
Abstract
An experiment was conducted to contrast the motor performance of three groups (N = 20) of participants: (1) patients with confirmed Parkinson Disease (PD) diagnose; (2) age-matched controls; (3) young adults. The task consisted of scribbling freely for 10 s within circular frames of different sizes. Comparison among groups focused on the relation between the figural elements of the trace (overall size and trace length) and the velocity of the drawing movements. Results were analysed within the framework of previous work on normal individuals showing that instantaneous velocity of drawing movements depends jointly on trace curvature (Two-thirds Power Law) and trace extent (Isochrony principle). The motor behaviour of PD patients exhibited all classical symptoms of the disease (reduced average velocity, reduced fluency, micrographia). At a coarse level of analysis both isochrony and the dependence of velocity on curvature, which are supposed to reflect cortical mechanisms, were spared in PD patients. Instead, significant differences with respects to the control groups emerged from an in-depth analysis of the velocity control suggesting that patients did not scale average velocity as effectively as controls. We factored out velocity control by distinguishing the influence of the broad context in which movement is planned—i.e. the size of the limiting frames—from the influence of the local context—i.e. the linear extent of the unit of motor action being executed. The balance between the two factors was found to be distinctively different in PD patients and controls. This difference is discussed in the light of current theorizing on the role of cortical and sub-cortical mechanisms in the aetiology of PD. We argue that the results are congruent with the notion that cortical mechanisms are responsible for generating a parametric template of the desired movement and the BG specify the actual spatio-temporal parameters through a multiplicative gain factor acting on both size and velocity.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Parkinson’s disease (PD) is one of the most common and disabling neurodegenerative conditions in the general population that affects mainly the motor system. PD results from degenerative processes involving selectively, although not exclusively, the Substantia Nigra pars compacta (SNc). This leads to a progressive loss of the dopaminergic innervations of the striatum in the basal ganglia (BG) and to the cardinal symptoms of PD, which include tremor, rigidity, akinesia, postural abnormalities and gait impairment. In particular, akinesia encompasses a variety of subtle but highly interfering motor disturbances that can be separated into distinct components including delay in movement initiation (true akinesia), slowing of ongoing movements (bradykinesia), reduction of movement amplitude (hypokinesia), fatigue during repetitive movements, paucity of spontaneous movements, and a reduced ability to produce sequences of alternating or complex movements. These distinct yet related aspects of akinesia usually occur in various combinations in individual patients and concur to produce many typical symptoms of PD such as amimia, hypophonia, dysarthria, micrographia, slowness of gait with reduced arm swing, and global immobility.
Motor deficits in PD
PD-related motor deficits have been analysed most extensively in single, goal-directed movements, which exhibit a well-established pattern of abnormalities. First, simple reaction times (RT) are longer in patients than in age-matched controls (Flowers 1975; Bloxham et al. 1984; Sheridan et al. 1987; Flash et al. 1992; Jahanshahi et al. 1992). Second, most patients show bradykinesia in both upper (Hallett and Khoshbin 1980; Ghilardi et al. 2000) and lower limbs (Morris et al. 1994; Morris et al. 2001). It is generally agreed that bradykinesia is caused by the inability to generate the required level of force at the appropriate rate (Godaux et al. 1992; Weiss et al. 1997; Berardelli et al. 2001). It is still debated, however, whether the problem is due to under-scaling of the central motor commands (Berardelli et al. 2001), or inability of the neuromuscular system to adapt quickly to the required force level (Weiss et al. 1997). Third, visual targets are systematically undershot (hypokinesia), with a tendency for the deficit to increase with target distance (Flowers 1975; Vinter and Gras 1998; Desmurget et al. 2003; Desmurget et al. 2004a). Consequently, PD patients also show an abnormally large range effect (Brown et al. 1948). Hypokinesia is most obvious in pointing hand movements and in handwriting (micrographia) (McLennan et al. 1972), but emerges also in gait control. Prompted to increase their walking speed, PD patients increase stepping rhythm much more than stride length (Morris et al. 1994), a poorly effective strategy leading to festination and repeated falls.
The tendency to undershoot visual targets is often associated with, but not a direct consequence of bradykinesia. The ability to estimate visually hand and target position in space appears to be preserved in PD patients (Desmurget et al. 2000, 2004a). The factors most likely responsible for the poor reaching performance in these patients include (1) incorrect timing of the motor commands during ballistic movement (Hallett et al. 1977; Pfann et al. 2001); (2) altered kinaesthetic perception of the initial hand position (Vindras and Viviani 1998); (3) erroneous estimation of movement extent, which may result from a combination of increased reafferent signals and reduced effectiveness of the corollary discharge (Moore 1987, 1989); (4) ineffective use of proprioceptive information, both per se (Schneider et al. 1987; Demirci et al. 1997; Zia et al. 2000) and in conjunction with visual information (Adamovich et al. 2001; Desmurget et al. 2003).
Supplying appropriate visual or acoustic stimuli reduces all motor deficits mentioned above (with the possible exception of the RT increase)—a phenomenon known as paradoxical movement (Georgiou et al. 1993). For instance, PD patients are as fast as age-matched controls when they have to catch a moving ball, but much slower in reaching a stable target (Majsak et al. 1998). Similarly, PD patients exhibit almost normal stride length when the steps are guided by transversal white stripes on the floor, whereas in the absence of visual cues, initiation of gait is delayed leading to short, ineffective steps and freezing episodes (Morris et al. 1994). Several mechanisms have been suggested to explain the beneficial role of these stimuli. They include promoting access to motor programmes (Bloxham et al. 1984), activating cerebellar circuits (Glickstein and Stein 1991), and boosting the activation of the medial cortical area by BG (Berardelli et al. 2001).
What do PD symptoms tell about movement control?
The neurophysiological bases of PD and the associated motor symptoms strongly suggest that BG play an important role in the normal control of amplitude and velocity of voluntary movements. Neurophysiological (Turner and Anderson 1997) and brain imaging studies (Turner et al. 1998; Desmurget et al. 2004b) provide additional evidence along the same line. However, the specific contribution of the BG in normal individuals is still open to debate. At present, at least two views are being contrasted, which postulate a “scaling” (Wichmann and DeLong 1996), and a “focussing” (Mink 1996) role for BG, respectively. Both models agree that the cause of PD is the loss of neurones in the SNc, and the consequent reduction of dopaminergic drive to the striatum. The decrease has opposite consequences on the direct and indirect pathways from the striatum to the output nuclei of the BG, namely the Globus Pallidus internal segment (Gpi) and the Substantia Nigra pars reticulata (SNr). The activity in the direct inhibitory pathway is reduced, whereas the activity in the indirect excitatory pathway through the Globus Pallidus external segment (GPe) and the subthalamic nucleus is increased. The two models diverge instead as far as the function of the neurons targeted by direct and indirect pathways to GPi and SNr neurons is concerned.
According to the “scaling” model, direct and indirect pathways are activated sequentially. First, by inhibiting the GPi/SNr the direct pathway would decrease their inhibitory output and, therefore, facilitate movement. The indirect pathway would be activated after a delay to terminate the ongoing movement. Specifically, the activation would relive inhibition of GPi/SNr and therefore increase the inhibition of the thalamic and brainstem neurones onto which GPi/SNr project. According to this model, the BG would play both a gating role by sharpening onset and offset phases of the movement, and a scaling role by modulating force.
The second (“focussing”) model holds instead that both direct and indirect pathways projecting on GPi/SNr neurones would simultaneously disinhibit the target motor centres and, at the same time, inhibit competing motor mechanism that would otherwise interfere with the desired movement. Thus, PD would prevent both the removal of inhibition from the desired motor pattern generator and the inhibition of the competing patterns.
In addition, it has been suggested that BG contribute to movement execution by modulating the spinal reflex circuits via their descending output to the brainstem (Johnson et al. 1991; Baldissera et al. 1994; Munro-Davies et al. 1999; Braak et al. 2000; Delwaide et al. 2000; Meunier et al. 2000).
It is still unclear whether PD-related motor deficits reflect a difficulty in the planning phase, associated with cortical dysfunction (Schwab et al. 1954; Marsden 1982; Berardelli et al. 2001; Desmurget et al. 2004b), or arise at the level of movement execution (Weiss et al. 1997), possibly because of associated brainstem disorders (Delwaide et al. 2000; Meunier et al. 2000; Pahapill and Lozano 2000; Simonetta-Moreau et al. 2002; Braak et al. 2003). Most arguments in support of one view or the other have been countered by different arguments. In favour of the planning hypothesis, the fact has been cited that PD patients engaged in a tracking task cannot take advantage of the predictive nature of the target as normal individuals do (Flowers 1978a, b). However, subsequent studies (Bloxham et al. 1984; Day et al. 1984; Schnider et al. 1995) have shown that the deficit is not always present. Moreover, PD patients are able to increase movement velocity with target distance (Berardelli et al. 1986a, 1986b; see, however, Draper and Johns 1964; Flowers 1976; Warabi et al. 1986; Pfann et al. 2001), and comply with time constraints (Teasdale et al. 1990; Pfann et al. 2001). Finally, the directional modulation of kinematic parameters associated with the anisotropy of arm inertia is similar in healthy subjects and PD patients (Gordon et al. 1994b; Ghilardi et al. 2000), suggesting a preserved ability to control independently movement direction and amplitude.
The fact that RTs are longer in PD patients than in controls might signal a delayed activation of the required motor programs. However, this inference is also controversial because the difference between choice and simple RTs is similar in both populations (Evarts et al. 1981). In fact, a slow build-up of motor excitability might well be responsible for increasing the response delay (Pascual-Leone et al. 1994; Berardelli et al. 2001).
Performing simultaneous movements is close to impossible for PD patients (Benecke et al. 1986; Benecke et al. 1987; Castiello and Bennett 1997; see, however, Brown and Jahanshahi 1998), which certainly points to a limited planning capacity. Yet this limitation may also arise because attempts to compensate BG deficiencies by vicarious cortical processes tax too much the computational resources of the system (Berardelli et al. 2001).
Finally, the fact that PD patients tend to make frequent, long pauses in tasks such as drawing geometrical figures (Berardelli et al. 1986a, 1986b), pointing to visual targets (Weiss et al. 1997), and making alternating hand movements has often been ascribed to a planning deficit (Harrington and Haaland 1991), or to the inability to switch from one motor program to another (Benecke et al. 1987). However, even in this case the argument is not watertight because a problem with the implementation stage (e.g. the inability to switch rapidly between different force levels) may lead to very similar deficits (Berardelli et al. 1986a, 1986b; Weiss et al. 1997).
Very recently, Mazzoni et al. (2007) have suggested yet another interpretation of the generalized movement slowing induced by PD. By focussing on reaching movements, these authors have argued that bradykinesia is not the consequence of an impaired speed-accuracy trade-off because, with adequate training, patients can perform as accurately and as fast as control. Rather, PD would alter the balance between the perceived reward of arriving to the target quickly and the amount of energy or effort required to achieve the fast movement. In other words, fast and accurate movements are within the available choices for patients, but the disease makes their selection less likely because they are perceived as more costly energetically by patients than by controls. In line with this interpretation, the authors also suggest that striatal dopamine exerts an “energizing” action on a “motor motivational” system that governs automatic and spontaneous behaviour.
