
Abstract
We analyze in this paper a virtual element approximation for the acoustic vibration problem. We consider a variational formulation relying only on the fluid displacement and propose a discretization by means of \(\mathrm {H}(\mathrm {div})\) virtual elements with vanishing rotor. Under standard assumptions on the meshes, we show that the resulting scheme provides a correct approximation of the spectrum and prove optimal order error estimates. With this end, we prove approximation properties of the proposed virtual elements. We also report some numerical tests supporting our theoretical results.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The Virtual Element Method (VEM) introduced in [7] is a recent generalization of the Finite Element Method which is characterized by the capability of dealing with very general polygonal/polyhedral meshes and the possibility to easily implement highly regular discrete spaces. Indeed, by avoiding the explicit construction of the local basis functions, the VEM can easily handle general polygons/polyhedrons without complex integrations on the element (see [8] for details on the coding aspects of the method). The interest in numerical methods that can make use of general polytopal meshes has recently undergone a significant growth in the mathematical and engineering literature; among the large number of papers on this subject, we cite as a minimal sample [4, 10, 25, 31, 32, 42, 43]. Regarding the VEM literature, we limit ourselves to the following few articles for the theoretical developments [1, 5, 7,8,9, 22, 26]. To date, VEM has been successfully applied to different fields: linear and non linear elasticity [11, 34], contact problems [46], thin plates [23, 27], Stokes flow [2, 12, 24], advection-diffusion [13], fluid flows inside a fractured medium [14], topology optimization [33], time dependent problems [44, 45], spectral problems [38], Helmholtz problems [39], Cahn–Hilliard equation [3], etc. Finally, we mention the recent work [40] for a thorough description of the state of the art and further references.
The numerical approximation of eigenvalue problems for partial differential equations derived from engineering applications, is object of great interest from both, the practical and theoretical points of view. We refer to [19, 20] and the references therein for the state of the art in this subject area. In particular, this paper focus on the so called acoustic vibration problem; namely, to compute the vibration modes and the natural frequencies of an inviscid compressible fluid within a rigid cavity [47]. One motivation for considering this problem is that it constitutes a stepping stone towards the more challenging goal of devising virtual element spectral approximations for coupled systems involving fluid-structure interaction, which arises in many engineering problems. The simplest formulation of this problem is obtained by using pressure variations which leads to an eigenvalue problem for the Laplace operator [47]. However, for coupled problems, it is convenient to use a dual formulation in terms of fluid displacements (see [36]). A standard finite element approximation of this problem leads to spurious modes (see [35]). Such a spectral pollution can be avoided by using \(\mathrm {H}(\mathrm {div})\)-conforming elements, like Raviart–Thomas finite elements [15, 18, 20, 41]. See [17] for a thorough discussion on this topic.
The aim of this paper is to introduce and analyze an \(\mathrm {H}(\mathrm {div})\) VEM which applies to general polygonal meshes, made by possibly non-convex elements, for the two-dimensional acoustic vibration problem. We begin with a variational formulation of the spectral problem relying only on the fluid displacement. Then, we propose a discretization based on the mixed VEM introduced in [9] for general second order elliptic problems. The well-known abstract spectral approximation theory (see [6]) cannot be used to deal with the analysis of our problem. Indeed, the kernel of the bilinear form on the left-hand side of the variational formulation has in our case an infinite-dimensional kernel. Although the standard shift strategy allows a solution operator to be defined, this is not compact and its nontrivial essential spectrum may in such cases lead to spectral pollution at the discrete level. However, by appropriately adapting the abstract spectral approximation theory for non-compact operators developed in [29, 30], under rather mild assumptions on the polygonal meshes, we establish that the resulting scheme provides a correct approximation of the spectrum and prove error estimates for the eigenfunctions and a double order for the eigenvalues. As a by-product, we derive optimal approximation estimates for \(\mathrm {H}(\mathrm {div})\) virtual elements with vanishing rotor, a result that could be useful also for other applications. These results and their corresponding proofs are collected in an appendix.
The outline of this article is as follows: We introduce in Sect. 2 the variational formulation of the acoustic vibration problem, define a solution operator and establish its spectral characterization. In Sect. 3, we introduce the virtual element discrete formulation, describe the spectrum of a discrete solution operator and establish some auxiliary results. In Sect. 4, we prove that the numerical scheme provides a correct spectral approximation and establish optimal order error estimates for the eigenvalues and eigenfunctions. In Sect. 5, we report a couple of numerical tests that allow us to assess the convergence properties of the method, to confirm that it is not polluted with spurious modes and to check that the experimental rates of convergence agree with the theoretical ones. Finally, we introduce in an appendix the proofs of the approximation results for the introduced virtual element interpolant.
Throughout the paper, \(\Omega \) is a generic Lipschitz bounded domain of \({\mathbb {R}}^2\). For \(s\ge 0\), \(\left\| \cdot \right\| _{s,\Omega }\) stands indistinctly for the norm of the Hilbertian Sobolev spaces \({\mathrm {H}^{s}(\Omega )}\) or \([{\mathrm {H}^{s}(\Omega )}]^2\) with the convention \(\mathrm {H}^0(\Omega ):=\mathrm {L}^2(\Omega )\). We also define the Hilbert space \({\mathrm {H}(\mathrm {div};\Omega )}:=\left\{ \varvec{v}\in [\mathrm {L}^2(\Omega )]^2:\ \mathrm {div}\,\varvec{v}\in \mathrm {L}^2(\Omega )\right\} \), whose norm is given by \(\left\| \varvec{v}\right\| ^2_{\mathrm {div},\Omega } :=\left\| \varvec{v}\right\| _{0,\Omega }^2+\left\| \mathrm {div}\varvec{v}\right\| ^2_{0,\Omega }\). Finally, we employ \(\mathbf {0}\) to denote a generic null vector and C to denote generic constants independent of the discretization parameters, which may take different values at different places.
2 The spectral problem
We consider the free vibration problem for an acoustic fluid within a bounded rigid cavity \(\Omega \subset {\mathbb {R}}^2\) with polygonal boundary \(\Gamma \) and outward unit normal vector \(\varvec{n}\):
where \(\varvec{w}\) is the fluid displacement, p is the pressure fluctuation, \(\varrho \) the density, c the acoustic speed and \(\omega \) the vibration frequency. Multiplying the first equation above by a test function
integrating by parts, using the boundary condition and eliminating p, we arrive at the following weak formulation in which, for simplicity, we have taken the physical parameters \(\varrho \) and c equal to one and denote \(\lambda =\omega ^2\):
Problem 1
Find \((\lambda ,\varvec{w})\in {\mathbb {R}}\times \varvec{\mathcal {V}}\), \(\varvec{w}\ne 0\), such that
Since the bilinear form on the left-hand side is not \({\mathrm {H}(\mathrm {div};\Omega )}\)-elliptic, it is convenient to use a shift argument to rewrite this eigenvalue problem in the following equivalent form:
Problem 2
Find \((\lambda ,\varvec{w})\in {\mathbb {R}}\times \varvec{\mathcal {V}}\), \(\varvec{w}\ne 0\), such that
where the bilinear forms are defined for any \(\varvec{w},\varvec{v}\in \varvec{\mathcal {V}}\) by
We define the solution operator associated with Problem 2:
where \(\mathbf {u}\in \varvec{\mathcal {V}}\) is the solution of the corresponding source problem:
Since the bilinear form \(a(\cdot ,\cdot )\) is \({\mathrm {H}(\mathrm {div};\Omega )}\)-elliptic, the problem above is well posed. As an immediate consequence, we deduce that the linear operator \(\mathbf {T}\) is well defined and bounded. Notice that \((\lambda ,\varvec{w})\in {\mathbb {R}}\times \varvec{\mathcal {V}}\) solves Problem 1 if and only if \((1/\left( 1+\lambda \right) ,\varvec{w})\) is an eigenpair of \(\mathbf {T}\), i.e, if and only if
Moreover, it is easy to check that \(\mathbf {T}\) is self-adjoint with respect to the inner products \(a(\cdot ,\cdot )\) and \(b(\cdot ,\cdot )\) in \(\varvec{\mathcal {V}}\).
In what follows, we recall some results that can be found in [15] in the more general context of fluid-solid vibration problems. The proofs in [15] can be readily adapted to this case to obtain the following results. Let the space
Lemma 1
The operator \(\mathbf {T}\) admits the eigenvalue \(\mu =1\) with associated eigenspace \(\varvec{\mathcal {K}}\).
The following result provides a simple characterization of the orthogonal complement of \(\varvec{\mathcal {K}}\) in \(\varvec{\mathcal {V}}\).
Lemma 2
Let \(\varvec{\mathcal {G}}:=\{\nabla q:\ q\in {\mathrm {H}^1(\Omega )}\}\). Then,
is an orthogonal decomposition in both \([\mathrm {L}^2(\Omega )]^2\) and \(\,{\mathrm {H}(\mathrm {div};\Omega )}\).
Moreover, there exists \(s\in (1/2,1]\) such that, for all \(\varvec{v}\in \varvec{\mathcal {V}}\), if \(\varvec{v}=\varvec{\varphi }+\nabla q\) with \(\varvec{\varphi }\in \varvec{\mathcal {K}}\) and \(\nabla q\in \varvec{\mathcal {G}}\cap \varvec{\mathcal {V}}\), then \(\nabla q\in [{\mathrm {H}^{s}(\Omega )}]^2\) and \(\left\| \nabla q\right\| _{s,\Omega } \le C\left\| \mathrm {div}\varvec{v}\right\| _{0,\Omega }\).
From now on, we fix \(s\in (1/2,1]\) such that the above lemma holds true.
The following result shows that the subspace \(\varvec{\mathcal {G}}\cap \varvec{\mathcal {V}}\) is invariant for \(\mathbf {T}\).
Lemma 3
There holds
Smoothing properties of \(\mathbf {T}\) as an operator from \(\varvec{\mathcal {G}}\cap \varvec{\mathcal {V}}\) into itself are established in what follows.
Theorem 1
There holds
and there exists \(C>0\) such that, for all \(\varvec{f}\in \varvec{\mathcal {G}}\cap \varvec{\mathcal {V}}\), if \(\mathbf {u}=\mathbf {T}\varvec{f}\), then
Consequently, the operator \(\mathbf {T}|_{\varvec{\mathcal {G}}\cap \varvec{\mathcal {V}}}:\ \varvec{\mathcal {G}}\cap \varvec{\mathcal {V}}\rightarrow \varvec{\mathcal {G}}\cap \varvec{\mathcal {V}}\) is compact.
Finally, the following result provides a spectral characterization of \(\mathbf {T}\).
