
Abstract
A systematic study of the effect of energy dissipation on critical nonconservative loads within the stability calculation is carried out. Some classical nonconservative elastic stability problems are considered: the stability of a linear form of equilibrium of a double pendulum under the action of a follower force, the stability of a cantilever beam compressed by a follower force (Beck’s problem), and the stability of a flat panel in a supersonic gas flow. The dependences of critical loads on the damping parameters are built, and the conditions of mechanical system stabilization and destabilization are determined for the cases when damping coefficients vary over a wide range and for various ratios. The external and internal frictions (according to the Voigt model) are considered for the distributed parameter systems. Conclusions about the effect of various types of energy dissipation on the critical values of nonconservative load parameters and about the conditions of nonconservative system destabilization due to the energy dissipation are formulated.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
INTRODUCTION
E.L. Nikolai was the first to find in his studies of stability [1] that, at critical values of some loads, mechanical systems had no adjacent equilibrium positions, so that their initially stable starting equilibrium position changed to an oscillatory motion. This occurs under the action of nonconservative loads and requires applying the dynamic study of stability [2]. Hydro- and aerodynamic forces, reactive forces, forces acting on turbine rotors and electrical machines, etc., are not conservative, so when they reach critical values, they can be a source of energy inflow under oscillatory motions of the system. This corresponds to a flutter-type loss by the system of stability of the starting equilibrium position through oscillations. A special class of problems, namely, nonconservative problems of elastic stability theory, was set in the mechanical system of stability theory, in addition to the Euler approach to the stability investigation of construction elements. At present, a lot of nonconservative stability problems [2–8] have been solved, and the stability of many types of mechanical systems subjected to complicated loading with various forces, including nonconservative, has been studied. Many features of nonconservative systems are not typical for systems loaded with potential forces. These are the possibility of stability loss of the divergence type or flutter type; the nonconvexity of the stability area, if it is built in the load parameter space; and the significant interaction of different forms of oscillations.
The specific feature that is most interesting and hard to explain of nonconservative problems of the elastic stability theory is the destabilizing influence of damping on the critical load values [7–16]. Indeed, the increase in the energy dissipation in dynamic systems under vibrational, shock, parametric, and similar loads renders a positive influence on the indicators of mechanical reliability. In the problems of construction and machine component stability under the action of nonconservative positional forces, the account of damping, which is rather small in some cases, can reduce considerably the critical load parameters. This feature, termed the Ziegler paradox, was first formulated in [7].
Since the Ziegler paradox was discovered, many papers have been published, in which the authors tried to explain the destabilizing influence of dissipative forces on the critical values of some nonconservative loads [8–16]. These explanations are quite diverse concerning both the level of their conclusive force and the level of understanding. Most often, studies of this kind are reduced to demonstrating the dependences of critical load values on the values of energy dissipation in nonconservative systems of different origin thereby confirming the Ziegler paradox.
This paper presents a systematic investigation of the influence of damping on the critical values of load parameters for some traditional nonconservative problems of the elastic stability theory, in particular, a double pendulum under the action of a follower load, Beck’s problem (a cantilever bar with distributed parameters under the action of a follower force), and the flutter of a flat plate in a supersonic gas flow.
