
Abstract
Consider the scattering of an incident wave by a rigid obstacle, which is immersed in a homogeneous and isotropic elastic medium in two dimensions. Based on a Dirichlet-to-Neumann (DtN) operator, an exact transparent boundary condition is introduced and the scattering problem is formulated as a boundary value problem of the elastic wave equation in a bounded domain. By developing a new duality argument, an a posteriori error estimate is derived for the discrete problem by using the finite element method with the truncated DtN operator. The a posteriori error estimate consists of the finite element approximation error and the truncation error of the DtN operator, where the latter decays exponentially with respect to the truncation parameter. An adaptive finite element algorithm is proposed to solve the elastic obstacle scattering problem, where the truncation parameter is determined through the truncation error and the mesh elements for local refinements are chosen through the finite element discretization error. Numerical experiments are presented to demonstrate the effectiveness of the proposed method.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
A basic problem in classical scattering theory is the scattering of time-harmonic waves by a bounded and impenetrable medium, which is known as the obstacle scattering problem. It has played a crucial role in diverse scientific areas such as radar and sonar, geophysical exploration, medical imaging, and nondestructive testing. Motivated by these significant applications, the obstacle scattering problem has been widely studied for acoustic and electromagnetic waves. Consequently, a great deal of results are available concerning its solution [18, 41, 42]. Recently, the scattering problems for elastic waves have received ever-increasing attention due to the important applications in seismology and geophysics [3, 38, 39]. For instance, they are fundamental to detect the fractures in sedimentary rocks for the production of underground gas and liquids. Compared with acoustic and electromagnetic waves, elastic waves are less studied due to the coexistence of compressional waves and shear waves that have different wavenumbers [16, 36].
The obstacle scattering problem is usually formulated as an exterior boundary value problem imposed in an open domain. The unbounded physical domain needs to be truncated into a bounded computational domain for the convenience of mathematical analysis or numerical computation. Therefore, an appropriate boundary condition is required on the boundary of the truncated domain to avoid artificial wave reflection. Such a boundary condition is called the transparent boundary condition (TBC) or non-reflecting boundary condition. It is one of the important and active subjects in the research area of wave propagation [6, 19,20,21,22,23,24]. Since Berenger proposed a perfectly matched layer (PML) technique to solve the time-dependent Maxwell equations [7], the research on the PML has undergone a tremendous development due to its effectiveness and simplicity. Various constructions of PML have been proposed and studied for a wide range of scattering problems on acoustic and electromagnetic wave propagation [5, 10, 15, 27, 30, 44]. The basic idea of the PML technique is to surround the domain of interest by a layer of finite thickness fictitious medium that attenuates the waves coming from inside of the computational domain. When the waves reach the outer boundary of the PML region, their values are so small that the homogeneous Dirichlet boundary conditions can be imposed.
A posteriori error estimates are computable quantities which measure the solution errors of discrete problems. They are essential in designing algorithms for mesh modification which aim to equidistribute the computational effort and optimize the computation. The a posteriori error estimates based adaptive finite element methods have the ability of error control and asymptotically optimal approximation property [2]. They have become a class of important numerical tools for solving differential equations, especially for those where the solutions have singularity or multiscale phenomena. Combined with the PML technique, an efficient adaptive finite element method was developed in [11] for solving the two-dimensional diffraction grating problem, where the medium has a one-dimensional periodic structure and the model equation is the two-dimensional Helmholtz equation. It was shown that the a posteriori error estimate consists of the finite element discretization error and the PML truncation error which decays exponentially with respect to the PML parameters such as the thickness of the layer and the medium properties. Due to the superior numerical performance, the adaptive PML method was quickly extended to solve the two- and three-dimensional obstacle scattering problems [10, 12] and the three-dimensional diffraction grating problem [4], where either the two-dimensional Helmholtz equation or the three-dimensional Maxwell equations were considered. Although the PML method has been developed to solve various elastic wave propagation problems in engineering and geophysics soon after it was introduced [14, 17, 25, 35], the rigorous mathematical studies were only recently done for elastic waves because of the complex of the model equation [8, 13, 33, 34].
As a viable alternative, the finite element DtN method has been proposed to solve the obstacle scattering problems [29, 32, 40], the diffraction grating problems [31, 45], and the open cavity scattering problem [47], respectively, where the transparent boundary conditions are used to truncate the domains. In this new approach, the layer of artificial medium is not needed to enclose the domain of interest, which makes is different from the PML method. The transparent boundary conditions are based on nonlocal Dirichlet-to-Neumann (DtN) operators and are given as infinite Fourier series. Since the transparent boundary conditions are exact, the artificial boundary can be put as close as possible to the scattering structures, which can reduce the size of the computational domain. Numerically, the infinite series need to be truncated into a sum of finitely many terms by choosing an appropriate truncation parameter N. It is known that the convergence of the truncated DtN map could be arbitrarily slow to the original DtN map in the operator norm. The a posteriori error analysis of the PML method cannot be applied directly to the DtN method since the DtN map of the truncated PML problem converges exponentially fast to the DtN map of the untruncated PML problem. To overcome this issue, a duality argument had to be developed to obtain the a posteriori error estimate between the solution of the scattering problem and the finite element solution. Comparably, the a posteriori error estimates consist of the finite element discretization error and the DtN truncation error, which decays exponentially with respect to the truncation parameter N. The numerical experiments demonstrate that the adaptive DtN method has a competitive behavior to the adaptive PML method. Recently, an interesting adaptive finite element method was developed for the diffraction grating problem [48]. The method combines the PML and few-mode DtN truncations so that those Fourier modes which cannot be well absorbed by the PML can pass through the boundary without reflections.
In this paper, we present an adaptive finite element DtN method and carry out its mathematical analysis for the elastic wave scattering problem. The goal is threefold: (1) prove the exponential convergence of the truncated DtN operator; (2) give a complete a posteriori error estimate; (3) develop an effective adaptive finite element algorithm. This paper significantly extends the work on the acoustic scattering problem [29], where the Helmholtz equation was considered. Apparently, the techniques differ greatly from the existing work because of the complicated transparent boundary condition associated with the elastic wave equation.
