
Abstract
This article deals with two different methods to solve a time fractional partial integro-differential equation. The fractional derivatives are defined here in Caputo sense. The model problem is solved using the Adomian decomposition method and homotopy perturbation method. Moreover, this paper proves the convergence analysis of the solution based on the present methods. Numerical evidences are illustrated in support of the theoretical analysis.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
This article considers a non-linear time fractional partial integro-differential equation (FPIDE) as follows:
where fractional order derivative \(D^\beta _t\) is represented in Caputo sense and \(0<\beta < 1\). Here the kernel function is symbolized as \({\mathcal {K}}\). w(x, t) be the unknown continuous function defined \(\forall (x,t)\in ([a,b]\times (0,T])\) and g(x, t) is the given function.
The theory and generalizations of fractional calculus expanded greatly over the early twentieth century, though it was already developed in the mid eighteenth century [44]. Numerous contributions by mathematicians have given several definitions for fractional derivatives and integrals. The fractional calculus is applicable in different fields of pure and applied sciences such as aerodynamics, viscoelasticity, heat conduction, mechanics [27, 45] which have attracted several researchers to investigate more in this subject. Many authors have also experimented to find the solution of integral equations, fractional differential equations (FDEs) [36] and fractional partial differential equations (FPDEs) [17]. The numerical and approximation techniques are broadly implemented on most of the FDEs since there is no exact procedure. Many methods including the finite difference method [47, 49], variational iteration method (VIM) [35], homotopy perturbation method (HPM) [50], Adams Bashforth Moulton method [12], generalized differential transform method and the Adomian decomposition method (ADM) [2, 5, 41] have been developed to solve FDEs. Over the years many theories regarding the existence and uniqueness of solutions of FDEs, FPIDEs, fractional integro-differential equations (FIDEs) were developed. One may refer [5, 11, 18]. Recently Hussain et. al. [28] gave the existence and uniqueness of FPIDEs.
The study of FPIDEs have become an indispensable mathematical tool to describe and analyze real world problems in several areas of science and technology. One can refer [3, 4, 21, 43, 48] for the application of FPIDEs. Several numerical techniques involving collocation methods, pseudo operational matrix method have been derived to approximate the solutions of FPIDEs in [24, 25]. Though several works are done with respect to numerical approximation of FPIDEs but very few contributions are there in developing a semi-analytical method to solve FPIDEs involving convergence and uniqueness results. ADM introduced by mathematician G.Adomian [1] in 1984, is a powerful tool to solve large amount of real world problems. The decomposition method is an effective technique to get semi-analytical solutions of the extensive class of dynamical systems without closure approximation, perturbation theory, assumptions of linearization and weak nonlinearity or restrictive assumptions on stochasticity. Momani and Noor [42] applied the ADM to solve the fourth-order FIDE in which the derivatives are defined in Caputo sense. Further, the solution is computed using the homotopy perturbation method (HPM) proposed by He [30] which gives the semi-analytical solution of both the linear and nonlinear problems. One may refer [21, 22, 33, 37] for the solutions of FDE using HPM techniques. The present method requires the aprioi structure of solution with higher order smoothness as series solution is used. However there are plenty of applied models where these are not available. For these type of cases, one need to use the moving mesh methods for the analysis. These methods are available in [13,14,15,16, 20, 46]. The He-Laplace method, which is a modification of homotopy perturbation technique is extremely effective in solving FDE as cited in [6, 7, 34]. The significant benefit of He’s HPM includes the independent construction of perturbation equation by homotopy in topology and the independent decision of selecting the initial approximation. Further convergence of modified homotopy method has largely been discussed in [8, 30, 40]. Recently HPM was used to solve the singularly perturbed differential equations [19, 33, 39]. The results obtained in this paper were helpful for the optimal design of the Fangzhu device. However the reliability of a numerical method and its convergence analysis for parametric problems with singular perturbed nature are considered in several papers [10, 23, 38]. In this work, the time fractional partial integro-differential equation is solved using ADM and HPM techniques. The main advantage of using these methods is that, it gives analytical as well as numerical approximation of the solution which does not involve any mesh discretization. In addition, these methods do not require any large computer memory or power and are also free from rounding off errors. Further, it is noticed that the methods, ADM and HPM work smoothly when the order of the time fractional derivative \(\beta \in (0,1)\) but it may have some complication for HPM if \(\beta >1\).