Theorem 2
The spectrum of \(\mathbf {T}\), \(\mathrm {sp}(\mathbf {T})\), decomposes as \(\mathrm {sp}(\mathbf {T})=\left\{ 0,1\right\} \cup \left\{ \mu _k\right\} _{k\in {\mathbb {N}}}\), where:
-
(i)
\(\mu =1\) is an infinite-multiplicity eigenvalue of \(\mathbf {T}\) and its associated eigenspace is \(\varvec{\mathcal {K}}\);
-
(ii)
\(\left\{ \mu _k\right\} _{k\in {\mathbb {N}}}\subset (0,1)\) is a sequence of finite-multiplicity eigenvalues of \(\mathbf {T}\) which converge to 0 and if \(\varvec{w}\) is an eigenfunction of \(\mathbf {T}\) associated with such an eigenvalue, then there exists \(\tilde{s}>1/2\) and \(C>0\), both depending on the eigenvalue, such that
$$\begin{aligned} \left\| \varvec{w}\right\| _{\tilde{s},\Omega } +\left\| \mathrm {div}\varvec{w}\right\| _{1+\tilde{s},\Omega } \le C\left\| \varvec{w}\right\| _{\mathrm {div},\Omega }; \end{aligned}$$ -
(iii)
\(\mu =0\) is not an eigenvalue of \(\mathbf {T}\).
3 The virtual elements discretization
We begin this section, by recalling the mesh construction and the assumptions considered to introduce a discrete virtual element space. Then, we will introduce a virtual element discretization of Problem 1 and provide a spectral characterization of the resulting discrete eigenvalue problem. Let \(\left\{ \mathcal {T}_h\right\} \) be a family of decompositions of \(\Omega \) into polygons E. Let \(h_E\) denote the diameter of the element E and \(h:=\max _{E\in \Omega }h_E\).
For the analysis, we make the following assumptions on the meshes as in [9, 22]: there exists a positive real number \(C_{{\mathcal T}}\) such that, for every \(E\in {\mathcal T}_h\) and for every \(\mathcal {T}_h\),
-
\(\mathbf {A_1}\): the ratio between the shortest edge and the diameter of E is larger than \(C_{{\mathcal T}}\);
-
\(\mathbf {A_2}\): E is star-shaped with respect to every point of a ball of radius \(C_{{\mathcal T}}h_E\).
For any subset \(S\subseteq {\mathbb {R}}^2\) and any non-negative integer k, we indicate by \(\mathbb {P}_k(S)\) the space of polynomials of degree up to k defined on S. To keep the notation simpler, we denote by \(\varvec{n}\) a generic normal unit vector; in each case, its precise definition will be clear from the context. We consider now a polygon E and, for any fixed non-negative integer k, we define the following finite dimensional space (inspired in [9, 22]):
Remark 1
It is easy to check that a vector field \(\varvec{v}_h\in \varvec{\mathcal {V}}_h^E\) satisfying \(\varvec{v}_h\cdot \varvec{n}=0\) on \(\partial E\) and \(\mathrm {div}\varvec{v}_h=0\) in E is identically zero. In fact, since a star-shaped polygon E is simply connected and \(\mathrm {rot}\varvec{v}_h=0\) in E, there exists \(\gamma \in {\mathrm {H}^1(E)}\) such that \(\varvec{v}_h=\nabla \gamma \). Then, \(\Delta \gamma =\mathrm {div}\varvec{v}_h=0\) in E and \(\partial \gamma /\partial \varvec{n}=\varvec{v}_h\cdot \varvec{n}=0\) on \(\partial E\). Hence, \(\varvec{v}_h=\nabla \gamma =\mathbf {0}\) in E. This implies that \(\varvec{\mathcal {V}}_h^E\) is finite dimensional, the dimension being less or equal to \(N_E\left( k+1\right) +\left( k+1\right) \left( k+2\right) /2-1\), where \(N_E\) is the number of edges of E.
We define the following degrees of freedom for functions \(\varvec{v}_h\) in \(\varvec{\mathcal {V}}_h^E\):
Remark 2
For the degrees of freedom (2), we could integrate by parts and substitute them with
Needless to say, certain degrees of freedom will be more convenient when writing the code and the others might be more convenient when writing a proof.
Let us also remark that the degrees of freedom (1) and (3), the latter for all \(q\in \mathbb {P}_k(E)\) are not linearly independent since
In what follows, we show that (1) and (2) are actually unisolvent.
Proposition 1
The degrees of freedom (1) and (2) are unisolvent in \(\varvec{\mathcal {V}}_h^E\).
Proof
It is easy to check that the number of degrees of freedom (1) and (2) equals the dimension of \(\varvec{\mathcal {V}}_h^E\). Thus, we only need to show that if \(\varvec{v}_h\) in \(\varvec{\mathcal {V}}_h^E\) is such that
then \(\varvec{v}_h=\mathbf {0}\). Since \(\mathrm {div}\varvec{v}_h\in \mathbb {P}_k(E)\), by taking \(q:=\mathrm {div}\varvec{v}_h\) above, we have
Then, \(\mathrm {div}\varvec{v}_{h}=0\). Similarly, for each edge \(e\subset \partial E\), since \(\varvec{v}_h\cdot \varvec{n}\in \mathbb {P}_k(e)\), by taking \(q:=\varvec{v}_h\cdot \varvec{n}\) we obtain
Hence, \(\varvec{v}_h\cdot \varvec{n}=0\) on \(\partial E\). Therefore, according to Remark 1, \(\varvec{v}_h=\mathbf {0}\) in E. \(\square \)
For each decomposition \(\mathcal {T}_h\) of \(\Omega \) into polygons E, we define
In agreement with the local choice, we choose the following global degrees of freedom:
Remark 3
The number of internal degrees of freedom of the Virtual Element Method here considered (\(VEM_k\)) is in general less than that of standard finite elements of the same order such as Raviart–Thomas (\(RT_k\)) or Brezzi–Douglas–Marini (\(BDM_k\)) elements, while the number of degrees of freedom per edge is the same. A count of the internal degrees of freedom gives
The proposed family may therefore be preferable to more standard finite elements even in the case of triangular meshes, especially for moderate-to-high values of k.
In order to construct the discrete scheme, we need some preliminary definitions. First, we split the bilinear form \(a(\cdot ,\cdot )\) introduced in the previous section as follows:
The local matrices associated with the first term on the right hand side above are easily computable since \(\mathrm {div}\mathbf {u}_h\) and \(\mathrm {div}\varvec{v}_h\) are polynomials in each element. We explicitly point out that, as can be seem from (1) and (2), the divergence of any vector \(\varvec{v}_h\in \varvec{\mathcal {V}}_h\) can be easily computed from knowledge of the degrees of freedom of \(\varvec{v}_h\). Instead, for the local matrices associated with the second term on the right hand side above, we must take into account that, due to the implicit space definition, it is not possible to compute exactly the integrals. Because of this, we will use an approximation of them. The final output will be a local matrix on each element E whose associated bilinear form is exact whenever one of the two entries is a gradient of a polynomial of degree \(k+1\). This will allow us to retain the optimal approximation properties of the space \(\varvec{\mathcal {V}}_h\). With this aim, we define first for each element E the space
Then, we define the \([\mathrm {L}^2(E)]^2\)-orthogonal projector \(\varvec{\Pi }_h^E:\;[\mathrm {L}^2(E)]^2\longrightarrow \widehat{\varvec{\mathcal {V}}}_h^E\) by
We point out that \(\varvec{\Pi }_h^E\varvec{v}_h\) is explicitly computable for every \(\varvec{v}_h\in \varvec{\mathcal {V}}_h^E\) using only its degrees of freedom (1) and (2). In fact, it is easy to check that for all \(\varvec{v}_h\in \varvec{\mathcal {V}}_h^E\) and for all \( q\in \mathbb {P}_{k+1}(E)\),
Remark 4
In particular, for \(k=0\), for all \(\varvec{v}_h\in \varvec{\mathcal {V}}_h^E\) and for all \(q\in \mathbb {P}_{1}(E)\), we have that
On the other hand, let \(S^E(\cdot ,\cdot )\) be any symmetric positive definite (and computable) bilinear form to be chosen as to satisfy
for some positive constants \(c_0\) and \(c_1\) depending only on the constant \(C_{{\mathcal T}}\) from mesh assumptions \(\mathbf {A_1}\) and \(\mathbf {A_2}\). Then, we define on each element E the bilinear form
and, in a natural way,
The following two properties of the bilinear form \(b_h^E(\cdot , \cdot )\) are easily derived by repeating in our case the arguments from [22, Proposition 4.1].
-
Consistency:
$$\begin{aligned} b_h^{E}(\widehat{\mathbf {u}}_h,\varvec{v}_h) =\int _{E}\widehat{\mathbf {u}}_h\cdot \varvec{v}_h \qquad \forall \widehat{\mathbf {u}}_h\in \widehat{\varvec{\mathcal {V}}}_h^E, \quad \forall \varvec{v}_h \in \varvec{\mathcal {V}}_h^E,\quad \forall E\in \mathcal {T}_h. \end{aligned}$$(7) -
Stability: There exist two positive constants \(\alpha _*\) and \(\alpha ^*\), independent of E, such that:
$$\begin{aligned} \alpha _*\int _{E}\varvec{v}_h\cdot \varvec{v}_h \le b_h^{E}(\varvec{v}_h,\varvec{v}_h) \le \alpha ^*\int _{E}\varvec{v}_h\cdot \varvec{v}_h \qquad \forall \varvec{v}_h\in \varvec{\mathcal {V}}_h^E,\quad \forall E\in \mathcal {T}_h. \end{aligned}$$(8)
Now, we are in a position to write the virtual element discretization of Problem 1.
Problem 3
Find \((\lambda _h,\varvec{w}_h)\in {\mathbb {R}}\times \varvec{\mathcal {V}}_h\), \(\varvec{w}_h\ne 0\), such that
We use again a shift argument to rewrite this discrete eigenvalue problem in the following convenient equivalent form.
Problem 4
Find \((\lambda _h,\varvec{w}_h)\in {\mathbb {R}}\times \varvec{\mathcal {V}}_h\), \(\varvec{w}_h\ne 0\), such that
where
We observe that by virtue of (8), the bilinear form \(a_h(\cdot ,\cdot )\) is bounded. Moreover, as is shown in the following lemma, it is also uniformly elliptic.
Lemma 4
There exists a constant \(\beta >0\), independent of h, such that
Proof
Thanks to (8), the above inequality holds with \(\beta :=\min \left\{ \alpha _{*},1\right\} \). \(\square \)
The next step is to introduce the discrete version of the operator \(\mathbf {T}\):
where \(\mathbf {u}_h\in \varvec{\mathcal {V}}_h\) is the solution of the corresponding discrete source problem:
We deduce from Lemma 4, (8) and the Lax–Milgram Theorem, that the linear operator \(\mathbf {T}_h\) is well defined and bounded uniformly with respect to h.
