
Abstract
Numerous studies have shown that when people encounter a sudden and novel sensorimotor transformation that alters perceived or actual movement, they gradually adapt and can later recall what they have learned if they encounter the transformation again. In this study, we tested whether retention and recall of learning is also observed when kinematic and dynamic transformations are introduced incrementally such that participants never experience large movement errors. Participants adapted their reaching movements to either a visuomotor rotation of hand position (kinematic transformation) or a rotary viscous force-field applied to the hand (dynamic transformation). These perturbations were introduced either incrementally or instantaneously. Thus, four groups of participants were tested with an incremental and an instantaneous group for both the kinematic and dynamic perturbations. To evaluate retention of learning, participants from all four groups were tested a day later on the same kinematic or dynamic perturbation presented instantaneously (at full strength). As expected, we found that subjects in the instantaneous group retained learning across days. We also found that, for both kinematic and dynamic perturbations, retention was equally good or better when the transformation was introduced incrementally. Because large and clearly detectable movement errors were not observed during adaptation to incremental perturbations, we conclude that such errors are not required for the learning and retention of internal models of kinematic and dynamic sensorimotor transformations.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The acquisition of new motor skills often involves learning novel mappings between motor commands and sensory signals. For example, to develop skill in tennis, the novice player must learn the kinematic mapping between hand motion and motion of the racquet head as well as the dynamic mapping between forces applied to the handle and racquet movement. Previous studies have shown that people can adapt their reaching movements to a range of novel kinematic and dynamic mappings including altered visual feedback of hand position (Cunningham and Welch 1994; Martin et al 1996; Krakauer et al 1999; Vetter and Wolpert 2000; Bock et al 2001; Wigmore et al 2002) and unusual movement-dependent forces applied to the hand (Brashers-Krug et al 1996; Conditt et al 1997; Flanagan and Wing 1997; Shadmehr and Mussa-Ivaldi 1994; Krakauer et al 1999; Tong et al 2002) or arm (Lackner and DiZio 1994; Singh and Scott 2003). Moreover, following adaptation, people can recall what they have learned when they encounter the same task and environment at a later time (Brashers-Krug et al 1996; Shadmehr and Brashers-Krug 1997; Krakauer et al 1999; Goedert and Willingham 2002; Caithness et al 2004). This indicates that the CNS acquires and maintains internal models of sensorimotor mappings for different tasks and environments (Flanagan et al 1999; Kawato 1999; Wolpert and Ghahramani 2000).
Several studies have compared adaptation to novel kinematic and dynamic transformations introduced incrementally with adaptation to the same transformations introduced at full strength. Kagerer et al (1997) and Ingram et al (2000) compared adaptation to incremental and sudden alterations of visually perceived movement direction and extent, respectively. Both studies found more complete adaptation to incremental alterations as judged by after-effects tested immediately after training. In a recent study on force-field adaptation in reaching, Malfait and Ostry (2004) showed that the transfer of learning across arms observed after a force-field is introduced suddenly (Criscimagna-Hemminger et al 2003) is not observed when the force-field is introduced incrementally. Malfait and Ostry suggest that the transfer of learning observed when the field is introduced suddenly may be primarily the result of a cognitive strategy that arises as a result of the sudden introduction of load and associated kinematic error. All three of these studies point to differences in the way in which people adapt to incremental and sudden perturbations. However, none examined the implications for longer-term retention or consolidation of learning.
The aim of the present study was to determine whether people can retain learning of kinematic and dynamic sensorimotor transformations that are introduced gradually and whether they can recall this learning when they subsequently encounter the same transformation at full strength. Although people clearly adapt to incremental transformations (Wolpert et al 1995; Kagerer et al 1997; Ingram et al 2000; Malfait and Ostry 2004), it is not known whether people will retain this learning for an extended period of time. In addition to acquiring new internal models, the CNS must constantly update and calibrate existing internal models (Johansson 1998; Wolpert and Kawato 1998). A key question is: when, and under what conditions, does the CNS create a new internal model as opposed to adapting an existing model? It is possible that large and clearly detectable movement errors, associated with sudden perturbations, may be important for the formation of a new internal model. If so, then people may not store a distinct internal model for transformations introduced incrementally. That is, following adaptation to an incremental sensorimotor transformation, people may simply de-adapt during the course of their everyday activities and retain no knowledge of the transformation.