Throughout the article, \({\varOmega }\) is defined as \(\{{\varOmega }:(x,t)\in ([0,1]\times (0,T])\}\). Caputo operator of fractional derivative is denoted by \(\mathrm {D}^\beta _t\) and the fractional integral is denoted by \(\mathrm {I}^\beta _t\). For a function w(x, t), defined on \(\varOmega \), we define \(\Vert w(x,t)\Vert _\infty =\Vert w(x,t)\Vert =\displaystyle \sup _{x\in \varOmega }|w(x,t)|\) is used.
The arrangement of this article is made in such a way that the basic definitions, notations and theorems are discussed in Sect. 2. Section 3 is devoted to the analysis of the proposed methods. In Sect. 4 the existence, uniqueness and convergence of solution is provided. Section 5 briefly describes the error bounds. Some test examples with rigorous numerical results are given in Sect. 6 and finally Sect. 7 is ended with some concluding remarks.
2 Preliminaries
Some fundamental definitions and associated properties are discussed here which will be helpful in the future.
Definition 1
The Gamma function \(\varGamma (\tau )\) is specified as:
which is valid for all \(\tau \in {\mathbb {C}}\), the complex field, such that \(Re(\tau )>0\). The generalization of the factorial function can be written as follows:
Definition 2
The Gr\(\ddot{u}\)nwald-Letnikov fractional derivative is a basic extension of the derivative in fractional calculus that allows one to take the derivative a non-integer number of times. It is defined as:
Here \(\beta \) is the order of the derivative and considered as a positive real number.
Definition 3
Let \(\beta \ge 0\) be a real number and suppose that \(w(x,t)\in C([a,b]\times (0,T])\). The Riemann-Liouville fractional integral of the function denoted as \(\mathrm {I}_t^\beta w(x,t)\) is defined by:
The exponent \(\beta \in {\mathbb {R}}^+\), be the order of the integral.
Definition 4
Let \(\beta \ge 0\) be any real number and \(m\in {\mathbb {N}}\) such that \(m-1<\beta \le m\). If w(x, t) is a function that has continuous \(n^{th}\) partial derivative with respect to t, then the Riemann-Liouville fractional derivative \(^{RL}\mathrm {D}^\beta _t\) is defined by:
Definition 5
The He’s fractional derivative of order \(\beta \) which is the fractal dimensions of the fractal medium is defined as:
In classical mechanics, the space is always assumed to be continuous, the air flow is continuous, the water flow is continuous and the continuum hypothesis works well for many practical applications. However, if we want to study, for example, molecule diffusion in water, the water becomes discontinuous, and the fractal calculus has to be adopted to describe the motion of molecules, otherwise molecule motion becomes completely unpredictable in the frame of the continuum hypothesis. Similarly, in case of Camassa–Holm (C–H) equation, when time tends to infinitively small, the classic C–H equation will not be continuous, while (4) can describe the motion well. One may refer [32] for details.
Definition 6
The Caputo fractional derivative of order \(\beta >0\) is defined as:
If w is a constant function, then \(\mathrm {D}_t^\beta w=0\). For any \(\nu \in {\mathbb {R}}\), \(m\in {\mathbb {N}}\), we have,
-
1.
\(\mathrm {D}_t^\beta t^\nu ={\left\{ \begin{array}{ll} 0, &{}\text{ if } 0<\beta<1,\;\nu \le 0, \\ \dfrac{\varGamma (\nu +1)}{\varGamma (\nu -\beta +1)}t^{\nu -\beta }, &{}\text{ if } 0<\beta <1,\;\nu > 0. \end{array}\right. }\)
-
2.
\(\mathrm {I}_t^\beta t^\nu =\dfrac{\varGamma (\nu +1)}{\varGamma (\nu +\beta +1)}t^{\nu +\beta }, \qquad \text{ if } 0<\beta <1,\;\nu \ge 0\).
For any continuous function w(x, t) where \(w(x,t)\in C([0,1]\times (0,T])\), the following properties holds true:
-
1.
\( \mathrm {D}_t^\beta \mathrm {I}_t^\beta w(x,t)=w(x,t)\).
-
2.
\(\mathrm {I}_t^\beta \mathrm {D}_t^\beta w(x,t)=w(x,t) -w(x,0)\), \(0<\beta <1\).