Specifically, we consider a rigid obstacle which is immersed in a homogeneous and isotropic elastic medium in two dimensions. The Helmholtz decomposition is utilized to formulate the exterior boundary value problem of the elastic wave equation into a coupled exterior boundary value problem of the Helmholtz equation. By using a Dirichlet-to-Neumann (DtN) operator, an exact transparent boundary condition, which is given as a Fourier series, is introduced to reduce the original scattering problem into a boundary value problem of the elastic wave equation in a bounded domain. The discrete problem is studied by using the finite element method with the truncated DtN operator. Based on the Helmholtz decomposition, a new duality argument is developed to obtain an a posteriori error estimate between the solution of the original scattering problem and the discrete problem. The a posteriori error estimate consists of the finite element approximation error and the truncation error of the DtN operator which is shown to decay exponentially with respect to the truncation parameter. The estimate is used to design the adaptive finite element algorithm to choose elements for refinements and to determine the truncation parameter N. Since the truncation error decays exponentially with respect to N, the choice of the truncation parameter N is not sensitive to the given tolerance. Numerical experiments are presented to demonstrate the effectiveness of the proposed method.
The paper is organized as follows. In Sect. 2, the elastic wave equation is introduced for the scattering by a rigid obstacle; a boundary value problem is formulated by using the transparent boundary condition; the corresponding weak formulation is discussed. In Sect. 3, the discrete problem is considered by using the finite element approximation with the truncated DtN operator. Section 4 is devoted to the a posteriori error analysis and serves as the basis of the adaptive algorithm. In Sect. 5, we discuss the numerical implementation of the adaptive algorithm and present two numerical examples to illustrate the performance of the proposed method. The paper is concluded with some general remarks and directions for future work in Sect. 6.
2 Problem formulation
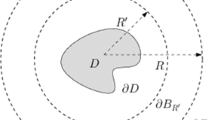
Consider a two-dimensional elastically rigid obstacle D with Lipschitz continuous boundary \(\partial D\), as seen in Fig. 1. Denote by \(\nu =(\nu _1, \nu _2)^\top \) and \(\tau =(\tau _1, \tau _2)^\top \) the unit normal and tangent vectors on \(\partial D\), where \(\tau _1=\nu _2\) and \(\tau _2=-\nu _1\). The exterior domain \({\mathbb {R}}^2{\setminus }{{\overline{D}}}\) is assumed to be filled with a homogeneous and isotropic elastic medium with a unit mass density. Let \(B_R=\{{\varvec{x}}=(x, y)^\top \in {\mathbb {R}}^2: |\varvec{x}|<R\}\) and \(B_{{\hat{R}}}=\{{\varvec{x}}\in {\mathbb {R}}^2: |{\varvec{x}}|<{\hat{R}}\}\) be the balls with radii R and \({\hat{R}}\), respectively, where \(R>{\hat{R}}>0\). Denote by \(\partial B_R\) and \(\partial B_{{\hat{R}}}\) the boundaries of \(B_R\) and \(R_{{\hat{R}}}\), respectively. Let \({\hat{R}}\) be large enough such that \({{\overline{D}}}\subset B_{{\hat{R}}}\subset B_R\). Denote by \(\Omega =B_R{\setminus }{{\overline{D}}}\) the bounded domain where the boundary value problem will be formulated.

Schematic of the elastic wave scattering problem
Let the obstacle be illuminated by an incident wave \({\varvec{u}}^{\mathrm{inc}}\), which can be either a point source or a plane wave. The displacement of the total field \({\varvec{u}}\) satisfies the two-dimensional elastic wave equation
where \(\omega >0\) is the angular frequency and \(\lambda , \mu \) are the Lamé constants satisfying \(\mu>0, \lambda +\mu >0\). Since the obstacle is assumed to be rigid, the displacement of the total field vanishes on the boundary of the obstacle, i.e.,
The scattered field is defined as \({\varvec{u}}^s={\varvec{u}}-{\varvec{u}}^{\mathrm{inc}}\) and it is required to satisfy the Kupradze–Sommerfeld radiation condition
where
are the compressional and shear wave components of \({\varvec{u}}^s\), respectively. Here
are knowns as the compressional wavenumber and the shear wavenumber, respectively. Clearly we have \(\kappa _1<\kappa _2\) since \(\mu>0, \lambda +\mu >0\). Given a vector function \({\varvec{u}}=(u_1, u_2)^\top \) and a scalar function u, the scalar and vector curl operators are defined by
For any solution \({\varvec{u}}\) of (2.1), we introduce the Helmholtz decomposition
where \(\phi , \psi \) are called the scalar potential functions. Substituting (2.4) into (2.1), the corresponding potential functions \(\phi ^s, \psi ^s\) for the scattered field \({\varvec{u}}^s\) satisfy the Helmholtz equations
Taking the dot product of (2.2) with \(\nu \) and \(\tau \), respectively, we get
where \(f_1=-{\varvec{u}}^{\mathrm{inc}}\cdot \nu \) and \(f_2=-{\varvec{u}}^{\mathrm{inc}}\cdot \tau \).
In addition, the potential functions \(\phi ^s, \psi ^s\) satisfy the Sommerfeld radiation conditions
By the Helmholtz decomposition, it can be shown that the boundary value problems (2.1)–(2.3) and (2.5)–(2.7) are equivalent. The result is stated in the following lemma and the proof can be found in [38].
Lemma 2.1
Let \({\varvec{u}}^s\) be the scattered field corresponding to the solution of the boundary value problem (2.1)–(2.3). Then \(\phi ^s=-\kappa _1^{-2}\nabla \cdot {\varvec{u}}^s, \psi ^s=\kappa _2^{-2}\mathrm{curl}{\varvec{u}}^s\) are the solutions of the coupled boundary value problem (2.5)–(2.7). Conversely, if \(\phi ^s, \psi ^s\) are the solutions of the boundary value problem (2.5)–(2.7), let \({\varvec{u}}^s =\nabla \phi ^s+\mathbf{curl}\psi ^s\), then \({\varvec{u}}={\varvec{u}}^s+{\varvec{u}}^{\mathrm{inc}}\) is the solution of the boundary value problem (2.1)–(2.3).