Insofar as it is generally agreed that the relation between movement extent and duration pertains more directly to the planning phase of the movement, an in-depth comparative analysis of this relation may afford a new window on the nature of the PD-related motor deficits and contribute to the planning versus execution debate evoked above. The next section provides the background and the rationale for our specific approach to such a comparative analysis.
Isochrony
Previous works demonstrated that instantaneous movement velocity depends jointly on the curvature of the trajectory—via the so-called Two-thirds Power Law (Viviani and Terzuolo 1982; Lacquaniti et al. 1983)—and on the metric properties of the trajectory—via the so-called Isochrony Principle (Viviani and Terzuolo 1980; Viviani and McCollum 1983; Viviani and Zanone 1988; Viviani and Schneider 1991). Whereas the Two-thirds Power Law describes the local, instantaneous variations of velocity, the principle of isochrony refers to a global regularity present in many end-point movements (Lacquaniti et al. 1984), most clearly in drawing and writing gestures. The principle states that the average velocity with which the gesture is executed increases spontaneously as a function of its size, so that execution time is less dependent on size than it would be otherwise. Moreover, it has been shown (Ostry et al. 1987) that the shape of the velocity curve remains almost invariant across changes in movement duration. This general statement, however, needs to be qualified according to the type of movement involved.
For simple point-to-point (not necessarily straight) movements, a power function Vm = K × Lα describes accurately the relation between the average velocity from onset to end (Vm) and the linear extent (L) of the trajectory (Freeman 1914; Michel 1971; Viviani and Terzuolo 1983; Viviani and McCollum 1983; Lacquaniti et al. 1984). Experimental estimates of the exponent α range between 0.80 and 1.00 indicating a very high degree of velocity compensation. For more complex movements that can be construed as a sequence of simpler units the principle applies both globally and piece-wise. For instance, in the case of cursive handwriting the average tracing velocity of each letter depends on the relative size of the letter, as well as on the size of the entire word (Lacquaniti et al. 1984). When the movement is periodic, i.e. when the same closed pattern is traced repeatedly, the average velocity covaries with the linear extent of the trajectory over one movement cycle (Viviani and McCollum 1983). Whenever the pattern can be decomposed into identifiable figural units, the isochrony equation for cyclic movements takes a more complex form. For instance, if one draws continuously a knotted double ellipse the average velocity within each ellipse is a function of both its own perimeter and of the sum of the two perimeters (Viviani and Cenzato 1985).
The findings summarized above suggest that the mechanism underlying isochrony has access to an internal representation of the motor plan that includes at least an estimate of the linear extent of the to-be-executed trajectory. Moreover, whenever the gesture involves a sequence of constituent units of motor action, it must be assumed that the linear extent of each unit is equally available. Clearly, this does not imply that the linear extent is an explicit parameter of the motor plan (Viviani and Flash 1995). In fact it says little about the nature of the motor representation other than the control of velocity draws from some sort of knowledge about the length of the trajectory before it is executed. This logical inference seems to be challenged by the observation that a form of isochrony is present even when we scribble (Viviani 1986). By definition, no advance plan is available for these extemporaneous movements that can continue indefinitely. Insofar as the notion of total linear extent of the trajectory becomes meaningless for scribbles, any regularity emerging at the global level in the control of velocity either reflects an underlying regularity at the local level, i.e. at the level of the units of motor action that are planned and executed sequentially while we scribble, or implies the existence of a more global control parameter. It is not known which one of these two hypotheses accounts best for the observed behaviour. In either case, isochrony in scribbles would still emerge from the planning phase. However, insofar as the BG have been credited with a role in taking into account the context in which the movement is executed (Houk and Wise 1995), and in controlling its scale (Turner et al. 1998), evidence that scribbling velocity depends in a lawful manner on some global size parameter of the movement would invite the inference that processes beyond the motor cortex are involved in this form of isochrony. Because BG functions are certainly impaired by PD, contrasting how velocity in PD patients and normal individuals is controlled, both locally and globally, when a complete plan of the movement is not available in advance should be interesting on two counts. It may contribute to the planning versus execution debate on the origin of PD-related motor deficits. Moreover, the pattern of differences in the two populations should be conducive to clarify the more general issue of how cortical and BG mechanisms cooperate to control simultaneously direction, extent and velocity of hand movements. The aim of our study is to provide such a comparative study based on a relatively large population of participants.
Methods
Experimental population
Three groups of individuals (N = 20) participated to the experiment. The first group (PK) included PD patients (13 males, 7 females) selected among those reporting at the Department of Neurology of the Geneva University Hospitals. All but one patient were right-handed. All patients had typical, asymmetric, levodopa-responsive PD, according to the United Kingdom PD Society Brain Bank criteria. At the time of testing, patients were being treated with individualized regimens of standard and slow-release levodopa/carbidopa or levodopa/benserazide, COMT inhibitors, dopamine agonists and amantadine. Disease severity ranged from Hoehn & Yahr stage 1.5–3 (Hoehn and Yahr 1967). The second group (Age-Matched Controls; AMC) included individuals (14 males, 6 females, all right-handed) with no known neurological disorder. Table 1 reports detailed personal data for these two groups. Statistical analysis (t test) showed no significant age difference between the groups (PK: mean = 68.3, SD = 8.0; AMC: mean = 66.9, SD = 6.8) that were tested at the Department of Psychology of the University of Geneva. The third group (Young Controls: YC) included students (7 males, 13 females, all right-handed) of the Faculty of Psychology of UHSR University whose age ranged between 21 and 28 years. They were tested at Laboratory of Action, Perception and Cognition of the UHSR Faculty of Psychology in Milan. An appropriate weighting of the individual variances was applied in statistical analyses to correct for sex ratio unbalances. All groups participated on a voluntary basis and each individual gave a written informed consent. The experimental procedure was approved by the Ethical Committees of the Geneva University Hospitals and of the UHSR University.
Apparatus and task
Scribbling movements were recorded with two similar digitising tables (in Geneva: Model #2200-2436, Numonics; size: 110 × 80 cm, resolution: 0.0025 cm, sampling rate: 200 samples/s; in Milan: Model #9240, CalComp; size: 61 × 61 cm, resolution: 0.0025 cm, sampling rate: 200 samples/s) placed horizontally in front of the seating participant. The chair height was adjusted individually to maximize comfort. The writing implement resembled an ordinary ballpoint pen. The position of the pen’s tip was sampled continuously as long as the tip was within a proximity margin of 13 mm. The experimenter placed successively at the centre of the workspace ten sheets of paper on which were printed circular frames of different sizes. The areas of the circles increased in a logarithmic progression from π cm2 (radius = 1 cm) to 81π cm2 (radius = 9 cm). A different pseudo-random order of presentation was selected for each participant. Sequences complied with two constraints: (1) the first item should be neither the smallest, nor the largest circle; (2) the difference in rank order between successive items should be >2.
The task was to draw a continuous smooth scribble inside each frame with the dominant hand. We instructed participants to make their drawings as meaningless as possible and to avoid repeating regular patterns. We also encouraged participants to avoid cusps in the trajectories. The movement was prompted by a “Go” verbal instruction, and went on until a “Stop” instruction. The recording lasted 10 s (2,000 samples). To eliminate the initial transient phase, the recording started a few seconds after the movement had actually begun. The entire experiment lasted about 15 min. Participants were free to choose the velocity at which the drawing was to be executed. As a consequence, average velocity varied substantially across individuals. In a few cases, participants inadvertently crossed the border of the limiting frame. These trials were repeated immediately. The experimenter paced the task by positioning the sheets with the traces. On average, there were 30 s between successive trials. At the beginning of the session, the task was introduced verbally by the experimenter who also demonstrated the functioning of the recording table. The actual recording session was preceded by few warm-up trials to familiarize the participants with the task and the material.
Groups PK and AMC repeated the task twice, in successive sessions, which also included two additional motor tasks (the results of which are not presented here). In session 1, which lasted about 75 min, PD patients were tested before taking their usual morning dose of levodopa and most, but not all, were in a variably severe OFF state corresponding to impaired motor function and obvious parkinsonism. First, they underwent a neuropsychological screening (see later). Then, they performed the three motor tasks. AMC participants followed the same routine. In session 2, PD patients were tested at least 90 min after taking their usual morning dose of levodopa (ON state). Clinical conditions in ON and OFF states were assessed by the Unified PD Rating Scale (UPDRS), part III (motor part, 27 items for a total score of 108 points) and the Purdue pegboard test with the left, right, and both hands. For patients the second session was an exact repeat of the first one. AMC participants also repeated the three motor tasks, but skipped the second neuropsychological screening. The two sessions were separated by a 30-min rest period. The notation PK1, PK2, AMC1, and AMC2 is used to indicate the results from the two sessions. The group of young controls (YC) performed the task only once and did not undergo a neuropsychological screening.
Neuropsychological test of the participants in groups PK and AMC
The neuropsychological screening was conducted by one of us (S.C.C.). It included a Stroop test and a test of verbal fluency. Tables 1 and 2 summarize the results of the screening, as well as the UPDRS III scores and pegboard test results. The scores of the two groups in the Stroop test were similar (coloured points: PK = 17.03 s, AMC = 13.52 s; words: PK = 21.17 s; AMC = 19.46 s; coloured words: PK = 33.91 s; AMC = 32.05 s; errors with coloured words: PK = 1.89; AMC = 1.27). The only significant difference was the time for completing the coloured points test (F(1,40) = 5.60, P = 0.0230). Individual scores for the fluency test were ipsitized using the reference values for age, sex and education degree reported by Cardebat et al. (1990). Statistical analysis revealed no significant difference between groups (PK = −0.47; AMC = −0.05; F(1,40) = 1.52, P = 0.22). By contrast, the Purdue pegboard test scores, that correlate with dopaminergic deficit in the nigro-striatal system (Vingerhoets et al. 1997), were significantly different in the two groups (right hand: PK = 9.25; AMC = 13.10; F(1,40) = 35.22, P < 0.0001; left hand: PK = 9.10; AMC = 12.05; F(1,40) = 42.36, P < 0.0001; both hands: PK = 6.15; AMC = 9.05; F(1,40) = 31.91, P < 0.0001). The UPDRS scores clearly discriminated the age-matched controls from the patients in both ON and OFF states (AMC: range = 0–5.5; mean = 2.7. PK-OFF state: range = 7–43.5; mean = 23.1; PK-ON state: range = 5–37; mean = 17.8). The difference between scores in ON and OFF states was highly significant (F(1,40) = 86.14, P < 0.0001). However, the reduction of the UPDRS scores in the ON state varied considerably among patients (range 3–64%). The sub-scores of the UPDRS indicated in Table 2 also differed between groups PK and AMC. Axial bradykinesia was computed according to Stebbins and Goetz (1998) as the sum of items 18 (speech), 19 (facial expression) and 27–31 (arise from chair, posture, gait, postural stability, body bradykinesia). Right bradykinesia was the sum of items 23r, 24r, 25r, and 26r (finger taps, hand grip, hand pronate/supinate and leg agility). Rigidity, rest tremor and action tremor were computed from items 22, 20 and 21, respectively. In all cases, except for rest tremor (PK = 1.01; AMC = 0.00; F(1,40) = 6.03, P = 0.0185) and action tremor (PK = 0.75; AMC = 0.05; F(1,40) = 4.17, P = 0.0477), differences were highly significant, at the 0.0001 level.