Once more, as in the continuous case, \((\lambda _h,\varvec{w}_h)\) solves Problem 3 if and only if \((1/(1+\lambda _h),\varvec{w}_h)\) is an eigenpair of \(\mathbf {T}_h\), i.e, if and only if
Moreover, it is easy to check that \(\mathbf {T}_h\) is self-adjoint with respect to \(a_h(\cdot ,\cdot )\) and \(b_h(\cdot ,\cdot )\). To describe the spectrum of this operator, we proceed as in the continuous case and decompose \(\varvec{\mathcal {V}}_h\) into a convenient direct sum. To this end, we define
and notice that, here again, \(\mathbf {T}_h|_{\varvec{\mathcal {K}}_h}:\;\varvec{\mathcal {K}}_h\longrightarrow \varvec{\mathcal {K}}_h\) reduces to the identity. Moreover, we have the following result.
Proposition 2
\(\mu _h=1\) is an eigenvalue of \(\mathbf {T}_h\) and its eigenspace is \(\varvec{\mathcal {K}}_h\).
Proof
We have that \(\varvec{w}_h\in \varvec{\mathcal {V}}_h\) is an eigenfunction associated with the eigenvalue \(\mu _h=1\) if and only if \(\int _{E}\mathrm {div}\varvec{w}_h\mathrm {div}\varvec{v}_h=0\ \,\forall \varvec{v}_h\in \varvec{\mathcal {V}}_h\), namely, if and only if \(\varvec{w}_h\in \varvec{\mathcal {K}}_h\). \(\square \)
As a consequence of all this, we have the following spectral characterization of the discrete solution operator.
Theorem 3
The spectrum of \(\mathbf {T}_h\), \(\mathrm {sp}(\mathbf {T}_h)\), consists of \(M_h:=\mathrm {dim}(\varvec{\mathcal {V}}_h)\) eigenvalues, repeated according to their respective multiplicities. It decomposes as \(\mathrm {sp}(\mathbf {T}_h)=\left\{ 1\right\} \cup \left\{ \mu _{hk}\right\} _{k=1}^{N_h}\), where:
-
(i)
the eigenspace associated with \(\mu _h=1\) is \(\varvec{\mathcal {K}}_h\);
-
(ii)
\(\mu _{hk}\in (0,1)\), \(k=1,\dots ,N_h:=M_h-\mathrm {dim}(\varvec{\mathcal {K}}_h)\), are non-defective eigenvalues repeated according to their respective multiplicities.
In what follows, we derive several auxiliary results which will be used in the following section to prove convergence and error estimates for the spectral approximation.
First, we establish interpolation properties in the discrete space \(\varvec{\mathcal {V}}_h\). Although the \(\varvec{\mathcal {V}}_h\)-interpolant can be defined for less regular functions, in our case it is enough to consider \(\varvec{v}\in \varvec{\mathcal {V}}\) such that \(\varvec{v}|_{E}\in [{\mathrm {H}^{t}(E)}]^2\) for some \(t>1/2\) and for all \(E\in \mathcal {T}_h\), so that we can easily take its trace on each individual edge. Then, we define its interpolant \(\varvec{v}_I\in \varvec{\mathcal {V}}_h\) by fixing its degrees of freedom as follows:
In what follows, we state two results about the approximation properties of this interpolant, whose proof we postpone to the Appendix. The first one concerns approximation properties of \(\mathrm {div}\varvec{v}_I\) and follows from a commuting diagram property for this interpolant, which involves the \(\mathrm {L}^2(\Omega )\)-orthogonal projection
Lemma 5
Let \(\varvec{v}\in \varvec{\mathcal {V}}\) be such that \(\varvec{v}\in [{\mathrm {H}^{t}(\Omega )}]^2\) with \(t>1/2 \). Let \(\varvec{v}_I\in \varvec{\mathcal {V}}_h\) be its interpolant defined by (9) and (10). Then,
Consequently, for all \(E\in \mathcal {T}_h\), \(\left\| \mathrm {div}\varvec{v}_I\right\| _{0,E} \le \left\| \mathrm {div}\varvec{v}\right\| _{0,E}\) and, if \(\mathrm {div}\varvec{v}|_{E}\in {\mathrm {H}^{r}(E)}\) with \(r\ge 0\), then
The second result concerns the \(\mathrm {L}^2(\Omega )\) approximation property of \(\varvec{v}_I\).
Lemma 6
Let \(\varvec{v}\in \varvec{\mathcal {V}}\) be such that \(\varvec{v}\in [{\mathrm {H}^{t}(\Omega )}]^2\) with \(t>1/2\). Let \(\varvec{v}_I\in \varvec{\mathcal {V}}_h\) be its interpolant defined by (9) and (10). Let \(E\in \mathcal {T}_h\). If \(1\le t\le k+1\), then
whereas, if \(1/2 <t\le 1\), then
Let \(\varvec{\mathcal {K}}_h^{\bot }\) be the \([\mathrm {L}^2(\Omega )]^2\)-orthogonal complement of \(\varvec{\mathcal {K}}_h\) in \(\varvec{\mathcal {V}}_h\), namely,
Note that \(\varvec{\mathcal {K}}_h\) and \(\varvec{\mathcal {K}}_h^{\bot }\) are also orthogonal in \({\mathrm {H}(\mathrm {div};\Omega )}\). The following lemma shows that, although \(\varvec{\mathcal {K}}_h^{\bot }\not \subset \varvec{\mathcal {K}}^{\bot }=\varvec{\mathcal {G}}\cap \varvec{\mathcal {V}}\), the gradient part in the Helmholtz decomposition of a function in \(\varvec{\mathcal {K}}_h^{\bot }\) is asymptotically small.
Lemma 7
Let \(\varvec{v}_h\in \varvec{\mathcal {K}}_h^{\bot }\). Then, there exist \(p\in {\mathrm {H}^{1+s}(\Omega )}\) with \(s\in (1/2,1]\) as in Lemma 2 and \(\varvec{\psi }\in \varvec{\mathcal {K}}\) such that \(\varvec{v}_h=\varvec{\psi }+\nabla p\) and
Proof
Let \(\varvec{v}_h\in \varvec{\mathcal {K}}_h^{\bot }\subset \varvec{\mathcal {V}}_h\subset \varvec{\mathcal {V}}\). As a consequence of Lemma 2, we know that there exist \(p\in {\mathrm {H}^{1+s}(\Omega )}\) and \(\varvec{\psi }\in \varvec{\mathcal {K}}\) such that \(\varvec{v}_h=\nabla p+\varvec{\psi }\) and that \(\left\| \nabla p\right\| _{s,\Omega }\le C\left\| \mathrm {div}\varvec{v}_h \right\| _{0,\Omega }\), which proves (11).
On the other hand, we have that
Now, according to Lemma 5, \(\mathrm {div}((\nabla p)_{I})=P_k(\mathrm {div}(\nabla p))\). Therefore, since \(\Delta p=\mathrm {div}\varvec{v}_h\), we obtain
where we have used that for \(\varvec{v}_h\in \varvec{\mathcal {V}}_h\), \(\mathrm {div}\varvec{v}_h|_{E}\in \mathbb {P}_k(E)\). Therefore \(\left( (\nabla p)_{I}-\varvec{v}_h\right) \in \varvec{\mathcal {K}}_h\subseteq \varvec{\mathcal {K}}\) and since \(\nabla p\in \varvec{\mathcal {G}}\cap \varvec{\mathcal {V}}=\varvec{\mathcal {K}}^{\bot }\) and \(\varvec{v}_h\in \varvec{\mathcal {K}}_h^{\bot }\), we have that
Thus,
and, by using Cauchy–Schwarz inequality, Lemma 6 and (11), we obtain
which allows us to complete the proof. \(\square \)
To end this section, we prove the following result which will be used in the sequel. Let \(\varvec{\Pi }_h\) be defined in \(\varvec{\mathcal {V}}\) by
with \(\varvec{\Pi }_h^E\) defined by (4).
Lemma 8
There exists a constant \(C>0\) such that, for every \(p\in {\mathrm {H}^{1+t}(\Omega )}\) with \(1/2<t\le k+1\), there holds
Proof
The result follows from the fact that, since \(\varvec{\Pi }_h^{E}\) is the \([\mathrm {L}^2(E)]^2\)-projection onto \(\widehat{\varvec{\mathcal {V}}}_h^E:=\nabla (\mathbb {P}_{k+1}(E))\) (cf. (4)),
Let us remark that the last inequality is a consequence of standard approximation estimates for polynomials on polygons in case of integer t (see, for instance, [21, Lemma 4.3.8]) and standard Banach space interpolation results for non-integer t. \(\square \)
4 Spectral approximation and error estimates
To prove that \(\mathbf {T}_h\) provides a correct spectral approximation of \(\mathbf {T}\), we will resort to the theory developed in [29] for non-compact operators. To this end, we first introduce some notation. For any linear bounded operator \(\mathbf {S}:\;\varvec{\mathcal {V}}\longrightarrow \varvec{\mathcal {V}}\), we define
We recall the definition of the gap \(\widehat{\delta }\) between two closed subspaces \(\varvec{\mathcal {X}}\) and \(\varvec{\mathcal {Y}}\) of \(\varvec{\mathcal {V}}\):
where
The theory from [29] guarantees approximation of the spectrum of \(\mathbf {T}\), provided the following two properties are satisfied:
-
P1: \(\ \left\| \mathbf {T}-\mathbf {T}_h\right\| _h\rightarrow 0\ \) as \(\ h\rightarrow 0\);
-
P2: \(\ \forall \varvec{v}\in \varvec{\mathcal {V}}\ \) \(\ \displaystyle \lim _{h\rightarrow 0}\delta (\varvec{v},\varvec{\mathcal {V}}_h)=0\).
Property P2 follows immediately from the density of the smooth functions in \(\varvec{\mathcal {V}}\) and the approximation properties in Lemmas 5 and 6. Hence, there only remains to prove property P1. With this aim, first we note that since \(\mathbf {T}|_{\varvec{\mathcal {K}}_h}\) and \(\mathbf {T}_h|_{\varvec{\mathcal {K}}_h}\) both reduce to the identity, it is enough to estimate \(\left\| \left( \mathbf {T}-\mathbf {T}_h\right) \varvec{f}_h\right\| _{\mathrm {div},\Omega }\) for \(\varvec{f}_h\in \varvec{\mathcal {K}}_h^\bot \).
Lemma 9
There exists \(C>0\) such that, for all \(\varvec{f}_h\in \varvec{\mathcal {K}}_h^{\bot }\),
with \(s\in (1/2,1]\) as in Lemma 2.