Denote by \(L^2(\Omega )\) the usual Hilbert space of square integrable functions. Let \(H^1(\Omega )\) be the standard Sobolev space equipped with the norm
Define \(H^1_{\partial D}(\Omega )=\{u\in H^1(\Omega ): u=0 \text { on }\partial D\}\). For any function \(u\in L^2(\partial B_R)\), it admits the Fourier series expansion
The trace space \(H^s(\partial B_R), s\in {\mathbb {R}}\) is defined by
where \(H^s(\partial B_R)\) norm is given by
Let \({\varvec{H}}^1(\Omega )=H^1(\Omega )^2\) and \(\varvec{H}^1_{\partial D}(\Omega )=H^1_{\partial D}(\Omega )^2\) be the Cartesian product spaces equipped with the corresponding 2-norms of \(H^1(\Omega )\) and \(H^1_{\partial D}(\Omega )\), respectively. Throughout the paper, we take the notation of \(a\lesssim b\) to stand for \(a\le C b\), where C is a positive constant whose value is not required but should be clear from the context.
The elastic wave scattering problem (2.2)–(2.3) is formulated in the open domain \({\mathbb {R}}^2{\setminus }{{\overline{D}}}\), which needs to be truncated into the bounded domain \(\Omega \). An appropriate boundary condition is required on \(\partial B_R\).
Define a boundary operator on \(\partial B_R\) as follows
where \({\varvec{e}}_r\) is the unit outward normal vector on \(\partial B_R\). It is shown in [38] that the scattered field \({\varvec{u}}^s\) satisfies the transparent boundary condition on \(\partial B_R\):
where \({\mathscr {T}}\) is called the Dirichlet-to-Neumann (DtN) operator and \(M_n\) is a \(2\times 2\) matrix whose entries are given in (A.4) and (A.6). By a simple calculation, the total field \({\varvec{u}}\) satisfies the transparent boundary condition
where \({\varvec{g}}:={\mathscr {B}}{\varvec{u}}^\mathrm{inc}-{\mathscr {T}}{\varvec{u}}^{\mathrm{inc}}\).
Based on the transparent boundary condition (2.9), the variational problem for (2.1)–(2.3) is to find \({\varvec{u}}\in {\varvec{H}}_{\partial D}^{1}(\Omega )\) such that
where the sesquilinear form \(b: {\varvec{H}}_{\partial D}^1(\Omega )\times {\varvec{H}}_{\partial D}^1(\Omega )\rightarrow {\mathbb {C}}\) is defined as
Here \(A:B=\mathrm{tr}(AB^\top )\) is the Frobenius inner product of square matrices A and B.
Following [38], we may show that the variational problem (2.10) has a unique weak solution \({\varvec{u}}\in {\varvec{H}}_{\partial D}^1(\Omega )\) for any frequency \(\omega \) and the solution satisfies the estimate
It follows from the general theory in [1] that there exists a constant \(\gamma >0\) such that the following inf-sup condition holds
3 The discrete problem
In the variational problem (2.10), the DtN operator \({\mathscr {T}}\) is given as an infinite series. In computation, the infinite series needs to be truncated into a finite sum. Given a sufficiently large N, we define the truncated DtN operator
Hence \({\varvec{g}}\) also needs to be approximated as \({\varvec{g}}_N={\mathscr {B}}{\varvec{u}}^\mathrm{inc}-{\mathscr {T}}_N{\varvec{u}}^{\mathrm{inc}}\). Using (3.1), we have the truncated problem: find \({\varvec{u}}_N\in {\varvec{H}}_{\partial D}^1(\Omega )\) such that
where the sesquilinear form \(b_N:{\varvec{H}}_{\partial D}^1(\Omega )\times {\varvec{H}}_{\partial D}^1(\Omega )\rightarrow {\mathbb {C}}\) is defined as
Let us consider the discrete problem of (2.10) by using the finite element approximation. Let \({\mathcal {M}}_h\) be a regular triangulation of \(\Omega \), where h denotes the maximum diameter of all the elements in \({\mathcal {M}}_h\). For simplicity, we assume that the boundary \(\partial D\) is polygonal and ignore the approximation error of the boundary \(\partial B_R\), which allows us to focus on deducing the a posteriori error estimate. Thus any edge \(e\in {\mathcal {M}}_h\) is a subset of \(\partial \Omega \) if it has two boundary vertices.
Let \(\Omega _h:=\cup _{K\in {\mathcal {M}}_h} K\) and \(\tilde{\varvec{V}}_h\subset {\varvec{H}}^{1}(\Omega _h)\) be a conforming finite element space, i.e.,
where m is a positive integer and \(P_m(K)\) denotes the set of all polynomials of degree no more than m. Introduce an isoparametric-equivalent finite element space
where \({\varvec{F}} \in \tilde{{\varvec{V}}}_h\) is a one-to-one continuous mapping constructed in [37]. We refer to [9, 37] for more details about the construction and properties of \({\varvec{F}}\). The finite element approximation to the variational problem (2.10) is to find \({\varvec{u}}^h\in {\varvec{V}}_{h, \partial D}\) such that
where \({\varvec{V}}_{h,\partial D}=\{{\varvec{v}}\in \varvec{V}_h: {\varvec{v}}=0\text { on }\partial D\}\).
The truncated finite element approximation to the variational problem (3.2) is to find \(\varvec{u}_N^h\in {\varvec{V}}_{h, \partial D}\) such that
Following the argument in [28, 38], we may show that for sufficiently large N the variational problem (3.2) is well-posed. Moreover, for sufficiently small h, the discrete inf-sup condition of the sesquilinear form \(b_N\) may be established by following the approach in [43]. Based on the general theory in [1], the truncated variational problem (3.5) can be shown to have a unique solution \({\varvec{u}}_N^h\in {\varvec{V}}_h\). The details are omitted since our focus is the a posteriori error estimate.
4 The a posteriori error analysis
For any triangular element \(K\in {\mathcal {M}}_h\), we denote by \(h_K\) its diameter. Let \({\mathcal {B}}_h\) denote the set of all the edges of K. For any edge \(e\in {\mathcal {B}}_h\), let \(h_e\) be its length. For any interior edge e which is the common side of triangular elements \(K_1, K_2\in {\mathcal {M}}_h\), we define the jump residual across e as
where \(\varvec{\nu }_j\) is the unit outward normal vector on the boundary of \(K_j, j=1,2\). For any boundary edge \(e\subset \partial B_R\), we define the jump residual
For any triangular element \(K\in {\mathcal {M}}_h\), denote by \(\eta _K\) the local error estimator which is given by
where \({\mathscr {R}}\) is the residual operator defined by
For convenience, we introduce a weighted norm \(|\!\Vert \cdot |\!\Vert _{{\varvec{H}}^{1}(\Omega )}\) which is given by
It can be verified for any \({\varvec{u}}\in \varvec{H}^1(\Omega )\) that
which implies that the two norms \(\Vert \cdot \Vert _{\varvec{H}^1(\Omega )}\) and \(|\!\Vert \cdot |\!\Vert _{{\varvec{H}}^1(\Omega )}\) are equivalent.