Data processing
The data from each trial (2,000 pairs of coordinates of the point-samples) were processed off-line. The parameters selected for characterizing the scribbling movements were: (1) the instantaneous tangential velocity V(t); (2) the number of inflections in the trace Nf; (3) the length Lseg of the segments of trajectory bounded by successive inflection points; (4) the normalized radius of curvature of the trace \( R^{{*{1 \mathord{\left/ {\vphantom {1 3}} \right. \kern-\nulldelimiterspace} 3}}} ; \) (5) the average curvature of the trace Cm; (6) the average velocity gain factor over the entire trace (Km) and over successive segments (Kseg). Appendix 1 provides a detailed definition of these parameters and a description of the data processing for their estimation.
Results
All participants found the experimental task easy to understand and to execute. In young participants, very few trials had to be repeated, either because the trace had crossed the circular frame, or because the smoothness condition (i.e. no cusps in the trajectory) had been violated. The number of repeated trials (mostly because of border crossings) was somewhat higher for both age-matched controls and PD patients. The database for each group and session (YC, AMC1, AMC2, PK1, PK2) was a set of 20 (subjects) × 10 (trials) = 200 records. Figure 1 shows the complete set of traces produced by a typical young control. Figure 2 shows the corresponding results for one patient. This figure exemplifies the typical behaviour of PD patients in the OFF state, namely slower, more hesitating movements with a higher number of small direction changes. Signs of micrographia and stereotyped, repetitive patterns were also common in the traces of patients in both ON and OFF states.

Scribbling movements. A complete series of recordings in one representative young control. The radius of the circular frames increased logarithmically from 1 to 9 cm. During the experiment only one frame at the time was presented on the recording tablet. The sequence with which different sizes were presented was varied randomly for each participant

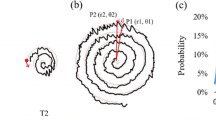
Scribbling movements. A complete series of recordings in one representative PD patient in the OFF state. Traces in patients were far less fluent than in controls
Figural self-similarity
After scaling the traces to the same size, visual inspection of individual performances suggested that the shape of the movements was fairly invariant across frame sizes (self-similarity). As shown for one typical individual in group YC (upper panels in Fig. 3), and session 2 of group PK (upper panels in Fig. 4) there was no obvious figural clue to tell which drawing was made within the largest or the smallest frame. Individual differences in young and age-matched controls were also small. This is exemplified by the traces in the lower panels of Fig. 3 generated by two young participants within the same frame. The lower panels in Fig. 4 illustrate the inter-individual similarity observed in the PK group (see, however, above). Figural self-similarity across sizes was assessed quantitatively in two ways.

Figural similarity. Top traces example in one representative young control (JA) of the self-similarity of traces at the extremes of the size range. For clarity, the two frames have been scaled to the same size. Bottom traces: scribbles from two young controls (CA and EL) illustrate the range of inter-individual variability in normal participants

Figural similarity. Top traces example in one representative patient (CI) of the self-similarity of traces at the extremes of the size range. For clarity, the two frames have been scaled to the same size. Bottom traces scribbles from two patients in the OFF state (PE and OL) illustrate the range of inter-individual variability in patients
First, we explored how the number of inflections Nf varied as a function of frame size. Because movements were constrained by a frame, this parameter depends on the general shape of the scribbles. Few inflections imply the presence of many loops in the trace, whereas a high number of inflections suggest that the trajectory was wavy and sinuous. A preliminary analysis of the data showed that all movement parameters varied approximately as a power function Y = K × Aγ of the area A of the frame. Thus, for this and all subsequent analyses we estimated the parameters K and γ by computing the linear regression log(Y) = a + b log(A) and setting K = ea, γ = b. The average and between-participant variability of Nf was considerably higher in AMC and PK groups than in group YC. Yet, for all groups the power function approximation predicted well the dependence of Nf on the frame area (YC: Nf = 23.742 A−0.069; AMC1: Nf = 47.790 A−0.120; AMC2: Nf = 48.671 A−0.130; PK1: Nf = 48.200 A−0.149; PK2: Nf = 37.863 A−0.149). In all cases the exponent of the power law was small, indicating that the number of inflections was weakly dependent on movement size.
The second figural index for assessing self-similarity was the average curvature of the traces Cm computed with the re-sampling technique detailed in Appendix 1. Figure 5 shows for each group the relation between log(Cm) and log(A) (Cm values averaged over participants). The excellent fit of the linear regression demonstrates that also in this case a power function predicts accurately the average curvature for each frame size (YC: Cm = 4.299 A−0.471; AMC1: Cm = 5.833 A−0.474; AMC2: Cm = 6.065 A−0.479; PK1: Cm = 10.018 A−0.476; PK2: Cm = 9.757 A−0.483). Cm can also be expressed as a power function of the (constant) curvature of the frame (Cf) by using the relation A = πC −2f (YC: Cm = 2.507 C 0.942f ; AMC1: Cm = 3.390 C 0.948;f AMC2: Cm = 3.505 C 0.958f ; PK1: Cm = 5.809 C 0.952;f PK2: Cm = 5.613 C 0.966f ). The average curvature was significantly different among groups, young subjects and PD patients producing the lowest and highest curvature, respectively. However, the fact that the exponent of the (Cm − Cf) relationship was always close to 1 demonstrates that all participants spontaneously scaled almost linearly the average curvature of their movements to the curvature of the frame. Insofar as the curvature is concerned, scribbles of different dimensions were just scaled versions of an idiosyncratic basic pattern. Across participants, the variability of Cm (estimated by the 95% confidence intervals around the means) was surprisingly small for the group YC, and moderate for the other groups, indicating a reasonable degree of homogeneity of the individual performances. Similar results were also observed for Nf. Thus, we felt confident that the group results to be presented in the next sections capture some common features of the motor behaviour under study.

Relation between the logarithm of frame area and the logarithm of the average curvature for the three groups of participants. For groups AMC and PK the results of the two sessions are shown separately. Data points are averages over all participants. Bars encompass ± 1 SD. In all cases a linear regression fits very accurately the data points. The parameters of the power law corresponding to the fit in linear scales are indicated inset. Note that only the coefficient, but not the exponent of the power law differs significantly among groups
Scribble comply with the Two-third Power Law
The velocity of end-point voluntary movements is modulated both globally, by setting the average velocity for the entire gesture, and locally, by the geometrical properties of the trajectory (see “Introduction”). The emphasis in this study is on the former type of control. However, the two modulations are intertwined. To isolate the control component acting on average velocity, the first preliminary step was to verify in both patients and controls that the Two-Third Power Law V(t) = K[R(t)/(1 + αR(t))](1−β) applies also to scribbling movements. The law states that movement velocity is the product of a velocity gain factor K, which sets the average velocity, and of a time-varying term describing the instantaneous modulation that depends on the radius of curvature of the trajectory R(t). The parameter α in the equation above has a technical role. Its introduction was suggested by Viviani and Stucchi (1992) to generalize the original formulation of the Power Law V(t) = K × R(t)1−β also to trajectories with points of inflection where the radius of curvature has a singularity. Instead, the expression R*(t) = [R(t)/(1 + αR(t))] stays finite for every value of R(t). Viviani and Stucchi (1992) showed that law is most accurate when the parameter α is allowed to depend on the average velocity Vm. To assess the validity of the law, we considered α, β, and K in the equation above as free parameters. Using a Simplex algorithm, we estimated for each trial the values of the parameters that minimize the mean square difference between actual and predicted velocities. Figure 6 illustrates with an example from a young control the regression between log V(t) and log([R(t)/(1 + αR(t))]) after inserting the optimal value of α. In this diagram the slope of the regression line estimates β and the intercept at the origin estimates log(K).

Scribbles comply with the Two-thirds Power Law. Data from one representative participant (group YC) and for the indicated frame size. Scatter diagram (2,000 points) between the logarithm of the instantaneous velocity (V ordinate) and the logarithm of the generalized radius of curvature (R abscissa). A linear regression fits very accurately the data points. The parameters of the power law corresponding to the fit in linear scales are indicated inset. Note that the exponent 1 − β of the power law is quite close to the theoretical value 1/3
As expected, the optimal estimate of α varied as a function of frame size (ANOVA, YC: F(9,171) = 38.57, P < 0.001; AMC1: F(9,171) = 41.91, P < 0.001); AMC2: F(9,171) = 22.40, P < 0.001; PK1: F(9,171) = 18.94, P < 0.001; PK2: F(9,171) = 55.37, P < 0.001). In addition, there were significant differences among participants (ANOVA, YC: F(19,171) = 5.31, P < 0.001; AMC1: F(19,171) = 11.65, P < 0.001; AMC2: F(19,171) = 6.60, P < 0.001; PK1: F(19,171) = 8.81, P < 0.001; PK2: F(19,171) = 10.32, P < 0.001). For all trials and all participants in each group the logarithms of optimal α-values were linearly regressed against the logarithms of the corresponding average velocities (we excluded from the analysis a few trials in which α > 2.5 because inspection of the data showed that the corresponding movements were abnormally slow). In spite of individual differences (see above), the power function approximation that in linear scales corresponds to the logarithmic regression was remarkably similar for all groups (YC: α = 6.315 V −1.007m ; AMC1: α = 8.793 V −1.038m ; AMC2: α = 8.602 V −1.046m ; PK1: α = 5.403 V −1.027m ; PK2: α = 6.539 V −1.061m ). In fact, the values of α averaged over frame size (YC: 0.796; AMC1: 0.904; AMC2: 0.910; PK1: 1.001; PK2: 0.975) were not significantly different across groups [one-way ANOVA, F(4,95) = 0.589, P = 0.671]. The introduction of this parameter was instrumental to keep the Power Law well behaved near the points of inflection. Also, letting it vary across frame sizes and groups improved the fit of the Power Law. However, keeping it constant for all trials in all participants would not have obscured the significant modulation of the velocity gain among groups (see below).
