
Abstract
In this paper we prove a conjecture of Alexander and Currier that states, except for covering maps of equidistant surfaces in hyperbolic 3-space, a complete, nonnegatively curved immersed hypersurface in hyperbolic space is necessarily properly embedded.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Suppose that \(\phi :M^{n}\rightarrow \mathbb {R}^{n+1}\) is an immersed hypersurface with principal curvatures \(\kappa _{1},\ldots ,\kappa _{n}\). Then \(\phi \) is said to be
-
convex at a point if \(\kappa _{i}\ge 0\) for all \(i=1,\dots ,n\).
-
of nonnegative Ricci curvature if \(\kappa _{i}(\sum \nolimits _{k=1}^{n}\kappa _{k})\ge \kappa _{i}^{2}\) for all \(i=1,\ldots ,n\).
-
nonnegatively curved if \(\kappa _{i}\kappa _{j}\ge 0\) for all \(i,j=1,\ldots ,n\).
It is easily seen that up to orientation all three of the curvature conditions above are pointwise equivalent for hypersurfaces immersed in Euclidean space. An immersed hypersurface in Euclidean space is said to be locally convex if the hypersurface is locally supported by a hyperplane. It is not true that nonnegativity of the sectional curvatures alone implies local convexity of a hypersurface (cf. [23]).
The study of nonnegatively curved immersed hypersurfaces goes back to Hadamard, who showed that a compact, strictly convex, immersed surface in Euclidean 3-space is necessarily embedded [20]. This result was later extended in [11, 23, 28, 31] to such that a complete, nonnegatively curved, nonflat, immersed hypersurface in Euclidean space is necessarily embedded as a boundary of a convex body.
In this paper we consider oriented immersed hypersurfaces \(\phi :M^{n}\rightarrow \mathbb {H}^{n+1}\) in hyperbolic space. The following pointwise curvature conditions are no longer equivalent:
-
(strictly) convex at a point if \(\kappa _{i} > 0\) for all \(i=1,\dots ,n\).
-
nonnegative Ricci curvature if \(\kappa _{i}(\sum _{k=1}^{n}\kappa _{k})\ge n-1+\kappa _{i}^{2}\) for all \(i=1,\dots ,n\).
-
nonnegatively curved if \(\kappa _{i}\kappa _{j}\ge 1\) for all \(i,j=1,\dots ,n\).
-
(non-strictly) horospherically convex if \(\kappa _{i}\ge 1\) for all \(i=1,\dots ,n\).
In fact, they are in strictly ascending order as listed above (cf. [1, 2, 15, 16]). Do Carmo and Warner [14] showed that a compact, convex, immersed hypersurface in hyperbolic space is necessarily embedded. For noncompact cases, even with strict convexity, a complete, immersed hypersurface in hyperbolic space may not be embedded [16] (see also [27], pg. 84). On the other hand, Currier [12] showed that a (non-strictly) horospherically convex, complete, immersed hypersurface in hyperbolic space is necessarily embedded and, if noncompact, a horosphere. Therefore one wonders whether a complete immersed hypersurface with nonnegative sectional curvature or even nonnegative Ricci curvature is necessarily embedded?
Naturally the embeddedness problem for a complete noncompact hypersurface in hyperbolic space is related to its asymptotic boundary at infinity. The asymptotic boundaries at infinity of complete hypersurfaces with nonnegative curvature in hyperbolic space have been studied in [1, 2, 16]. In [16], using hyperbolic Gauss maps and the geometry of horospheres, Epstein showed that a complete embedding of \(\mathbb {R}^2\) into \(\mathbb {H}^3\) with nonnegative Gaussian curvature has a single point asymptotic boundary at infinity. Epstein also showed [16] that a complete, strictly convex, immersed surface in \({\mathbb {H}}^{3}\) with a single point asymptotic boundary at infinity is necessarily embedded as the analog of van Heijenoort’s theorem [31] in hyperbolic 3-space. Epstein then asked if a complete immersed surface in \(\mathbb {H}^3\) with nonnegative Gaussian curvature is necessarily embedded [16].
Based on a theorem of Volkov and Vladimirova [32] and the splitting theorem of Cheeger and Gromoll [10], Alexander and Currier proved the following theorem in [1].
Theorem 1.1
(Theorem 1.1 of [1]) Let M be a nonnegatively curved, complete, noncompact, \(C^2\) hypersurface, of dimension \(n\ge 2\), properly embedded in hyperbolic space \(\mathbb {H}^{n+1}\). Suppose that M is not an equidistant hypersurface. Then M is diffeomorphic to \(\mathbb {R}^n\) and is the graph in Busemann coordinates of a height function with value in \((-\infty ,\infty )\) defined on an entire horosphere H. The restriction of the height function to any 2-plane in H is a subharmonic function of polynomial growth. In particular, the boundary at infinity \(\partial _{\infty }M\) consists of a single point.
Alexander and Currier then in [2] gave the precise statement of the conjecture as: Except for covering maps of equidistant surfaces in \({\mathbb {H}}^{3}\), every nonnegatively curved immersed hypersurface in \({\mathbb {H}}^{n+1}\) is properly embedded. They also mentioned a sketch of a proof of this conjecture for higher dimensions (\(n\ge 3\)) suggested by Gromov. Their conjecture remains completely open in the case when \(n=2\).