Proof
Let \(\varvec{f}_h\in \varvec{\mathcal {K}}_h^\bot \), \(\mathbf {u}:=\mathbf {T}\varvec{f}_h\) and \(\mathbf {u}_h:=\mathbf {T}_h\varvec{f}_h\). According to Lemma 2, we write \(\mathbf {u}=\varvec{\varphi }+\nabla q\) with \(\varvec{\varphi }\in \varvec{\mathcal {K}}\), \(\nabla q\in [{\mathrm {H}^{s}(\Omega )}]^2\) and \(\left\| \nabla q\right\| _{s,\Omega }\le C\left\| \mathrm {div}\mathbf {u}\right\| _{0,\Omega }\). We have
where \((\nabla q)_I\) is the \(\varvec{\mathcal {V}}_h\)-interpolant of \(\nabla q\) defined by (9) and (10). We define \(\varvec{v}_h:=\mathbf {u}_h-(\nabla q)_I\in \varvec{\mathcal {V}}_h\). Thanks to Lemma 4, the definition (6) of \(b_h^{E}(\cdot ,\cdot )\) and those of \(\mathbf {T}\) and \(\mathbf {T}_h\), we have
where for the last equality we have also used the consistency property (7). Since \(\mathrm {div}((\nabla q)_I)=P_k(\mathrm {div}(\nabla q))\) (cf. Lemma 5), we have that \(\int _{\Omega }\mathrm {div}(\mathbf {u}-(\nabla q)_I)\mathrm {div}\varvec{v}_h=0\) for all \(\varvec{v}_h\in \varvec{\mathcal {V}}_h\). Then,
The first term on the right hand side can be bounded as follows:
where we have used (4) to write the last equality. Now, from the symmetry of \(S^E(\cdot ,\cdot )\), (5), a Cauchy–Schwarz inequality and the fact that \(\varvec{\Pi }_h^E\) is an \(\mathrm {L}^2(E)\)-projection (cf. (4)), we have that
Therefore, using Cauchy–Schwarz inequality again,
Substituting the above estimate in (15), from (8) and Cauchy–Schwarz inequality we obtain
with \(\varvec{\Pi }_{h}\) as defined in (13). Therefore, from (14),
Thus, there only remains to estimate the three terms on the right-hand side above. For the first one we write \(\varvec{f}_h=\varvec{\psi }+\nabla p\) with \(\varvec{\psi }\in \varvec{\mathcal {K}}\) and \(p\in {\mathrm {H}^{1+s}(\Omega )}\) as in Lemma 7. Hence, by using this and Lemma 8,
On the other hand, we have that \(\mathbf {u}=\mathbf {T}(\varvec{\psi }+\nabla p)=\varvec{\psi }+\mathbf {T}(\nabla p)\) and, from Lemmas 3 and 2, \(\mathbf {T}(\nabla p)=\nabla q\) and \(\varvec{\psi }=\varvec{\varphi }\). Moreover, by virtue of Theorem 1, \(q\in {\mathrm {H}^{1+s}(\Omega )}\) and
whereas estimate (12) still holds true for \(\varvec{\psi }\):
Then, using that \(\varvec{\Pi }_h\) is an \([\mathrm {L}^2(\Omega )]^2\)-projection, from Lemmas 7 and 8 we have
Finally, using once more that \(\mathbf {u}=\varvec{\psi }+\nabla q\) and Lemmas 7, 6 and 5, we write
where, we have used that \(\nabla q=\mathbf {T}(\nabla p)\) and, hence, since \(\nabla p\in \varvec{\mathcal {G}}\cap \varvec{\mathcal {V}}\), from Theorem 1 \(\mathrm {div}(\nabla q)\in {\mathrm {H}^1(\Omega )}\) and \(\left\| \mathrm {div}(\nabla q)\right\| _{1,\Omega } \le C\left\| \nabla p\right\| _{\mathrm {div},\Omega }\le C\left\| \varvec{f}_h\right\| _{\mathrm {div},\Omega }\).
Collecting the previous estimates, we obtain
and we end the proof. \(\square \)
Now, we are in a position to conclude property P1.
Corollary 1
There exists \(C>0\), independent of h, such that
Proof
Given \(\varvec{v}_h\in \varvec{\mathcal {V}}_h\), we have that \(\varvec{v}_h=\varvec{\psi }_h+\varvec{f}_h\) with \(\varvec{\psi }_h\in \varvec{\mathcal {K}}_h\) and \(\varvec{f}_h\in \varvec{\mathcal {K}}_h^{\bot }\), then
where the last inequality follows from Lemma 9. The proof follows by noting that, since \(\varvec{v}_h=\varvec{\psi }_h+\varvec{f}_h\) is an orthogonal decomposition in \({\mathrm {H}(\mathrm {div};\Omega )}\), we have that \(\left\| \varvec{f}_h\right\| _{\mathrm {div},\Omega }\le \left\| \varvec{v}_h\right\| _{\mathrm {div},\Omega }\). \(\square \)
In order to establish spectral convergence and error estimates, we recall some other basic definitions from spectral theory.
Given a generic linear bounded operator \(\mathbf {S}:\;\varvec{\mathcal {V}}\longrightarrow \varvec{\mathcal {V}}\) defined on a Hilbert space \(\varvec{\mathcal {V}}\), the spectrum of \(\mathbf {S}\) is the set \(\mathrm {sp}(\mathbf {S}):=\left\{ z\in \mathbb {C}: \ \left( z\varvec{I}-\mathbf {S}\right) \text {is not invertible}\right\} \) and the resolvent set of \(\mathbf {S}\) is its complement \(\rho (\mathbf {S}):=\mathbb {C}\setminus \mathrm {sp}(\mathbf {S})\). For any \(z\in \rho (\mathbf {S})\), \(R_z(\mathbf {S}):=\left( z\varvec{I}-\mathbf {S}\right) ^{-1}:\;\varvec{\mathcal {V}}\longrightarrow \varvec{\mathcal {V}}\) is the resolvent operator of \(\mathbf {S}\) corresponding to z.
The following two results are consequence of property P1, see [29, Lemma 1 and Theorem 1].
Lemma 10
Let us assume that P1 holds true and let \(F\subset \rho (\mathbf {T}) \) be closed. Then, there exist positive constants C and \(h_0\) independent of h, such that for \(h<h_0\)
Theorem 4
Let \(U\subset \mathbb {C}\) be an open set containing \(\mathrm {sp}(\mathbf {T})\). Then, there exists \(h_0>0\) such that \(\mathrm {sp}(\mathbf {T}_h)\subset U\) for all \(h<h_0\).
An immediate consequence of this theorem and Corollary 1 is that the proposed virtual element method does not introduce spurious modes with eigenvalues interspersed among those with a physical meaning. Let us remark that such a spectral pollution could be in principle expected from the fact that the corresponding solution operator \(\mathbf {T}\) has an infinite-dimensional eigenvalue \(\mu =1\) (see [15, 18, 19]).
By applying the results from [29, Section 2] to our problem, we conclude the spectral convergence of \(\mathbf {T}_h\) to \(\mathbf {T}\) as \(h\rightarrow 0\). More precisely, let \(\mu \in (0,1)\) be an isolated eigenvalue of \(\mathbf {T}\) with multiplicity m and let \(\mathcal {C}\) be an open circle in the complex plane centered at \(\mu \), such that \(\mu \) is the only eigenvalue of \(\mathbf {T}\) lying in \(\mathcal {C}\) and \(\partial \mathcal {C}\cap \mathrm {sp}(\mathbf {T}) =\emptyset \). Then, according to [29, Section 2], for h small enough there exist m eigenvalues \(\mu ^{(1)}_h, \dots , \mu ^{(m)}_h\) of \(\mathbf {T}_h\) (repeated according to their respective multiplicities) which lie in \(\mathcal {C}\). Therefore, these eigenvalues \(\mu ^{(1)}_h,\dots ,\mu ^{(m)}_h\) converge to \(\mu \) as h goes to zero.
Our next step is to obtain error estimates for the spectral approximation. The classical reference for this issue on non-compact operators is [30]. However, we cannot apply the results from this reference directly to our problem, because of the variational crimes in the bilinear forms used to define the operator \(\mathbf {T}_h\). Therefore, we need to extend the results from this reference to our case. With this purpose, we follow an approach inspired by those of [16, 37].
Consider the eigenspace \(\varvec{\mathcal {E}}\) of \(\mathbf {T}\) corresponding to \(\mu \) and the \(\mathbf {T}_h\)-invariant subspace \(\varvec{\mathcal {E}}_h\) spanned by the eigenspaces of \(\mathbf {T}_h\) corresponding to \(\mu ^{(1)}_h,\dots ,\mu ^{(m)}_h\). As a consequence of Lemma 10, we have for h small enough
Let \(\varvec{P}_h:\;\varvec{\mathcal {V}}\longrightarrow \varvec{\mathcal {V}}_{h}\hookrightarrow \varvec{\mathcal {V}}\) be the projector with range \(\varvec{\mathcal {V}}_h\) defined by the relation
In our case, the bilinear form \(a(\cdot ,\cdot )\) is the inner product of \(\varvec{\mathcal {V}}\), so that \(\left\| \varvec{P}_h\mathbf {u}\right\| _{\mathrm {div},\Omega }\le \left\| \mathbf {u}\right\| _{\mathrm {div},\Omega }\) and
Now, we define \(\widehat{\mathbf {T}}_{h}:=\mathbf {T}_{h}\varvec{P}_h:\;\varvec{\mathcal {V}}\longrightarrow \varvec{\mathcal {V}}_{h}\). Notice that \(\mathrm {sp}(\widehat{\mathbf {T}}_h)=\mathrm {sp}(\mathbf {T}_h)\cup \{0\}\). Furthermore, we have the following result (cf. [30, Lemma 1]).
Lemma 11
There exist \(h_0>0\) and \(C>0\) such that
Proof
Since \(\widehat{\mathbf {T}}_h\) is compact, it suffices to check that \(\Vert (z\varvec{I}-\widehat{\mathbf {T}}_h)\varvec{v}\Vert _{\mathrm {div},\Omega } \ge C\left\| \varvec{v}\right\| _{\mathrm {div},\Omega }\) \(\,\forall \varvec{v}\in \varvec{\mathcal {V}}\) and \(\,\forall z\in \partial \mathcal {C}\). By using (17) and basic properties of the projector \(\varvec{P}_h\), we obtain
where we have used that the curve \(\partial \mathcal {C}\) is bounded away from 0. \(\square \)
Next, we introduce the following spectral projectors (the second one, is well defined at least for h small enough):
-
the spectral projector of \(\mathbf {T}\) relative to \(\mu \): \(\displaystyle \varvec{F}:=\dfrac{1}{2\pi i}\int _{\partial \mathcal {C}}R_z(\mathbf {T})\,dz\);
-
the spectral projector of \(\widehat{\mathbf {T}}_h\) relative to \(\mu _{h}^{(1)},\ldots ,\mu _{h}^{(m)}\): \(\widehat{\varvec{F}}_h:=\dfrac{1}{2\pi i} \displaystyle \int _{\partial \mathcal {C}}R_z(\widehat{\mathbf {T}}_h)\,dz\).