In the context of a center-out-and-back reaching task, four groups of subjects adapted to either a visuomotor rotation of perceived hand position (kinematic perturbation) or a velocity-dependent force-field applied to the hand (dynamic perturbation), applied either instantaneously or incrementally. All groups were then tested the next day on the full strength version of the perturbation they experienced a day earlier. Based on previous work, we expected subjects in the instantaneous groups to learn and recall the kinematic (Krakauer et al 1999; Wigmore et al 2002) or dynamic (Brashers-Krug et al 1996; Krakauer et al 1999) perturbation. The main question of interest was whether participants in the incremental groups would also be able to learn and recall these perturbations. A positive outcome would suggest that large performance errors are not critical for the formation and subsequent recall of internal models for novel sensorimotor transformations. On the other hand, a negative outcome would suggest that people do not form new internal models in the absence of large movement errors and that adaptation to gradual perturbations is transitory.
Methods
Participants
Thirty-two university students participated in this study, approved by a local ethics committee, after providing informed consent, and they received course credit for participating. All participants were right-handed and had normal or corrected-for-normal vision. These participants were randomly assigned to one of four groups, with eight in each group. Two groups experienced a kinematic perturbation (visuomotor rotation) and two experienced a dynamic perturbation (rotary viscous force-field). In one group of each of these pairs the perturbation was gradually increased across trials (incremental groups), whereas in the other the perturbation was introduced at full strength right from the start (instantaneous group). The data from two participants were later discarded because they failed to perform the experiment according to instructions. One of these participants was from the instantaneous kinematic group and the other was from the incremental dynamic group.
Materials
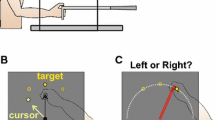
In the kinematic perturbation experiments, participants sat at a glass-topped table with their right arm supported and secured in a horizontal plane by a lightweight brace mounted on air pucks (Fig. 1a). The air pucks, connected to a compressed air supply via flexible plastic tubing, floated on a cushion of air and allowed near-frictionless motion across the tabletop. An electromagnetic position sensor (Ascension Technologies, Burlington, VT) recorded the position of the hand in the horizontal plane. The sensor was attached to the bottom of the brace directly below the center of the hand. A Dell Pentium III computer running specialized software written in LabVIEW (National Instruments Inc., Austin, TX, USA) was used for stimulus presentation and data collection.

Experimental set-ups. A two-dimensional visual projection system was used to present targets and provide visual feedback of hand position in a horizontal plane. Participants could not see their hand. In the kinematic perturbation experiment a, the arm was supported by air sleds. In the dynamic perturbation experiment b, participants moved a manipulandum through which velocity-dependent rotary forces were applied
In the dynamic perturbation experiments (Fig. 1b), seated participants grasped a lightweight, force-reflecting manipulandum (Phantom Haptic Interface 3.0 L, Sensable Technologies, Woburn, MA, USA). The three-dimensional force exerted by the manipulandum on the hand was servo-controlled at 1000 Hz. Three optical encoders, placed on the three motors of the robot, measured the position of the manipulandum handle and hand at 500 Hz.
In both the kinematic and dynamic perturbation experiments, a two-dimensional visual projection system was used to provide visual feedback of hand position, in the form of a cursor, and targets in the horizontal plane in which hand movements took place. This involved projecting an image onto a screen located above the plane of motion, that participants viewed in a semi-silvered mirror located midway between the screen and the plane of hand motion. Participants could not see their hand. In the dynamic perturbation experiment, to ensure that subjects moved the hand in the correct horizontal plane, we created two force boundaries 5 cm above and below the plane of motion. These boundaries generated only light resistance—1 N when the hand passed through in either direction—and provided haptic feedback about vertical hand position. Before the experiment, subjects performed 32 practice trials without the force-field and thereafter rarely contacted either plane during the experimental trials. Subjects in the kinematic perturbation experiment also received 32 practice trials without the visuomotor rotation so that they were familiar with the apparatus and task.
Procedure
Participants made out-and-back reaching movements to one of eight targets from a central start position located at about 10 cm below the shoulder in the subject’s mid-saggital plane. The targets and start position were circles of diameter 1 cm. The targets were located radially 15 cm from the start position and in the same horizontal plane. Targets were presented in a constant sequence, starting at 0° (to the subject’s right) and continuing in positive, counterclockwise increments of 45°. A cycle was defined as eight successive trials from 0° to 315°. To begin each trial, participants positioned the circular cursor (diameter 1 cm) representing their hand position at the start position. A trial was initiated only when the hand is within the start area for 500 ms. At the start of the trial, one of the targets was presented and the participant was required to move out to the target and back to the start position in a single motion without making corrections during the movement. To control movement time, a time counter was initiated as soon as the hand moved 2 cm away from the start position. After 450 ms, an auditory signal (beep) was provided and the color of the start position changed momentarily. The subjects’ task was to arrive back at the start at the time of the beep and color change.