In this paper we present proofs of the conjecture of Alexander and Currier for the case when \(n=2\) as well as all higher dimensions (\(n\ge 3\)). Our main theorem is as follows:
Main Theorem
Except for covering maps of equidistant surfaces in \({\mathbb {H}}^{3}\), a complete, nonnegatively curved, immersed hypersurface in hyperbolic space \({\mathbb {H}}^{n+1}\) for \(n\ge 2\) is properly embedded.
Our approach for solving the conjecture of Alexander and Currier in higher dimensions (\(n\ge 3\)) is based on the recent work [4] on horospherically concave hypersurfaces in hyperbolic space (cf. Definition 2.2), which may be considered as an extension of the embedding theorem in [16]. Please see Theorems 2.2 and 2.3 in Sect. 2. This approach was initiated by Epstein in [16]. One key issue is to derive the injectivity of the hyperbolic Gauss map. We will rely on the injectivity theorem of Schoen and Yau [25, 26], while Epstein [16] used the embeddedness. The other key issue is the size estimate for the asymptotic boundary at infinity. We will rely on the Hausdoff dimension estimate of Zhu [34], while Epstein’s approach in [16] is based on similar results of Huber [21] for subharmonic functions.
To prove the conjecture of Alexander and Currier in dimension \(n=2\), we first establish a new proof of the classical result of Volkov and Vladimirova [32], which states that the only way to isometrically immerse the Euclidean plane \({\mathbb {R}}^{2}\) in \({\mathbb {H}}^{3}\) is as a covering map of an equidistant surface about a geodesic line or as a horosphere. Our proof of the main theorem is then based on the sharp growth estimate (4.5) in Lemma 4.2 for solutions to Gaussian curvature equations based on [21, 29, 30]. The key lower bound estimate for solutions to Gaussian curvature equations, which is needed to use [29, 30], is based on the non-collapsing result of Croke and Karcher [13] and a Harnack-type estimate from Li and Schoen [22]. Our approach in spirit is to show that a complete, noncompact, nonnegatively curved, nonflat, immersed surface in \({\mathbb {H}}^{3}\) lies inside a horosphere, hence has an asymptotic boundary at infinity of exactly one point. Then the embeddedness follows from Epstein [16].
This paper is organized as follows: in Sect. 2 we introduce the geometry of horospherical metrics for horospherically concave hypersurfaces in hyperbolic space and some framework from [3, 4, 18]. In Sect. 3 we apply the embedding Theorems 2.2 and 2.3 (see also [4]) to prove the conjecture of Alexander and Currier [2] in higher dimensions (\(n\ge 3\)). In Sect. 4 we present the proof of the conjecture of Alexander and Currier [2] in the case when \(n=2\).
2 Hyperbolic Gauss maps and horospherical metrics
In this section we recall the definitions of hyperbolic Gauss maps and horospherical concavity to set our terminologies and notations. Readers are referred to the papers [3, 4, 15, 17, 18] for more details.
For \(n\ge 2\), we denote Minkowski spacetime by \({\mathbb {R}}^{1,n+1}\), which is the vector space \({\mathbb {R}}^{n+2}\) endowed with the Minkowski spacetime metric \(\langle , \rangle \) given by
where \(\bar{x}\equiv (x_{0},x_{1},\ldots ,x_{n+1})\in {\mathbb {R}}^{n+2}\). Then hyperbolic space, de Sitter space, and the positive null cone are given by the respective hyperquadrics
We identify the ideal boundary at infinity \(\partial _{\infty }{\mathbb {H}}^{n+1}\) of hyperbolic space with the unit round sphere \({\mathbb {S}}^{n}\) sitting at \(\Pi _0=\{\bar{x}\in \mathbb {R}^{1,n+1}: x_{0}=1\}\).
Definition 2.1
(cf. [6, 15, 17]) Let \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) denote an immersed oriented hypersurface in \({\mathbb {H}}^{n+1}\) with unit normal \(\eta :M^{n}\rightarrow {\mathbb {S}}^{1,n}\). The hyperbolic Gauss map
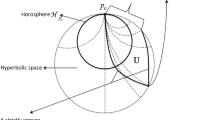
of \(\phi \) is defined as follows: for \(p\in M^{n}\), the image \(G(p)\in {\mathbb {S}}^{n}\) is the point at infinity of the unique horosphere in \({\mathbb {H}}^{n+1}\) passing through \(\phi (p)\) and whose outward unit normal at \(\phi (p)\) agrees with \(\eta (p)\).
Given an oriented, immersed hypersurface \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) with unit normal vector field \(\eta :M^{n}\rightarrow {\mathbb {S}}^{1,n}\), the light cone map \(\psi \) associated to \(\phi \) is defined by
As the ideal boundary \({\mathbb {S}}^{n}\) of \({\mathbb {H}}^{n+1}\) is identified with the unit round sphere at \(\Pi _{0}\), we have
where \(\psi _{0}=e^{\rho }\) is the so-called horospherical support function of the hypersurface \(\phi \) [18]. Note that, in our convention given in Definition 2.1, horospheres with outward orientation are the unique surfaces such that both the hyperbolic Gauss map and the associated light cone map are constant. Moreover, if \(x\in {\mathbb {S}}^{n}\) is the point at infinity of such a horosphere, then \(\psi =e^{\rho }(1,x)\) where \(\rho \) is the signed hyperbolic distance of the horosphere to the point \(\mathcal {O}=(1,0,\dots ,0)\in {\mathbb {H}}^{n+1}\subseteq {\mathbb {R}}^{1,n+1}\).
