Physiol (Oxf) 138:111–118
Hund-Georgiadis M, von Cramon DY (1999) Motor-learning-related changes in piano players and non-musicians revealed by functional magnetic-resonance signals. Exp Brain Res 125:417–425. https://doi.org/10.1007/s002210050698
Iacoboni M, Woods RP, Mazziotta JC (1996) Brain-behavior relationships: evidence from practice effects in spatial stimulus-response compatibility. J Neurophysiol 76:321–331. https://doi.org/10.1152/jn.1996.76.1.321
Jäncke L, Shah NJ, Peters M (2000) Cortical activations in primary and secondary motor areas for complex bimanual movements in professional pianists. Cogn Brain Res 10:177–183. https://doi.org/10.1016/S0926-6410(00)00028-8
Janssen L, Beuting M, Meulenbroek R, Steenbergen B (2009) Combined effects of planning and execution constraints on bimanual task performance. Exp Brain Res 192:61–73
Janssen L, Meulenbroek RGJ, Steenbergen B (2011) Behavioral evidence for left-hemisphere specialization of motor planning. Exp Brain Res 209:65–72. https://doi.org/10.1007/s00221-010-2519-5
Jax SA, Rosenbaum DA (2007) Hand path priming in manual obstacle avoidance: evidence that the dorsal stream does not only control visually guided actions in real time. J Exp Psychol Hum Percept Perform 33:425–441
Jax SA, Rosenbaum DA (2009) Hand path priming in manual obstacle avoidance: rapid decay of dorsal stream information. Neuropsychologia 47:1573–1577
Kelly AMC, Garavan H (2004) Human functional neuroimaging of brain changes associated with practice. Cereb Cortex 15:1089–1102. https://doi.org/10.1093/cercor/bhi005
Kelso JAS, Buchanan JJ, Murata T (1994) Multifunctionality and switching in the coordination dynamics of reaching and grasping. Hum Mov Sci 13:63–94
Kim SG, Ashe J, Hendrich K, Ellermann JM, Merkle H, Ugurbil K, Georgopoulos AP (1993) Functional magnetic resonance imaging of motor cortex: hemispheric asymmetry and handedness. Science 261:615–617
Krings T, Töpper R, Foltys H, Erberich S, Sparing R, Willmes K, Thron A (2000) Cortical activation patterns during complex motor tasks in piano players and control subjects. A functional magnetic resonance imaging study. Neurosci Lett 278:189–193. https://doi.org/10.1016/S0304-3940(99)00930-1
MacNeilage PF, Rogers LJ, Vallortigara G (2009) Origins of the left and right brain. Sci Am 301:60–67
Masson ME, Bub DN, Breuer AT (2011) Priming of reach and grasp actions by handled objects. J Exp Psychol Hum Percept Perform 37:1470–1484
Matsumoto M, Nishimura T (1998) Mersenne twister: a 623-dimensionally equidistributed uniform pseudo-random number generator. ACM Trans Model Comput Simul 8:3–30
Meister I, Krings T, Foltys H, Boroojerdi B, Müller M, Töpper R, Thron A (2005) Effects of long-term practice and task complexity in musicians and nonmusicians performing simple and complex motor tasks: implications for cortical motor organization. Hum Brain Mapp 25:345–352. https://doi.org/10.1002/hbm.20112
Mutsaarts M, Steenbergen B, Bekkering H (2007) Impaired motor imagery in right hemiparetic cerebral palsy. Neuropsychologia 45:853–859
Oldfield RC (1971) The assessment and analysis of handedness: the Edinburgh inventory. Neuropsychologica 9:97–113
Picard N, Matsuzaka Y, Strick PL (2013) Extended practice of a motor skill is associated with reduced metabolic activity in M1. Nat Neurosci 16:1340. https://doi.org/10.1038/nn.3477
Poldrack RA (2000) Imaging brain plasticity: conceptual and methodological issues—a theoretical review. NeuroImage 12:1–13. https://doi.org/10.1006/nimg.2000.0596
Rosenbaum DA, Jorgensen MJ (1992) Planning macroscopic aspects of manual control. Hum Mov Sci 11:61–69