As for the exponent β, there was a slight albeit systematic non-linear effect of the frame size (ANOVA, YC: F(9,171) = 28.60; P < 0.001; AMC1: F(9,171) = 15.68, P < 0.001; AMC2: F(9,171) = 21.72, P < 0.001; PK1: F(9,171) = 6.69, P < 0.001; PK2: F(9,171) = 16.54, P < 0.001), as well as significant individual differences (ANOVA, YC: F(19,171) = 4.65, P < 0.001; AMC1: F(19,171) = 8.70, P < 0.001; AMC2: F(19,171) = 10.81, P < 0.001; PK1: F(19,171) = 5.98, P < 0.001; PK2: F(19,171) = 6.54, P < 0.001). However, the exponent of the Two-third Power Law was virtually indistinguishable across groups [YC: 1 − β = 0.3526; AMC1: 1 − β = 0.3572; AMC2: 1 − β = 0.3576; PK1: 1 − β = 0.3527; PK2: 1 − β = 0.3552; ANOVA, F(4,95) = 1.101, P = 0.361], and very close to the theoretical value β = 2/3. More importantly, for all groups the variability was no more than 3% of the corresponding average. Finally, significant differences among groups emerged in the least-square estimate of the velocity gain factor K (YC: K = 13.723; AMC1: K = 16.724; AMC2: K = 16.632; PK1: K = 12.089; PK2: K = 12.809; ANOVA, F(4,95) = 4.821, P = 0.001). These differences will be analysed further in the next section. The accuracy with which the Two-thirds Power Law accounted for the data was estimated by regressing observed against predicted velocity. The coefficient of linear correlation was uniformly high for all trials (YC: r = 0.671 ± 0.107; AMC1: r = 0.674 ± 0.080; AMC2: r = 0.672 ± 0.078; PK1: r = 0.703 ± 0.086; PK2: r = 0.695 ± 0.085). Figure 7 illustrates these regressions with one example from groups YC, AMC1, and PK1.

Scribbles comply with the Two-thirds Power Law. Data from one representative participant for each group and for the indicated frame sizes. Scatter diagram (2,000 points) between the observed instantaneous velocity (ordinates) and the instantaneous velocity predicted by the Two-thirds Power Law (abscissas). In all cases a linear regression with a slope very close to 1 fits very accurately the data points. The parameters of the power law corresponding used to compute the predicted velocity are indicated inset. Note that the exponents 1 − β of the power law are all close to the theoretical value 1/3
In summary, even for highly variable and extemporaneous scribbling movements, the instantaneous velocity is related to the corresponding value of the radius of curvature as prescribed by the Two-thirds Power Law. PD patients (group PK1 and PK2) had a consistently lower gain than both age-matched and young controls, but the relational constraint described by the law appears to be robust against age and clinical conditions. This result provides the basis for the timing analysis to be presented next.
Global isochrony
For point-to-point movements the phenomenon of isochrony manifests itself as a compensatory increase of the average velocity with the length of the trajectory to be executed. In the case of scribbles whose trajectory is not defined in advance we have to envisage the possibility that the role of path length for velocity scaling is taken by a more general figural parameter that can be represented centrally. We investigated the hypothesis that the frame surface is such a parameter by testing whether the surface permits one to predict reliably the average velocity Vm. As before, the test involved computing the linear regression between log(A) and log(Vm). Figure 8 shows the results for all experimental groups. The coefficient of linear correlation for each data set was very high (see inset). Thus, the power functions approximations derived from the regression (YC: Vm = 3.028 A0.389; AMC1: Vm = 3.416 A0.382; AMC2: Vm = 3.192 A0.386; PK1: Vm = 2.213 A0.372; PK2: Vm = 2.350 A0.388) are quite accurate. The multiplicative coefficients in these approximations reflect faithfully the differences among the group estimates of the velocity gain factor K in the Two-thirds Power Law (see previous section). By contrast, the exponents were almost identical across groups.

Global isochrony. Relation between the logarithm of the frame area (abscissas) and the logarithm of the average velocity. For groups AMC and PK the results of the two sessions are shown separately. Data points are averages over all participants within a group. Bars encompass ± 1 SD. In all cases a linear regression fits very accurately the data points. The parameters of the power law corresponding to the fit in linear scales are indicated inset. Note that the exponent of the power law is similar for all groups. Averaged over trials and frame sizes, the velocity was YC: 12.84 cm/s; AMC1: 14.08 cm/s; AMC2: 13.37 cm/s; PK1: 8.76 cm/s; PK2: 9.92 cm/s
The same analysis was also carried out for each participant separately. The results demonstrated that the velocity compensation emerging at the group level was in fact present in each individual performance. The multiplicative velocity gain factor was somewhat variable across individuals because each of them selected a different overall tempo for the task. There were small variations also in the exponent of the power function, suggesting that the degree of velocity compensation was not uniform within the population. However, the standard deviation of the exponent was far smaller than that of the multiplicative factor. In other words, individual linear regressions were almost parallel to each other. More importantly, the standard deviation of the coefficient of correlation was quite small, and the average of the individual correlations was not much lower than the correlation for the group data. Clearly, the high regularity of the results in Fig. 8 is not an artifactual consequence of pooling individual data. In summary, the analysis confirmed the hypothesis that the area of the frame affords a stable figural parameter that participants used to modulate the base rhythm in an (unconscious) effort to increase the velocity pari passu with the overall size of the movement. In particular, with respect to PD patients, these results suggest that the disease does not affect the mechanisms that modulate globally the velocity as a function of the available workspace. Next, we turn to the issue of whether this velocity compensation mechanism can be factored out in a manner similar to that demonstrated for closed, regular trajectories.
Decomposing the velocity compensation mechanism
By integrating the two sides of the Two-Thirds Power Law one gets
showing that the average velocity can be decomposed in two multiplicative factors. In the case of closed regular trajectories, the increase of the average velocity with increasing size of the figure was found to result from the contributions of both factors. On the one side, the velocity gain factor K increases with trace length, which scales linearly with figure size. On the other side, increasing the size shifts upward the range of values of the radius of curvature, and, therefore, increases the value of the time average <R*1/3(t)>. In past work (see “Introduction”) we argued that the contribution of the factor K reflects compensatory mechanisms acting at the motor planning stage, whereas the contribution of the radius of curvature emerges at the implementation stage. Thus, we reserved the term “Isochrony” to describe only the effect of the gain factor K on average velocity. Here we verified that the distinction suggested by the analysis of closed regular trajectories remained valid also in the case of scribbles. Because the average curvature of the traces was inversely related to the frame area (see Fig. 5), the time average <R*1/3(t)> is an equally regular increasing function of the frame area (recall that the curvature is the inverse of the radius). It follows that, even in scribbles, the factor <R*1/3(t)> contributes to the increase of average velocity with frame area. To demonstrate that the factor K also provides its own distinct contribution, for each trial we computed directly the average velocity gain factor Km by integrating the expression V(t)/[(1 + αR(t))/R(t)]1/3 over the recording interval [0 − T]. Then, we regressed the mean Km across participants against the area A, after applying the usual logarithmic transformation of the variables. The results for all groups are illustrated in Fig. 9, which reports the coefficients of the best-fitting power function interpolation to the data points: [YC: Km = 5.693 A0.236; AMC1: Km = 7.711 A0.205; AMC2: Km = 7.450 A0.205; PK1: Km = 6.309 A0.186; PK2: Km = 6.455 A0.198]. In all cases, the accuracy of the interpolation was excellent and the exponents of the power law were similar. Moreover, although we considered frame area rather than path length as a control variable, the results are dimensionally congruent with those reported previously for closed, periodic movements. For instance, in the case of ellipses (Lacquaniti et al. 1984), the relation between velocity gain factor Km and perimeter P is well approximated by K = K0 × P0.45. For eccentricities up to 0.9 the perimeter of the ellipse is almost proportional to the square root of its area. Thus, this relation can also be written as K = K0 × A0.225, where the value of the exponent is in excellent agreement with the values estimated above. The agreement supports the suggestion made above that the role of the control variable in scribbling is taken by the total surface within which the movement is constrained. If so, the expression Km = K0 × Aε would capture the isochronic component of the velocity modulation.

Decomposing the velocity compensation mechanism. Relation between the logarithm of the frame area (abscissas) and the logarithm of velocity gain factor. For groups AMC and PK the results of the two sessions are shown separately. Data points are averages over all participants within a group. Bars encompass ± 1 SD. In all cases a linear regression fits very accurately the data points. The parameters of the power law corresponding to the fit in linear scales are indicated inset. Note that the exponent of the power law differs significantly among groups. Averaged over trials and frame sizes, the velocity gain was YC: 13.22; AMC1: 15.94; AMC2: 15.40; PK1: 12.15; PK2: 12.99
The velocity gain factor is independent of the average curvature
We showed that the frame area A has a graded effect both on the average radius of curvature of the traces <R*1/3> and on the velocity gain factor K. However, in order to generalize also to scribbles the notion that K and <R*1/3> reflect the working of different motor mechanisms (see above), one must show that the two factors are independent. This check was performed on the data of the group YC by an analysis of the residuals. First, we computed separately the regressions between <R*1/3> and A, and between Km and A, by taking into account the entire set of 20 (participants) × 10 (frame sizes) = 200 data points. Then, we computed the regression between the residuals with respect to the corresponding regression lines. As shown in Fig. 10, there was no significant correlation between the residuals. As we shall see in the next section, the velocity gain factor is not constant within a trial. However, the lack of correlation shows that, globally, the gain was independent of the curvature of the trace. This conclusion provides further strong support to the contention that velocity is indeed the result of the multiplicative effect of the two factors K and <R*1/3>, and that the decomposition of the velocity suggested by the Two-thirds Power Law captures a significant feature of the underlying motor plan.

Velocity gain factor is independent of average curvature. Scatter diagram of the residuals of the regression between <R *1/3> and the frame area (abscissa) and the regression between K m and the frame area (ordinate). Data for all participants in group YC. The residuals are not correlated
A local form of Isochrony
In this section, we demonstrate that the velocity gain factor K is modulated in a principled fashion in the course of the movement. The motivation for this further analysis is the following. Presumably, long and complex movements such as writing are represented in motor memory as a collection of figural units integrated at the time of execution. It has been suggested that in this case velocity is modulated jointly by the total length of the trace and, at a more local level, by the length of each successive figural unit (Viviani 1986). In scribbling the figural units are selected randomly from the available motor repertoire rather than following a predetermined scheme. However, we hypothesised that in addition to the global control of velocity dictated by the frame that constrains the movement, a similar form of local isochrony is present also in scribbles.
Testing this intuition is not straightforward because there is no principled criterion for identifying the endpoints of figural units. Even when a geometrical feature strongly suggests a natural segmentation in two units (e.g. in the case of a double ellipse), the analysis showed (Viviani and Cenzato 1985) that the influence of path length on motor planning might extend over both units. To overcome this difficulty, we adopted the heuristic strategy that consists in assuming that each segment of trajectory comprised between two points of inflection is a figural unit. This somewhat arbitrary criterion makes sense, however, from the point of view of motor control because inflections mark the transition between opposite directions of rotation.