The kinematic perturbation consisted of a visuomotor rotation of the cursor representing hand position about the start position in the horizontal plane. For the incremental group, on day 1 the rotation angle was gradually increased from 0 to 30° over 240 trials in increments of 0.125° per trial. The rotation angle was then held at 30° for an additional 40 trials. These participants were then tested a day later with the rotation angle set at 30° for 240 trials. The instantaneous group of participants completed 240 trials on both days 1 and 2 with the rotation angle set at 30° for all trials on both days. The dynamic perturbation consisted of a velocity-dependent rotary force-field where the force applied to the hand by the manipulandum handle was proportional to the speed of the hand and directed perpendicular to the hand velocity vector (the current direction of hand movement) such that the force tended to rotate the hand counterclockwise.
The structure of the dynamic learning experiments was similar to that of the visuomotor learning experiments. In the incremental group, the viscosity of the force-field (the coefficient relating hand velocity to rotary force applied to the hand) was gradually increased from 0 to 6 N/m/s over 240 trials in increments of 0.025 N/m/s. The viscosity was then held constant at 6 N/m/s for 40 more trials. A day later, these participants performed an additional 240 trials with the viscosity set at 6 N/m/s in all trials. Participants in the instantaneous group performed 240 trials on days 1 and 2 with the viscosity set at 6 N/m/s in all trials and on both days.
In both the kinematic and dynamic perturbation experiments, participants in the incremental group performed more trials on day 1 (280) than those in the instantaneous group (240). On the other hand, participants in the instantaneous group performed far more trials (240) under the full strength perturbation than did those in the incremental group (40). The choice of 240 trials for the instantaneous group was based on previous studies showing that this number is sufficient to yield asymptotic adaptation. The choice of 240 gradually increasing and 40 full strength trials for the incremental group was somewhat arbitrary; however, we were seeking a trade off between total number of trials and trials under the full perturbation. As will be shown below, we observed similar levels of adaptation in the instantaneous and incremental groups on day 1.
Data analysis
Different dependent variables were used to quantify performance under the kinematic and dynamic transformations, because the two transformations tend to perturb the trajectory of the hand in different ways. To quantify performance under the visuomotor rotation, the position of the “hand” cursor 150 ms after the start of the movement was determined. The directional error—the angle between a vector from the start position to this cursor position and a vector from the start position to the target—was then computed. The cursor position at 150 ms after the start of the movement was used to ensure that movement direction was measured before it was possible to make significant on-line corrections based on visual feedback of hand position. The start of the movement was taken as the point at which the tangential velocity of the hand last exceeded 10 cm/s before reaching a speed of 40 cm/s. To quantify performance under the velocity-dependent rotary force-field, we used the area enclosed by the path of the hand in the horizontal plane when the first and last points of the path are joined. This hand path area captures the loopiness in the hand path that results when a viscous rotary force-field is introduced at full strength (see Tong et al 2002; Fig. 3a).
In both the kinematic and dynamic perturbations, we also computed the peak displacement of the hand paths away from the start position and the peak hand velocity observed during the outward movement to the target. Both between-subjects and within-subjects ANOVAs were used to examine retention of learning across day (see “Results” section). An alpha level of 0.05 was used for all statistical analyses.
Results
Adaptation of hand paths
Figure 2 shows hand paths from two representative subjects from the instantaneous and incremental kinematic perturbation groups. For each subject, hand paths to all eight targets are shown for the first and the thirtieth cycles on day 1 and the first cycle on day 2. As expected, when the 30° visuomotor rotation was introduced instantaneously (Fig. 1a), large directional errors were observed in the first cycle. More specifically, the hand paths were rotated counterclockwise with reference to the target position. However, these errors reduced dramatically by the end of day 1. When the same subject was tested the next day, small directional errors were observed on the first cycle but they were appreciably smaller than the initial errors on day 1. As expected, when the visuomotor rotation was introduced gradually, directional errors on day 1 were small in both the first and thirtieth cycles (see Fig. 2b). When the same subject was tested a day later, only small directional errors were seen. This indicates that this subject, like the representative subject from the instantaneous group, retained learning of the visuomotor rotation from day 1.