Definition 7
Let \(({\mathscr {D}},||\cdot ||)\) be a normed space and \(\mathfrak {I}:{\mathscr {D}}\rightarrow \) \({\mathscr {D}}\) be a mapping such that \(x\in {\mathscr {D}}\) is called a fixed point of \(\mathfrak {I}\) if \(\mathfrak {I}x=x\).
Definition 8
\(\mathfrak {I}\) is called a contraction mapping on \(({\mathscr {D}},||\cdot ||)\) if there exists a real number \(c\in (0,1)\) such that,
Theorem 1
(Banach fixed point theorem) Let \(\mathfrak {I}:{\mathscr {D}}\rightarrow {\mathscr {D}}\) be a contraction mapping on a complete normed space \(({\mathscr {D}},||\cdot ||)\). Then \(\mathfrak {I}\) has a unique fixed point.
Definition 9
Let \({\mathcal {F}}:{\mathcal {Q}}\rightarrow {\mathscr {D}}\) be a function where \({\mathcal {Q}}\subseteq {\mathbb {R}}^n\). \({\mathcal {F}}\) satisfies Lipschitz condition if \(\exists \) a constant \(L\ge 0\) such that \( ||{\mathcal {F}}y_1-{\mathcal {F}}y_2||\le L||y_1-y_2||\) \(\forall \;\; y_1,y_2\in {\mathcal {Q}}\).
3 Methodology
3.1 Analysis of ADM
According to this method, the solution of (1) can be dictated as an infinite series:
In order to solve (1) using ADM, \(\mathrm {I}^{\beta }_t\) is operated on both sides of (1), so as to get,
The decomposition of nonlinear function F can be written as:
Here \({\mathcal {A}}_n\), the Adomian polynomial is defined as:
The Adomian polynomials [1, 2, 5] are one of the most important mathematical tools to approximate the nonlinear functions in the numerical algorithm which can be easily calculated by the above formula (9). The first few terms are given below:
The components \(w_0,w_1,w_2,\ldots w_n,\) are determined recursively by
Here \(w(x,t)=\displaystyle \lim _{n\rightarrow \infty }\sum _{i=0}^{n}w_i(x,t)\) gives us the solution. By truncating the series, the required numerical solution is obtained by (8) up to finite (say N) number of terms. The N terms numerical approximation is defined as: \(\varPsi _N=\displaystyle \sum _{n=0}^{N-1}w_n(x,t).\) In this method \(w_0\) is defined by the initial condition g(x, t) and the other components namely \(w_1,w_2,\ldots w_n,\) are thereby derived recursively.
3.2 Analysis of HPM
Homotopy \(H:{\varOmega }\times [0,1]\rightarrow {\mathbb {R}}\) for (1) is constructed as in [30]:
or
where embedding parameter \({\tilde{p}}\in [0,1]\). Putting \({\tilde{p}}=0\), now (12) turns to be a linear equation and when \({\tilde{p}}=1\), then (12) boils down to (1). Further, the solution of (1) can be expressed in the form of series:
Taking \({\tilde{p}}=1\) in (13), approximated solution of (1) is obtained as,
The convergence of series (14) has been proved in [31]. In order to obtain the solution, identical power of \({\tilde{p}}\) are equated by substituting (14) into (12) and a set of linear equations are attained as follows:
Computation of approximated solution is obtained by applying \(\mathrm {I}_t^\beta \) to the IVPs in (15)–(17). Finally the series solution of HPM is approximated by the following N-term truncated series:
One can clearly observe that each non-homogeneous part of these linear differential equations gives Adomian polynomials respectively. Also because ADM assumes a series solution for (1) given by \(w(x,t)=\displaystyle \lim _{n\rightarrow \infty }\sum _{i=0}^{n}w_i(x,t),\) consequently, the usage of the Taylor series expansion in HPM makes some reduction on the method and it coincides with the ADM.
4 Existence and convergence
For further analysis, the following assumptions are needed.
Assumption 1
A nonlinear function F(w) is considered such that F(w) satisfies Lipschitz constant L. Therefore, we have
Assumption 2
The kernel \({\mathcal {K}}\) defined in (1) is continuous and bounded on \((x,t)\in ([0,1]\times (0,T])\). Then there exists \(\mathrm {M}>0\) such that \(||{\mathcal {K}}||\le \mathrm {M}\).