Considering the fact that horospheres are intrinsically flat, one can then use horospheres to define concavity/convexity for hypersurfaces in hyperbolic space.
Definition 2.2
(cf. [4, 18, 24]) Let \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) be an immersed oriented hypersurface and let \(\mathcal {H}_{p}\) denote the horosphere in \({\mathbb {H}}^{n+1}\) that is tangent to \(\phi (M)\) at \(\phi (p)\) whose outward unit normal at \(\phi (p)\) agrees with \(\eta (p)\). We will say that \(\phi \) is horospherically concave at p if there exists a neighborhood \(V\subset M^{n}\) of p so that \(\phi (V\backslash \{p\})\) stays outside of \(\mathcal {H}_{p}\). Moreover, the distance function of the hypersurface to the horosphere does not vanish up to the second order at p in any direction.
Due to [18], we have the following characterization of horospherically concave hypersurfaces.
Lemma 2.1
([18]) Let \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) be an immersed oriented hypersurface. Then \(\phi \) is horospherically concave at p if and only if the principal curvatures \(\kappa _{1},\ldots ,\kappa _{n}\) of \(\phi \) at p are simultaneously \(>-1\). In particular, \(\phi \) is horospherically concave at p implies that dG is invertible at p and therefore the hyperbolic Gauss map of \(\phi \) is a local diffeomorphism.
In light of Lemma 2.1 we give another definition for our later needs.
Definition 2.3
Let \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) be an immersed oriented hypersurface. It is called uniformly horospherically concave if the principal curvatures \(k_i(x)\ge -1+\delta ,i={1,\ldots ,n}\) for any \(x\in M^n\) and some \(\delta >0\).
To realize the second statement of Lemma 2.1, let \(\{e_{1},\ldots ,e_{n}\}\) denote an orthonormal basis of principal directions of \(\phi \) at p and let \(\kappa _{1},\ldots ,\kappa _{n}\) denote the associated principal curvatures. Then \(d\phi (e_{i})=e_{i}\) and \(d\eta (e_{i})=-\kappa _{i}e_{i}\) for \(i=1,\ldots ,n\), so as in [18], it follows that
where \(g_{{\mathbb {S}}^{n}}\) denotes the round metric on \({\mathbb {S}}^{n}\). Now given an immersed oriented horospherically concave hypersurface \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\), one can use the hyperbolic Gauss map (or light cone map) to induce a canonical locally conformally flat metric on \(M^{n}\) as follows:
Definition 2.4
([16,17,18]) Let \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) be an immersed oriented horospherically concave hypersurface. Then the hyperbolic Gauss map \(G:M^{n}\rightarrow {\mathbb {S}}^{n}\) is a local diffeomorphism. We consider the locally conformally flat metric
on \(M^{n}\) and call it the horospherical metric associated to the immersed oriented horospherically concave hypersurface \(\phi \).
For a horospherically concave hypersurface \(\phi \), its associated light cone map \(\Psi \) is spacelike and parameterizes a codimension 2 submanifold in \({\mathbb {R}}^{1,n+1}\). \(\phi \) and \(\eta \) provide two unit normal fields to \(\Psi \) and the second fundamental form is given by
where \(\{e_{1},\dots ,e_{n}\}\) is an orthonormal basis of principal directions with respect to \(\phi \). Hence, due to the Gauss equations in \({\mathbb {R}}^{1,n+1}\), the sectional curvatures of the horospherical metric \(g_{h}\) on \(M^{n}\) are given by
When \(n\ge 3\), the Schouten tensor then is given by
When \(n=2\), instead, one considers the symmetric 2-tensor
whose eigenvalues are
whose trace is the Gaussian curvature
and whose divergence is \(2dK_{g_{h}}\). Hence we get the Gaussian curvature equation
When the hyperbolic Gauss map \(G:M^{n}\rightarrow {\mathbb {S}}^{n}\) of a horospherically concave hypersurface \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) is injective, one may push down the horospherical metric \(g_{h}\) onto the image
to obtain the conformal metric
where \(\hat{\rho }=\rho \circ G^{-1}:\Omega \rightarrow \mathbb {R}\). When there is no confusion, we will also refer to this conformal metric \(\hat{g}_{h}\) as the horospherical metric. The correspondence between horospherically concave hypersurfaces \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) in hyperbolic space and the conformal metric \(\hat{g}_{h}\) on the image \(\Omega \) of the Gauss map G have been promoted in [3,4,5, 16, 18]. The following result follows from the so-called global correspondence from [4, 5, 18] and will be useful to our work here.
Theorem 2.1
(cf. [4, 5, 18]) For \(n\ge 2\), let \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) be a complete uniformly horospherically concave (see Definition 2.3) hypersurface with injective hyperbolic Gauss map \(G:M^{n}\rightarrow {\mathbb {S}}^{n}\). Then
-
\(\phi \) induces a complete conformal metric \(\hat{g}_{h}=e^{2\hat{\rho }}g_{{\mathbb {S}}^{n}}\) on the image \(\Omega =G(M)\subset {\mathbb {S}}^{n}\) with bounded curvature.
-
More importantly, the asymptotic boundary \(\partial _{\infty }\phi (M)\subset {\mathbb {S}}^{n}\) at infinity of the hypersurface \(\phi \) in \({\mathbb {H}}^{n+1}\) coincides with the boundary \(\partial \Omega \subset {\mathbb {S}}^{n}\) of the Gauss map image.