Performance in the first and thirtieth cycles on day 1 and the first cycle on day 2 when the –30° visuomotor rotation was introduced either instantaneously (a) or incrementally (b) on day 1. The black and gray curves show individual paths of the cursor representing hand position for a single subject (different subjects are shown in a and b). The straight solid lines indicate the directions and extents of the corresponding targets. The eight paths for each cycle are shown in four pairs of paths. The two movement paths in each pair are directed to opposing targets and are colored black and gray so that they can be distinguished visually
Figure 3 shows hand paths for a representative participant from the instantaneous dynamic group (Fig. 3a) and a representative participant from the incremental dynamic perturbation group (Fig. 3b). For each participant, hand paths to all eight targets are shown for the first and the thirtieth cycles on day 1 and the first cycle on day 2. As expected, large distortions of the hand paths were observed in the first cycle of day 1 when the perturbation was introduced instantaneously. (Note that the velocity-dependent rotary force-field initially causes the hand path to be curved or “loopy” but does not alter the overall direction of the path. In contrast, the visuomotor rotation alters the direction of the hand path but the path still tends to be straight.) However, after 30 cycles, participants adapted so as to generate nearly straight-line hand paths similar to those observed in unperturbed movements (Morasso 1981; Flash and Hogan 1985). When tested the next day, these participants clearly retained learning of the perturbation as judged by the nearly straight-line hand paths observed in the first cycle. Not surprisingly, when the perturbation was increased incrementally, nearly straight-line hand paths were observed in the first cycle (where the disturbing forces were close to zero). Slightly more distorted paths were observed in the thirtieth cycle but these were still nearly straight. When tested a day later, these participants produced relatively undisturbed hand paths in the first cycle and thus clearly learned and retained knowledge of the perturbation.

Performance in the first and thirtieth cycles on day 1 and the first cycle on day 2 when the velocity-dependent rotary force-field was introduced either instantaneously (a) or incrementally (b) on day 1. The curve traces show individual hand paths for single subjects (different subjects are shown in a and b). The straight solid lines indicate the direction and extent of the corresponding targets
Retention of learning
To assess adaptation and retention of learning across subjects, we first computed the median directional error (kinematic perturbation) or path area (dynamic perturbation) for each cycle and subject and then determined the mean error (kinematic transformation) or area (dynamic transformation), averaged across subjects, for each cycle. (Medians were used to guard against outlying data points. However, very similar results were obtained when means per cycle were used.) Figure 4a shows mean directional error as a function of cycle for both day 1 and day 2 performances of the instantaneous and incremental kinematic groups. Figure 4b shows mean path area as a function of cycle for both day 1 and day 2 performances of the instantaneous and incremental dynamic groups. In both plots, the height of the same colored lines above and below each curve represents 1 SE.

Adaptation as a function of cycle. The curves in a show mean directional error as a function of cycle for the instantaneous and increment kinematic groups on days 1 and 2. The curves in b show mean path areas as a function of cycle for the instantaneous and increment kinematic groups on days 1 and 2. The height of the lines above and below each curve represents 1 SE
On day 1, participants in the instantaneous kinematic group initially produced substantial directional errors close to 30°. This error decreased as a function of cycle, with the rate of decrease slowing over cycles, and appeared to reach an asymptote of about 5° after 30 cycles. The initial performance for this group was clearly smaller on day 2 than on day 1, and decreased markedly after the first cycle to a level similar to that observed at the end of training on day 1. The directional error then decreased slightly over the remainder of the cycles. Thus clear retention of the visuomotor rotation across days was observed for this group. The incremental kinematic group showed small directional errors at the beginning of day 1. As the magnitude of the rotation was gradually increased across trials, the directional error increased slightly and, by the end of training, was similar to the error observed for the instantaneous group at the end of training on day 1. For the incremental group, the initial error on day 2 was greater than that on day 1 but was clearly smaller than the initial day 1 error observed in the instantaneous group. Indeed, very similar curves were observed on day 2 for the instantaneous and incremental groups. Therefore, participants in the incremental group clearly retained their knowledge of the rotation. In the very first cycle on day 2, the incremental group exhibited a slightly larger error than the instantaneous group. This suggests that subjects in the instantaneous group may have recalled knowledge of the transformation more quickly than subjects in the incremental group. However, by the second cycle, the two groups produced similar errors (see below).
A similar pattern of results was observed in the dynamic perturbation experiment (compare Fig. 4a,b). On day 1, participants in the instantaneous group produced hand path areas that were initially large but then decreased across cycles. The next day, these participants produced initial hand paths errors that were smaller than those observed on day 1. The performance at the end of day 2 was similar to the final performance at the end of day 2. Thus, the participants in this group showed clear retention of learning across days but did not appear to improve on their final day 1 performance. Participants in the incremental dynamic group initially produced very small hand path areas on day 1. As the strength of the force-field gradually increased, so did the area of the hand paths, such that performance at the end of day 1 was similar for this group and the instantaneous group. The initial day 2 errors of the incremental group were clearly smaller that the initial day 1 errors of the instantaneous group, demonstrating clear retention of learning of the force-field. Indeed, the initial hand path area on day 2 was, if anything, smaller in the incremental group than in the instantaneous group.