We also introduce the quantities
These two quantities are bounded as follows:
where \(\tilde{s}>1/2\) is such that \(\varvec{\mathcal {E}}\subset [\mathrm {H}^{\tilde{s}}(\Omega )]^2\) (cf. Theorem 2). In fact, the first estimate follows from Lemmas 5 and 6 and Theorem 2(ii), whereas the latter follows from the fact that \(\varvec{\mathcal {E}}\subset \varvec{\mathcal {G}}\cap \varvec{\mathcal {V}}\), Lemma 8 and Theorem 2(ii) again.
The following estimate is a variation of Lemma 3 from [30] that will be used to prove convergence of the eigenspaces.
Lemma 12
There exist positive constants \(h_0\) and C such that, for all \(h<h_0\),
Proof
The first inequality is proved using the same arguments of [30, Lemma 3] and Lemma 11. For the other estimate, let \(\varvec{f}\in \varvec{\mathcal {E}}\), \(\varvec{w}:=\mathbf {T}\varvec{f}\) and \(\varvec{w}_h:=\widehat{\mathbf {T}}_h\varvec{f}=\mathbf {T}_h\varvec{P}_h\varvec{f}\). Note that, by Theorem 2(ii), \(\varvec{f}\in \nabla (\mathrm {H}^{1+\tilde{s}}(\Omega ))\), \(\tilde{s}>1/2\). By using the first Strang lemma (see, for instance, [28, Theorem 4.1.1]), we have
and by proceeding as in the proof of Lemma 9 to derive (16), we obtain
On the other hand,
where, for the last inequality, we have used the same argument as above. Then, we have
where we have used that, for \(\varvec{f}\in \varvec{\mathcal {E}}\), \(\varvec{w}:=\mathbf {T}\varvec{f}=\mu \varvec{f}\). Thus, we conclude the proof. \(\square \)
To prove an error estimate for the eigenspaces, we also need the following result.
Lemma 13
Let
For h small enough, the operator \(\varvec{\Lambda }_h\) is invertible and there exists C independent of h such that
Proof
It follows by proceeding as in the proof of Lemma 2 from [30], by using Lemma 12 and the fact that \(\gamma _{h}\rightarrow 0\) and \(\eta _{h}\rightarrow 0\) as \(h\rightarrow 0\) (cf. (18)). \(\square \)
The following theorem shows that the eigenspace of \(\mathbf {T}_h\) (which coincides with that of \(\widehat{\mathbf {T}}_h\)) approximates the eigenspace of \(\mathbf {T}\).
Theorem 5
There exists \(C>0\) such that,
Proof
It follows by arguing exactly as in the proof of Theorem 1 from [30] and using Lemmas 12 and 13. \(\square \)
Finally, we will prove a double-order error estimate for the eigenvalues. With this aim, let \(\lambda :=\dfrac{1}{\mu }-1\) be the eigenvalue of Problem 1 with eigenspace \(\varvec{\mathcal {E}}\). Let \(\lambda _{h}^{i}:=\dfrac{1}{\mu _{h}^{i}}-1\), \(i=1,\ldots ,m\), be the eigenvalues of Problem 3 with invariant subspace \(\varvec{\mathcal {E}}_{h}\). We have the following result.
Theorem 6
There exist positive constants C and \(h_0\) independent of h, such that, for \(h<h_0\),
Proof
Let \(\varvec{w}_h\in \varvec{\mathcal {E}}_{h}\) be an eigenfunction corresponding to one of the eigenvalues \(\lambda _{h}^{(i)}\) (\(i=1,\dots ,m\)) with \(\left\| \varvec{w}_h \right\| _{\mathrm {div},\Omega }=1\). According to Theorem 5, \(\delta (\varvec{w}_{h},\varvec{\mathcal {E}})\le C\left( \gamma _h+\eta _h\right) \). It follows that there exists \(\varvec{w}\in \varvec{\mathcal {E}}\) such that
Moreover, it is easy to check that \(\varvec{w}\) can be chosen normalized in \({\mathrm {H}(\mathrm {div};\Omega )}\)-norm.
From the symmetry of the bilinear forms and the facts that \(\varvec{w}\) and \(\varvec{w}_h\) are solutions of Problem 1 and 3, respectively, we have
from which we obtain the following identity:
The next step is to estimate each term on the right hand side above. The first and the second ones are easily bounded by using the Cauchy–Schwarz inequality and (19):
For the third term, we use (5) and (6) to write
Then, from the last inequality, the definition of \(\eta _{h}\), the fact that \(\varvec{\Pi }_h\) is an \([\mathrm {L}^2(\Omega )]^2\)-projection and (19), we obtain
On the other hand, from the stability property (8),
hence
Therefore, since \(\lambda _h^{(i)}\rightarrow \lambda \) as h goes to zero, the theorem follows from (20), (21), (22) and the inequality above. \(\square \)
As shown in Theorem 2(ii), the eigenfunctions satisfy additional regularity. The following result shows that this implies an optimal order of convergence for the numerical method.
Corollary 2
If \(\varvec{\mathcal {E}}\subset [\mathrm {H}^{\tilde{s}}(\Omega )]^2\) with \(\tilde{s}>1/2\), then
and
Proof
It follows from the above theorems and the estimates (18). \(\square \)
5 Numerical results
Following the ideas proposed in [8], we have implemented in a MATLAB code a lowest-order VEM (\(k=0\)) on arbitrary polygonal meshes. We report in this section a couple of numerical tests which allowed us to assess the theoretical results proved above.
To complete the choice of the VEM, we had to fix the bilinear form \(S^{E}(\cdot ,\cdot )\) satisfying (5) to be used. To do this, we proceeded as in [7]. For each element \(E\in {\mathcal T}_{h}\) with edges \(e_1,\ldots ,e_{N_E}\), let \(\left\{ \varvec{\varphi }_1, \ldots , \varvec{\varphi }_{N_E}\right\} \) be the dual basis of \(\varvec{\mathcal {V}}_h^E\) associated with the degrees of freedom (1); namely, \(\varvec{\varphi }_i\in \varvec{\mathcal {V}}_h^E\) are such that
Therefore, \(\left\| \varvec{\varphi }_{i}\right\| _{\infty ,E}\simeq \dfrac{1}{h_E}\), namely, there exists \(C>0\) such that
Hence, a natural choice for \(S^{E}(\cdot ,\cdot )\) is given by
where \(\sigma _E\) is the so-called stability constant which will be taken of the order of unity (see for instance [7]).
5.1 Test 1: Rectangular acoustic cavity
In this test, the domain is a rectangle \(\Omega :=(0,a)\times (0,b)\), in which case the exact analytic solution is known. The non vanishing eigenvalues of Problem 1 are given by
while the corresponding eigenfunctions are
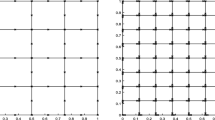
We have used \(a=1\) and \(b=1.1\). The stability constant has been taken \(\sigma _E=1\). First, we have used three different families of meshes (see Fig. 1):
-
\(\mathcal {T}_h^1\): triangular meshes;
-
\(\mathcal {T}_h^2\): rectangular meshes;
-
\(\mathcal {T}_h^3\): hexagonal meshes.
The refinement parameter N used to label each mesh is the number of elements intersecting each edge.

Sample meshes: \(\mathcal {T}_h^1\) (left), \(\mathcal {T}_h^2\) (middle) and \(\mathcal {T}_h^{3}\) (right). In all of them \({N=9}\)
Let us remark that for triangular and rectangular meshes like \(\mathcal {T}_h^1\) and \(\mathcal {T}_h^2\), respectively, the discrete spaces \(\varvec{\mathcal {V}}_h\) coincide with those of the standard lowest-order Raviart–Thomas discretization. However, the resulting discrete problems are not the same. In fact, the matrices corresponding to the left-hand side of Problem 3 also coincide, but this does not happen with the matrices corresponding to right-hand side.
We report in Table 1 the scaled lowest eigenvalues \(\widehat{\lambda }_{hi}:=\lambda _{hi}/\pi ^{2}\) computed with the method analyzed in this paper. The table also includes estimated orders of convergence. The exact scaled eigenvalues are also reported in the last column to allow for comparison.
It can be seen from Table 1 that the computed eigenvalues converge to the exact ones with an optimal quadratic order as predicted by the theory in all the cases.
Figure 2 shows plots of the computed eigenfunctions \(\varvec{w}_{h1}\) and \(\varvec{w}_{h3}\) corresponding to the first and third lowest eigenvalues, respectively. The figure also includes the corresponding pressure fluctuation \(p_{hi}=-\mathrm {div}\varvec{w}_{hi}\), \(i=1,3\). In both cases, the eigenfunctions have been computed on an hexagonal mesh \(\mathcal {T}_h^3\) with \(N=27\).

Eigenfunctions of the acoustic problem corresponding to the first and the third lowest eigenvalues: displacement field \(\varvec{w}_{h1}\) (upper left), pressure fluctuation \(p_{h1}\) (upper right), displacement field \(\varvec{w}_{h3}\) (bottom left), pressure fluctuation \(p_{h3}\) (bottom right)
The families of meshes used so far in this test are almost uniform. In order to check whether the quadratic order of convergence holds in general, we have made a second test with more general polygonal meshes \(\mathcal {T}_{h}^{4}\) like those shown in Fig. 3. Such polygonal meshes are generated by a standard Voronoi procedure based on random seeds and without any further iteration to regularize the grid.

Sample of Voronoi meshes \(\mathcal {T}_{h}^{4}\) with \({N=7}\) (left), \({N=16}\) (middle) and \({N=32}\) (right)
We report in Table 2 the same information as in Table 1, but using the unstructured meshes \(\mathcal {T}_{h}^{4}\). Similar conclusions as in the previous test follow from this table.
5.2 Test 2: weakening the mesh assumptions
The aim of this test is to analyze the influence of the mesh assumptions. In this test we compare the performance of VEM when the geometric assumption \(\mathbf {A_1}\) is violated. With this end we have used four different families of meshes (see Fig. 4):
-
\(\mathcal {T}_h^5\): trapezoidal meshes which consist of partitions of the domain into \(N\times N\) congruent trapezoids taking the middle point of each edge as a new degree of freedom; note that each element has 8 edges.