-
One may use the image \(\Omega \) of Gauss map as the parameter space to reparametrize \(\phi \) so that the Gauss map
$$\begin{aligned} G(x)=x:\Omega \rightarrow {\mathbb {S}}^{n} \end{aligned}$$and
$$\begin{aligned} \phi _{t}=\frac{e^{\rho +t}}{2}(1+e^{-2(\rho +t)}(1+|\nabla \rho |^{2}))(1,x)+e^{-(\rho +t)}(0,-x+\nabla \rho ) \end{aligned}$$(2.13)is the normal flow of the hypersurface \(\phi (M)\).
The contribution of [3] is the use of the normal flow of a horospherically concave hypersurface with injective hyperbolic Gauss map to possibly unfold the hypersurface into an embedded one. This is because the leaves of regular part of the normal flow are the same as the level surfaces of the geodesic defining function of the horospherical metric \(\hat{g}_{h}\) (cf. [3, 4]). For instance, it is observed in [3] that any horospherical ovaloid can be deformed along its normal flow into an embedded one. Consequently this leads to new proofs of Obata type theorems for horospherical ovaloids. In [4, 5], based on the global correspondence theorem, we established an extension of the embedding theorem of Epstein [16] as follows:
Theorem 2.2
(cf. [4, 5]) For \(n\ge 2\), let \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) be a complete uniformly horospherically concave hypersurface with injective hyperbolic Gauss map \(G:M^{n}\rightarrow {\mathbb {S}}^{n}\). Suppose that the asymptotic boundary \(\partial _{\infty }\phi (M)\) at infinity of the hypersurface is a disjoint union of smooth closed embedded submanifolds in \({\mathbb {S}}^{n}\). Then, along the normal flow from the hypersurface, the leaves eventually become embedded.
An argument similar to those in [16, 31] results in the following slight extension of the embedding theorem of Epstein [16].
Theorem 2.3
For \(n\ge 2\), let \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) be a complete, locally strictly convex, immersed hypersurface. Suppose that the asymptotic boundary \(\partial _{\infty }\phi (M)\) at infinity of the hypersurface is a single point in \({\mathbb {S}}^{n}\). Then the hypersurface is in fact embedded.
Proof
For convenience of readers, we would like to present a proof based on the arguments in [16, 31], which are similar to those in [4]. Since the asymptotic boundary at infinity of the hypersurface is a single point in \({\mathbb {S}}^{n}\), one may find a family of round \((n-1)\)-spheres in \({\mathbb {S}}^{n}\) to foliate the sphere \({\mathbb {S}}^{n}\) with the point and its antipodal point deleted. Then the family of hyperplanes whose asymptotic boundary at infinity are the family of round \((n-1)\)-spheres foliates hyperbolic space. To finish the argument one simply needs to observe that, close to the first touch point of the hyperplanes and the hypersurfaces from the antipodal point, the hypersurface is locally embedded and the intersections of the hyperplanes and hypersurfaces are embedded convex topological spheres. Moreover, everything remains the same up to the end. The connectedness and convexity of the hypersurface force each intersection to be connected and convex. The embeddedness of the intersections is due to [14]. \(\square \)
3 Embeddedness in higher dimensions
In this section we consider noncompact hypersurfaces immersed in hyperbolic space with nonnegative sectional curvature and present a proof for the conjecture of Alexander and Currier [2] in higher dimensions (\(n\ge 3\)). Based on the injectivity of development maps of Schoen and Yau [25, 26] and the Hausforff dimension estimates of Zhu [34], the proof of the conjecture of Alexander and Currier [2] is rather straightforward following our work in [4] and the brief summary in the previous section.
First of all, from the curvature relations (2.5), we have:
Lemma 3.1
Suppose that \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) is a nonnegatively curved immersed hypersurface. Then \(\phi \) is horospherically concave and the horospherical metric is also nonnegatively curved.
Proof
It is easily seen that a nonnegatively curved hypersurface in hyperbolic space is horospherically concave, in fact, it is strictly convex. Then the lemma is a simple consequence of (2.5). \(\square \)
There does not seem to be any analog of Lemma 3.1 available if we consider nonnegative Ricci curvature for the hypersurface \(\phi \) instead. In higher dimensions (\(n\ge 3\)), using the works in [25, 26, 34], we obtain the following:
Lemma 3.2
For \(n\ge 3\), let \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) be a complete, nonnegatively curved, immersed hypersurface. Then the hyperbolic Gauss map is a development map from \((M^{n},\ g_{h})\) and injective. Moreover, the Hausdorff dimension of \(\partial G(M)={\mathbb {S}}^{n}\backslash G(M)\) is zero.
Proof
Due to the uniform horospherical concavity (strict convexity) of the hypersurface \(\phi \), the completeness of the hypersurface implies the completeness of the horospherical metric \(g_{h}\). In the light of Lemma 3.1, \((M^{n},\ g_{h})\) is a complete, nonnegatively curved Riemannian manifold. Therefore the lemma follows from the injectivity theorem of Schoen and Yau in [25, 26] and the Hausdorff dimension estimates of Zhu in [34]. We also refer to [7] for comments on Schoen and Yau’s theorem. Since \(g_h\) has nonnegative Ricci curvature, we can get the conclusion. \(\square \)
One more ingredient for our proof of the conjecture of Alexander and Currier [2] in higher dimensions (\(n\ge 3\)) is the following:
Lemma 3.3
Suppose that \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) is a nonnegatively curved immersed hypersurface. Then along the normal flow (2.13) the hypersurface remains nonnegatively curved.