To quantify performance under the kinematic perturbation, we computed the average directional error over the second and third cycles as well as over the last two cycles. We then averaged these values across subjects to obtain mean values. We will refer to these mean values as the initial and final performance. (Note that we chose to exclude the first cycle because participants may require several movements to recognize the context they are in and recall what they may have learned—see Krakauer et al 1999; Wigmore et al 2002; Tong and Flanagan 2003). Similarly, to quantify performance under the dynamic perturbation, we computed the average hand path areas over the second and third cycles and over the last two cycles. For both the kinematic and dynamic perturbation experiments, we also computed the average peak hand velocity (during the outward movement) and the average peak displacement of the hand from the start position over the second and third cycles and over the last two cycles.
Figure 5a shows the initial (plain bars) and final (striped bars) directional errors for the instantaneous (white) and incremental (gray) kinematic groups on days 1 and 2. For the instantaneous group, the initial directional error on day 2 (M=4.74°, SD=3.35°) was significantly smaller (F(1,6)=123.72, p<0.001) than on day 1 (M=18.9°, SD=4.41°). This indicates that participants in the instantaneous group were able to learn the visuomotor rotation and recall it when tested the next day. Similar learning and retention was observed in the incremental group. Specifically, the initial directional error on day 2 in the incremental group (M=5.69°, SD=2.11°) was reliably smaller than the initial directional error on day 1 in the instantaneous group (F(1,13)=57.32, p<0.001). The level of learning and retention was similar in the instantaneous and incremental groups; no significant difference was observed between the initial day 2 directional errors for these two groups (F(1,13)=0.45, p=0.514). As noted above, the directional error in the incremental group appeared to increase slightly over cycles on day 1 (see Fig. 4a). To assess whether this increase was reliable, the initial directional error (M=2.20°, SD=3.59°) was compared with the final directional error (M=6.23°, SD=1.88°). A significant effect was found (F(1,7)=6.95, p=0.034). However, the final day 1 directional error for the incremental group was not reliably different (F(1,13)=3.32, p=0.009) than that observed for the instantaneous group (M=4.47°, SD=1.85°). Thus, comparable levels of adaptation were observed in the two groups on day 1.

Initial (plain bars) and final (striped bars) performance on days 1 and 2 for the kinematic (a–c) and dynamic (d–f) instantaneous (white bars) and incremental (gray bars) perturbation groups. The height of each vertical line represents 1 SE
Figure 5b and c show plots corresponding to Fig. 5a for peak hand velocity and maximum hand displacement, respectively. A two-way ANOVA was used to assess the effects of day (1 and 2) and group (instantaneous and incremental) on the initial peak velocity. We observed significant effects for day (F(1,13)=29.60, p<0.001) and group (F(1,13)=4.84, p=0.047) but no reliable interaction between day and group was observed (F(1,13)=0.49, p=0.497). As shown in Fig. 5b, on average, the initial velocity was greater on day 2 than on day 1 and was greater for the incremental group than the instantaneous group. A similar ANOVA was conducted to assess the effects of peak displacement. No significant effects were found for group (F(1,13)=0.00, p=0.979) or day (F(1,13)=0.17, p=0.686), nor was there an interaction between group and day (F(1,13)=3.40, p=0.088).
Figure 5d shows the initial and final hand path areas for the instantaneous and incremental dynamic groups on days 1 and 2. Participants in the instantaneous group produced initial hand path areas that were significantly smaller (F(1,7)=14.80, p=0.006) on day 2 (M=7.46 cm2, SD=1.71 cm2) than on day 1 (M=10.77 cm2, SD=2.66 cm2). This result indicates that these participants were able to learn the transformation and recall it when tested the next day. Participants in the incremental group were similarly able to learn and retain knowledge of the force-field. Their initial path area on day 2 (M=5.45 cm2, SD=0.68 cm2) was reliably smaller than that of the instantaneous group on day 1 (F(1,13)=26.268, p<0.001). Unlike in the kinematic condition, here we found a significant difference between the instantaneous and incremental groups’ initial day 2 performance (F(1,13)=4.856, p=0.012). Experiencing the dynamic perturbation gradually and without awareness appeared to promote slightly better retention than when the perturbation was experienced instantaneously. To determine whether the gradual increase in hand path area over cycles observed in the incremental group on day 1 was significant, the initial performance (M=3.06 cm2, SD=0.60 cm2) was compared with the final performance (M=5.23 cm2, SD=0.78 cm2). This effect was reliable (F(1,6)=88.46, p<0.001). However, the final day 1 directional errors for the incremental group and instantaneous group (M=5.74 cm2, SD=1.73 cm2) were not significantly different (F(1,13)=0.51, p=0.49). Thus, the levels of adaptation observed in the two groups on day 1 were similar.