Now we state the main result of this paper.
Theorem 4.1
Let \({\varvec{u}}\) and \({\varvec{u}}_N^h\) be the solutions of the variational problems (2.10) and (3.5), respectively. Then for sufficiently large N, the following a posteriori error estimate holds:
We point out that the a posteriori error estimate consists of two parts: the first part arises from the finite element discretization error; and the second part comes from the truncation error of the DtN operator. Apparently, the DtN truncation error decreases exponentially with respect to N since \(\hat{R}<R\).
In the rest of the paper, we shall prove the a posteriori error estimate in Theorem 4.1. First, we present the result on trace regularity for functions in \(H^1(\Omega )\). The proof can be found in [29].
Lemma 4.2
For any \(u\in H^{1}(\Omega )\), the following estimates hold:
Let \(\varvec{\xi }={\varvec{u}}-{\varvec{u}}_N^h\), where \({\varvec{u}}\) and \({\varvec{u}}_N^h\) are the solutions of the problems (2.10) and (3.5), respectively. Combining (4.1), (2.11), and (3.3), we have from straightforward calculations that
which is the error representation formula.
In the following, we discuss the four terms in (4.3) one by one. Lemma 4.5 presents the a posteriori error estimate for the truncation of the DtN operator on the scattered field \({\varvec{u}}^s\). Lemma 4.6 gives the a posteriori error estimate for the total field \({\varvec{u}}\) on both of the finite element approximation and DtN operator truncation.
Lemma 4.3
Let \(0<\kappa _1<\kappa _2\) and \(0<{\hat{R}}<R\). For sufficiently large |n|, the following estimate holds for \(j=1, 2\):
where \(H_n^{(1)}\) and \(H_n^{(2)}\) are the Hankel functions of the first and second kind with order n, respectively.
Proof
Since the Hankel functions of the first and second kind are complex conjugate to each other, we only need to show the proof for the Hankel function of the first kind.
Let \(J_n\) and \(Y_n\) be the Bessel functions of the first and second kind with order n, respectively. Since \(J_{-n}(z)=(-1)^n J_n(z), Y_{-n}(z)=(-1)^nY_n(z)\), it suffices to show the result for positive n. For a fixed \(z>0\), they admit the following asymptotic properties [46]:
Define \(S(z)=J_n(z)/Y_n(z)\). A simple calculation yields
and
It is easy to verify that
and
Combining the above estimates, we have for \(R>{\hat{R}}\) and \(\kappa _2>\kappa _1\) that
Define \(F(z)=Y_n(z R)/Y_n(z {\hat{R}})\). By the mean value theorem, there exits \(\xi \in (\kappa _1, \kappa _2)\) such that
Therefore,
which completes the proof. \(\square \)
Remark 4.4
In the proof of Lemma 4.3, we use the asymptotic properties of the Bessel functions (4.4) for the case when z is fixed and \(n\rightarrow \infty \). It is worth mentioning that the truncation number should be increased with respect to \(\kappa _2 R\) in order to keep the term \(Y_n(z)\) dominating in \(H_n^{(1)}(z)\), which is a technique issue. The result may be improved by making a more sophisticated analysis on the Bessel functions.
Lemma 4.5
Let \({\varvec{u}}^s\in {\varvec{H}}^1(\Omega )\) be the scattered field corresponding to the solution of the variational problem (2.10). For any \({\varvec{v}}\in \varvec{H}^1(\Omega )\), the following estimate holds:
Proof
Recalling the Helmholtz decomposition \(\varvec{u}^s=\nabla \phi ^s+\mathbf{curl}\psi ^s\), we have from the Fourier series expansions in (A.1) that
Comparing the Fourier coefficients of \({\varvec{u}}\) and \(\phi , \psi \) in the Helmholtz decomposition gives
where \(\alpha _{jn}, \Lambda _n\) is given in (A.5) and
By Lemma 4.3 and (A.7), we have
Similarly, it can be shown that
The details are omitted for brevity.
Combining the above estimates and Lemma A.1, we obtain
It follows from (A.6)–(A.7) that
Substituting (2.12) and (4.6) into (4.7) and using Lemma 4.2, we obtain
which completes the proof by noting that \(|n|\left( \frac{\hat{R}}{R}\right) ^{|n|}\) is decreasing for sufficiently large |n|.
\(\square \)
In Lemma 4.5, it is shown that the truncation error of the DtN operator on the scattered field decay exponentially with respect to the truncation parameter N. The result implies that N can be small in practice.
Lemma 4.6
Let \({\varvec{v}}\) be any function in \({\varvec{H}}_{\partial D}^{1}(\Omega )\), we have
Proof
For any function \({\varvec{v}}\) in \({\varvec{H}}_{\partial D}^{1}(\Omega )\) and \({\varvec{v}}^h\) in \({\varvec{V}}_{h, \partial D}\), we have
For any \({\varvec{v}}^h\in {\varvec{V}}_{h, \partial D}\), it follows from the integration by parts that
We take \({\varvec{v}}^h=\Pi _h {\varvec{v}}\in {\varvec{V}}_{h, \partial D}\), where \(\Pi _h\) is the Clément-type interpolation operator and has the following interpolation estimates (cf. [12]):
Here \({\tilde{K}}\) is the union of all the triangular elements in \({\mathcal {M}}_h\), which have nonempty intersection with the element K, and \({\tilde{K}}_e\) is the union of \(\{{\tilde{K}}: e\subset K\in {\mathcal {M}}_h\}\). It follows from the definitions of \({\varvec{g}}\) and \({\varvec{g}}_N\) that
By Lemma 4.5, we have
The proof is completed by combining the above estimates. \(\square \)
The following lemma is to estimate the last term in (4.3).