In this section, the proof of the existence and uniqueness of the solution for FPIDE (1) is established. Consider the FPIDE (1):
with initial condition \(w(x,0)=\lambda _0(x)\). Applying \(\mathrm {I}^\beta _t\) on both the sides of (1) yields \(w=\mathfrak {I}w\), \(\forall (x,t)\in ([0,1]\times (0,T])\), where \(\mathfrak {I}w\) is defined as
Theorem 2
Consider that assumption (1)–(2) holds true. For the FPIDE (1) with initial condition, there exists a unique w(x, t) for all \((x,t)\in ([0,1]\times (0,T])\) if \(L<\dfrac{\varGamma (\beta +2)}{\mathrm {M}T^{\beta +1}}\).
Proof
The set of all continuously differentiable functions defined over the region \({\varOmega }\) form a complete normed space with supremum norm. Also, as it is seen that (19) is given in operator form \(\mathfrak {I}w=w\) and therefore, it remains to show that \(\mathfrak {I}\) is a contraction mapping and for this purpose we take \(w_1,w_2\in C({\varOmega })\). So,
and since \(L<\dfrac{\varGamma (\beta +2)}{\mathrm {M}T^{\beta +1}}\), which implies that \(\dfrac{\mathrm {M}LT^{\beta +1}}{\varGamma (\beta +2)}<1\). Therefore, by general Banach contraction mapping principle, \(\mathfrak {I}\) has a unique fixed point, which means that (1) has a unique solution. Hence, this proves the uniqueness and existence of solution for the model problem. One may refer [28] for more details. \(\square \)
4.1 Convergence analysis
Theorem 3
Suppose that assumption (1) and (2) hold. If the series solution
and \(||w_1||_\infty <\infty \) obtained by q th-order deformation is convergent, then it converges to the exact solution of (1).
Proof
Let \(C({\varOmega },\Vert \cdot \Vert )\) be the Banach space of all continuous functions with \(|w_1(x,t)|\le \infty \) \(\forall \) \((x,t)\in ([0,1]\times (0,T])\).
First we define the sequence of partial sums as \(s_p\). Let \(s_p\) and \(s_q\) be arbitrary partial sums with \(p\ge q\). We claim that
is a Cauchy sequence in this Banach space. To do so,
So,
where,
Let \(p=q+1\), then
So,
Since \(0<\vartheta <1\), we have \((1-\vartheta ^{p-q})<1\), and then
But \(\Vert w_1(x,t)\Vert _\infty <\infty \), so as \(m\rightarrow \infty \), then
We conclude that \(s_p\) is a Cauchy sequence in \(C([0,1]\times (0,T])\). Therefore
Then, the series is convergent. Readers may go through [9] for the proof of ADM for nonlinear problems. \(\square \)
5 Error bounds
The exact solution for (1) is given by \(w(x,t)=\displaystyle {\lim _{N\rightarrow \infty }}\varPsi _N\) and the numerical solution can be obtained by truncating the series (8) up to finite number of terms. If \(\varPsi _N\) gives the N terms approximate solution then the absolute point-wise error bound depends on the partial sum \(\displaystyle {\sum _{n=0}^{N-1}}w_n(x,t)\) and which is bounded by \(\mathrm {M}\dfrac{\vartheta ^q}{1-\vartheta }\), where \(\vartheta \) is defined in (23) satisfying \(0<\vartheta <1\). Refer [29].
6 Illustrative examples
Here are some test problems to show the effectiveness of proposed methods.
Example 1
Consider the following test problem:
where \(0<\beta <1\). f(x, t) and \({\mathcal {K}}\) are given by \(f(x,t)=\dfrac{(\sin \pi x)t^{0.25}}{\varGamma (1.25)}- \dfrac{1}{4}xt^4\sin ^2\pi x\) and \({\mathcal {K}}=xt\) respectively. The exact solution for the given test problem is \(w(x,t)=t\sin \pi x\).
Example 2
Consider the following nonlinear FPIDE:
where the kernel function is given by \({\mathcal {K}}=te^x\) and \(\beta \in (0,1)\). The exact solution for the given test problem is \(w(x,t)=e^xt^2\).