Proof
For the normal flow (2.13) in hyperbolic space, one knows exactly how the principal curvatures evolve:
One may then calculate the sectional curvatures \(K_{ij}^{t}=\kappa _{i}^{t}\kappa _{j}^{t}-1\) for \(t>0\) to find
where \(K_{ij}\) are the sectional curvatures of \(\phi \). \(\square \)
We are now ready to prove the conjecture of Alexander and Currier [2] in higher dimensions (\(n\ge 3\)).
Proof of the main theorem in higher dimensions
For \(n\ge 3\), let \(\phi :M^{n}\rightarrow {\mathbb {H}}^{n+1}\) be an immersed, complete, noncompact hypersurface with nonnegative sectional curvature. In the light of Lemma 3.2 the hyperbolic Gauss map \(G:M^{n}\rightarrow {\mathbb {S}}^{n}\) is injective and the Hausdorff dimension of \(\partial G(M)\subset {\mathbb {S}}^{n}\) is zero. According to Theorem 2.1 (cf. [4]), we have
Now, if \(\partial _{\infty }\phi (M)=\partial G(M)\) were empty, then \(\phi (M)\) would be compact. Moreover, since any set of Hausdorff dimension zero is totally disconnected, due to the splitting theorem of Cheeger and Gromoll [10], the asymptotic boundary \(\partial _{\infty }\phi (M)=\partial G(M)\) consists of either one single point or exactly two points.
When \(\partial _{\infty }\phi (M)\) is a single point, the result follows from Theorem 2.3. Assume \(\partial _{\infty }\phi (M)\) consists of exactly two points. We then first apply Theorem 2.2 (please also see [4]) and observe that along the normal flow the nonnegatively curved hypersurface \(\phi _{t}\) is embedded for sufficiently large t. Notice that the nonnegativity of the sectional curvatures of \(\phi _{t}\) follows from Lemma 3.3. Therefore, from Theorem 1.1 of Alexander and Currier, for t sufficiently large the hypersurface \(\phi _{t}\) has to be an equidistant hypersurface about a geodesic line in hyperbolic space. This forces the hypersurface \(\phi \) to be an equidistant hypersurface in hyperbolic space. Thus the proof of the conjecture of Alexander and Currier [2] in higher dimensions (\(n\ge 3\)) is complete.
4 Embeddedness of nonnegatively curved surfaces
In this final section we consider noncompact, complete surfaces immersed in \({\mathbb {H}}^{3}\) with nonnegative Gaussian curvature and present a proof of the conjecture of Alexander and Currier [2] in dimension 2.
Suppose that \(\phi :M^{2}\rightarrow {\mathbb {H}}^{3}\) is a complete, nonnegatively curved, immersed surface. We may assume the surface is locally strictly convex after a change of orientation, if necessary. Therefore the hyperbolic Gauss map \(G:M^{2}\rightarrow {\mathbb {S}}^{2}\) is a local diffeomorphism, and the horospherical metric \(g_{h}\) is complete (cf. Theorem 2.1) and nonnegatively curved in the light of (2.9). In fact, the symmetric tensor P associated with the horospherical metric \(g_{h}\) satisfies
according to (2.8). With the complex structure given by the horospherical metric \(g_{h}\) the Gauss map G is a conformal map into the Riemann sphere. Lemma 3.2 breaks down in dimension 2 because of the abundance of local holomorphic functions (the lack of Liouville Theorem). The search for a type of Picard theorem for holomorphic functions analogous to Lemma 3.2 in dimension 2 is technically much more difficult, though it seems to be a classic topic. We are going to rely on the growth estimate (4.5) in Lemma 4.2 based on [21, 29, 30] for the support function \(\rho \) as a solution to the Gaussian curvature equation (2.10). The novelty of our approach is to recognize that nonflatness implies that the asymptotic boundary at infinity consists of exactly one point and embeddedness then follows directly from the embedding theorem of Epstein [16] as a hyperbolic analog of the embedding theorem of van Heijenoort [31].
Let \(\pi :\widetilde{M}^{2}\rightarrow M^{2}\) be the universal covering map. Then we consider the new parametrization \(\tilde{\phi }=\phi \circ \pi :\widetilde{M}^{2}\rightarrow {\mathbb {H}}^{3}\) with the hyperbolic Gauss map \(\tilde{G}=G\circ \pi :\widetilde{M}^{2}\rightarrow {\mathbb {S}}^{2}\) and the horospherical metric \(\tilde{g}_{h}=\pi ^{*}g_{h}\) whose Gaussian curvature \(K_{\tilde{g}_{h}}=K_{g_{h}}\circ \pi \ge 0\). Most importantly we have the symmetric tensor
where \(\tilde{\rho }=\rho \circ \pi \) and
It follows from Theorem 15 in [21] of Huber that \((M^{2},g_{h})\) is parabolic when the surface \(\phi \) is nonnegatively curved. Therefore the universal cover \(\widetilde{M}^{2}\) of \(M^{2}\) is biholomorphic to the complex plane \({\mathbb {C}}\).
4.1 Flat cases
In this subsection we present a proof to the following theorem of Volkov and Vladimirova [32]. Our proof paves a way for us to handle the nonflat cases in next subsection.