Lemma 4.7
For any \(\delta >0\), there exists a positive constant \(C(\delta )\) independent of N such that
Proof
Using (3.1), we get from a simple calculation that
Denote \(\hat{M}_n=(M_n+M_n^*)/2\). Then \(\Re \left( M_n\varvec{\xi }_n\right) \cdot \overline{\varvec{\xi }_n}=\big (\hat{M}_n\varvec{\xi } _n\big )\cdot \overline{\varvec{\xi }_n}\). It is shown in [38] that \(\hat{M}_n\) is negative definite for sufficiently large |n|, i.e., there exists \(N_0>0\) such that \(\big (\hat{M}_n\varvec{\xi }_n\big )\cdot \overline{\varvec{\xi } _n}\le 0\) for any \(|n|>N_0\). Hence
Here we define
Since the second part in (4.8) is non-positive, we only need to estimate the first part which consists of finite terms. Moreover we have
Consider the annulus
For any \(u\in H^{1}(B_R{\setminus }\overline{B_{\hat{R}}})\) and \(\delta >0\), it follows from the Cauchy–Schwarz inequality that
which gives
On the other hand, we have
Using (4.10)–(4.12), we have for any \(u\in H^{1}(B_R{\setminus } \overline{B_{{\hat{R}}}} )\) that
Therefore, combining (4.9) and (4.13) yields
which completes the proof. \(\square \)
To estimate the third term on the right hand side of (4.3), we consider the dual problem
It is easy to check that \({\varvec{p}}\) is the solution of the following boundary value problem
where \({\mathscr {T}}^*\) is the adjoint operator to the DtN operator \({\mathscr {T}}\). Letting \({\varvec{v}}=\varvec{\xi }\) in (4.14), we obtain
To evaluate (4.16), we need to explicitly solve system (4.15), which is very complicate due to the coupling of the compressional and shear wave components. We consider the Helmholtz decomposition to the boundary value problem (4.15). Let
where \(\xi _j, j=1, 2\) has the Fourier series expansion
Meanwhile, we assume that
Using the Fourier series expansions and the Helmholtz decomposition, we get
which shows that the Fourier coefficients \(\xi _{1n}, \xi _{2n}\) satisfy
Lemma 4.8
The system for the Fourier coefficients
has a unique solution given by
Proof
Denote
By the standard theory of the first order differential system, the fundamental solution \(\Phi _n(r)\) is
The inverse of \(\Phi _n\) is
Using the method of variation of parameters, we let
where the unknown vector \(C_n(r)\) satisfies
Using the boundary condition yields
which implies that \(C_n(R)=(0, 0)^\top \). Then
Combining (4.22) and (4.23), we have
Substituting \(C_n(r)\) into the general solution, we obtain
which completes the proof. \(\square \)
Let \({\varvec{p}}\) be the solution of the dual problem (4.15). Then \({\varvec{p}}\) satisfies the following boundary value problem in \(B_R{\setminus }{{\overline{B}}}_{\hat{R}}\):
Introduce the Helmholtz decomposition for \({\varvec{p}}\):
where \(q_j, j=1, 2\) admits the Fourier series expansion
Let \(\xi _{jn}, j=1, 2\) be the solution of the system (4.19). Consider the second order system for \(q_{jn}, j=1, 2\):
where \(c_1=-1/(\lambda +2\mu ), c_2=-1/\mu ,\) and \(\alpha _{jn}\) is given in (A.5). The boundary condition \(q'_{jn}(R)=\overline{\alpha _{jn}} q_{jn}(R)\) comes from (A.2), i.e., \(q_j\) satisfies the boundary condition
where \({\mathscr {T}}_j^*\) is the adjoint operator to the DtN operator \({\mathscr {T}}_j\).
Lemma 4.9
The boundary value problem (4.24) and the second order system (4.26) are equivalent under the Helmholtz decomposition (4.25).
Proof
It suffices to show if the Fourier coefficients \(q_{jn}\) satisfy the second order system (4.26), then \({\varvec{p}}=\nabla q_1+\mathbf{curl}q_2\) is the solution of (4.24).
In the polar coordinates, we let
It follows from the Helmholtz decomposition that
Using (4.27)–(4.28), we have from a straightforward calculation that
On the other hand, it is easy to verify that
where \(M_{ij}^{(n)}, i,j=1, 2\) are given in (A.4).
Using the boundary condition \(q'_{jn}(R)=\overline{\alpha _{jn}} q_{jn}(R)\), we get
and
Since \(q_{2n}\) satisfies the second order equation
we obtain from the boundary condition \(\xi _{2n}(R)=0\) that
Similarly, combining the equation
and the boundary condition \(\xi _{1n}(R)=0\), we have
Hence we prove that \(\mathscr {B}{\varvec{p}}={\mathscr {T}}^*{\varvec{p}}\) on \(\partial B_R\).
Moreover, we get from the Helmholtz decomposition that
which completes the proof. \(\square \)
Based on Lemma 4.8 and Lemma 4.9, we have the asymptotic properties of the solution to the dual problem (4.24) for large |n|.
Theorem 4.10
Let \({\varvec{p}}\) be the solution of (4.24) and admit the Fourier series expansion
For sufficient large |n|, the Fourier coefficients \(p_n^r, p_n^{\theta }\) satisfy the estimate
where \(\xi _n^r, \xi _n^\theta \) are the Fourier coefficients of \(\varvec{\xi }\) in the polar coordinates and are given in (4.18).
Proof
It follows from straightforward calculations that the second order systems (4.26) have a unique solution, which is given by
where
Taking the derivative of (4.29)–(4.30) with respect to r gives
Evaluating (4.29)–(4.30) and (4.31)–(4.32) at \(r=R\) and \(r={\hat{R}}\), respectively, we may verify that
It follows from the Helmholtz decomposition that
Evaluating (4.33) at \(r=R\), noting \(\beta '_{jn}(R)=\overline{\alpha _{jn}(R)}\) and \(q'_{jn}(R)=\overline{\alpha _{jn}(R)} q_{jn}(R)\), we obtain
where
Similarly, evaluating (4.33) at \(r={\hat{R}}\) and noting \(\beta '_{jn}({\hat{R}})=\overline{\alpha _{jn}({\hat{R}})}\) yield that
where
and
Solving (4.35) for \(q_{1n}({\hat{R}}), q_{2n}({\hat{R}})\) in terms of \(p_n^r({\hat{R}}), p_n^{r}({\hat{R}})\) gives
where
Substituting (4.36) into (4.34) yields
Following the proofs in Lemmas 4.5 and A.1, we may similarly show that for sufficiently large |n|
For fixed t and sufficiently large |n|, using (4.20) and (4.21), we may easily show
we get
and
Substituting the above estimates into (4.37), we obtain
which completes the proof. \(\square \)
Using Theorem 4.10, we may estimate the last term in (4.16).