Example 3
Consider the following test problem:
The exact solution for the given test problem is \(w(x,t)=xt^{\beta }\). \(0<\beta <1\) and the kernel function is given by \({\mathcal {K}}=e^x.\)
The absolute point-wise error is defined by:

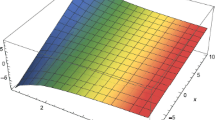
Solution and error plots with different values of \(\beta \) for Example 1

Solution and error plots at \(t=0.8\) for Example 2
6.1 Results and discussion
The absolute point-wise errors for Example 1 with \(\beta =0.2\) is presented in Table 1 using ADM and Table 2 with \(\beta =0.75\) using HPM. Similarly, the absolute point wise errors for Example 2 at \(t=0.5\) and \(\beta =0.75\) are viewed in tabular form in Table 3 using ADM. Also, Table 4 represent the errors for Example 2 using HPM for \(t=0.8\) at \(\beta =0.25\). Incase of Example 3 for \(t\in (0,2]\), absolute point-wise errors are represented in Table 5 for \(\beta =0.85\). Further Table 6 show the errors for Example 3 at \(\beta =0.85\) for \(t\in (0,3]\). It can be easily seen that for different values of \(\beta \), error \(E_N^\infty \) decreases as the number of terms in the series increases. Comparison of results for both the methods are made. Table 7 compares the error using two terms between ADM and VIM. Similarly comparison between HPM and VIM is shown in Table 8 which proves the robustness of our proposed methods. One may refer [26] for the details on VIM.
The graphical representation of the absolute point-wise errors is shown in Figs. 1 and 2. The graphs depict the convergence of the proposed methods for various values of \(\beta \). Fig. 1(a) represent the exact solution along with the approximated solutions for two terms taking \(\beta =0.2\) using ADM and Fig. 1(b) represent the error plot using HPM by taking two terms in the series. Similarly in case of nonlinear FPIDE, Fig. 2(a) shows the exact solution and the aproximated solutions for Example 2 using three terms in the series wih \(\beta =0.75\) using HPM. It can be observed that approximated solutions gradually converges with the exact solution. The error plot for Example 2 is shown in Fig. 2(b) which represents that the error curves moves towards zero as the number of terms in the series increases.
7 Conclusion
This article successfully operated the Adomian decomposition and the homotopy perturbation method to solve the time fractional partial integro-differential equation. The methods are free from discretization. In addition, the reliability of the methods and the reduction in the computational work scale gives them greater applicability. The uniqueness and convergence analysis of the technique is briefly described. Finally convergence to the exact solution is shown with the help of graphs and tables.
References
Adomian, G.: A review of the decomposition method in applied mathematics. J. Math. Anal. Appl. 135(2), 501–544 (1988)
Arora, H.L., Abdelwahid, F.I.: Solutions of non-integer order differential equations via the Adomian decomposition method. Appl. Math. Lett. 6(1), 21–23 (1993)
Atanackovic, T.M., Stankovic, B.: On a system of differential equations with fractional derivatives arising in rod theory. J. Phys. A Math. Theor. 37(4), 1241 (2004)
Assaleh, K., Ahmad, W.M.: Modeling of speech signals using fractional calculus, 9th international symposium on signal processing and its applications, pp. 1-4, (2007)
Alkahtania, B.S., Goswami, P., Algahtanic, O.J.: Adomian decomposition method for n-dimensional diffusion model in fractal heat transfer. J. Nonlinear Sci. Appl. (2016). https://doi.org/10.1002/mma.7369
Anjum, N., He, J.H.: Homotopy perturbation method for NMEMS oscillators. Meth. Appl. Sci, Math (2020). pp.1-15. https://doi.org/10.1002/mma.6583
Anjum, N., Hui, C.H., He, J.H.: Two-scale fractal theory for the population dynamics. Fractals (2021). https://doi.org/10.1142/S0218348X21501826
Anjum, N., He, J.H., Ain, Q.T., Tian, D.: Li-He’s modified homotopy perturbation method for doubly-clamped electrically actuated microbeams-based microelectromechanical system, Facta Universitatis. Mechanical Engineering, Series (2021). (https://doi.org/10.22190/FUME210112025A)
