
Abstract
In this article, we devote ourselves to building a stabilized finite volume element (SFVE) method with a non-dimensional real together with two Gaussian quadratures of the nonlinear incompressible viscoelastic flow equation in a two-dimensional (2D) domain, analyzing the existence, stability, and error estimates of the SFVE solutions and verifying the validity of the preceding theoretical conclusions by numerical simulations.
Similar content being viewed by others

1 Introduction
We assume that \(\Theta\subset R^{2}\) denotes a bounded open domain and consider the 2D nonlinear incompressible viscoelastic flow equation (see [1]).
Problem I
Seek \(\boldsymbol {\sigma}=(\sigma _{l,n})_{2\times2}\) and \(\boldsymbol {u}=(u_{x},u_{y})^{T}\) together with p that satisfy
where \(\boldsymbol {z}=(x,y)\), \(\boldsymbol {\sigma}= (\sigma_{l,n} )_{2\times 2}\) denotes the unknown unsymmetrical stress matrix, \(\boldsymbol {u}=(u_{x},u_{y})^{T}\) the unknown flow velocity, and p the unknown pressure, \(\gamma=1/\mathit{Re}\), Re denotes Reynolds, and the functions \(\boldsymbol {\sigma}^{0}(\boldsymbol {z})\), \(\boldsymbol {\sigma}_{0}(\boldsymbol {z},t)\), \(\boldsymbol {u}^{0} (\boldsymbol {z})\), and \(\boldsymbol {u}_{0}(\boldsymbol {z},t)\) all are known. For the sake of simplicity and without losing universality, we suppose that \(\boldsymbol {\sigma}_{0}(\boldsymbol {z},t)=\boldsymbol {0}\) and \(\boldsymbol {u}_{0}(\boldsymbol {z},t)=\boldsymbol {0}\) in the subsequent analysis.
Certain phenomena, such as the complicated rheological phenomena and the magnetoelectrical phenomena (see [2–5]), can be described with the nonlinear incompressible viscoelastic flow equation, i.e., Problem I. Therefore, it is worthy to study the equation.
Even though the existence and uniqueness of the analytic solution for the 2D nonlinear incompressible viscoelastic flow equation have theoretically been proved (see, e.g., [1, 6]), because the 2D nonlinear incompressible viscoelastic flow equation in the actual engineering applications includes generally intricate computational domain or known data, it can not be usually solved so that one has to find its numerical solutions. Recently, a stabilized mixed finite element (SMFE) method of Problem I has been posed in [7]. However, for all we know, there has not been any report about the SFVE method for the 2D nonlinear incompressible viscoelastic flow equation, i.e., Problem I. Hence, in this study, we devote ourselves to building a SFVE method for the 2D nonlinear incompressible viscoelastic flow equation, i.e., Problem I. In particular, comparing with the SMFE method in [7], the SFVE method here has more merits; for instance, it can easily proceed and supply adaptability for dealing with complex domains (in fact, it could be changed into the finite difference scheme to implement the numerical computations, but one can proceed the theoretical analysis by means of the SMFE method) and can maintain local mass or other conservation laws. Therefore, it would be more effective than the SMFE method in [7].
Though some SFVE methods for the steady Stokes equations, time-dependent Navier-Stokes equations, time-dependent parabolized Navier-Stokes equations, and time-dependent incompressible Boussinesq equations (see [8–11]) have been set up, these four types of equations are thoroughly different from the 2D nonlinear incompressible viscoelastic flow equation here, which includes the unsymmetrical stress matrix complexly coupling with flow velocity. Thus, the study of the existence and convergence for the SFVE solutions of Problem I is confronted with more difficulties, needs more technique, and has greater challenges than the existing methods as aforesaid. However, Problem I holds certain particular applications. Hence, in this article, we first review the weak and the time semi-discretized solutions of the 2D nonlinear incompressible viscoelastic flow equation in Section 2. We then build the SFVE method with a non-dimensional real and two Gaussian quadratures of the 2D nonlinear incompressible viscoelastic flow equation and analyze the existence, stability, and error estimates of the SFVE solutions by means of the SMFE method in Section 3. Next, we employ some numerical experiments to validate the validity of the preceding theoretical conclusions in Section 4. Finally, we draw some conclusions in Section 5.