Lemma 4.11
Let \({\varvec{p}}\) be the solution of the dual problem (4.24). For sufficiently large N, the following estimate holds
Proof
Using the definitions of the DtN operators \({\mathscr {T}}\), \(\mathscr {T}_N\) and following the discussion in (4.7), we have
Following [29], we let \(t\in [{\hat{R}}, R]\) and assume, without loss of generality, that t is closer to the left endpoint \({\hat{R}}\) than the right endpoint R. Denote \(\zeta =R-{\hat{R}}\). Then we have \(R-t\ge \frac{\zeta }{2}\). Thus
which implies that
Using Lemma 4.10 and the Cauchy–Schwarz inequality, we get
Noting that the function \(t^{4} e^{-2t}\) is bounded on \((0, +\infty )\), we have
where the last inequality uses the stability of the dual problem (4.24). For \(I_2\), we can show that
On the other hand, a simple calculation yields
It is easy to note that
Combining the above estimates, we obtain
which gives
Substituting the above inequality into (4.40), we get
which completes the proof. \(\square \)
Now, we are ready to present the proof of Theorem 4.1.
Proof
By Lemma 4.6 and Lemma 4.7, we obtain
Using (4.2) and choosing \(\delta \) such that \(\frac{R}{{\hat{R}}}\frac{\delta }{\min (\mu , \omega ^2)}<\frac{1}{2}\), we get
It follows from (4.2), (4.16), Lemmas 4.6 and 4.11 that we have
Substituting the above estimate into (4.42) and taking sufficiently large N such that
we obtain
which completes the proof of theorem. \(\square \)
5 Implementation and numerical experiments
In this section, we discuss the algorithmic implementation of the adaptive finite element DtN method and present two numerical examples to demonstrate the effectiveness of the proposed method.
5.1 Adaptive algorithm
Based on the a posteriori error estimate from Theorem 4.1, we use the FreeFem [26] to implement the adaptive algorithm of the linear finite element formulation. It is shown in Theorem 4.1 that the a posteriori error estimator consists of two parts: the finite element discretization error \(\epsilon _h\) and the DtN truncation error \(\epsilon _N\) which depends on the truncation number N. Explicitly
In the implementation, we choose \(\hat{R}, R\), and N based on (5.1) to make sure that the finite element discretization error is not polluted by the DtN truncation error, i.e., \(\epsilon _N\) is required to be very small compared to \(\epsilon _h\), for example, \(\epsilon _N\le 10^{-8}\). For simplicity, in the following numerical experiments, \({\hat{R}}\) is chosen such that the obstacle is exactly contained in the disk \(B_{{\hat{R}}}\), and N is taken to be the smallest positive integer such that \(\epsilon _N\le 10^{-8}\). The algorithm is shown in Table 1 for the adaptive finite element DtN method for solving the elastic wave scattering problem.
5.2 Numerical experiments
We report two examples to demonstrate the performance of the proposed method. The first example is a disk and has an analytical solution; the second example is a U-shaped obstacle which is commonly used to test numerical solutions for the wave scattering problems. In each example, we plot the magnitude of the numerical solution to give an intuition where the mesh should be refined, and also plot the actual mesh obtained by our algorithm to show the agreement. The a posteriori error is plotted against the number of nodal points to show the convergence rate. In the first example, we compare the numerical results by using the uniform and adaptive meshes to illustrate the effectiveness of the adaptive algorithm.
Example 1
This example is constructed such that it has an exact solution. Let the obstacle \(D=B_{0.5}\) be a disk with radius 0.5 and take \(\Omega =B_{1}{\setminus } {\overline{B}}_{0.5}\), i.e., \(\hat{R}=0.5, R=1\). If we choose the incident wave as
then it is easy to check that the exact solution is
where \(\kappa _1\) and \(\kappa _2\) are the compressional wave number and shear wave number, respectively.
In Table 2, numerical results are shown for the adaptive mesh refinement and the uniform mesh refinement, where \(\text {DoF}_h\) stands for the degree of freedom or the number of nodal points of the mesh \({\mathcal {M}}_h\), \(\epsilon _h\) is the a posteriori error estimate, and \(e_h=\Vert {\varvec{u}}-{\varvec{u}}_N^h\Vert _{{\varvec{H}}^1(\Omega )}\) is the a priori error. It can be seen that the adaptive mesh refinement requires fewer \(\text {DoF}_h\) than the uniform mesh refinement to reach the same level of accuracy, which shows the advantage of using the adaptive mesh refinement. Figure 2 displays the curves of \(\log e_h\) and \(\log \epsilon _h\) versus \(\log \text {DoF}_h\) for the uniform and adaptive mesh refinements with \(\omega =\pi , \lambda =2, \mu =1\), i.e., \(\kappa _1=\pi /2, \kappa _2=\pi \). It indicates that the meshes and the associated numerical complexity are quasi-optimal, i.e., \(\Vert {\varvec{u}}-{\varvec{u}}_N^h\Vert _{{\varvec{H}}^1(\Omega )} =O\big (\text {DoF}_h^{-1/2}\big )\) holds asymptotically. Figure 3 plots the magnitude of the numerical solution and an adaptively refined mesh with 15,407 elements. We can see that the solution oscillates on the edge of the obstacle but it is smooth away from the obstacle. This feature is caught by the algorithm. The mesh is adaptively refined around the obstacle and is coarse away from the obstacle.