Mean initial and final peak hand velocities and peak hand displacements are plotted in Fig. 5e and f. We conducted a two-way ANOVA to assess the effects of day (1 and 2) and group (instantaneous and incremental) on the initial peak velocity. We observed a significant effect for day (F(1,13)=12.69, p=0.003). However, neither the effect for group (F(1,13)<0.001, p=0.989) nor interaction between day and group (F(1,13)=0.02, p=0.896), were reliable. A similar ANOVA was carried out for peak hand displacement. We found a reliable effect for group (F(1,13)=5.48, p=0.036), but we did not observe reliable effects for day (F(1,13)=3.40, p=0.088) or the interaction between group and day (F(1,13)=0.99, p=0.338). As shown in Fig. 5f, the instantaneous group produced slightly larger hand displacements than the incremental group.
Discussion
In agreement with previous findings, we observed that participants could learn and recall kinematic (Krakauer et al 1999; Wigmore et al 2002) and dynamic (Brashers-Krug et al 1996; Krakauer et al 1999) perturbations that were introduced instantaneously. We also found support for our hypothesis that similar learning and recall would be observed when the perturbations were introduced incrementally. The latter finding indicates that large performance errors are not required for the creation and subsequent recall of internal models of sensorimotor transformations.
Previous studies have compared the effects of incremental and sudden perturbations on sensorimotor motor adaptation. Using a target-directed pointing task in which subjects received feedback of target and hand positions on a screen, Kagerer et al (1997) examined adaptation to visuomotor rotations introduced either incrementally or suddenly. In the sudden condition, the rotation was set to 90° for ten blocks of 60 trials, whereas in the incremental condition the rotation increased from 0° to 90° in steps of 10° each block. These researchers found that adaptation was better in the incremental condition, as judged by after-effects observed when the rotation was removed immediately after the training period. Using a pointing task in which subjects received visual feedback of terminal hand position, Ingram et al (2000) examined adaptation to gradual and immediate gain changes that altered the mapping between perceived and actual hand position. In the immediate condition, the gain was set to 1.5 for all 80 training trials, whereas in the gradual condition the gain was incrementally increased to 1.5 across the 80 trials. These authors also found more complete adaptation to the gradual perturbation, as revealed by stronger after-effects in trials without visual feedback that immediately followed the training trials. Given these previous results, one might expect that subjects in our incremental kinematic group would show better retention of learning on day 2 than subjects in our instantaneous kinematic group. However, we did not observe a difference in retention between these two groups. This discrepancy between our study and the two previous studies cannot be easily explained by differences in the total number of training trials or the number of full-strength training trials experienced in the incremental condition. In the previous studies (Kagerer et al 1997; Ingram et al 2000), the incremental and sudden perturbation groups performed the same number of training trials whereas, in the current study, the incremental groups performed a greater number of trials on day 1 than the instantaneous groups did. Thus, if anything we would expect an advantage for our incremental group in terms of retention. Moreover, although the 40 full-strength trials included at the end of our incremental training period is slightly less in number than in the Kagerer et al (1997) study (60 trials), it is greater than the number in the Ingram et al (2000) study (one trial). It is of course possible that, had we run more subjects, a significant difference between the kinematic incremental and instantaneous groups would have emerged. However, we note that the number of subjects in each of our groups (N=8) is larger than in either of the two previous studies. Thus, the statistical power in our experiment was at least on par with the previous work. Given these considerations, it seems reasonable to suggest that differences in adaptation to incremental and sudden perturbations, measured immediately after training, may not be always be apparent when retention of learning is assessed 24 h later. However, we should keep in mind that we did observe better retention of learning in the incremental dynamic condition compared to the instantaneous dynamic condition. In any event, we would emphasize the novel contribution of the current paper, which is that adaptation to incremental sensorimotor transformations is clearly retained in motor memory following a 24 h period in which subjects carried on with their daily lives.