Theorem 4.1
([32]) Let \(\phi \) be an isometric immersion from Euclidean plane to hyperbolic 3-space. Then \(\phi \) is either a covering map of an equidistant surface about a geodesic line in \({\mathbb {H}}^{3}\) or it is an embedded horosphere.
Proof
First of all it follows from (2.9) that \(K_{g_{h}}\equiv 0\) whenever \(K_{\phi }\equiv 0\). Therefore \((\mathbb {R}^{2},\ g_{h})\) is isometric to the Euclidean plane. Let \(z=(x,y)\) be the Euclidean coordinate for \((\mathbb {R}^{2},\ g_{h})\) so that
From the properties of the tensor P, we know that P is a symmetric 2-tensor, which is trace-free, divergence-free and bounded in the sense that
In coordinate \(z=x+\sqrt{-1}y\), we have
One readily checks \(P_{11}-\sqrt{-1}P_{12}\) and \(P_{22}+\sqrt{-1}P_{21}\) are bounded and holomorphic functions on \({\mathbb {C}}\). From Liouville’s theorem, \(P_{ij}\) are constants, which implies that the principal curvatures of the surface are both constant (i.e. the surface is an isoparametric surface). Therefore it is a horosphere when \(P=0\) and an equidistance surface when \(P\ne 0\) according to the classification of isoparametric surfaces in hyperbolic 3-space (cf. for example, [8, 9, 32]). So the proof is complete. \(\square \)
We would like to point out that in the case when \(P=0\) (i.e. when the surface is a horosphere), one in fact can explicitly find that
for some positive constant C.
4.2 Nonflat cases
In this subsection we consider a complete, noncompact, nonnegatively curved, nonflat, immersed surface \(\phi :M^{2}\rightarrow {\mathbb {H}}^{3}\). We will focus on how to recognize and use the nonflatness. From Huber’s result [21], we know the universal cover \((\widetilde{M}^{2},\ \tilde{g}_{h})\) is globally conformal to the Euclidean plane. Let \(z=(x,y)\) be the Euclidean coordinate for \(\widetilde{M}^{2}\) so that
Rewrite the relation above as
for \(\rho _0 = \tilde{\rho }- \tilde{\rho }_0\) and consider the symmetric 2-tensor
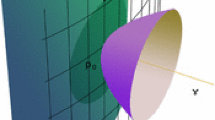
It is perhaps helpful to think that with the Gauss map \(\tilde{G}\) and support function \(e^{\rho _{0}}\), \(P_{0}\) corresponds to a “surface” in \({\mathbb {H}}^{3}\) as in Theorem 2.1. What is this “surface”? From the discussion in the flat cases in the previous subsection we know that it is a horosphere if \(P_{0}\) vanishes. The following is a simple calculation.
Lemma 4.1
In the (x, y) coordinates
where
is the Schouten tensor for the surface \(\tilde{\phi }\).
Proof
We let \(x=x_{1},y=x_{2}.\) As \(|dz|^{2}=e^{2\rho _{0}}\tilde{G}^{*}g_{\mathbb {S}^{2}}\), we have that
Therefore,
So,
And
Hence,
\(\square \)
The most important technical tool in this case is the following sharp growth estimates for solutions to Gaussian curvature equations based on [21, Theorem 10], [29, Lemma 3], and [30, Theorem 2.1]. We will present the proof in the next subsection.
Lemma 4.2
Suppose that \((\mathbb {R}^{2},e^{2u}|dz|^{2})\) is complete, noncompact, nonnegatively curved, and nonflat. If the Gaussian curvature is bounded, then
for some \(m\in (0,1]\).
We are now ready to prove that \(P_{0}\) vanishes.
Lemma 4.3
The Schouten tensor \(P_{0}\) in (4.4) vanishes identically on \({\mathbb {R}}^{2}\) and \(\rho _{0}\) is given as a solution in (4.3).
Proof
First of all we know that \(P_{0}\) is trace-free and divergence-free since \(e^{2\rho _0}\tilde{G}^*g_{\mathbb {S}^2}=|dz|^2\) is flat. To show \(P_{0}\) is in fact identically zero one just needs to show \(|P_{0}|\in L^{p}(\mathbb {R}^{2})\) for some \(p>1\), in the light of, for instance, [33, Theorem 3]. As the Gaussian curvature of \(\tilde{g}_{h}\) is bounded, by applying Lemma 4.2, we get
for some \(m\in (0,1]\). Then from (4.2) we know that
and hence \(|\tilde{P}|\) belongs to \(L^{p}(\mathbb {R}^{2})\) for some large \(p>1.\) Since
from the Schauder and \(L^p\) estimates of [19], we have
From (4.6) and the first inequality of (4.8) as \(R\rightarrow \infty \), we have \(\partial ^{2}\tilde{\rho }_{0}\in L^{p}(\mathbb {R}^{2})\) for any p sufficiently large since \(K_{\tilde{g}_h}\) is bounded. Meanwhile, from the second inequality of (4.8) and \(m\in (0, 1]\) for
at least when \(|z| > 2\sqrt{2}\), we get
which implies that \(|\partial \tilde{\rho }_{0}(z)|^{2}\in L^{p}(\mathbb {R}^{2})\) for p sufficiently large. Therefore, due to Lemma 4.1, it follows that \(|P_0| \in L^p(\mathbb {R}^2)\).