-
\(\mathcal {T}_h^6\): polygonal meshes built from \(\mathcal {T}_h^5\) by moving the added point on each edge e to a distance \(h_e^{2}\) from one vertex and \((h_{e}-h_{e}^{2})\) from the other (\(h_{e}\) being the length of the edge e).
-
\(\mathcal {T}_h^7\): regular polygonal meshes built from \(\mathcal {T}_h^1\) by considering the middle point of each edge as a new degree of freedom; note that each element has 6 edges.
-
\(\mathcal {T}_h^8\): polygonal meshes built from \(\mathcal {T}_h^7\) by moving the added point on each edge e to a distance \(h_e^{2}\) from one vertex and \((h_{e}-h_{e}^{2})\) from the other.
While the families of meshes \(\mathcal {T}_h^5\) and \(\mathcal {T}_h^7\) clearly satisfy assumptions \(\mathbf {A_1}\) and \(\mathbf {A_2}\), this is not the case for \(\mathcal {T}_h^6\) and \(\mathcal {T}_h^8\). In fact, the latter satisfy \(\mathbf {A_2}\) but fail to satisfy \(\mathbf {A_1}\), since the length of the smallest edge is \(h_e^2\) while the diameter of the element is bounded above by a multiple of \(h_e\).

Sample meshes: \(\mathcal {T}_h^5\) (upper left), \(\mathcal {T}_h^6\) (upper right), \(\mathcal {T}_h^{7}\) (bottom left) and \(\mathcal {T}_h^8\) (bottom right). In all of them \({N=8}\)
We report in Table 3 the scaled lowest eigenvalues \(\widehat{\lambda }_{hi}:=\lambda _{hi}/\pi ^{2}\) computed with the method analyzed in this paper. The table also includes estimated orders of convergence. The exact scaled eigenvalues are also reported in the last column to allow for comparison.
It can be seen from Table 3 that the computed eigenvalues converge to the exact ones with an optimal quadratic order as predicted by the theory when assumption \(\mathbf {A_1}\) is satisfied (\(\mathcal {T}_h^5\) and \(\mathcal {T}_h^7\)). However, when the mesh assumption \(\mathbf {A_1}\) is violated (\(\mathcal {T}_h^6\) and \(\mathcal {T}_h^8\)), the method still converges but the order of convergence deteriorates. The analysis of this method without assumption \(\mathbf {A_1}\) needs further research.
5.3 Test 3: effect of the stability constant \(\sigma _E\)
The aim of this test is to analyze the influence of the stability constant \(\sigma _E\) on the computed spectrum, to know whether the quality of the computations can be affected by this constant. Such a behavior was observed in the VEM solution of different eigenvalue problems. In particular, it was demonstrated in [38] that certain VEM discretizations of the Steklov eigenvalue problem introduces spurious eigenvalues which can be well separated from the physical spectrum by choosing appropriately the stability constant \(\sigma _E\).
In the present case, no spurious eigenvalue was detected for any choice of the stability constant. However, for large values of \(\sigma _E\), the eigenvalues computed with coarse meshes could be very poor. The aim of this test is to analyze the influence of the stability constant \(\sigma _E\) on the computed spectrum.
We report in Table 4 the lowest eigenvalue computed with varying values of \(\sigma _E\) on the family of meshes \({\mathcal T}_{h}^2\) (see Fig. 1, middle). The table also includes the estimated order of convergence.
It can be seen from Table 4 that for values of the parameter \(\sigma _E\le 1\) the computed eigenvalues depend very mildly on this parameter. Moreover, this dependence becomes weaker, as the mesh is refined or \(\sigma _E\) is taken smaller. In fact, it can be seen from this table that even the value \(\sigma _E=0\) yields very accurate results, in spite of the fact that for such a value of the parameter the stability estimate and hence most of the proofs of the theoretical results do not hold. On the other hand, it can be seen from Table 4 that the numerical results depend much more significantly on this parameter \(\sigma _E\) when it is chosen larger. In such a case, the results for coarse meshes are poorer and more refined meshes are needed for the computed eigenvalues to lie close to the exact ones.
This analysis suggests that the user of \(\mathrm {H}(\mathrm {div})\) VEM for this kind of spectral problems has to be aware of the risk of degeneration of the eigenvalues for certain values of the stability constant \(\sigma _E\). The way of minimizing this risk in this case is to take small values of \(\sigma _E\) (what “small” means in a real problem will of course depend on the value of the physical constants).
6 Conclusions
The mathematical and numerical analysis of the approximation by virtual elements of the acoustic vibration problem was addressed in this paper. A variational formulation of the spectral problem based on fluid displacements and a virtual element discretization of \(\mathrm {H}(\mathrm {div})\) with vanishing rotor was proposed. The introduced method allows to make use of very general polygonal meshes and, for moderate to high values of the degree k, is also preferable in terms of degrees of freedom with respect to more standard schemes. It was proved that the virtual scheme generates approximations of optimal order. The theoretical results were validated numerically. It was also shown that violating the mesh assumptions may deteriorate the order of convergence. The numerical results included a numerical test to check the influence of the stability constant. No spurious eigenvalues were found for any chosen stability constant. However, for large values of this constant, the eigenvalues calculated with coarse meshes could be very poor.
References
Ahmad, B., Alsaedi, A., Brezzi, F., Marini, L.D., Russo, A.: Equivalent projectors for virtual element methods. Comput. Math. Appl. 66, 376–391 (2013)
Antonietti, P.F., Beirão da Veiga, L., Mora, D., Verani, M.: A stream virtual element formulation of the Stokes problem on polygonal meshes. SIAM J. Numer. Anal. 52, 386–404 (2014)
Antonietti, P.F., Beirão da Veiga, L., Scacchi, S., Verani, M.: A \(C^1\) virtual element method for the Cahn–Hilliard equation with polygonal meshes. SIAM J. Numer. Anal. 54, 36–56 (2016)
Antonietti, P.F., Houston, P., Sarti, M., Verani, M.: Multigrid algorithms for \(hp\)-version interior penalty discontinuous Galerkin methods on polygonal and polyhedral meshes. arXiv:1412.0913 [math.NA] (2014, preprint)
Ayuso de Dios, B., Lipnikov, K., Manzini, G.: The nonconforming virtual element method. ESAIM Math. Model. Numer. Anal. 50, 879–904 (2016)
Babuška, I., Osborn, J.: Eigenvalue problems. In: Ciarlet, P.G., Lions, J.L. (eds.) Handbook of Numerical Analysis, vol. II, pp. 641–787. North-Holland, Amsterdam (1991)
Beirão da Veiga, L., Brezzi, F., Cangiani, A., Manzini, G., Marini, L. D., Russo, A.: Basic principles of virtual element methods. Math. Models Methods Appl. Sci. 23, 199–214 (2013)
Beirão da Veiga, L., Brezzi, F., Marini, L.D., Russo, A.: The hitchhiker’s guide to the virtual element method. Math. Models Methods Appl. Sci. 24, 1541–1573 (2014)
Beirão da Veiga, L., Brezzi, F., Marini, L. D., Russo, A.: Mixed virtual element methods for general second order elliptic problems on polygonal meshes. ESAIM. Math. Model. Numer. Anal. 50, 727–747 (2016)
Beirão da Veiga, L., Lipnikov, K., Manzini, G.: The Mimetic Finite Difference Method for Elliptic Problems, MS&A, vol. 11. Springer, Berlin (2014)
Beirão da Veiga, L., Lovadina, C., Mora, D.: A virtual element method for elastic and inelastic problems on polytope meshes. Comput. Methods Appl. Mech. Eng. 295, 327–346 (2015)
Beirão da Veiga, L., Lovadina, C., Vacca, G.: Divergence free virtual elements for the Stokes problem on polygonal meshes. ESAIM. Math. Model. Numer. Anal. (2016). doi:10.1051/m2an/2016032
Benedetto, M.F., Berrone, S., Borio, A., Pieraccini, S., Scialò, S.: Order preserving SUPG stabilization for the virtual element formulation of advection-diffusion problems. Comput. Methods Appl. Mech. Eng. 311, 18–40 (2016)
Benedetto, M.F., Berrone, S., Pieraccini, S., Scialò, S.: The virtual element method for discrete fracture network simulations. Comput. Methods Appl. Mech. Eng. 280, 135–156 (2014)
Bermúdez, A., Durán, R., Muschietti, M.A., Rodríguez, R., Solomin, J.: Finite element vibration analysis of fluid-solid systems without spurious modes. SIAM J. Numer. Anal. 32, 1280–1295 (1995)
Bermúdez, A., Durán, R., Rodríguez, R., Solomin, J.: Finite element analysis of a quadratic eigenvalue problem arising in dissipative acoustics. SIAM J. Numer. Anal. 38, 267–291 (2000)
Bermúdez, A., Gamallo, P., Hervella-Nieto, L., Rodríguez, R., Santamarina, D.: Fluid-structure acoustic interaction. In: Marburg, S., Nolte, B. (eds.) Computational Acoustics of Noise Propagation in Fluids. Finite and Boundary Element Methods, Chap. 9, pp. 253–286. Springer, New York (2008)
Bermúdez, A., Rodríguez, R.: Finite element computation of the vibration modes of a fluid-solid system. Comput. Methods Appl. Mech. Eng. 119, 355–370 (1994)
Boffi, D.: Finite element approximation of eigenvalue problems. Acta Numer. 19, 1–120 (2010)
Boffi, D., Gardini, F., Gastaldi, L.: Some remarks on eigenvalue approximation by finite elements. In: Frontiers in Numerical Analysis—Durham 2010. Lect. Notes Comput. Sci. Eng., vol. 85, pp. 1–77. Springer, Heidelberg (2012)
Brenner, S.C., Scott, R.L.: The Mathematical Theory of Finite Element Methods. Springer, New York (2008)
Brezzi, F., Falk, R.S., Marini, L.D.: Basic principles of mixed virtual element methods. ESAIM Math. Model. Numer. Anal. 48, 1227–1240 (2014)
Brezzi, F., Marini, L.D.: Virtual elements for plate bending problems. Comput. Methods Appl. Mech. Eng. 253, 455–462 (2012)