The analysis of local isochrony was carried out on the pooled results of all participants within a group (Table 3). For each frame size, we began by identifying the trace segments comprised between points of inflection. Segments that were either too short (less than 40% of the average length), or too long (more than 200% of the average length) were discarded. For each segment, we computed its length (Lseg) by integrating the original velocity of the trace, and its average gain factor (Kseg) from the re-sampled trace (re-sampling was again necessary to prevent an over-representation of the high-curvature samples). In keeping with the large difference between the numbers of points of inflection (see above), the average segment length was much longer in young controls than in patients, with the AMC group being somewhat intermediate. The difference among groups of the average segment gain reflected the difference in velocity documented in Fig. 8. In the second step of the analysis, we correlated segment length and segment gain across frame areas. Because the total trace length increased with the frame area, and so did the average segment length (the number of segments was almost constant, irrespective of the frame size, see above), segment lengths were normalized to the population average (Lav) for each frame size. Moreover, in order to neutralize the effect of the area on the velocity gain factor, each segment average Kseg was normalized to the average gain for the entire trace (Kav). Computing the segment gain as V/R*1/3, we took into account the fact that the parameter α depends on the average velocity by estimating α for each group and each frame size through the power function approximation derived above.
Figure 11 shows (log–log scale) the relation between the normalized quantities Kseg/Kav and Lseg/Lav. The power-function approximation to this relation (Table 3) showed that in all groups the velocity gain factor over a segment was positively correlated with its length (for instance, in young controls (Kseg/Kav)=(Lseg/Lav)0.162). However, a significant difference among groups emerged from the last step of the analysis. Both Kav and Lav depended on the frame area A. The usual regression analysis in log–log scale showed that a power function provides a good approximation to both relationships (Table 3; for instance, in young controls we found Kav = 5.160 A0.258; Lav = 1.245 A0.428). By inserting these approximations in the power-function description of the relation between Kseg/Kav and Lseg/Lav, we finally obtained an expression describing explicitly the way segment gain depended jointly on frame area A and segment length Lseg (see Appendix 2). For all groups this procedure for decomposing segment gains yielded

Local isochrony. Scatter diagrams of the logarithm of he normalized segment length (abscissas) and the logarithm of the normalized velocity gain (ordinates) for each segment of the trajectory. The 99% confidence ellipses are also shown. Results for all groups. The diagrams for the two sessions in groups AMC and PK are shown separately. Full details in the text
Because of the size of the samples involved in the correlation analysis, most 99% confidence intervals for the parameters in the expressions above were small and non-overlapping. In particular, for both exponents, all pair-wise differences between groups were significant (P < 0.01). The results, which qualify the analysis of Fig. 9, suggest that the velocity gain factor is set by the joint action of two processes. On the one side, there is a global influence of the frame size captured by the dependence of Kseg on the frame area. On the other side, an additional modulation derives from a local form of isochrony that takes into account the length of the segment being executed. This second process is akin to that at work in the case of both single-stroke, and simple closed trajectories. The effect of segment length (gauged by the exponent of the power law; average over groups: 0.188) was weaker than that observed in the latter case (Viviani and Cenzato 1985). However, the main result of our analysis of local isochrony is that the balance between the weight of local and global isochrony in patients was significantly different from the balance observed in both young and age-matched controls. Specifically, in the former group velocity gain depends more on segment length than frame area. The converse is true for the other two groups.
Discussion
The scribbling traces of the patients revealed the classical cardinal symptoms of PD also observed in other motor tasks. The new finding emerging from our in-depth analysis of velocity control was the dissociation between shape-dependent and shape-independent aspects of the movement.
On the one side, the performance of PD patients exhibited two regularities that are typical of normal hand gestures. First, although the range of values of trace curvature across frame sizes was uniformly higher in patients than in controls (Fig. 5), the traces of the patients were as self-similar across scales as those of the other two groups (Figs. 3, 4). Second, although the traces of the patients were less fluent and regular than those of the control groups (Fig. 2), the Two-thirds Power Law predicted the covariation between instantaneous velocity and curvature with comparable accuracy in both cases (Fig. 7). There are reasons to believe this covariation reflects intrinsic limitations in the neuronal dynamics within the motor cortex (Pellizzer 1997). Thus, the fact that the same instantaneous modulation of velocity was present also in patients suggests that PD has little impact on this dynamics.
On the other side, there was a definite pattern of differences between patients and controls insofar as the timing of the movement is concerned. As concerns velocity, a distinction is in order between absolute and context-dependent control. Confronted with the task of tracing once a given trajectory, everyone chooses idiosyncratically the average velocity of the gesture, largely on the basis of his/her motor habits. All control participants took advantage of this freedom by selecting different baseline tempos for scribbling. Moreover, bradykinesia clearly affected the baseline tempo of patients. Across frame sizes, their average velocity was about 70% lower than that of the other two groups (Fig. 8). However, individual variability was not significantly different among groups.
Context-dependent control of velocity emerges instead when the same gesture is executed successively at different sizes. In this case there is a well-documented spontaneous tendency to modulate the average velocity as a function of movement extent (isochrony). At a global level of analysis (Fig. 8), context-dependent control appeared to be similar in all groups. Although the coefficient of the power–law fit to the frame size/average velocity relation was lowest in patients because of bradykinesia (YC = 3.03; AMC = 3.30; PK = 2.28), the exponents that estimate the strength of the dependence were almost identical (YC = 0.389; AMC = 0.384; PK = 0.380).
By contrast, significant differences among groups were detected by factoring velocity as prescribed by the Two-thirds Power Law (see Fig. 9 and “Results”). The average velocity gain K across frame sizes was similar among groups (YC = 13.22; AMC = 15.66; PK = 12.57). However, the balance between factors was significantly altered in patients with respect to controls. In young controls the coefficient of the power–law fit to the relation between K and frame size was lowest (5.69) and the exponent was highest (0.236), whereas the opposite was true in patients (average over PK1 and PK2: 6.38 and 0.192, respectively). In other words patients did not scale the gain factor K with the frame size as effectively as controls.
Compared with previous studies of isochrony in PD patients (Van Gemmert et al. 1999, 2003), our results show some significant quantitative differences. The extent to which patients under-scaled movement size (about 70% over a ninefold increase of the frame radius) was similar to that reported by Van Gemmert et al. (2003, Figure 2), but over a much smaller (fivefold) increase of stroke size. More importantly, the range of isochronic behaviour was found to be similar in patients and controls only for very short strokes (up to 2 cm; Van Gemmert 1999). Beyond that limit, automatic velocity compensation in patients was much less effective in patients than in controls. As judged form the peak acceleration (velocity data not available), the relative increase from 1 to 5 cm strokes (Van Gemmert et al. 2003, Figure 3) was strongly different in the two groups (60 and 130%, respectively). Instead, in our study the analogous figures for the average velocity over a wider size range were much higher (437 and 452%), and fairly comparable.
The distinction introduced between local and global isochrony exposed a further peculiarity of the PK group. The distinction was motivated by the observation that the velocity gain factor K is not actually constant throughout the movement. Whereas the mean gain factor correlates with a global size parameter—the area of the frame A—the modulation of K around its mean was correlated with a local size parameter, namely the linear extent L seg of the segment of trajectory that is about to be traced. We argue that this modulation reflects the same compensatory mechanism at work when one traces simpler learned trajectories, such as letters in handwriting. Thus, we derived a power–law expression of the gain factor K over a segment in which the contribution of global and local factors is estimated separately (see “Results” A local form of isochrony). A contrast between young controls and patients emerged from this analysis, which was particularly clear for the session where patients were in an OFF state (PK1). The exponent of the power law gauging the strength of the global isochrony factor was significantly higher for group YC than for session PK1 (0.188 vs. 0.145). The converse was true for the exponent gauging the strength of the local isochrony factor L seg (0.162 vs. 0.213). Actually, the ratio between factor strengths for YC was almost twice as large as the ratio for PK1 (0.188/0.162 = 1.16 vs. 0.145/0.213 = 0.64). Two hypotheses may be evoked for the balance shift in patients between local and global compensation. One possible factor is an altered perception of the frame size. In other words patients might underestimate the extent of the space available for the movement. We are not aware of any independent evidence of such a deficit in the perception of space. However, recent work (Desmurget et al. 2000, 2004a) failed to detect a similar deficit in perceived distance. Alternatively, the reduced ability by patients to scale velocity as a function of frame size might reflect the strategic choice to focus attention on the microstructure of the movement to compensate for the reduced accuracy of their gestures.
In the next two sections the dissociation between shape-dependent aspects of the performance that are not affected by PD and shape-independent aspects that are affected is taken up again within the context of current theorizing on the parameters of the movement that are more directly controlled by the motor system.
The control of amplitude and direction of voluntary movements
In considering the role of cortical and sub-cortical centres in motor control, we endorse the so-called vectorial hypothesis that direction and amplitude are the relevant parameters for controlling goal-directed movements. The hypothesis is strongly supported by recent behavioural studies (Bock and Eckmiller 1986; Favilla et al., 1990; Bock and Arnold 1992; Gordon et al. 1994a; Pine et al. 1996; Vindras and Viviani 1998), and is consistent with neurophysiological studies showing that movement direction is predicted reliably by the tuning curves of the neurons in the motor cortex (Georgopoulos et al. 1983a; Moran and Schwartz 1999). Note that, although the vectorial hypothesis has been formulated mostly on the basis of the results obtained in pointing tasks, it can equally well account for the control of direction in drawing tasks (Schwartz 1992, 1994; Schwartz and Moran 2000).
Demonstrating that movement amplitude can also be predicted by cortical activity has proved elusive. The neuronal activity in the primary motor area during a pointing task was found to depend on target distance (Schwartz and Georgopoulos 1987), but the correlation was weak. A later study failed to detect any systematic relation between movement amplitude and the activity in both motor cortex and parietal area 5 (Georgopoulos 1990). This negative result was confirmed by the analysis of wrist flexions and extensions in a reaction time task (Riehle and Requin 1989). Evidence of amplitude coding has been reported in monkeys performing visually guided arm movements (Fu et al. 1993), but reliable correlations were found only in too few cells to be able to predict movement distance with the same accuracy as movement direction. Other studies also failed to provide convincing evidence that movement amplitude is fully controlled by motor cortex, either because the distance-related modulation of the firing rate occurred after the peak of velocity (Fu et al. 1995), or because of methodological problems (Kurata 1993).
In BG the pattern of correlations between neural activity and movement direction is similar to that found in the motor cortex (Georgopoulos et al. 1983b; Turner and Anderson 1997). In contrast, the search for correlations with movement amplitude has again proved inconclusive. Activity related to movement amplitude and velocity has been observed in a large proportion of subthalamic and pallidal neurons either after movement onset or, less frequently, between the onset of EMG activity and movement onset. Moreover, inhibition or destruction of neurons in the GP reduces the velocity of arm movements (Mink and Thach 1991c; Inase et al. 1996; Desmurget and Turner 2008). However, other studies concluded that BG activity does not relate to amplitude (Brotchie et al. 1991; Mink and Thach 1991a, b). Even in the case of simple flexions and extensions of the wrist, the activity of pallidal neurons is strongly dependent on the nature of the task (Mink and Thach 1991a), but quite independent of the kinematic parameters (Mink and Thach 1991b).