DOUBLE PENDULUM
First of all, we examine the Ziegler pendulum, i.e., a double pendulum carrying the lumped masses \({{m}_{1}}\) and \({{m}_{2}}\), which moves within one plane. The pendulum is under the action of the follower force \(P\). We investigate the stability of the linear form of equilibrium, when elastic joints with the stiffness coefficients \({{c}_{1}}\) and \({{c}_{2}}\) are not loaded. In addition, the joint rotations are accompanied by energy dissipation with the coefficients \({{b}_{1}}\) and \({{b}_{2}}\). We accept the angles of deviation \({{\varphi }_{1}}\) and \({{\varphi }_{2}}\) of the inertia-free bars from the linear form as the generalized coordinates. We can write the linearized equations of perturbed motion of the system relative to the angular displacement vector \(\boldsymbol{\varphi} = {{\left[ {{{\varphi }_{1}},{{\varphi }_{2}}} \right]}^{{\text{T}}}}\) in the following form
where the following denotations are accepted:
In Eq. (1), it is assumed that \({{m}_{1}} = 2{{m}_{2}} \equiv 2m\), \({{c}_{1}} = {{c}_{2}} \equiv c\), \({{l}_{1}} = {{l}_{2}} \equiv l\) and the following dimensionless parameters are introduced:
In view of our goal to study the dependence of the critical value of the follower force parameter \({{\beta }_{*}}\) on the energy dissipation parameters, we present vector \(\boldsymbol{\varphi}\) in the form \(\boldsymbol{\varphi}(\tau ) = \boldsymbol{\Phi}{{{\text{e}}}^{{\lambda \tau }}}\), where \(\lambda \) is the characteristic parameter determining the behavior of the system after initial perturbations. According to Lyapunov’s theory, the system is stable if \(\forall \operatorname{Re} \lambda \leqslant 0\). The pattern of the loss of stability is determined by the intersection of characteristic indicators with the imaginary axis when they enter the right half-plane. In the problems considered, when the load attains a critical value, the characteristic indicators with nonzero imaginary parts pass to the right half-plane. Hence, the loss of stability is of the oscillatory, flutter type. In view of (1) for indicators \(\lambda \), we obtain the following equation
The critical value \({{\beta }_{*}}\) from Eq. (2) can be obtained either by solving the equation directly or by finding the least root of the principal minor of the Hurwitz matrix. Some results of the study of the dependence of the critical value of the follower force parameter on the damping parameters are presented in Fig. 1.

Dependence of the critical force on damping coefficients: (a) \({{\beta }_{*}}({{\gamma }_{1}})\) in the first joint; (b) \({{\beta }_{*}}({{\gamma }_{2}})\) in the second joint.
The quasi-critical value of the follower force \(\beta \) calculated without taking damping into account, with zero matrix \({\mathbf{B}}\), is \({{\beta }_{{{\text{**}}}}} = 2.09\). When friction is vanishingly small but identical at each joint, i.e.,\({{\gamma }_{1}} = {{\gamma }_{2}} \to 0\), the critical value decreases to \({{\beta }_{*}} = 1.47\). This is essentially the Ziegler paradox. When damping grows, but the condition \({{\gamma }_{1}} = {{\gamma }_{2}}\) holds, no destabilizing influence of friction on the system stability is observed [8], and the dependence curve \({{\beta }_{*}}({{\gamma }_{\alpha }})\) (dotted curves in Fig. 1) monotonically increases at \({{\gamma }_{1}} = {{\gamma }_{2}}\). This fact does not mean that the quasi-critical value of the follower force is not implemented at all. The irregularity of the damping distribution over the degrees of freedom brings a wide variety into the \({{\beta }_{*}}({{\gamma }_{\alpha }})\) curves. In Fig. 1a, fixed values of the energy dissipation in the second joint (\({{\gamma }_{2}} = 0.1\) and \({{\gamma }_{2}} = 1\)) are rather small but still reduce \({{\beta }_{*}}\) considerably. Further, the curves \({{\beta }_{*}}({{\gamma }_{1}})\) increase in different ways depending on the value of \({{\gamma }_{2}}\).
At fixed values of the energy dissipation at the first joint (\({{\gamma }_{1}} = 0.1\) and \({{\gamma }_{1}} = 1\)) and at \({{\gamma }_{2}} \to 0\) (Fig. 1b), the quasi-critical value of the follower force \({{\beta }_{{{\text{**}}}}}\) is implemented. Further, while \({{\gamma }_{2}}\) grows, the curves \({{\beta }_{*}}({{\gamma }_{1}})\) can decrease, as happens at \({{\gamma }_{1}} = 0.1\), or behave nonmonotonically (\({{\gamma }_{1}} = 1\)), and even attain a minimum. This minimum can be explained by the behavior of the characteristic indicators. Here \({{\lambda }_{2}}\), one of the characteristic indicators, crosses the imaginary axis several times.