With \(P_0=0\), we now know that the support function \(\rho _0\) and the Gauss map \(\tilde{G}\) indeed induce a real “surface”, which in fact is a horosphere. Thus the proof is complete. \(\square \)
We are now ready to complete the proof of the conjecture of Alexander and Currier [2] in dimension 2.
Proof of the main theorem in nonflat cases in dimension 2
From Lemma 4.3 we know \(\tilde{G}\) is an injective map which misses only one point \(q\in \mathbb {S}^{2}.\) So the covering map \(\pi \) is a diffeomorphism. From (4.3) and (4.5) we have
as \(z\rightarrow +\infty \). So \(\tilde{\rho }(\tilde{G}^{-1}(\xi ))\rightarrow +\infty \) as \(\xi \rightarrow q\), which, together with the proof of Lemma 3.2 of [4], implies that \(\partial _{\infty }\phi (M)=\{q\}\). We remark that one may derive the same conclusion from [5]. From the embedding theorem of Epstein in [16], we know \(\phi \) is embedding. \(\square \)
4.3 Proof of Lemma 4.2
In this subsection we prove Lemma 4.2. We start with [30, Theorem 2.1] as follows:
Theorem 4.2
([30, Theorem 2.1]) Let v(x, y) be a \(C^{2}\) positive solution of
in a punctured neighborhood of the origin in \(\mathbb {R}^{2}\) for a constant C. Then either v has \(C^{1}\) extension to the origin or
for some finite positive number \(m_1.\)
Remark 4.1
By considering \(v(x,y)-\inf v(x,y)\), one can easily extend the above theorem to the case that v(x, y) is just bounded from below.
To apply Theorem 4.2 we first take an inversion. Let \(\tilde{z}=\frac{z}{|z|^{2}}\) be the inversion map. Then
where
We then have
It is clear that, in order to apply Theorem 4.2, we need to obtain a lower bound first for the conformal factor v. To this purpose we first observe that \(e^{-v}\) is a subharmonic function on \((\mathbb {R}^2, e^{2v}|d\tilde{z}|^2)\), that is,
To obtain the lower bound, we recall [22, Theorem 1.2]. To state their theorem we consider a Riemannian manifold M, \(x_0\in M\), and a radius r such that, if M has no boundary, r is less than half of the diameter of M; if \(\partial M\ne \emptyset \), \(r < \frac{1}{5} \text {dist}(x_0, \partial M)\).
Theorem 4.3
([22, Theorem 1.2]) Suppose that \(M^n\) is a Riemannian manifold with \(Ric \ge - (n-1)k\). Let \(x_0\in M\) and r given as above. Then for a nonnegative subharmonic function v we have, for a constant C depending only on the dimension and any \(\tau \in (0, \frac{1}{2})\),
We therefore have, for the conformal factor v in (4.10),
Fortunately, we have a non-collapsing result in dimension 2 from [13, Theorem A] as follows:
Theorem 4.4
([13, Theorem A]) If \((M^2, \ g)\) is complete and nonnegatively curved, then there exists a constant C(M) such that, for \(r\le 1\),
Thus, the fact that the conformal factor v is bounded from below follows from (4.12), (4.13), and the fact that \(\text {vol}_{|d\tilde{z}|^2}(B_r(x_0))\) is bounded. In fact, in this way we may conclude that \(v(x_0) \rightarrow \infty \) as \(\tilde{z}(x_0)\rightarrow 0\).
Now we are ready to finish the proof of Lemma 4.2.
Proof of Lemma 4.2
According to Theorem 4.2, we get
for some constant \(m_1 > 0\). Next we claim that \(m_{1}\ge 1\) since the metric \(g = e^{2v}|d\tilde{z}|^2\) is complete and noncompact at the origin.
Assume otherwise \(m_1 <1\). Then let \(m_2 \in (m_{1}, 1)\) and \(r_{s}\) be sufficiently small so that
which implies
and
This contradicts the assumption that the metric \(g = e^{2v}|d\tilde{z}|^2\) is complete and noncompact at the origin.
Therefore, from (4.9), we have
where \(m=2-m_{1}\le 1\).