2 Review of the weak and time discretized solutions of the 2D nonlinear incompressible viscoelastic flow equation
The Sobolev spaces together with their norms applied thereinafter are classical (see [12]). Let \(\boldsymbol {\mathcal {H}}=[H_{0}^{1}(\Theta)]^{2}\) and \(\boldsymbol {\mathcal {W}}=[H_{0}^{1}(\Theta)]^{2\times2}\) together with \(\boldsymbol {\mathcal {M}}= \{\vartheta\in L^{2}(\Theta): \int_{\Theta}\vartheta\,\mathrm{d}\boldsymbol {z}=0 \}\). Thus, the weak form of Problem I is the following.
Problem II
For \(0< t\le T\), seek \((\boldsymbol {u},\boldsymbol {\sigma}, p)\in \boldsymbol {\mathcal {H}}\times \boldsymbol {\mathcal {W}}\times \boldsymbol {\mathcal {M}}\) that satisfies
the above \((\cdot,\cdot)\) is the inner product in \(L^{2}(\Theta )^{2\times2}\) or \(L^{2}(\Theta)^{2}\),
The above \({\mathcal {A}}_{1}(\cdot,\cdot,\cdot)\), \({\mathcal {A}}_{2}(\cdot,\cdot,\cdot)\), \({\mathcal {A}}(\cdot,\cdot)\), and \({\mathcal {B}}(\cdot,\cdot)\) have the following properties (see, e.g., [11, 13–20]):
where \(\beta>0\) is the real. Set
By the same approach as the proofs in [1, 6], we can acquire the following.
Theorem 1
When the original value pair \((\boldsymbol {u}^{0} (\boldsymbol {z}),\boldsymbol {\sigma}^{0}(\boldsymbol {z}))\in[L^{2}(\Theta)]^{2}\times[L^{2}(\Theta)]^{2\times2}\), Problem II has a unique solution \((\boldsymbol {u}, \boldsymbol {\sigma},p)\) in \(\boldsymbol {\mathcal {H}}\times \boldsymbol {\mathcal {W}}\times \boldsymbol {\mathcal {M}}\) merely dependent on the original value pair \((\boldsymbol {\sigma}^{0}(\boldsymbol {z}),\boldsymbol {u}^{0} (\boldsymbol {z}))\).
Let N be the integer, \(k=T/N\) the time step, and \((\boldsymbol {u}^{i}, \boldsymbol {\sigma}^{i}, p^{i})\) the semi-discretized solutions for \((\boldsymbol {u}, \boldsymbol {\sigma}, p)\) at \(t_{i}=ik\) (\(1\le i\le N\)) with respect to time. When the time-derivatives \(\boldsymbol {u}_{t}\) and \(\boldsymbol {\sigma}_{t}\) at moment \(t=t_{i}\) are approximated by \((\boldsymbol {u}^{i}-\boldsymbol {u}^{i-1})/k\) and \((\boldsymbol {\sigma}^{i}-\boldsymbol {\sigma}^{i-1})/k\), severally, the semi-discretized format about time of Problem II can be read as follows.
Problem III
Seek \((\boldsymbol {u}^{i}, \boldsymbol {\sigma}^{i}, p^{i})\in \boldsymbol {\mathcal {H}}\times \boldsymbol {\mathcal {W}} \times \boldsymbol {\mathcal {M}}\) (\(1\leq i\leq N\)) that satisfy
The following conclusion for Problem III was proved in [7].