Caceres, E., Gatica, G.N.: A mixed virtual element method for the pseudostress-velocity formulation of the Stokes problem. IMA J. Numer. Anal. (2016). doi:10.1093/imanum/drw002
Cangiani, A., Georgoulis, E.H., Houston, P.: \(hp\)-version discontinuous Galerkin methods on polygonal and polyhedral meshes. Math. Models Methods Appl. Sci. 24, 2009–2041 (2014)
Cangiani, A., Manzini, G., Sutton, O.J.: Conforming and nonconforming virtual element methods for elliptic problems. IMA J. Numer. Anal. (2016). doi:10.1093/imanum/drw036
Chinosi, C., Marini, L.D.: Virtual element method for fourth order problems: \({\rm L}^2\)-estimates. Comput. Math. Appl. 72, 1959–1967 (2016)
Ciarlet, P.G.: The Finite Element Method for Elliptic Problems. SIAM, Philadelphia (2002)
Descloux, J., Nassif, N., Rappaz, J.: On spectral approximation. Part 1: the problem of convergence. RAIRO Anal. Numér. 12, 97–112 (1978)
Descloux, J., Nassif, N., Rappaz, J.: On spectral approximation. Part 2: error estimates for the Galerkin method. RAIRO Anal. Numér. 12, 113–119 (1978)
Di Pietro, D., Ern, A.: A hybrid high-order locking-free method for linear elasticity on general meshes. Comput. Methods Appl. Mech. Eng. 283, 1–21 (2015)
Di Pietro, D., Ern, A.: Hybrid high-order methods for variable-diffusion problems on general meshes. C. R. Acad. Sci., Paris I, 353, 31–34 (2015)
Gain, A.L., Paulino, G.H., Duarte, L.S., Menezes, I.F.M.: Topology optimization using polytopes. Comput. Methods Appl. Mech. Eng. 293, 411–430 (2015)
Gain, A.L., Talischi, C., Paulino, G.H.: On the virtual element method for three-dimensional linear elasticity problems on arbitrary polyhedral meshes. Comput. Methods Appl. Mech. Eng. 282, 132–160 (2014)
Hamdi, M., Ousset, Y., Verchery, G.: A displacement method for the analysis of vibrations of coupled fluid-structure systems. Int. J. Numer. Methods Eng. 13, 139–150 (1978)
Kiefling, L., Feng, G.C.: Fluid-structure finite element vibrational analysis. AIAA J. 14, 199–203 (1976)
Lovadina, C., Mora, D., Rodríguez, R.: Approximation of the buckling problem for Reissner–Mindlin plates. SIAM J. Numer. Anal. 48, 603–632 (2010)
Mora, D., Rivera, G., Rodríguez, R.: A virtual element method for the Steklov eigenvalue problem. Math. Models Methods Appl. Sci. 25, 1421–1445 (2015)
Perugia, I., Pietra, P., Russo, A.: A plane wave virtual element method for the Helmholtz problem. ESAIM Math. Model. Numer. Anal. 50, 783–808 (2016)
Rivera, G.: Virtual element methods for spectral problems. Ph.D. thesis in Applied Sciences, major in Mathematical Engineering, Universidad de Concepción, Chile (2016). http://www.ci2ma.udec.cl/publicaciones/tesisposgrado/graduado.php?id=44
Rodríguez, R., Solomin, J.: The order of convergence of eigenfrequencies in finite element approximations of fluid-structure interaction problems. Math. Comput. 65, 1463–1475 (1996)
Sukumar, N., Tabarraei, A.: Conforming polygonal finite elements. Int. J. Numer. Methods Eng. 61, 2045–2066 (2004)
Talischi, C., Paulino, G.H., Pereira, A., Menezes, I.F.M.: Polygonal finite elements for topology optimization: a unifying paradigm. Int. J. Numer. Methods Eng. 82, 671–698 (2010)
Vacca, G.: Virtual element methods for hyperbolic problems on polygonal meshes. Comput. Math. Appl. (2016). doi:10.1016/j.camwa.2016.04.029
Vacca, G., Beirão da Veiga, L.: Virtual element methods for parabolic problems on polygonal meshes. Numer. Methods Partial Differ. Equ. 31, 2110–2134 (2015)
Wriggers, P., Rust, W.T., Reddy, B.D.: A virtual element method for contact. Comput. Mech. 58, 1039–1050 (2016)
Zienkiewicz, O.C., Taylor, R.L.: The Finite Element Method, vol. 2. McGraw-Hill, London (1991)
Author information
Authors and Affiliations
Corresponding author
Additional information
D. Mora was partially supported by CONICYT (Chile) through FONDECYT Project No. 1140791, by DIUBB through Project 151408 GI/VC, Universidad del Bío-Bío and by Anillo ANANUM, ACT1118, CONICYT (Chile). G. Rivera was partially supported by a CONICYT (Chile) fellowship and by BASAL Project, CMM, Universidad de Chile. R. Rodríguez was partially supported by BASAL Project, CMM, Universidad de Chile, by Anillo ANANUM, ACT1118, CONICYT (Chile) and by Red Doctoral REDOC.CTA, MINEDUC Project UCO1202 at Universidad de Concepción (Chile).
Appendix
Appendix
We derive in this appendix optimal approximation properties for the \(\mathrm {H}(\mathrm {div})\) virtual element with vanishing rotor introduced in Sect. 3. The main goal of this appendix will be to prove the error estimates stated in Lemmas 5 and 6 for the \(\varvec{\mathcal {V}}_h\)-interpolant defined by (9) and (10). Let us remark that these results could be useful for other applications as well.
Our first result, whose proof is quite straightforward, is a commuting diagram property and some consequences that follow from it. We recall that \(P_k\) denotes the \(\mathrm {L}^2(\Omega )\)-orthogonal projection onto the subspace \(\left\{ q\in \mathrm {L}^2(\Omega ): q|_E\in \mathbb {P}_k(E)\quad \forall E\in \mathcal {T}_h\right\} \).
Lemma 5
Let \(\varvec{v}\in \varvec{\mathcal {V}}\) be such that \(\varvec{v}\in [{\mathrm {H}^{t}(\Omega )}]^2\) with \(t>1/2\). Let \(\varvec{v}_I\in \varvec{\mathcal {V}}_h\) be its interpolant defined by (9) and (10). Then,
Consequently, for all \(E\in \mathcal {T}_h\), \(\left\| \mathrm {div}\varvec{v}_I \right\| _{0,E}\le \left\| \mathrm {div}\varvec{v}\right\| _{0,E}\) and, if \(\mathrm {div}\varvec{v}|_{E}\in {\mathrm {H}^{r}(E)}\) with \(r\ge 0\), then
Proof
As a consequence of (9) and (10), for every element E and for every \(q\in \mathbb {P}_k(E)\)
Since \(\mathrm {div}\varvec{v}_{I}\in \mathbb {P}_k(E)\), we have that
Therefore,
Additionally, if \(\mathrm {div}\varvec{v}|_{E}\in {\mathrm {H}^{r}(E)}\) with r a non-negative integer, as a consequence of [21, Lemma 4.3.8], we have that for every \(E\in \mathcal {T}_h\)
Thus, the second estimate of the lemma follows by standard Banach space interpolation. \(\square \)
In order to prove Lemma 6 about the \(\mathrm {L}^2(\Omega )\) approximation property of this interpolant, we need several previous results. We begin with the following local trace estimate on polygons.
Lemma 14
Let \(\varvec{v}\in \varvec{\mathcal {V}}\) and \(E\in \mathcal {T}_{h}\) such that \(\varvec{v}|_{E}\in [{\mathrm {H}^{t}(E)}]^2\) with \(t\in (1/2,1]\). Then, there exists \(C>0\) such that
Proof
Consider the triangulation \(\mathcal {T}_h^{E}\) of the element E obtained by joining each vertex of E with the midpoint of the ball with respect to which E is star-shaped. Since we are assuming that the meshes satisfy \(\mathbf {A_1}\) and \(\mathbf {A_2}\), the triangles \(T\in \mathcal {T}_h^{E}\) have a shape ratio (i.e., the quotient between outer and inner diameters) bounded above by a constant that only depends on \(C_\mathcal {T}\). Moreover, each triangle \(T\in \mathcal {T}_h^{E}\) has one edge on \(\partial E\). Hence, a scaling argument and a trace inequality in the reference triangular element allow us to conclude the proof. \(\square \)
In order to prove an \(\mathrm {L}^2(\Omega )\) error estimate for the interpolant \(\varvec{v}_{I}\), we will introduce a basis of \(\varvec{\mathcal {V}}_h^E\) dual to the degrees of freedom (1) and (2).
Let \(E\in {\mathcal T}_{h}\) with edges \(e_1,\ldots ,e_{N_E}\) and \(F:E\longrightarrow \widehat{E}\) be an affine mapping of the form
where \(\varvec{x}_{E}=(x_E,y_E)^T\) is the center of the ball with respect to which E is star-shaped according to assumption \(\mathbf {A_2}\). Note that \(\widehat{E}:=F(E)\) has diameter 1. Moreover, F maps the above mentioned ball onto a ball of radius \(C_{\mathcal {T}}\) with \(0<C_{\mathcal {T}}\le 1 \) and \(C_{\mathcal {T}}\) independent of \(h_E\), Moreover, \(\widehat{E}\) is star-shaped with respect to each point of this ball.
We define the following basis of \(\mathbb {P}_k(E):\)
with the constant \(C_{s}\in {\mathbb {R}}\) such that \(\int _{E}p_{s}=0\). We have associated above each \(s=1,\ldots ,\widetilde{N}:=\mathrm {dim}(\mathbb {P}_k(E))-1\) with one particular couple \((\alpha _{1},\alpha _{2})\), by fixing a particular ordering of these couples. Therefore, the set \(\left\{ p_0,p_1,\ldots ,p_{\widetilde{N}}\right\} \) is a basis for \(\mathbb {P}_k(E)\) that satisfies \(\int _Ep_s=0\) for \( s=1,\ldots ,\widetilde{N}\). Let now \(\widehat{p}_{s}:=p_{s}\circ F^{-1}\) be defined in \(\widehat{E}\). Then, for the particular \((\alpha _{1},\alpha _{2})\) associated with s, we have that \(\widehat{p}_{s}(\widehat{x}, \widehat{y}) =\widehat{x}^{\alpha _{1}}\widehat{y}^{\alpha _{2}} +C_{s}\). Moreover, since \(\left| E\right| =h_E^2|\widehat{E}|\), we have
As a consequence, note that \(\left| C_s\right| \le 1\) and, hence, \(\left\| p_s\right\| _{\infty ,E} =\left\| \widehat{p}_s \right\| _{ \infty ,\widehat{E}}\le 2\), \(s=0,\ldots ,\widetilde{N}\).
For each edge \(e_l\) of E (\(l=1,\ldots ,N_E\)), let \(T_{l}\) be the affine function mapping \(\widehat{e}:=[-1,1]\) onto \(e_l\). We define \(q_l^i:=\widehat{q}\,^{i}\circ T_{l}^{-1}\) (\(i=1,\dots ,k\)) with \(\widehat{q}\,^{i}\) being the Legendre polynomials on \([-1,1]\) normalized by \(\widehat{q}\,^{i}(1)=1\). Then, \(\left\{ q_l^0, \ldots ,q_{l}^k\right\} \) is a basis of \(\mathbb {P}_k(e_l)\) which satisfies \(q_l^0=1\), \(\int _{e_l} q_l^iq_l^j\,ds=\delta _{ij}\), \( i,j=1,\ldots ,k\), and \(\left\| q_l^i\right\| _{\infty ,e_l}=1\). Note that, in particular, \(\int _{e_l} q_l^i\,ds=0\), \( i=1,\ldots ,k\).