Quasi-optimality of the a priori and a posteriori error estimates for Example 1

The numerical solution of Example 1. (Left) the magnitude of the numerical solution; (right) an adaptively refined mesh with 15,407 elements
Example 2
This example does not have an analytical solution. We consider a compressional plane incident wave \({\varvec{u}}^\mathrm{inc}({\varvec{x}}) ={\varvec{d}} e^{\mathrm{i}\,\kappa _1 {\varvec{x}}\cdot {\varvec{d}}}\) with the incident direction \({\varvec{d}}=(1,0)^\top \). The obstacle is U-shaped and is contained in the rectangular domain \(\left\{ {\varvec{x}}\in \mathbb R^2: -2<x<2.2, -0.7<y<0.7\right\} \). Due to the problem geometry, the solution contains singularity around the corners of the obstacle. We take \(R=3, {\hat{R}}=2.31\). Figure 4 shows the curve of \(\log \epsilon _h\) versus \(\log \text {DoF}_h\) at different frequencies \(\omega =1, \pi , 2\pi \). It demonstrates that the decay of the a posteriori error estimates is \(O\big (\text {DoF}_h^{-1/2}\big )\). Figure 5 plots the contour of the magnitude of the numerical solution and its corresponding mesh by using the parameters \(\omega =\pi , \lambda =2, \mu =1\). Again, the algorithm does capture the solution feature and adaptively refines the mesh around the corners of the obstacle where the solution displays singularity.

Quasi-optimality of the a posteriori error estimates with different frequencies for Example 2

The numerical solution of Example 2. (Left) The contour plot of the magnitude of the solution; (right) an adaptively refined mesh with 12,329 elements
6 Conclusion
In this paper, we present an adaptive finite element DtN method for the elastic obstacle scattering problem. Based on the Helmholtz decomposition, a new duality argument is developed to obtain the a posteriori error estimate. It does not only take into account of the finite element discretization error but also includes the truncation error of the DtN operator. We show that the truncation error decays exponentially with respect to the truncation parameter. The a posteriori error estimate for the solution of the discrete problem serves as a basis for the adaptive finite element approximation. Numerical results show that the proposed method is accurate and effective. This work provides a viable alternative to the adaptive finite element PML method to solve the elastic obstacle scattering problem. The method can be applied to solve many other wave propagation problems where the transparent boundary conditions are used for open domain truncation. Future work includes extending our analysis to the adaptive finite element DtN method for solving the three-dimensional elastic obstacle scattering problem, where a more complicated transparent boundary condition needs to be considered.
References
Babuška, I., Aziz, A.: Survey lectures on mathematical foundations of the finite element method. In: Aziz, A. (ed.) The Mathematical Foundation of the Finite Element Method with Application to the Partial Differential Equations, pp. 5–359. Academic Press, New York (1973)
Babuška, I., Werner, C.: Error estimates for adaptive finite element computations. SIAM J. Numer. Anal. 15, 736–754 (1978)
Bao, G., Hu, G., Sun, J., Yin, T.: Direct and inverse elastic scattering from anisotropic media. J. Math. Pures Appl. 117, 263–301 (2018)
Bao, G., Li, P., Wu, H.: An adaptive edge element method with perfectly matched absorbing layers for wave scattering by periodic structures. Math. Comput. 79, 1–34 (2010)
Bao, G., Wu, H.: Convergence analysis of the perfectly matched layer problems for time harmonic Maxwell’s equations. SIAM J. Numer. Anal. 43, 2121–2143 (2005)
Bayliss, A., Turkel, E.: Radiation boundary conditions for numerical simulation of waves. Commun. Pure Appl. Math. 33, 707–725 (1980)
Berenger, J.P.: A perfectly matched layer for the absorption of electromagnetic waves. J. Comput. Phys. 114, 185–200 (1994)
Bramble, J.H., Pasciak, J.E., Trenev, D.: Analysis of a finite PML approximation to the three dimensional elastic wave scattering problem. Math. Comput. 79, 2079–2101 (2010)
Brenner, S.C., Scott, L.R.: The mathematical theory of finite element method. In: Computers & Mathematics with Applications (2003)
Chen, J., Chen, Z.: An adaptive perfectly matched layer technique for 3-D time-harmonic electromagnetic scattering problems. Math. Comput. 77, 673–698 (2008)
Chen, Z., Wu, H.: An adaptive finite element method with perfectly matched absorbing layers for the wave scattering by periodic structures. SIAM J. Numer. Anal. 41, 799–826 (2003)
Chen, Z., Liu, X.: An adaptive perfectly matched layer technique for time-harmonic scattering problems. SIAM J. Numer. Anal. 43, 645–671 (2005)
Chen, Z., Xiang, X., Zhang, X.: Convergence of the PML method for elastic wave scattering problems. Math. Comput. 85, 2687–2714 (2016)
Chew, W., Liu, Q.: Perfectly matched layers for elastodynamics: a new absorbing boundary condition. J. Comput. Acoust. 4, 341–359 (1996)
Chew, W., Weedon, W.: A 3D perfectly matched medium for modified Maxwell’s equations with stretched coordinates. Microwave Opt. Technol. Lett. 13, 599–604 (1994)
Ciarlet, P.G.: Mathematical Elasticity, Vol. I: Three-Dimensional Elasticity, Studies in Mathematics and Its Applications. North-Holland, Amsterdam (1988)
Collino, F., Tsogka, C.: Application of the PML absorbing layer model to the linear elastodynamics problem in anisotropic heterogeneous media. Geophysics 66, 294–307 (2001)
Colton, D., Kress, R.: Integral Equation Methods in Scattering Theory. Wiley, New York (1983)
Engquist, B., Majda, A.: Absorbing boundary conditions for the numerical simulation of waves. Math. Comput. 31, 629–651 (1977)
Gächter, G.K., Grote, M.J.: Dirichlet-to-Neumann map for three-dimensional elastic waves. Wave Motion 37, 293–311 (2003)
Givoli, D., Keller, J.B.: Non-reflecting boundary conditions for elastic waves. Wave Motion 12, 261–279 (1990)
Grote, M., Kirsch, C.: Dirichlet-to-Neumann boundary conditions for multiple scattering problems. J. Comput. Phys. 201, 630–650 (2004)
Grote, M., Keller, J.: On nonreflecting boundary conditions. J. Comput. Phys. 122, 231–243 (1995)