To see \(m>0\) when g is nonnegatively curved and nonflat, we recall
Taking an approach similar to that in the proof of [29, Lemma 3], for \(0<r_{2}<r_{1}\), we have that
where
Then
and therefore
Plugging this back into (4.14), we have that
Now, from \(u=m\log \frac{1}{|z|}+o(\log |z|)\) as \(|z|\rightarrow \infty \), it follows that
as \(K_{g}\ge 0\) and is not identically 0. \(\square \)
References
Alexander, S., Currier, R.J.: Nonnegatively curved hypersurfaces of hyperbolic space and subharmonic functions. J. Lond. Math. Soc. 41(2), 347–360 (1990)
Alexander, S., Currier, R.J.: Hypersurfaces and nonnegative curvature. Proc. Symp. Pure Math. 54(3), 37–44 (1993)
Bonini, V., Espinar, J.M., Qing, J.: Correspondences of hypersurfaces in hyperbolic Poincaré manifolds and conformally invariant PDEs. Proc. Am. Math. Soc. 138(11), 4109–4117 (2010)
Bonini, V., Espinar, J.M., Qing, J.: Hypersurfaces in hyperbolic space with support function. Adv. Math. 280, 506–548 (2015)
Bonini, V., Qing, J., Zhu, J.: Weekly horospherically convex surfaces in hyperbolic 3-space. Ann. Glob. Anal. Geom. (to appear)
Bryant, R.L.: Surfaces of mean curvature one in hyperbolic space. Astérisque 154–155, 321–347 (1987)
Carron, G., Herzlich, M.: Conformally flat manifolds with nonnegative Ricci curvature. Compos. Math. 142(3), 798–810 (2006)
Cartan, E.: Familles de surfaces isoparamétriques dans les espaces à courbure constante. Ann. Mat. Pura Appl. (4) 17, 177–191 (1938)
Cecil, T.: Lie Sphere Geometry, with Application to submanifolds, 2nd edn. Universitext Springer, New York (2008)
Cheeger, J., Gromoll, D.: The splitting theorem for manifolds of nonnegative Ricci curvature. J. Differ. Geom. 6, 119–128 (1971)
Chern, S.S., Lashof, R.K.: On the total curvature of immersed manifolds. Mich. Math. J. 5, 5–12 (1958)
Currier, R.J.: On surfaces of hyperbolic space infinitesimally supported by horospheres. Trans. Am. Math. Soc. 313(1), 419–431 (1989)
Croke, C.B., Karcher, H.: Volume of small balls on open manifolds: lower bounds and examples. Trans. Am. Math. Soc. 309(2), 753–762 (1988)
Do Carmo, M.P., Warner, F.W.: Rigidity and convexity of hypersurfaces in spheres. J. Differ. Geom. 4, 134–144 (1970)
Epstein, C.L.: The hyperbolic Gauss map and quasiconformal reflections. J. Reine Angew. Math. 372, 96–135 (1986)
Epstein, C.L.: The asymptotic boundary of a surface imbedded in \({\mathbb{H}}^{3}\) with nonnegative curvature. Mich. Math. J. 34, 227–239 (1987)
Epstein, C.L.: Envelopes of horospheres and Weingarten surfaces in hyperbolic 3-space. Unpublished (1986). http://www.math.upenn.edu/~cle/papers/index.html
Espinar, J.M., Gálvez, J.A., Mira, P.: Hypersurfaces in \({\mathbb{H}}^{n+1}\) and conformally invariant equations: the generalized Christoffel and Nirenberg problems. J. Eur. Math. Soc. 11(4), 903–939 (2009)
Gilbarg, D., Trudinger, N.S.: Elliptic Partial Differential Equations of Second Order. Springer, Berlin (1977)
Hadamard, J.: Sur certaines proprétës des trajactoires en dynamique. J. Math. 3, 331–387 (1897)
Huber, A.: On subharmonic functions and differential geometry in the large. Comment. Math. Helv. 32, 13–72 (1957)
Li, P., Schoen, R.: \(L^{p}\) and mean value properties of subharmonic functions on Riemannian manifolds. Acta Math. 153(3–4), 279–301 (1984)
Sacksteder, R.: On hypersurfaces with no negative sectional curvature. Am. J. Math. 82, 609–630 (1960)
Schlenker, J.M.: Hypersurfaces in \({\mathbb{H}}^{n}\) and the space of its horospheres. Geom. Funct. Anal. 12, 395–435 (2002)
Schoen, R., Yau, S.T.: Conformally flat manifolds, Kleinian groups and scalar curvature. Invent. Math. 92, 47–71 (1988)
Schoen, R., Yau, S.T.: Lectures on Differential Geometry. In: Conference Proceedings and Lecture Notes in Geometry and Topology, vol. 1. International Press (1994)
Spivak, M.: A comprehensive introduction to differential geometry, vol. IV. Publish or Perish, Houston (1999)
Stoker, J.J.: Über die Gestalt der positiv gekrümmten offenen Flächen im dreidimensionalen Raume. Compos. Math. 3, 55–89 (1936)
Taliaferro, S.: On the growth of superharmonic functions near an isolated singularity I. J. Differ. Equ. 158, 28–47 (1999)
Taliaferro, S.: Isolated singularities of nonlinear elliptic inequalities. II. Asymptotic behavior of solutions. Indiana Univ. Math. J. 55(6), 1791–1811 (2006)
van Heijenoort, J.: On locally convex manifolds. Commun. Pure Appl. Math. 5, 223–242 (1952)
Volkov, Y.A., Vladimirova, S.M.: Isometric immersions in the Euclidean plane in Lobachevskii space. Math. Zametki 10, 327–332 (1971)
Yau, S.T.: Some function-theoretic properties of complete Riemannian manfolds and their applications to geometry. Indiana Univ. Math. J. 25, 659–670 (1976)
Zhu, S.: The classification of complete locally conformally flat manifolds of nonnegative Ricci curvature. Pac. J. Math. 163(1), 189–199 (1994)
Acknowledgements
The authors would like to express their gratitude to Professor Jose Espinar at IMPA for his interest in this work. We are very appreciative of his careful reading that led to the current version.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by F. C. Marques.
Shiguang Ma is support by NSFC Grant no.11301284 and NSFC Grant no.11571185. Jie Qing is partially supported by NSF DMS-1303543.
Rights and permissions
About this article

Cite this article
Bonini, V., Ma, S. & Qing, J. On nonnegatively curved hypersurfaces in \(\mathbb {H}^{n+1}\). Math. Ann. 372, 1103–1120 (2018). https://doi.org/10.1007/s00208-018-1694-8
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00208-018-1694-8