Theorem 2
Under the same conditions of Theorem 1, if there is a real \(\alpha>0\) such that \(\Vert \nabla\boldsymbol {u}^{i-1} \Vert _{0,\infty}\le\alpha\) and \((1-2k\alpha)>0\) when k is small enough, then Problem III has a unique set of solutions \(\{\boldsymbol {u}^{i}, \boldsymbol {\sigma}^{i}, p^{i}\}_{i=1}^{N} \subset H\times W\times M\) satisfying
where C represents a positive real independent of k. In addition, when the solution \(({\boldsymbol {u}},\boldsymbol {\sigma},p)\in[H^{3}(0,T;H_{0}^{1}(\Theta ))]^{2}\times[H^{2}(0,T;H_{0}^{1}(\Theta))]^{2\times2}\times[H^{2}(0,T; H^{1}(\Theta))]\) for Problem II, we have the error estimations
Remark 1
Conclusions (13) and (14) in Theorem 2 signify that the time semi-discretized solutions to Problem III are stable and attain the optimal error estimates in time. In addition, by the regularity, we know that, when the original value pair \((\boldsymbol {\sigma}^{0}, \boldsymbol {u}^{0})\) is suitably smooth, the solutions to Problem III are bounded so that the conditions \(\Vert \nabla\boldsymbol {u}^{i-1} \Vert _{0,\infty}\le\alpha\) are rational.
3 The SFVE method of the 2D nonlinear incompressible viscoelastic flow equation
3.1 FVE format
In this subsection, we directly build the SFVE format by the time semi-discretized format, i.e., Problem II. Thus, we can bypass the semi-discretized SFVE method about the spatial variables such that our theoretical analysis becomes simpler and more convenient than that in [9].
Let \(\Im_{h} = \{K\}\) represent the quasi-uniform triangulation of Θ̄, where \(h = \max\{\operatorname{diam}(K): K\in\Im_{h}\}\) (see [13, 21]). Let \(\Im_{h}^{*}=\{V_{z}\}\) be a dual partition associated with \(\Im_{h}\) (see [21]), where \(V_{z}\) is surrounded by the line segments between the barycenter \(\boldsymbol {z}_{K}\in K\in\Im_{h}\) and the midpoints of the edges of K, sharing the vertex z of K (see Figure 1). Let \(Z_{h}(K)\) consist of the vertices of \(K\in\Im _{h}\) and \(Z^{\circ}_{h}\) the interior vertices of \(Z_{h}\).

The formulation of the control volume. Chart (a) shows the line segments between the barycenter \(\boldsymbol {z}_{K}\in K\) with the midpoints of the edges of K. Chart (b) denotes a sample of the control volume \(V_{z}\), sharing the vertex z of K.
The trial subspaces for the unsymmetrical stress matrix and velocity together with pressure are, respectively, chosen as follows:
the above \(\mathcal{P}_{1}(K)\) denotes a bivariate linear polynomial set on K.
It is evident that \(\mathcal{W}_{h}\subset\mathcal{W}= H^{1}_{0}(\Theta )^{2\times2}\) and \(\mathcal{H}_{h}\subset \boldsymbol {\mathcal {H}}= H^{1}_{0}(\Theta)^{2}\). For \((\boldsymbol {\varphi}, \boldsymbol {\sigma})\in \boldsymbol {\mathcal {H}}\times\mathcal{W}\), let \((\Pi_{h}\boldsymbol {\varphi},\rho_{h}\boldsymbol {\sigma})\) denote an interpolation operator from \(\boldsymbol {\mathcal {H}}\times\mathcal{W}\) onto \(\mathcal{H}_{h}\times\mathcal{W}_{h}\). By the interpolation theorem (see [13, 21]), we acquire the following:
the above C denotes a positive generic real independent of k and h.
The test subspaces \(\tilde{\mathcal{W}}_{h}\) together with \(\tilde {\mathcal{H}}_{h}\) for the stress matrix together with flow velocity are separately taken as follows:
where \(\mathcal{P}_{0}(V_{z})\) is the constant space on \(V_{z}\) spanning by
For \((\boldsymbol {u}, \boldsymbol {\sigma})\in\mathcal{H}\times\mathcal{W}\), let \((\Pi_{h}^{*}\boldsymbol {u}, \rho_{h}^{*}\boldsymbol {\sigma})\) be an interpolation operator from \(\mathcal{H}\times\mathcal{W}\) onto \(\tilde{\mathcal{H}}_{h}\times\tilde{\mathcal{W}}_{h}\), i.e.,
With the interpolation theorem (see [13, 21]), we acquire
Then the SFVE format with a non-dimensional real and two Gaussian quadratures is read as follows.