BECK’S PROBLEM
Now we consider a distributed parameter system. Among the linear models of energy dissipation, we consider the external friction proportional to the velocity of transition of points of an elastic system, and the internal friction in a material according to the Voigt model. Let us consider the known Beck problem (compression of a linear cantilever bar by a follower force). Assuming the standard denotations, we can write the equation of perturbed motion in the following form:
where \({{b}_{i}}\) and \({{b}_{e}}\) are the coefficients of the internal (Voigt model) and external friction, respectively. The boundary conditions can be written as
Using dimensionless parameters
we rewrite Eq. (3) and boundary conditions (4) in the following form:
The homogeneous boundary problem (6) and (7) can be solved by different methods. For example, by direct integration of Eq. (6) using the flutter condition, the critical value of the follower force parameter can be found by reducing the problem to the optimization problem [6]. Another way is to reduce the distributed system to the finite-dimensional system [2]. One of these methods is the finite element method or the method of expansion of the solution \(w(\xi ,\tau )\) of Eq. (6) in terms of an orthogonal system of functions. In order to find the solution to this problem as a system of such functions, we can write the following equation, assuming that the forms of natural oscillations of the cantilever bar \({{\varphi }_{k}}\left( \xi \right)\) satisfy boundary conditions (7)
Substituting this expression into Eq. (6) and applying the Bubnov–Galerkin method, we obtain a system of ordinary differential equations with respect to the generalized coordinates \({{q}_{k}}\left( \tau \right)\). The matrix form of these equations can be written as
Matrices \({\mathbf{A}}\), C, and \({\mathbf{D}}\) with the dimensions \(n \times n\) included in Eq. (9) are calculated by the formulas
Having represented the generalized coordinate vector by the characteristic indices \(\lambda \) in the form of \({\mathbf{q}}\left( \tau \right) = {{{\mathbf{q}}}_{0}}\exp (\lambda \tau )\), we obtain the matrix equation of type (2)
where the following denotations are used
The results of investigation of the dependence of the critical value of the follower force on the damping parameters are presented in Fig. 2.

Influence of (a) the external friction \({{\varepsilon }_{e}}\) and (b) the internal friction \({{\varepsilon }_{i}}\) on the critical values of the follower force.
Many papers show that the quasi-critical value of Beck’s problem obtained in the absence of any damping is \({{\beta }_{{{\text{**}}}}} = 20.05\). The dashed line in Fig. 2a show the dependence of the critical value of the follower force on the internal friction coefficient \({{\beta }_{{\text{*}}}}({{\varepsilon }_{i}})\) in the absence of external friction \({{\varepsilon }_{e}} = 0\). The assumed initial value of \({{\varepsilon }_{i}}\) is \({{10}^{{ - 10}}}\). This curve increases monotonically; but the strongly pronounced effect of the destabilizing influence of the interior friction is exhibited in that this curve originates from the value \(10.95\), i.e., at \({{\varepsilon }_{i}} \to 0\) and \({{\varepsilon }_{e}} = 0\), so that the critical value of the follower force is almost half the size of the quasi-critical value. The dashed line corresponds to the proportional growth of both the internal friction in the range \({{\varepsilon }_{i}} \in [{{10}^{{ - 10}}};0.2]\) and the external friction with the relation \({{\varepsilon }_{e}} = 10{{\varepsilon }_{i}}\).
Proceeding from the value \({{\beta }_{*}} = 12.89\), the curve \({{\beta }_{*}}({{\varepsilon }_{i}})\) also increases monotonically. The curves \({{\beta }_{*}}({{\varepsilon }_{i}})\) behave differently at a certain finite value of the external friction \({{\varepsilon }_{e}}\). In particular, the values \({{\varepsilon }_{e}} = 0.1\), \({{\varepsilon }_{e}} = 0.5\), and \({{\varepsilon }_{e}} = 1\) are assumed. These curves originate near the quasi-critical value \({{\beta }_{{{\text{**}}}}}\); they have an isolated minimum and render a destabilizing influence on the bar stability in a certain range.