Babolian, E., Vahidi, A.R., Azimzadeh, Z.: A comparison between Adomian’s decomposition method and the homotopy perturbation method for solving nonlinear differential equations. J. Appl. Sci. 12(8), 793–797 (2012)
Chandru, M., Das, P., Ramos, H.: Numerical treatment of two-parameter singularly perturbed parabolic convection diffusion problems with non-smooth data. Math. Meth. Appl. Sci. 14, 5359–5387 (2018). https://doi.org/10.1002/mma.5067
Diethelm, K., Ford, N.J.: Analysis of fractional differential equations. J Math. Anal. Appl. 265(2), 229–248 (2002)
Diethelm, K., Ford, N.J., Freed, A.D.: Detailed error analysis for a fractional Adams method. Numer. Algorithms 36(1), 31–52 (2004)
Das, P., Natesan, S.: Optimal error estimate using mesh equidistribution technique for singularly perturbed system of reaction-diffusion boundary-value problems. Appl. Math. Comput. 249, 265–277 (2014)
Das, P.: Comparison of a priori and a posteriori meshes for singularly perturbed nonlinear parameterized problems. J. Comput. Appl. Math. 290, 16–25 (2015)
Das, P., Mehrmann, V.: Numerical solution of singularly perturbed convection-diffusion-reaction problems with two small parameters. BIT Numer. 56(1), 51–76 (2016)
Das, P.: A higher order difference method for singularly perturbed parabolic partial differential equations. J. Differ. Equ. Appl. 243, 452–477 (2018)
Dubey, R.S., Goswami, P.: Analytical solution of the nonlinear diffusion equation. Eur. Phys. J. Plus 133(5), 183 (2018). https://doi.org/10.1016/j.cam.2020.113116
Das, P., Rana, S., Ramos, H.: Homotopy perturbation method for solving Caputo-type fractional-order Volterra-Fredholm integro-differential equations. Comput. Math. Methods (2019). https://doi.org/10.1002/cmm4.1047
Das, P.: A posteriori based convergence analysis for a nonlinear singularly perturbed system of delay differential equations on an adaptive mesh. Numer. Algorithms 81(2), 465–487 (2019)
Das, P., Aguiar, J.S.: Parameter uniform optimal order numerical approximation of a class of singularly perturbed system of reaction diffusion problems involving a small perturbation parameter. J. Comput. Appl. Math. 354, 533–544 (2019)
Das, P., Rana, S., Ramos, H.: On the approximate solutions of a class of fractional order nonlinear Volterra integro-differential initial value problems and boundary value problems of first kind and their convergence analysis. J. Comput. Appl. Math. (2020). https://doi.org/10.1016/j.cam.2020.113116
Das, P., Rana, S., Ramos, H.: A perturbation based approach for solving fractional order Volterra-Fredholm integro-differential equations and its convergence analysis. Int. J. Comput. Math. 97(10), 1994–2014 (2020)
Das, P., Rana, S., Aguiar, J.V.: Higher order accurate approximations on equidistributed meshes for boundary layer originated mixed type reaction diffusion systems with multiple scale nature. Appl. Numer. Math. 148, 79–97 (2020). https://doi.org/10.1016/j.apnum.2019.08.028
Dehestani, H., Ordokhani, Y., Razzaghi, M.: Pseudo-operational matrix method for the solution of variable-order fractional partial integro-differential equations, Eng. Comput., pp. 1-16, (2020)
Guo, J., Xu, D., Qiu, W.: A finite difference scheme for the nonlinear time-fractional partial integro-differential equation. Math. Meth. Appl. Sci. 43, 3392–3412 (2020)
Hussain, A.K., Rusli, N., Fadhel, F.S., Yahya, Z.R.: Solution of one-dimensional fractional order partial integro-differential equations using variational iteration method. AIP Publ. LLC 1775(1), 30–96 (2016)
Hamoud, A.A., Ghadle, K.P.: On the numerical solution of nonlinear Volterra-Fredholm integral equations by variational iteration method. Int. J. Adv. Sci. Tech. Res. 3, 45–51 (2016)
Hussain, A.K., Fadhel, F.S., Rusli, N., Yahya, Z.R.: On the existence and uniqueness of fractional order partial integro-differential equations. Far East J. Math. Sci. 102(1), 121–136 (2017)
Hamoud, A.A., Ghadle, K.P.: Modified Laplace decomposition method for fractional Volterra-Fredholm integro-differential equations. J. Math. Model. 6(1), 91–104 (2018)
He, J.H.: Homotopy perturbation technique. Comput. Methods Appl. Mech. Engng. 178(3/4), 257–262 (1999)