In both the kinematic and dynamic perturbation experiments, we found that initial peak hand velocity (the average velocity over the second and third cycles) was slightly but reliably greater on day 2 than on day 1. This increase in velocity may be due to general learning of the task as a whole, including learning to time movements more accurately with respect to the visual and auditory cues provided. Because the dynamic perturbation was velocity-dependent, this indicates that, on average, the magnitude of the perturbation was greater on day 2. Thus, the retention of learning observed for both the instantaneous and incremental dynamic groups cannot be explained by a reduction of the size of the perturbation. Indeed, if anything, we may have underestimated the degree to which learning was retained. In the case of the kinematic perturbation experiment, it is unlikely that the increase in velocity on day 2 could explain the retention of learning observed in both the instantaneous and incremental groups. More specifically, it is unlikely that our measure of performance—directional error—would have been affected by small changes in movement speed, because this error was determined early in the movement (150 ms after movement onset), before participants could adjust the direction of hand movement based on visual feedback of hand movement. In assessing initial peak hand displacement (the average displacement over the second and third cycles), we found no main effect of day (1 vs. 2) or interactions between day and group (incremental versus instantaneous) in either the kinematic or dynamic perturbation conditions. Therefore, we can conclude that the improved initial performance observed on day 2 for all groups is not simply a result of decreasing movement displacement. This is important for the dynamic perturbation groups, because hand path area could be affected by hand displacement.
There is strong evidence that, when adapting to force-fields and visuomotor rotations introduced suddenly, subjects form new internal models that can be recalled at a later time (Brashers-Krug et al 1996; Shadmehr and Brashers-Krug 1997; Conditt et al 1997; Krakauer et al 1999; Caithness et al 2004). It is clear that these internal models are linked to the particular task and environment in which they were acquired. For example, after adapting to a force-field or visuomotor rotation introduced suddenly, subjects do not exhibit after-effects in their reaching movement once they let go of the manipulandum and step away from the apparatus. Moreover, performing everyday movements in the hours, days, or even weeks following adaptation does not interfere with retention of learning when subjects are retested in the same task and environment. A priori, it was not obvious to us that adaptation to incrementally-introduced force-fields and visuomotor rotations would be similarly linked to the specific task and environment. That is, in the absence of large and clearly detectable movement errors, subjects may not have associated the changes in motor output required to perform the task with the task and task environment. Had this been the case, then the performance of everyday reaching movements, following adaptation, would have de-adapted the subjects and interfered with retention. However, our results clearly show that retention of learning did occur. Thus, we suggest that large movement errors are not required for the formation of internal models linked to specific tasks and task environments.
Previous studies have shown that subjects can adapt to incremental (Wolpert et al 1995) or very small (Jakobson and Goodale 1989) visuomotor perturbations without becoming aware of the perturbation. Thus, awareness of movement errors is not necessary for adaptation and may even hinder adaptation (Jakobson and Goodale 1989; Bedford 1999). When we debriefed our subjects at the end of the experiment, those in the incremental groups gave no indication of being aware of the perturbation, even though these ultimately resulted in rather large visuomotor rotations or forces applied to the hand. Although we only informally examined the issue of awareness, we would suggest that awareness is also not critical for retention of learning.
We found that subjects continuously and smoothly adapted to the incremental kinematic and dynamic perturbation (see Fig. 4). That is, we did not observe a mixture of corrective jumps and plateaus that might be expected if subjects waited until errors reached some threshold before adjusting to the perturbation. Similar smooth adaptation was observed in the study by Ingram et al (2000) in which they incrementally increased the gain between perceived and actual hand displacement. These observations suggest that the incremental changes we used were detectable at a sensorimotor level.
In conclusion, we have shown that subjects retain knowledge of novel sensorimotor transformations when these are introduced incrementally. This result suggests that large and clearly detectable movement errors are not required for learning new internal models of such transformations.