In Fig. 2b, the dependences of the critical value of the follower force on the external friction \({{\beta }_{{\text{*}}}}({{\varepsilon }_{e}})\) are presented in the range of \({{\varepsilon }_{e}} \in \left[ {0;2} \right]\) at different fixed values of the internal friction. The analysis of Fig. 2 shows that destabilization takes place only at small values of the internal friction.
If the internal friction is zero \({{\varepsilon }_{i}} = 0\), the critical values of the follower force increase. However, this dependence (in Fig. 2b, it is shown for comparison by the dashed line) is not strong, since, when \({{\varepsilon }_{e}}\) varies from 0 to 2, the critical force parameter changes from its quasi-critical value \({{\beta }_{{{\text{**}}}}} = 20.05\) to \({{\beta }_{{{\text{**}}}}} = 20.26\), i.e., by only 1.05%.
STABILITY OF THE PLATE
Below we consider the flutter of a flat plate in a gas flow. At high supersonic velocities, the perturbed pressure \(p\) on the plate can be determined by the following approximate formula:
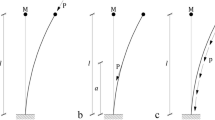
where \({{p}_{0}}\) is the unperturbed pressure; \({{\rho }_{\infty }}\) is the gas density; \(U\) is the velocity of the oncoming flow; and \(v\) is the sound velocity. The expression in brackets on the right side of the equation is a transverse component of velocity of the particles of gas that flows around the oscillating plate. As described in many papers, we consider an elastic flat board (plate) with thickness \(h\), which is supported by joints on every side, at \(x = 0\) and \(x = a\), elongated in the direction orthogonal to the flow. This enables us to assume that the state of cylindrical bending is implemented in the plate, and that the normal flexure of the plate \(w\left( {x,t} \right)\) can be considered as a function of only the coordinate \(x\) and the time \(t\).
The plate is in a supersonic gas flow with the unperturbed velocity \(U\) directed along the axis \(Ox\). We assume, for simplification, that the internal and external unperturbed pressures are equal, and write the oscillations equation for the plate in the form of
Here \(D\) is the cylindrical rigidity of the plate, \(\rho h\) is the mass of the plate per unit area, and \({{b}_{i}}\) is the viscoelasticity coefficient for the Voigt model.
Let us write Eq. (11) in dimensionless form
where the following dimensionless parameters are introduced
Here \({{\omega }_{0}}\) is the first eigenfrequency of the plate supported at the edges by joints under cylindrical bending; \({{\varepsilon }_{i}}\) is the dimensionless coefficient of internal friction; and \({{\varepsilon }_{e}}\) is the dimensionless coefficient of aerodynamic friction.
The method of expansion in terms of natural oscillation modes was also applied to solve the problem. In this case, the equation of the perturbed motion with respect to the generalized coordinates can be written as
Here the matrices \({\mathbf{A}}\) and \({\mathbf{C}}\) are calculated by formulas (10), and the matrix \({\mathbf{B}}\) is found by the integral
Thus, we have the following equation for the characteristic quantities:
In Fig. 3a, the dependences of the critical velocity of the plate flutter on the internal friction are shown at different values of the coefficient of aerodynamic friction \({{\varepsilon }_{e}}\). Monotonic growth of the critical velocity takes place only in the case of \({{\varepsilon }_{e}} = 0\) (dotted curve). If the aerodynamic friction is nonzero, the dependence \({{\beta }_{*}}({{\varepsilon }_{i}})\) has an isolated minimum near \({{\varepsilon }_{i}} \approx 0.3\). Destabilization occurs when internal friction is introduced into the system (Fig. 3b).

Dependence of the plate flutter velocity on (a) the internal friction and (b) the external friction.