He, J.H.: Non-perturbative methods for strongly nonlinear problems, Dissertation, de-Verlag im Internet GmbH, (2006)
He, J.H.: A short review on analytical methods for a fully fourth-order nonlinear integral boundary value problem with fractal derivatives. Int. J Numer. Method H. (2020). https://doi.org/10.1108/HFF-01-2020-0060
He, J.H., El-Dib, Y.O.: Homotopy perturbation method for Fangzhu oscillator. J. Math. Chem. 58, 2245–2253 (2020). https://doi.org/10.1007/s10910-020-01167-6
He, J.H., Moatimid, G.M., Mostapha, D.R.: Nonlinear instability of two streaming-superposed magnetic Reiner-Rivlin fluids by He-Laplace method. J. Electroanal. 895, 115388 (2021)
Inc, M.: The approximate and exact solutions of the space-and time-fractional Burgers equations with initial conditions by variational iteration method. J. Math. Anal. Appl. 345(1), 476–484 (2008)
Jafari, H., Prasad, J.G., Goswami, P., Dubey, R.S.: Solution of the local fractional generalized KDV equation using homotopy analysis method. Fractals (2021). https://doi.org/10.1142/S0218348X2140014
Kilicman, A., Shokhanda, R., Goswami, P.: On the solution of (n+1)-dimensional fractional M-Burgers equation. Alex. Eng. J. 60(1), 1165–1172 (2021). https://doi.org/10.1016/j.aej.2020.10.040
Kumar, K., Podila, P.C., Das, P., Ramos, H.: A graded mesh refinement approach for boundary layer originated singularly perturbed time-delayed parabolic convection diffusion problems. Math. Meth. Appl. Sci. (2021). https://doi.org/10.1002/mma.7358
Kumar, K., Podila, P.C., Das, P., Ramos, H.: A graded mesh refinement approach for boundary layer originated singularly perturbed time-delayed parabolic convection diffusion problems. Math Meth. Appl. Sci. (2021). https://doi.org/10.1002/mma.7358
Li, X.X., He, C.H.: Homotopy perturbation method coupled with the enhanced perturbation method. J. Low Freq. Noise V. A. 38(3–4), 1399–1403 (2019)
Momani, S., Odibat, Z.: Analytical solution of a time fractional Navier Stokes equation by Adomian decomposition method. Appl. Math. Comput. 177(2), 488–494 (2006)
Momani, S., Noor, M.A.: Numerical methods for fourth-order fractional integro-differential equations. Appl. Math. Comput. 182(1), 754–760 (2006)
Mirzaee, F., Samadyar, N.: On the numerical method for solving a system of nonlinear fractional ordinary differential equations arising in HIV infection of \(CD4 ^{+}\)T cells, Iran J. Sci. Tchnol, A, Transactions A: Science, 43(3), pp. 1127-1138, (2019)
Podlubny, I.: Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and some of Their Applications. Elsevier, Amsterdam (1999)
Al-Smadi, M., Gumah, G.: On the homotopy analysis method for fractional SEIR epidemic model. Res. J. Appl. Sci. Engrg. Technol. 7, 3809–3820 (2014)
Shakti, D., Mohapatra, J., Das, P., Aguiar, J.V.: A moving mesh refinement based optimal accurate uniformly convergent computational method for a parabolic system of boundary layer originated reaction-diffusion problems with arbitrary small diffusion terms. J. Comput. Appl. Math. (2020). https://doi.org/10.1016/j.cam.2020.113167
Santra, S., Mohapatra, J.: Analysis of the L1 scheme for a time fractional parabolic-elliptic problem involving weak singularity. Math. Meth. Appl. Sci. 44, 1529–1541 (2021). https://doi.org/10.1002/mma.6850
Torrejon, R., Yong, J.: On a quasilinear wave equation with memory. Nonlinear Anal. 16(1), 61–78 (1991)
Tadjeran, C., Meerschaert, M.M.: A second-order accurate numerical method for the two-dimensional fractional diffusion equation. J. Comput. Phys. 220(2), 813–823 (2007)
Wang, Q.: Homotopy perturbation method for fractional KdV equation. Appl. Math. Comput. 190(2), 1795–1802 (2007)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Panda, A., Santra, S. & Mohapatra, J. Adomian decomposition and homotopy perturbation method for the solution of time fractional partial integro-differential equations. J. Appl. Math. Comput. 68, 2065–2082 (2022). https://doi.org/10.1007/s12190-021-01613-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12190-021-01613-x
Keywords
- Partial integro-differential equation
- Caputo fractional derivative
- Adomian decomposition method
- Homotopy perturbation method
- Convergence analysis