A multiplicative model
To reconcile the notion that hand movements are planned in terms of direction and amplitude with the absence of clear neuronal correlates of amplitude coding, Vindras and Viviani (2002) suggested that amplitude is specified jointly by the motor cortex and the BG. Therefore, the activity in either one of these two structures alone is insufficient to account for the final output to the muscles. Here we argue that a further qualification of our hypothesis provides an appropriate framework for discussing the results of the present study.
First, we assume that the motor cortex specifies the spatio-temporal template of the movement, i.e. a blueprint in which both duration and size are free parameters. In the case of scribbling, where no global plan is available before movement begins, partial blueprints are generated sequentially, drawing presumably from a set of basic templates. Second, we also assume that the BG modulate this structural information by taking into account both the entire gesture of which the movement is a component and the context within which the gesture is executed. The assumption is in keeping with the role of context recognition that has been proposed for the BG (Houk and Wise 1995), with the task-related activity observed in pallidal neurons (Mink and Thach 1991a), and with the suggestion by Turner et al. (1998) that the BG controls the scaling of arm movements.
The modulatory effect of the BG may take place through their projections back to the cortex. Moreover, the BG may also scale the movement by biasing the spinal reflex circuits via its descending output to the brainstem (Johnson et al. 1991; Baldissera et al. 1994; Munro-Davies et al. 1999; Braak et al. 2000; Delwaide et al. 2000; Meunier et al. 2000). The latter hypothesis has a neuro-anatomical basis inasmuch as most axons projecting from the GPi to the thalamus send collaterals to a brainstem area projecting to the reticulo-spinal motor system (Mink 1996).
The simplest implementation of the general framework outlined is suggested by a recent review (Ashe 1997) showing that the slope of the relation between the level of cortical activity and the level of static force is inversely correlated with the range of forces required by the task. Thus, a fixed level of activity may correspond to a whole range of force output, as if a multiplicative factor scaled the effects of the cortical commands on muscles according to specific task requirements. Along the same line of reasoning we assume that the BG modulation action takes the form of a multiplicative gain factor acting on both size and velocity.
As for size, form-preserving scaling can be remarkably effective in normal individuals, even when the scale change entails the activation of different body segments (Wiesendanger 1998). Although the control of absolute size is problematic in patients, the self-similarity of the trajectories across frame sizes suggests that the mechanisms underlying context-dependent size scaling are relatively spared by PD. Note that, within the logic of our framework, size scaling must precede velocity scaling because the phenomenon of isochrony implies that average velocity depends on the estimated spatial extent of the movement.
As for the control of velocity, we surmise that the scaling factor is captured by the coefficient K in the Two-thirds Power Law. If so, our analysis of isochrony suggests two conclusions. First, the general reduction of the base tempo in patients is compounded with a reduced ability to scale average velocity as a function of the spatial context (frame size). Second, at the level of single segments this global scaling deficit is partly compensated by a significant increase of the local modulation of the gain factor. In turn, such compensation may reflect an altered balance between the respective roles of cortical and sub-cortical centres.
The fact that the relational aspects of the movement—namely the self-similarity of the trajectories across frame sizes (Figs. 3, 4) and the dependence of the instantaneous velocity on the curvature (Figs. 6, 7)—were rather similar across groups suggests that PD symptoms do not signal a cortical planning deficit. Instead, the clear evidence of micrographia, and the irregularities often present in the traces of the patients may result from the insufficient size scaling of the movement blueprint compounded with a defective velocity scaling. One cannot rule out that the irregularities are also due to a defective control of the spinal mechanisms that permit fast alternations of muscle contractions and relaxations.
Change history
24 April 2024
In this article, the family name of the author Catalano Chiuvé , Sabina was incorrect. This has been corrected.
References
Adamovich SV, Berkinblit MB, Hening W, Sage J, Poizner H (2001) The interaction of visual and proprioceptive inputs in pointing to actual and remembered targets in Parkinson’s disease. Neuroscience 104:1027–1041
Ashe J (1997) Force and the motor cortex. Behav Brain Res 87:255–269
Baldissera F, di Loreto S, Florio T, Scarnati E (1994) Short-latency excitation of hindlimb motoneurons induced by electrical stimulation of the pontomesencephalic tegmentum in the rat. Neurosci Lett 169:13–16
Benecke R, Rothwell JC, Dick JPR, Day BL, Marsden CD (1986) Performance of simultaneous movements in patients with Parkinson’s disease. Brain 109:739–757
Benecke R, Rothwell JC, Dick J, Day BL, Marsden CD (1987) Simple and complex movements off and on treatment in patients with Parkinson’s disease. J Neurol Neurosurg Psychiatry 50:296–303
Berardelli A, Dick JPR, Rothwell JC, Day BL, Marsden CD (1986a) Scaling of the size of the first agonist EMG burst during rapid wrist movements in patients with Parkinson’s disease. J Neurol Neurosurg Psychiatry 49:1273–1279
Berardelli A, Accornero N, Argenta M, Meco G, Manfredi M (1986b) Fast complex arm movements in Parkinson’s disease. J Neurol Neurosurg Psychiatry 49:1146–1149
Berardelli A, Rothwell JC, Thompson PD, Hallett M (2001) Pathophysiology of bradykinesia in Parkinson’s disease. Brain 124:2131–2146
Bloxham CA, Mindel TA, Frith CD (1984) Initiation and execution of predictable and unpredictable movements in Parkinson’s disease. Brain 107:371–384
Bock O, Eckmiller R (1986) Goal-directed arm movements in absence of visual guidance: evidence for amplitude rather than position control. Exp Brain Res 62:451–458
Bock O, Arnold K (1992) Motor control prior to movement onset: preparatory mechanisms for pointing at visual targets. Exp Brain Res 90:209–216
Braak H, Rüb U, Sandmann-Keil D, Gai WP, de Vos RAI, Jansen Steur ENH et al (2000) Parkinson’s disease: affection of brain stem nuclei controlling premotor and motor neurons of the somatomotor system. Acta Neuropathol 99:489–495
Braak H, Del Tredici K, Rüb U, de Vos RAI, Jansen Steur ENH, Braak E (2003) Staging of brain pathology related to sporadic Parkinson’s disease. Neurobiol Aging 24:197–211
Brotchie PR, Iansek R, Horne MK (1991) Motor function of the globus pallidus. 1. Neuronal discharge and parameters of movement. Brain 114:1667–1683
Brown JS, Knauft EB, Rosenbaum G (1948) The accuracy of positioning reactions as a function of their direction and extent. Am J Psychol 61:167–182
Brown RG, Jahanshahi M (1998) An unusual enhancement of motor performance during bimanual movement in Parkinson’s disease. J Neurol Neurosurg Psychiatry 64:813–816
Cardebat D, Doyon B, Puel M, Goulet P, Joanette Y (1990) Formal and semantic lexical evocation in normal subjects. Performance and dynamics of production as a function of sex, age and educational level (Article in French). Acta Neurol Belg 90:207–217
Castiello U, Bennett KMB (1997) The bilateral reach-to-grasp movement of Parkinson’s disease subjects. Brain 120:593–604
Day BL, Dick JP, Marsden CD (1984) Patients with Parkinson’s disease can employ a predictive motor strategy. J Neurol Neurosurg Psychiatry 47:1299–1306
Delwaide PJ, Pepin JL, de Pasqua V, Maertens de Noordhout A (2000) Projections from basal ganglia to tegmentum: a subcortical route for explaining the pathophysiology of Parkinson’s disease signs? J Neurol (suppl 2)II:75–81
Demirci M, Grill S, McShane L, Hallett M (1997) A mismatch between kinaesthetic and visual perception in Parkinson’s disease. Ann Neurol 41:781–788
Desmurget M, Vindras P, Gréa H, Viviani P, Grafton ST (2000) Proprioception does not quickly drift during visual occlusion. Exp Brain Res 134:363–377
Desmurget M, Grafton ST, Vindras P, Gréa H, Turner RS (2003) Basal Ganglia network mediates the control of movement amplitude. Exp Brain Res 153:197–209
Desmurget M, Gaveau V, Vindras P, Turner RS, Broussolle E, Thobois S (2004a) On-line motor control in patients with Parkinson’s disease. Brain 127:1754–1773
Desmurget M, Grafton ST, Vindras P, Gréa H, Turner RS (2004b) The basal ganglia network mediates the planning of movement amplitude. Eur J Neurosci 19:2871–2880
Desmurget M, Turner RS (2008) Testing basal ganglia motor functions through reversible inactivations in the posterior internal globus pallidus. J Neurophysiol 99:1057–1076
Draper IT, Johns RS (1964) The disordered movement in parkinsonism and the effect of drug treatment. Bull Hosp J Hopkins 115:465–480
Evarts EV, Teräväinen H, Calne DB (1981) Reaction times in Parkinson’s disease. Brain 104:167–186
Favilla M, Gordon J, Hening W, Ghez C (1990) Trajectory control in targeted force impulses. VII Independent setting of amplitude and direction in response preparation. Exp Brain Res 79:530–538
Flash T, Inzelberg R, Schechtman E, Korczyn AD (1992) Kinematic analysis of upper limb trajectories in Parkinson’s disease. Exp Neurol 118:215–226
Flowers KA (1975) Ballistic and corrective movements on an aiming task. Neurology 25:413–421
Flowers KA (1976) Visual ‘closed-loop’ and ‘open-loop’ characteristics of voluntary movement in patients with parkisonism and intention tremor. Brain 99:269–310
Flowers KA (1978a) Some frequency response characteristics of Parkinsonism on pursuit tracking. Brain 101:19–34
Flowers KA (1978b) Lack of prediction in the motor behavior of Parkinsonism. Brain 101:35–52
Freeman FN (1914) Experimental analysis of the writing movement. Psychol Rev 17:1–46
Fu QG, Flament D, Coltz JD, Ebner TJ (1995) Temporal encoding of movement kinematics in discharge of primate primary motor and premotor neurons. J Neurophysiol 73:836–854
Fu QG, Suarez JI, Ebner TJ (1993) Neuronal specification of direction and distance during reaching movements in the superior precentral premotor area and primary motor cortex of monkeys. J Neurophysiol 70:2097–2116
Georgiou N, Iansek R, Bradshaw JL, Phillips JG, Mattingley JB, Bradshaw JA (1993) An evaluation of the role of internal cues in the pathogenesis of parkinsonian hypokinesia. Brain 116:1575–1587
Georgopoulos AP, Caminiti R, Kalaska JF, Massey JT (1983a) Spatial coding of movement: a hypothesis concerning the coding of movement direction by motor cortical populations. Exp Brain Res Suppl 7:327–336
Georgopoulos AP, DeLong MR, Crutcher MD (1983b) Relations between parameters of step-tracking movements and single cells discharge in the globus pallidus and subthalamic nucleus of the behaving monkey. J Neurosci 3:1586–1598
Georgopoulos AP (1990) Neurophysiology of reaching. In: Jeannerod M (ed) Attention and performance XIII. Erlbaum, Hillsdale, pp 227–263
Ghilardi MF, Alberoni M, Rossi M, Franceschi M, Mariani C, Fazio F (2000) Visual feedback have differential effects on reaching movements in Parkinson’s and Alzheimer disease. Brain Res 876:112–123