CONCLUSIONS
Hence, the influence of damping on critical values is quite diverse. For systems with a finite number of degrees of freedom, the critical values of nonconservative loads and the destabilization phenomenon depend greatly on the dissipation distribution over the degrees of freedom, while for the distributed systems, the nature of energy dissipation is determinative. The results of the studies can be applied in engineering stability calculations of mechanical systems and the design of modern technological objects.
REFERENCES
Nikolai, E.L., On the stability of the rectilinear form of equilibrium of a compressed and twisted rod, Izv. Leningr. Politekh. Inst., 1928, no. 31; Nikolai, E.L., Trudy po mekhanike (Works in Mechanics), Moscow: Gostekhizdat, 1955, p. 356.
Bolotin, V.V., Nekonservativnye zadachi teorii uprugoi ustoichivosti (Non-Conservative Problems of the Theory of Elastic Stability), Moscow: Fizmatgiz, 1961.
Feodos'ev, V.I., Izbrannye zadachi i voprosy po soprotivleniyu materialov (Selected Tasks and Questions on the Resistance of Materials), Moscow: Nauka, 1973.
Paidoussis, M.P., Dynamics of tubular cantilevers conveying fluid, J. Mech. Eng. Sci., 1970, vol. 612, no. 2, p. 85.
Elishakoff, I., Resolution of the 20th Century Conundrum in Elastic Stability, Florida: Atlantic Univ., 2014.
Radin, V.P., Samogin, Yu.N., Chirkov, V.P., and Shchugorev, A.V., Resheniene konservativnykh zadach teorii ustoichivosti (The Solution of Non-Conservative Problems of Stability Theory), Moscow: Fizmatlit, 2017.
Ziegler, H., Principles of Structural Stability, Birkhäuser, Basel: Springer, 1977.
Bolotin, V.V. and Zhinzher, N.I., Effects of damping on stability of elastic systems subjected to nonconservative forces, J. Sound Vibr., 1969, vol. 5, no. 9, p. 965.
Herrmann, G. and Jong, C., On the destabilizing effect of damping in nonconservative elastic systems, J. Appl. Mech., 1965, vol. 32, no. 3, p. 592.
Kirillov, O.N. and Seyranian, A.R., Stabilization and destabilization of a circulatory system by small velocity-dependent forces, J. Sound Vibr., 2005, vol. 283, no. 3, p. 781.
Sugiyama, Y. and Langthjem, M., Physical mechanism of the destabilizing effect of damping in continuous non-conservative dissipative systems, Int. J. Non-Linear Mech., 2007, vol. 42, no. 1, p. 132.
Doar, O., Dissipation effect on local and global stability of fluid-conveying pipes, J. Sound Vibr., 2010, vol. 329, no. 1, p. 72.
Luongo, A. and D’Annibale, F., On the destabilizing effect of damping on discrete and continuous circulatory systems, J. Sound Vibr., 2014, vol. 333, no. 24, p. 6723.
Tommasini, M., Kirillov, O.N., Misseroni, D., and Bigoni, D., The destabilizing effect of external damping: singular flutter boundary for the Pfluger column with vanishing external dissipation, J. Mech. Phys. Solids, 2016, vol. 91, p. 204.
Tommasini, M., Kirillov, O.N., Misseroni, D., and Bigoni, D., The destabilizing effect of external damping: singular flutter boundary for the Pfluger column with vanishing external dissipation, J. Mech. Phys. Solids, 2016, vol. 91, p. 204.
Luongo, A. and D’Annibale, F., On the destabilizing effect of damping on discrete and continuous circulatory systems, J. Sound Vibr., 2014, vol. 333, no. 24, p. 6723.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
The authors declare they have no conflict of interest.
Additional information
Translated by N. Semenova
About this article

Cite this article
Radin, V.P., Chirkov, V.P., Novikova, O.V. et al. The Damping Effect on Critical Values of Nonconservative Loads. J. Mach. Manuf. Reliab. 49, 122–128 (2020). https://doi.org/10.3103/S1052618820020120
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1052618820020120