Therefore,
are bases for the spaces of test functions appearing in the degrees of freedom (9) and (10), respectively. Next, we introduce a set of dual basis functions for \(\varvec{\mathcal {V}}_h^E\):
The first ones, \(\varvec{\varphi }_{l}^i\), are the “boundary basis functions” determined by
Note that these boundary basis functions use two indexes, i and l, one for the moment and the other for the edge. On the other hand, note also that as a consequence of (24) and (25) \(\varvec{\varphi }_l^i\cdot \varvec{n}=0\) on \(\partial E\setminus e_{l}\) The second kind of functions in (23), \(\widetilde{\varvec{\varphi }}^s\), are the “internal basis functions” determined by
Remark 5
Since \(\mathrm {div}\varvec{\varphi }_{l}^i\in \mathbb {P}_k(E) =\mathrm {span}\left\{ 1,p_1,\ldots ,p_s\right\} \) and \(\int _Ep_{s}=0\) for \(s=1,\ldots ,\widetilde{N}\), Eq. (26) implies that \(\mathrm {div}\varvec{\varphi }_{l}^i\) has to be constant. Therefore,
Moreover, thanks to (25), we have that
Then,
Next goal is to prove that all the functions in (23) are bounded uniformly in h. We begin with the boundary basis functions.
Lemma 15
There exists \(C>0\) such that \(\left\| \varvec{\varphi }_{l}^i\right\| _{0,E}\le C\) for \(l=1,\ldots ,N_{E}\) and \(i=0,\ldots ,k\).
Proof
Since \(\varvec{\varphi }_{l}^i\in \varvec{\mathcal {V}}_h^E\), we know that \(\mathrm {rot}\varvec{\varphi }_{l}^i=0\). Therefore, there exists \(\gamma \in {\mathrm {H}^1(E)}\) such that \(\varvec{\varphi }_{l}^i=\nabla \gamma \). Hence, from the remark above and (25), we have that \(\gamma \) is a solution of the following problem:
It is easy to check that these Neumann problems are compatible. Therefore,
Now, taking \(\zeta =\gamma \), we obtain
where we have used Lemma 14 with \(t=1\), the generalized Poincaré inequality and a scaling argument. Now, because of (25) with \(m=l\) and the orthogonality property of Legendre polynomials, \(\left. \varvec{\varphi }_l^i\cdot \varvec{n}\right| _{e_l} =\left( \int _{e_l}\left( q^{i}_l\right) ^2\,ds\right) ^{-1}q_l^i\). Therefore,
Thus, from the last two estimates we derive that \(\left\| \varvec{\varphi }_{l}^i\right\| _{0,E}\le C\) and we end the proof. \(\square \)
Next, we show a similar result for the internal basis functions.
Lemma 16
There exists \(C>0\) such that \(\left\| \widetilde{\varvec{\varphi }}^s \right\| _{0,E}\le C\) for \(s=1,\ldots ,\widetilde{N}\).
Proof
Since \(\widetilde{\varvec{\varphi }}^s\in \varvec{\mathcal {V}}_h^E\), there exists \(\gamma \in {\mathrm {H}^1(E)}\) such that \(\widetilde{\varvec{\varphi }}^s=\nabla \gamma \). Hence, by virtue of (28), we have that \(\gamma \) is a solution of the following well posed Neumann problem:
Therefore,
where \(\psi ^s:=\mathrm {div}\widetilde{\varvec{\varphi }}^s\). Now, taking \(\zeta =\gamma \) and using the generalized Poincaré inequality and a scaling argument, we have that
Thus,
On the other hand, since \(\psi ^s\in \mathbb {P}_k(E)\), it is easy to check that
where \(\widehat{\psi }^{s} :=(\psi ^{s}\circ F^{-1})\in \mathbb {P}_k ( \widehat{E})\).
For \(\widehat{\psi }^{s}\in \mathbb {P}_k(\widehat{E})\), we write \(\widehat{\psi }^{s}=\sum _{i=1}^{\widetilde{N}}\beta _i^s\widehat{p}_i\) and, since \(\left\| \widehat{p}_{i}\right\| _{\infty ,\widehat{E}}\le 2\), we have that
Now, from (29), a change of variables from E to \(\widehat{E}\) yields
which can be written as
Let
Therefore, from (33), if \(\varvec{M}\) is invertible, then \(\varvec{\beta }^s=\begin{pmatrix}\beta _1^s&\cdots&\beta _{\widetilde{N}}^s\end{pmatrix}^T\) is equal to \(h_{E}^{-2}\) times the s-th column of \(\varvec{M}^{-1}\).
Next, we will show that \(\varvec{M}\) is invertible and that its inverse is bounded uniformly in h. With this aim, note that the polygon \(\widehat{E}\) is uniquely defined by the vector \(((\widehat{x}_1, \widehat{y}_1),\ldots , (\widehat{x}_{N_E}, \widehat{y}_{N_E})) \in {\mathbb {R}}^{2N_{E}}\) that collects the coordinates of its (ordered) vertexes. Let \(U\subset {\mathbb {R}}^{2N_{E}}\), be the set of all possible values of these coordinates such that the mesh regularity assumptions \(\mathbf {A_1}\) and \(\mathbf {A_2}\) are satisfied. Since the diameter of \(\widehat{E}\) is equal to 1, U is a bounded set. On the other hand, the constraints that arise from hypotheses \(\mathbf {A_1}\) and \(\mathbf {A_2}\) yield that U is a closed set. Therefore U is compact.
The function from U into \({\mathbb {R}}^{\widetilde{N}\times \widetilde{N}}\) that maps the coordinates of the vertexes of \(\widehat{E}\) into the entries of the matrix \(\varvec{M}\) is a continuous function. Moreover, for any coordinates in U, \(\widehat{E}\) satisfies \(\mathbf {A_1}\) and \(\mathbf {A_2}\) and, hence, it contains a ball of radius \(C_\mathcal {T}\). Let us show that this implies that \(\varvec{M}\) has to be positive definite. In fact, given \(\alpha \in {\mathbb {R}}^{\widetilde{N}}\), \(\alpha ^{T} \varvec{M}\alpha = \int _{\widehat{E}} |\sum _{r=1}^{\widetilde{N}} \alpha _{r} \widehat{p}_{r}|^{2} \ge 0\) and the equality holds only if \(\sum _{r=1}^{\widetilde{N}}\alpha _{r}\widehat{p}_{r}\) vanishes a.e. in \(\widehat{E}\), which in turn implies that \(\alpha \) has to vanish (since \(\widehat{E}\) contains a ball of radius \(C_\mathcal {T}>0\)). Thus, \(\varvec{M}\) is positive definite and hence invertible. Therefore, taking also into account the continuity of the mapping \(\varvec{M}\longmapsto \varvec{M}^{-1}\) for invertible matrices, we conclude that the mapping
is well defined and continuous and, hence, bounded above in the compact set U. Consequently, from (33),
which recalling (32) yields
Let us remark that, in principle, the constant C above depends on the number \(N_E\) of vertexes of E. However, by virtue of assumption \(\mathbf {A_1}\), this number is bounded above in terms of \(C_{{\mathcal T}}\). Therefore, \(N_E\) can take only a finite number of possible values and, hence, (34) holds true with C only depending on \(C_{{\mathcal T}}\). Thus, we conclude the proof by combining (30), (31) and (34). \(\square \)
Now, we are in a position to prove \(\mathrm {L}^2(\Omega )\) error estimates for the \(\varvec{\mathcal {V}}_h\)-interpolant.
Lemma 6
Let \(\varvec{v}\in \varvec{\mathcal {V}}\) be such that \(\varvec{v}\in [{\mathrm {H}^{t}(\Omega )}]^2\) with \( t >1/2\). Let \(\varvec{v}_I\in \varvec{\mathcal {V}}_h\) be its interpolant defined by (9) and (10). Let \(E\in \mathcal {T}_h\). If \(1\le t\le k+1\), then
whereas, if \(1/2 <t\le 1\), then
Proof
First, we consider the case \(1\le t\le k+1\). The first step is to bound \(\left\| \varvec{v}_I\right\| _{0,E}\). Since \(\varvec{v}_{I}\in \varvec{\mathcal {V}}_{h}^{E}\), thanks to (24)–(29) we write it in the basis (23) as follows:
Therefore, from Lemmas 15 and 16 we have
Then, by using that \(\left\| q_{l}^{i}\right\| _{\infty ,e_{l}}\!\!\!=1\) for \(i=1,\dots ,k\) and \(l=1,\ldots ,N_{E}\), \(\left\| p_{s}\right\| _{\infty ,E}\le C\) for \(s=1,\dots ,\widetilde{N}\), the Cauchy–Schwarz inequality and Lemma 14, we obtain
Now, for all \(\varvec{v}_k\in [\mathbb {P}_k(E)]^2\) we note that \((\varvec{v}_k)_I=\varvec{v}_k\) and, hence, using the above estimate for \(\varvec{v}-\varvec{v}_{k}\), we write
Thus, by choosing \(\varvec{v}_{k}\) as in [7, Proposition 4.2], we have that \(\left\| \varvec{v}-\varvec{v}_k\right\| _{0,E} +h_E \left| \varvec{v}-\varvec{v}_k \right| _{1,E}\le C h_E^t\left| \varvec{v}\right| _{t,E}\), which together with the above inequality allow us to conclude (35).
Next, we consider the case \(1/2 <t\le 1\). Using the same arguments as above, we obtain in this case instead of (37),
Therefore, repeating again the arguments above with \(\varvec{v}_0\in [\mathbb {P}_0(E)]^2\) instead of \(\varvec{v}_{k}\), we have
where we have used again [7, Proposition 4.2]. Thus, the proof is complete. \(\square \)
Remark 6
Estimate (36) can be improved for \(k=0\) and \(1/2<t\le 1\). In fact, in such a case, the interpolant \(\varvec{v}_I\in \varvec{\mathcal {V}}_h\) is defined only by (9). Hence,
and repeating the arguments above we obtain
instead of (38), which leads to
Rights and permissions
About this article

Cite this article
Beirão da Veiga, L., Mora, D., Rivera, G. et al. A virtual element method for the acoustic vibration problem. Numer. Math. 136, 725–763 (2017). https://doi.org/10.1007/s00211-016-0855-5
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00211-016-0855-5