Glickstein M, Stein J (1991) Paradoxical movement in Parkinson’s disease. Trends Neurosci 14:480–482
Godaux E, Koulischer D, Jacquy J (1992) Parkinsonian bradykinesia is due to depression in the rate of rise of muscle activity. Ann Neurol 31:93–100
Gordon J, Ghilardi MF, Ghez C (1994a) Accuracy of planar reaching movements: 1. Independence of direction and extent variability. Exp Brain Res 99:97–111
Gordon J, Ghilardi MF, Cooper SE, Ghez C (1994b) Accuracy of planar reaching movements: 2. Systematic extent errors resulting from inertial anisotropy. Exp Brain Res 99:112–130
Hallett M, Khoshbin S (1980) A physiological mechanism of bradykinesia. Brain 103:301–314
Hallett M, Shahani BT, Young RR (1977) Analysis of stereotyped voluntary movements at the elbow in patients with Parkinson’s disease. J Neurol Neurosurg Psychiatry 40:1129–1135
Harrington DL, Haaland KY (1991) Sequencing in Parkinson’s disease: abnormalities in programming and controlling movement. Brain 114:99–115
Hoehn MM, Yahr MD (1967) Parkinsonism: onset, progression and mortality. Neurology 17:427–442
Houk JC, Wise SP (1995) Distributed modular architectures linking basal ganglia, cerebellum, and cerebral cortex: their role in planning and controlling action. Cereb Cortex 2:95–110
Inase M, Buford JA, Anderson ME (1996) Changes in the control of arm position, movement, and thalamic discharge during local inactivation in the globus pallidus of the monkey. J Neurophysiol 75:1087–1104
Jahanshahi M, Brown RG, Marsden CD (1992) Simple and choice reaction time and the use of advance information for motor preparation in Parkinson’s disease. Brain 115:539–564
Johnson MTV, Kipnis AN, Lee MC, Loewenson RB, Ebner TJ (1991) Modulation of the stretch reflex during volitional sinusoidal tracking in Parkinson’s disease. Brain 114:443–460
Kendall MG, Stuart A (1968) The advanced theory of statistics. Griffin, London
Kurata K (1993) Premotor cortex activity of monkey: set- and movement-related activity reflecting amplitude and direction of wrist movements. J Neurophysiol 9:187–200
Lacquaniti F, Terzuolo CA, Viviani P (1983) The law relating kinematic and figural aspects of drawing movements. Acta Psychol 54:115–130
Lacquaniti F, Terzuolo CA, Viviani P (1984) Global metric properties and preparatory processes in drawing movements. In: Kornblum S, Requin J (eds) Preparatory states and processes. Erlbaum, Hillsdale, pp 357–370
Majsak MJ, Kaminski TR, Gentile AM, Flanagan JR (1998) The reaching movement of patients with Parkinson’s disease under self-determined maximal speed and visually cued conditions. Brain 121:755–766
Marsden CD (1982) The mysterious motor function of the basal ganglia: the Robert Wartenberg lecture. Neurology 32:514–539
Mazzoni P, Hristova A, Krakauer JW (2007) Why don’t we move faster? Parkinson’s disease, movement vigor, and implicit motivation. J Neurosci 27:7105–7116
McLennan JE, Nakano K, Tyler HR, Schwab RS (1972) Micrographia in Parkinson’s disease. J Neurol Sci 15:141–152
Meunier S, Pol S, Houeto JL, Vidailhet M (2000) Abnormal reciprocal inhibition between antagonist muscles in Parkinson’s disease. Brain 123:1017–1026
Michel F (1971) Experimental study of the graphic gesture (Article in French). Neuropsychologia 9:1–13
Mink JW (1996) The basal ganglia: focused selection and inhibition of competing motor programs. Prog Neurobiol 50:381–425
Mink JW, Thach WT (1991a) Basal ganglia motor control: I. Nonexclusive relation of pallidal discharge to five movement modes. J Neurophysiol 65:273–300
Mink JW, Thach WT (1991b) Basal ganglia motor control: II. Late pallidal timing relative to movement onset and inconsistent pallidal coding of movement parameters. J Neurophysiol 65:301–329
Mink JW, Thach WT (1993) Basal ganglia motor control: III. Pallidal ablation: normal reaction time, muscle cocontraction, and slow movement. J Neurophysiol 65:330–351
Moore AP (1987) Impaired sensorimotor integration in parkinsonism and dyskinesia: a role for corollary discharges? J Neurol Neurosurg Psychiatry 50:544–552
Moore AP (1989) Vibration-induced illusions of movement are normal in Parkinson’s disease: implications for the mechanism of the movement disorders. In: Crossman AR, Sambrook MA (eds) Neural mechanisms in disorders of movement. John Libbey, London, pp 307–311
Moran DW, Schwartz AB (1999) Motor cortical representation of speed and direction during reaching. J Neurophysiol 82:2676–2692
Morris ME, Huxham F, McGinley J, Dodd K, Iansek R (2001) The biomechanics and motor control of gait in Parkinson disease. Clin Biomech 16:459–470
Morris ME, Iansek R, Matyas TA, Summers JJ (1994) The pathogenesis of gait hypokinesia in Parkinson’s disease. Brain 117:1169–1181
Munro-Davies LE, Winter J, Aziz TZ, Stein JF (1999) The role of the pedunculopontine region in basal-ganglia mechanisms of akinesia. Exp Brain Res 129:511–517
Ostry DJ, Cooke JD, Munhall KG (1987) Velocity curves of human arm and speech movements. Exp Brain Res 68:37–46
Pahapill PA, Lozano AS (2000) The pedunculopontine nucleus and Parkinson’s disease. Brain 123:1767–1783
Papoulis A (1965) Probability, random variables and stochastic processes. McGraw-Hill, New York
Pascual-Leone A, Valls-Solé J, Brasil-Neto JP, Cohen LG, Hallett M (1994) Akinesia in Parkinson’s disease. I. Shortening of simple reaction time with focal, single-pulse transcranial magnetic stimulation. Neurology 44:884–891
Pellizzer G (1997) Transformation of the intended direction of movement during motor trajectories. Neuroreport 8:3447–3452
Pfann KD, Buchman AS, Comella CL, Corcos DM (2001) Control of movement distance in Parkinson’s disease. Mov Disord 16:1048–1065
Pine ZM, Krakauer JW, Gordon J, Ghez C (1996) Learning of scaling factors and reference axes for reaching movements. Neuroreport 7:2357–2361
Riehle A, Requin J (1989) Monkey primary motor and premotor cortex: single-cell activity related to prior information about direction and extent of an intended movement. J Neurophysiol 61:534–549
Schneider JS, Diamond SG, Markham CH (1987) Parkinson’s disease: sensory and motor problems in arms and hands. Neurology 37:951–956
Schnider A, Gutbrod K, Hess CW (1995) Motion imagery in Parkinson’s disease. Brain 118:485–493
Schwab RS, Chafetz ME, Walker S (1954) Control of two simultaneous voluntary motor acts in normals and parkinsonism. Arch Neurol 72:591–598
Schwartz AB, Georgopoulos AP (1987) Relations between the amplitude of 2-dimensional arm movements and single cell discharge in primate motor cortex (Abstract). Abstr Soc Neurosci 13:244
Schwartz AB (1992) Motor cortical activity during drawing movements: single-unit activity during sinusoid tracing. J Neurophysiol 68:528–541
Schwartz AB (1994) Direct cortical representation of drawing. Science 265:540–542
Schwartz AB, Moran DW (2000) Arm trajectory and representation of movement processing in motor cortical activity. Eur J Neurosci 12:1851–1856
Sheridan MR, Flowers KA, Hurrell J (1987) Programming and execution of movement in Parkinson’s disease. Brain 110:1247–1271
Simonetta-Moreau M, Meunier S, Vidailhet M, Pol S, Galitzky M, Rascol O (2002) Transmission of group II heteronymous pathways is enhanced in rigid lower limb of de novo patients with Parkinson’s disease 125: 2125–2133
Stebbins GT, Goetz CG (1998) Factor structure of the unified Parkinson’s disease rating scale: motor examination scale. Mov Dis 13:633–636
Teasdale N, Phillips JG, Stelmach GE (1990) Temporal movement control in Parkinson’s disease. J Neurol Neurosurg Psychiatry 53:862–868
Turner RS, Anderson ME (1997) Pallidal discharge related to the kinematics of reaching movements in two dimensions. J Neurophysiol 77:1051–1074
Turner RS, Grafton ST, Votaw JR, DeLong MR, Hoffman JM (1998) Motor subcircuits mediating the control of movement velocity: a PET study. J Neurophysiol 80:2162–2176
Van Gemmert AWA, Teulings H-L, Contrrras-Vidal JL, Stelmach GE (1999) Parkinson’s disease and the control of size and speed in handwriting. Neuropsychologia 37:685–694
Van Gemmert AWA, Adler CH, Stelmach GE (2003) Parkinson’s disease patients undershoot target size in handwriting and similar tasks. J Neurol Neurosurg Psychiatry 74:1502–1508
Vindras P, Viviani P (1998) Frames of reference and control parameters in visuo-manual pointing. J Exp Psychol Hum Percept Perform 24:569–591
Vindras P, Viviani P (2002) Altering the visuomotor gain: evidence that motor plans deal with vector quantities. Exp Brain Res 147:280–295
Vingerhoets FJ, Schulzer M, Calne DB, Snow BJ (1997) Which clinical sign of Parkinson’s disease best reflects the nigrostriatal lesion? Ann Neurol 41:58–64
Vinter A, Gras P (1998) Spatial features of angular drawing movements in Parkinson’s disease patients. Acta Psychol 100:177–193
Viviani P, Terzuolo CA (1980) Space–time invariance in learned motor skills. In: Stelmach GE, Requin J (eds) Tutorials in motor behavior. North-Holland, Amsterdam, pp 525–533
Viviani P, Terzuolo CA (1982) Trajectory determines movement dynamics. Neuroscience 7:431–437
Viviani P, Terzuolo CA (1983) The organization of movement in handwriting and typing. In: Butterworth B (ed) Language production, vol II. Development, writing and other language processes. Academic Press, New York, pp 103–146
Viviani P, McCollum G (1983) The relation between linear extent and velocity in drawing movements. Neuroscience 10:211–218
Viviani P, Cenzato M (1985) Segmentation and coupling in complex movements. J Exp Psychol Hum Percept Perform 11:828–845
Viviani P (1986) Do units of motor action really exist? In: Heuer H, Fromm C (eds) Generation and modulation of action patterns. Springer, Berlin, pp 201–216
Viviani P, Zanone PG (1988) Spontaneous covariations of movement parameters in 5- to 7-years old boys. J Mot Behav 20:205–216
Viviani P, Flash T (1995) Minimum-jerk, Two-thirds Power Law, and isochrony: converging approaches to movement planning. J Exp Psychol Hum Percept Perform 21:32–53
Viviani P, Schneider R (1991) A developmental study of the relationship between geometry and kinematics in drawing movements. J Exp Psychol Hum Percept Perform 17:198–218
Viviani P, Stucchi N (1992) Biological movements look uniform: evidence of motor-perceptual interactions. J Exp Psychol Hum Percept Perform 18:603–623
Warabi T, Noda H, Yanagisawa N, Tashiro K, Shindo R (1986) Changes in sensorimotor function associated with the degree of bradykinesia in Parkinson’s disease. Brain 109:1209–1224
Weiss P, Stelmach GE, Hefter H (1997) Programming of a movement sequence in Parkinson’s disease. Brain 120:91–102
Wichmann T, DeLong MR (1996) Functional and pathophysiological models of the basal ganglia. Curr Opin Neurobiol 6:751–758
Wiesendanger M (1998) Bernstein’s principle of equal simplicity and related concepts. In: Latash ML (ed) Bernstein’s tradition in movement studies, vol 1. Human Kinetics, Champaign, pp 105–125
Zia S, Cody F, O’Boyle D (2000) Joint position sense is impaired by Parkinson’s disease. Ann Neurol 47:218–228
Acknowledgments
This research was supported by the National Research Fund of Switzerland [Grant #3100-68169 to PV]. We are grateful to two anonymous reviewers for suggesting a number of significant improvements to the first draft of this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
An erratum to this article can be found at http://dx.doi.org/10.1007/s00221-009-1731-7
Appendices
Appendix 1
We define the parameters selected for the analysis of the movements and detail the data processing for their estimation.