Hagstrom, T.: Radiation boundary conditions for the numerical simulation of waves. Acta Numer. 8, 47–106 (1999)
Hastings, F.D., Schneider, J.B., Broschat, S.L.: Application of the perfectly matched layer (PML) absorbing boundary condition to elastic wave propagation. J. Acoust. Soc. Am. 100, 3061–3069 (1996)
Hecht, F.: New development in FreeFem++. J. Numer. Math. 20, 251–265 (2012)
Hohage, T., Schmidt, F., Zschiedrich, L.: Solving time-harmonic scattering problems based on the pole condition. II: convergence of the PML method. SIAM J. Math. Anal. 35, 547–560 (2003)
Hsiao, G.C., Nigam, N., Pasiak, J.E., Xu, L.: Error analysis of the DtN-FEM for the scattering problem in acoustic via Fourier analysis. J. Comput. Appl. Math. 235, 4949–4965 (2011)
Jiang, X., Li, P., Lv, J., Zheng, W.: An adaptive finite element method for the wave scattering with transparent boundary condition. J. Sci. Comput. 72, 936–956 (2017)
Jiang, X., Li, P.: An adaptive finite element PML method for the acoustic-elastic interaction in three dimensions. Commun. Comput. Phys. 22, 1486–1507 (2017)
Jiang, X., Li, P., Lv, J., Wang, Z., Wu, H., Zheng, W.: An adaptive finite element DtN method for Maxwell’s equations in biperiodic structures. IMA J. Numer. Anal. https://doi.org/10.1093/imanum/drab052
Jiang, X., Li, P., Zheng, W.: Numerical solution of acoustic scattering by an adaptive DtN finite element method. Commun. Comput. Phys. 13, 1277–1244 (2013)
Jiang, X., Li, P., Lv, J., Zheng, W.: An adaptive finite element PML method for the elastic wave scattering problem in periodic structures. ESAIM Math. Model. Numer. Anal. 51, 2017–2047 (2017)
Jiang, X., Li, P., Lv, J., Zheng, W.: Convergence of the PML solution for elastic wave scattering by biperiodic structures. Commun. Math. Sci. 16, 985–1014 (2018)
Komatitsch, D., Tromp, J.: A perfectly matched layer absorbing boundary condition for the second-order seismic wave equation. Geophys. J. Int. 154, 146–153 (2003)
Landau, L.D., Lifshitz, E.M.: Theory of Elasticity, Theory of Elasticity. Pergamon Press, Oxford (1986)
Lenoir, M.: Optimal isoparametric finite elements and error estimates for domains involving curved boundaries. SIAM J. Numer. Anal. 23, 562–580 (1986)
Li, P., Wang, Y., Wang, Z., Zhao, Y.: Inverse obstacle scattering for elastic waves. Inverse Prob. 32, 115018 (2016)
Li, P., Yuan, X.: Inverse obstacle scattering for elastic waves in three dimensions. Inverse Probl. Imaging 13, 545–573 (2019)
Li, Y., Zheng, W., Zhu, X.: A CIP-FEM for high frequency scattering problem with the truncated DtN boundary condition. CSIAM Trans. Appl. Math. 1, 530–560 (2020)
Monk, P.: Finite Element Methods for Maxwell’s Equations. Oxford University Press, Oxford (2003)
Nédélec, J.-C.: Acoustic and Electromagnetic Equations Integral Representations for Harmonic Problems. Springer, New York (2001)
Schatz, A.H.: An observation concerning Ritz-Galerkin methods with indefinite bilinear forms. Math. Comput. 28, 959–962 (1974)
Turkel, E., Yefet, A.: Absorbing PML boundary layers for wave-like equations. Appl. Numer. Math. 27, 533–557 (1998)
Wang, Z., Bao, G., Li, J., Li, P., Wu, H.: An adaptive finite element method for the diffraction grating problem with transparent boundary condition. SIAM J. Numer. Anal. 53, 1585–1607 (2015)
Watson, G.N.: A Treatise on the Theory of Bessel Functions. Cambridge University Press, Cambridge (1995)
Yuan, X., Bao, G., Li, P.: An adaptive finite element DtN method for the open cavity scattering problems. CSIAM Trans. Appl. Math. 1, 316–345 (2020)
Zhou, W., Wu, H.: An adaptive finite element method for the diffraction grating problem with PML and few-mode DtN truncations. J. Sci. Comput. 76, 1813–1838 (2018)
Acknowledgements
We would like to thank the two anonymous referees for their insightful comments and suggestions that have helped us improve the results of the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The research of PL is supported in part by the NSF grant DMS-1912704.
Appendix A. Transparent boundary conditions
Appendix A. Transparent boundary conditions
In this section, we show the transparent boundary conditions for the scalar potential functions \(\phi ^s, \psi ^s\) and the displacement of the scattered field \({\varvec{u}}^s\) on \(\partial B_R\).
In the exterior domain \({\mathbb {R}}^2{\setminus }{{\overline{B}}}_R\), the solutions of the Helmholtz equations (2.5) have the Fourier series expansions in the polar coordinates:
where \(H_n^{(1)}\) is the Hankel function of the first kind with order n. Taking the normal derivative of (A.1), we obtain the transparent boundary condition for the scalar potentials \(\phi ^s, \psi ^s\) on \(\partial B_R\):
The polar coordinates \((r, \theta )\) are related to the Cartesian coordinates \({\varvec{x}}=(x, y)\) by \(x=r\cos \theta , y=r\sin \theta \) with the local orthonormal basis \(\{{\varvec{e}}_r, \varvec{e}_\theta \}\), where \({\varvec{e}}_r=(\cos \theta , \sin \theta )^\top , {\varvec{e}}_\theta =(-\sin \theta , \cos \theta )^\top \).
Define a boundary operator for the displacement of the scattered wave
Based on the Helmholtz decomposition (2.5) and the transparent boundary condition (A.2), it is shown in [38] that the scattered field \({\varvec{u}}\) satisfies the transparent boundary condition
where
and \(M_n\) is a \(2\times 2\) matrix defined by
Here
and
The matrix entries \(N_{ij}^{(n)}, i,j=1, 2\) can be further simplified. Recall that the Hankel function \(H_n^{(1)}(z)\) satisfies the Bessel differential equation
We have from straightforward calculations that
Substituting the above into (A.3), we obtain
Lemma A.1
Let \(z>0\). For sufficiently large |n|, \(\Lambda _n(z)\) admits the following asymptotic property
Proof
Using the asymptotic expansions of the Hankel functions [46]
we have
A simple calculation yields that
which completes the proof.\(\square \)
Rights and permissions
About this article

Cite this article
Li, P., Yuan, X. An adaptive finite element DtN method for the elastic wave scattering problem. Numer. Math. 150, 993–1033 (2022). https://doi.org/10.1007/s00211-022-01273-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00211-022-01273-4