References
Bedford FL (1999) Keeping perception accurate. Trends Cogn Sci 3:4–11
Bock O, Schneider S, Bloomberg J (2001) Conditions for interference versus facilitation during sequential sensorimotor adaptation. Exp Brain Res 138:359–365
Brashers-Krug T, Shadmehr R, Bizzi E (1996) Consolidation in human motor memory. Nature 382:252–255
Caithness G, Osu R, Bays P, Chase H, Klassen J, Kawato M, Wolpert DM, Flanagan JR (2004) Failure to consolidate the consolidation theory of learning for sensorimotor adaptation tasks. J Neurosci 24:8662–8671
Conditt MA, Gandolfo F, Mussa-Ivaldi FA (1997) The motor system does not learn the dynamics of the arm by rote memorization of past experiences. J Neurophysiol 78:554–560
Criscimagna-Hemminger SE, Donchin O, Gazzaniga MS, Shadmehr R (2003) Learned dynamics of reaching movements generalize from dominant to nondominant arm. J Neurophysiol 89:168–176
Cunningham HA, Welch RB (1994) Multiple concurrent visual-motor mappings: implications for models of adaptation. J Exp Psychol Hum Percept Perform 20:987–999
Flanagan JR, Wing AM (1997) The role of internal models in motion planning and control: evidence from grip force adjustments during movements of hand-held loads. J Neurosci 17:1519–1528
Flanagan JR, Nakano E, Imamizu H, Osu R, Yoshioka T, Kawato M (1999) Composition and decomposition of internal models in motor learning under altered kinematic and dynamic environments. J Neurosci 19:RC 34(1–5)
Flash T, Hogan N (1985) The coordination of arm movements: an experimentally confirmed mathematical model. J Neurosci 5:1688–1703
Goedert KM, Willingham DB (2002) Patterns of interference in sequence learning and prism adaptation inconsistent with the consolidation hypothesis. Learn Mem 9:279–292
Ingram HA, van Donkelaar P, Cole J, Vercher JL, Gauthier GM, Miall RC (2000) The role of proprioception and attention in a visuomotor adaptation task. Exp Brain Res 132:114–126
Jakobson LS, Goodale MA (1989) Trajectories of reaches to prismatically-displaced targets: evidence for “automatic” visuomotor recalibration. Exp Brain Res 78:575–587
Johansson RS (1998) Sensory input and control of grip. In: Glickstein M (ed) Sensory guidance of movement. Novartis Foundation Symposium, vol 218. Wiley, Chichester, UK, pp 45–59
Kagerer FA, Contreras-Vidal JL, Stelmach GE (1997) Adaptation to gradual as compared with sudden visuo-motor distortions. Exp Brain Res 115:557–561
Kawato M (1999) Internal models for motor control and trajectory planning. Curr Opin Neurobiol 9:718–727
Krakauer JW, Ghilardi MF, Ghez C (1999) Independent learning of internal models for kinematic and dynamic control of reaching. Nat Neurosci 2:1026–1030
Lackner JR, DiZio P (1994) Rapid adaptation to Coriolis force perturbations of arm trajectory. J Neurophysiol 72:299–313
Malfait N, Ostry DJ (2004) Is interlimb transfer of force-field adaptation a cognitive response to the sudden introduction of load? J Neurosci 24:8084–8089
Martin TA, Keating JG, Goodkin HP, Bastian AJ, Thach WT (1996) Throwing while looking through prisms. II. Specificity and storage of multiple gaze-throw calibrations. Brain 119:1199–1211
Morasso P (1981) Spatial control of arm movements. Exp Brain Res 42:223–227
Shadmehr R, Brashers-Krug T (1997) Functional stages in the formation of human long-term motor memory. J Neurosci 17:409–419
Shadmehr R, Mussa-Ivaldi FA (1994) Adaptive representation of dynamics during learning of a motor task. J Neurosci 14:3208–3224
Singh K, Scott SH (2003) A motor learning strategy reflects neural circuitry for limb control. Nat Neurosci 6:399–403
Tong C, Flanagan JR (2003) Task-specific internal models for kinematic transformations. J Neurophysiol 90:578–585
Tong C, Wolpert DM, Flanagan JR (2002) Kinematics and dynamics are not represented independently in motor working memory: evidence from an interference study. J Neurosci 22:1108–1113
Vetter P, Wolpert DM (2000) Context estimation for sensorimotor control. J Neurophysiol 84:1026–1034
Wigmore V, Tong C, Flanagan JR (2002) Visuomotor rotations of varying size and direction compete for a single internal model in motor working memory. J Exp Psychol Hum Percept Perform 28:447–457
Wolpert DM, Ghahramani Z (2000) Computational principles of movement neuroscience. Nat Neurosci 3:1212–1217
Wolpert DM, Kawato M (1998) Multiple paired forward and inverse models for motor control. Neural Netw 11:1317–1329
Wolpert DM, Ghahramani Z, Jordon MI (1995) Are arm trajectories planned in kinematic or dynamic coordinates? An adaptation study. Exp Brain Res 103:460–470
Acknowledgments
This work was supported by the Natural Sciences and Engineering Research Council of Canada and the Human Frontier Science Program.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Klassen, J., Tong, C. & Flanagan, J.R. Learning and recall of incremental kinematic and dynamic sensorimotor transformations. Exp Brain Res 164, 250–259 (2005). https://doi.org/10.1007/s00221-005-2247-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-005-2247-4