Scaling and smoothing
Traces were aligned by computing the centre of gravity of the samples and shifting all samples so that the new centre was at the origin of the coordinate system. Most of the parameters involve the computation of time derivatives. Because we needed explicit expressions for derivatives (see later), we adopted an interpolation method based on harmonic analysis. The coordinates x = x(t) and y = y(t) of the movement were decomposed in Fourier series:
Preliminary tests showed that retaining the first 50 terms of the series yields an excellent approximation to the traces and is also effective for eliminating uncorrelated noise from the data. All further processing was applied to the truncated series. First and second time derivatives were computed analytically.
Computing the characteristic parameters of the trace
The following parameters were computed from each trace:
-
(a)
Tangential velocity [V(t)]:
$$ V(t) = \sqrt {\left( {\frac{{\rm d}x}{{\rm d}t}} \right)^{2} + \left( {\frac{{\rm d}y}{{\rm d}t}} \right)^{2} } $$The average velocity of the trace V 0 is related to the total trace length (L) by the equation \( V_{0} = {L \mathord{\left/ {\vphantom {L T}} \right. \kern-\nulldelimiterspace} T}. \)
-
(b)
Total length (L):
$$ L = \int\limits_{0}^{T} {V(t){\text{d}}t} = \int\limits_{0}^{T} {\sqrt {\left( {\frac{{{\text{d}}x}}{{{\text{d}}t}}} \right)^{2} + \left( {\frac{{{\text{d}}y}}{{{\text{d}}t}}} \right)^{2} } } {\text{d}}t $$This parameter was computed by integrating numerically the tangential velocity.
-
(c)
Number of inflections [N I]. An inflection in a 2D trajectory is a point were the curvature of the trajectory changes sign. Inflections were located by identifying the sample index k such that the quantity
$$ \frac{{{\text{d}}x(t_{k} )}}{{{\text{d}}t}}\frac{{d^{2} y(t_{k} )}}{{{\text{d}}t^{2} }} - \frac{{d^{2} x(t_{k} )}}{{{\text{d}}t^{2} }}\frac{{{\text{d}}y(t_{k} )}}{{{\text{d}}t}} $$changes sign between k and k + 1.
-
(d)
Length of trajectory segments (L seg). Segments were defined as portions of the trajectory bounded by two successive points of inflection. Thus, in a trace there were N s = N I − 1 segments. When trajectory was almost straight, several inflections occurred in close succession.
-
(e)
Time average of the one-third power of the radius \( \left[ {R_{m}^{{*{1 \mathord{\left/ {\vphantom {1 3}} \right. \kern-\nulldelimiterspace} 3}}} } \right]. \) The function R(t) that describes how the radius of curvature of the trajectory changes in time is
$$ R(t) = \frac{{V(t)^{3} }}{{\left| {\frac{{{\text{d}}x}}{{{\text{d}}t}}\frac{{d^{2} y}}{{{\text{d}}t^{2} }} - \frac{{\text {d}}y}{{{\text{d}}t}}\left. {\frac{{d^{2} x}}{{{\text{d}}t^{2} }}} \right|} \right.}} $$The radius of curvature increases in the proximity of a point of inflection where it becomes infinite. The most recent formulation of Two-thirds Power Law circumvents this difficulty by expressing the velocity as a power function of the normalized radius R *(t) defined as
$$ R^{*} (t) = \frac{R(t)}{1 + \alpha R(t)} $$As the movement approaches an inflection, R * stays finite and tends to the limit 1/α. The required time average \( \langle R^{{*{1 \mathord{\left/ {\vphantom {1 3}} \right. \kern-\nulldelimiterspace} 3}}} \rangle \) was computed by numerical evaluation of the integral
$$ \langle R^{{*{1 \mathord{\left/ {\vphantom {1 3}} \right. \kern-\nulldelimiterspace} 3}}} \rangle = \frac{1}{T}\int\limits_{0}^{T} {R^{*} (t)^{{\frac{1}{3}}} {\text{d}}t} $$ -
(f)
Average curvature [C m]. Curvature is the inverse of the radius of curvature. It would be inappropriate to compute the average curvature using directly the Fourier approximation of the trajectory. Because the instantaneous velocity decreases with curvature as prescribed by the Two-thirds Power Law, and because the sampling rate is constant, the sample density around the high-curvatures portions of the trajectory is much higher than the density within low-curvature portions. Thus, numerical integration of the inverse of the radius R(t) would severely overestimate the average geometric curvature. Instead, we adopted the following resampling strategy. Let us consider a doubly differentiable time function φ = φ(t) such that φ(0) = 0 and φ(T) = T, where T is the total duration of the movement. The parametric equations [x = x(φ(t)), y = y(φ(t))] describe the same trajectory C as the original ones [x = x(t), y = y(t)]. However, the kinematics of the movement depends on the function φ, and the correspondent transformed velocity is in general different from the velocity of the actual movement:
$$ V_{\varphi } (t) = \frac{{{\text{d}}\varphi }}{{{\text{d}}t}}\left[ {\left( {\frac{{{\text{d}}x}}{{{\text{d}}\varphi }}} \right)^{2} + \left( {\frac{{{\text{d}}y}}{{{\text{d}}\varphi }}} \right)^{2} } \right]^{{\frac{1}{2}}} $$The expression above can be rewritten as a separable nonlinear differential equation:
$$ {\text{d}}\varphi = V_{\varphi } (t)\left[ {\left( {\frac{{{\text{d}}x}}{{{\text{d}}\varphi }}} \right)^{2} + \left( {\frac{{{\text{d}}y}}{{{\text{d}}\varphi }}} \right)^{2} } \right]^{{\frac{1}{2}}} {\text{d}}t $$Under mild continuity conditions, for any choice of the transformed velocity function V φ(t), solving the equation above yields the unique function φ that is compatible with this choice. We imposed the condition that the tangential velocity is constant and equal to the average velocity of the actual movement (V φ(t) = L/V m) and computed the solution φ(t) with a fourth-order Runge–Kutta algorithm with the boundary conditions φ(0) = 0 and φ(T) = T. By inserting the solution φ(t) back into the parametric equations, the original movement was resampled so that successive data points were spaced by a constant fraction of the total length rather then by a constant time interval (the total number of samples was kept equal to 2,000 as in the original trace). Finally, the average geometric curvature was calculated as the mean over all samples of the inverse of the radius. Note that this strategy was possible only because the Fourier series affords an analytical approximation to the traces.
-
(g)
Average gain factor [K m]. According to the Two-Thirds Power Law, the multiplicative parameter K (gain factor) is approximately constant over successive units of motor action. We computed the average gain factor for the entire trace by numerical estimation of the integral
$$ K_{m} = \frac{1}{T}\int\limits_{0}^{T} {\left| {\frac{{{\text{d}}x(t)}}{{{\text{d}}t}}\frac{{d^{2} y(t)}}{{{\text{d}}t^{2} }} - \frac{{{\text{d}}y(t)}}{{{\text{d}}t}}\frac{{d^{2} x(t)}}{{{\text{d}}t^{2} }}} \right|^{{\frac{1}{3}}} {\text{d}}t} $$In the same manner, we computed the average gain factors K seg for each segment within the complete trace.
Appendix 2
We specify the method for testing the statistical significance of parameters in the equation relating frame area A and segment length Lseg to segment gain Kseg. The three equations to be combined are (relevant stochastic variables in boldface)
As expected, c0 was almost indistinguishable from 1. Therefore
where C = c1c -ξ2 and φ = θ − ψξ. The variances σ 2e of the exponents ξ, θ and ψ are estimated directly from the regression equations
through the formula (Kendall and Stuart 1968, p. 395):
where ρ is Fisher’s correlation coefficient and N is the sample size. The averages of the regression coefficients a1 = log(c1) and a2 = log(c2) are μa1 = a1 and μa1 = a1, respectively. Their variances σ 2a are estimated by
If two stochastic variables are related by a monotonic function y = g(x) the pdf of y is given by fy(y) = fx(g−1(y))/dg(g−1(y))/dx (Papoulis 1965, p. 126). We assume that both a1 and a2 have a Gaussian pdf. Thus, because c1 = exp(a1) and c2 = exp(a2) the pdf of c1 and c2 have the common expression
By computing first and second moments of this distribution, average and variance of c1 and c2 can expressed in terms of known quantities
Finally, the pdf of C = c1c −ξ2 and φ = θ − ψξ cannot be computed in closed form. However, the pdf of all stochastic variables appearing in the expressions of C and φ are known. Thus, the variances σ 2C and σ 2φ and the corresponding 99% confidence intervals were finally estimated with a Montecarlo procedure (n = 30,000).
Rights and permissions
About this article
Cite this article
Viviani, P., Burkhard, P.R., Catalano Chiuvé, S. et al. Velocity control in Parkinson’s disease: a quantitative analysis of isochrony in scribbling movements. Exp Brain Res 194, 259–283 (2009). https://doi.org/10.1007/s00221-008-1695-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-008-1695-z