Rosenbaum DA, Cohen RG, Jax SA, Weiss DJ, van der Wel RPRD (2007) The problem of serial order in behavior: Lashley’s legacy. Hum Mov Sci 26:525–554
Roy EA, Elliott D (1989) Manual asymmetries in aimed movements. Q J Exp Psychol Sect A 41:501–516
Sainburg RL (2002) Evidence for a dynamic-dominance hypothesis of handedness. Exp Brain Res 142:241–258
Sainburg RL (2014) Convergent models of handedness and brain lateralization. Front Psychol 5:1092
Sainburg RL, Kalakanis D (2000) Differences in control of limb dynamics during dominant and nondominant arm reaching. J Neurophysiol 83:2661–2675
Schluter ND, Rushworth MF, Passingham RE, Mills KR (1998) Temporary interference in human lateral premotor cortex suggests dominance for the selection of movements. A study using transcranial magnetic stimulation. Brain J Neurol 121:785–799
Schluter ND, Krams M, Rushworth MFS, Passingham RE (2001) Cerebral dominance for action in the human brain: the selection of actions. Neuropsychologia 39:105–113
Schütz C, Schack T (2013) Influence of mechanical load on sequential effects. Exp Brain Res 228:445–455
Schütz C, Schack T (2015) Movement plans for posture selection do not transfer across hands. Front Psychol 6:1358
Schütz C, Weigelt M, Odekerken D, Klein-Soetebier T, Schack T (2011) Motor control strategies in a continuous task space. Mot Control 15:321–341
Schütz C, Weigelt M, Schack T (2016) Cognitive costs of motor planning do not differ between pointing and grasping in a sequential task. Exp Brain Res 234:2035–2043. https://doi.org/10.1007/s00221-016-4608-6
Schütz C, Weigelt M, Schack T (2017) Motor hysteresis in a sequential grasping and pointing task is absent in task-critical joints. Exp Brain Res 235:703–712. https://doi.org/10.1007/s00221-016-4831-1
Short MW, Cauraugh JH (1997) Planning macroscopic aspects of manual control: end-state comfort and point-of-change effects. Acta Physiol (Oxf) 96:133–147
Spijkers W, Heuer H, Kleinsorge T, van der Loo H (1997) Preparation of bimanual movements with same and different amplitudes: specification interference as revealed by reaction time. Acta Physiol (Oxf) 96:207–227. https://doi.org/10.1016/S0001-6918(97)00017-6
Stöckel T, Hughes CL, Schack T (2012) Representation of grasp postures and anticipatory motor planning in children. Psychol Res 76:768–776. https://doi.org/10.1007/s00426-011-0387-7
Thibaut J-P, Toussaint L (2010) Developing motor planning over ages. J Exp Child Psychol 105:116–129
Tucker M, Ellis R (1998) On the relations between seen objects and components of potential actions. J Exp Psychol Hum Percept Perform 24:830–846
Weigelt M, Schack T (2010) The development of end-state comfort planning in preschool children. Exp Psychol 57:476–482
Weigelt M, Kunde W, Prinz W (2006) End-state comfort in bimanual object manipulation. Exp Psychol 53:143–148
Weigelt M, Rosenbaum DA, Hülshorst S, Schack T (2009) Moving and memorizing: motor planning modulates the recency effect in serial and free recall. Acta Physiol (Oxf) 132:68–79
World Medical Association (2013) World Medical Association Declaration of Helsinki: ethical principles for medical research involving human subjects. JAMA 310:2191–2194. https://doi.org/10.1001/jama.2013.281053
Acknowledgements
This work was funded by Grant SCHU 2459/2-1 of the German Research Foundation (DFG) granted to Christoph Schütz.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Schütz, C., Schack, T. Hemispheric lateralization does not affect the cognitive and mechanical cost of a sequential motor task. Exp Brain Res 237, 3133–3142 (2019). https://doi.org/10.1007/s00221-019-05652-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-019-05652-6