Problem IV
Find \((\boldsymbol {u}_{h}^{n},p_{h}^{n},\boldsymbol {\sigma}_{h}^{n})\in\mathcal{H}_{h}\times \mathcal{M}_{h}\times\mathcal{W}_{h}\) (\(1\le i\le N\)) that satisfy
where
\(\delta>0\) denotes a non-dimensional real, \(\int_{K,j}f(\boldsymbol {z})\,\mathrm{d}\boldsymbol {z}\) (\(j = 1, 2\)) represent two suitable Gaussian quadratures on K that are accurate for j (\(j = 1, 2\)) degree polynomial, and \(f(\boldsymbol {z}) =p_{h}\vartheta_{h}\) is a polynomial of degree ≤j.
Therefore, when the test function \(\vartheta_{h}\in\mathcal{M}_{h}\) and \(j = 1\), the trial function \(p_{h}\in\mathcal{ M}_{h}\) has to be a piece-wise constant. Hence, we define a map \(\pi_{h}: L^{2}(\Theta)\rightarrow\hat{\mathcal{W}}_{h}\) satisfying, \(\forall\vartheta\in L^{2}(\Theta)\),
It is obvious that the map \(\pi_{h}\) satisfies (see [18])
Furthermore, by the map \(\pi_{h}\), \(\mathcal{D}_{h}(\cdot,\cdot)\) may denote the following:
3.2 The existence and stability together with convergence of the SFVE solutions
For the sake of analyzing the existence and stability together with convergence of the FVE solutions, we need to use three lemmas (see [8, 13, 19, 21]).
Lemma 3
The following equalities hold:
In addition, \(\mathcal{A}_{h}(\boldsymbol {u}_{h},\Pi^{*}_{h}\varphi_{h})\) is symmetric, positive definite, and bounded, i.e.,
there is a real \(h_{0}\geq h>0\) meeting
Lemma 4
There are the following conclusions:
Furthermore, set \(\vert \!\vert \!\vert \boldsymbol {\psi}_{h} \vert \!\vert \!\vert _{0}=(\boldsymbol {\psi}_{h},\Pi_{h}^{*}{\boldsymbol {\psi}}_{h})^{1/2}\), then there are two positive reals \(C_{1}\) and \(C_{2}\) that satisfy
Lemma 5
Gronwall’s inequality
When three sequences \(\{\alpha_{i}\}\), \(\{\beta_{i}\}\), and \(\{\mu_{i}\}\) are positive and \(\{\mu_{i}\}\) is monotone such that \(\alpha_{i}+\beta_{i}\leq\mu_{i}+\bar{\lambda}\sum_{j=0}^{i-1}\beta _{j}\) (\(\bar{\lambda}>0\)) and \(\alpha_{0}+\beta_{0}\leq\mu_{0}\), we have \(\alpha_{i}+\beta_{i}\leq\mu_{i}\exp(i\bar{\lambda})\) (\(i=0,1,2,\ldots \)).
Remark 2
For matrix functions, Lemma 4 is still correct.
The FVE solutions hold the following existence together with stability.
Theorem 6
Under the same conditions of Theorems 1 and 2, if there is a real \(\alpha>0\) that satisfies \(\Vert \nabla\boldsymbol {u}_{h}^{i-1} \Vert _{0,\infty}\le\alpha\) and \((1-2k\alpha)>0\) when k is small enough, then Problem IV has a unique set of solutions \(\{\boldsymbol {u}_{h}^{i},p_{h}^{i},\boldsymbol {\sigma}_{h}^{i} \}_{i=1}^{N}\) that satisfies the following stability:
Proof
Due to (24) being a linear equation, for the sake of proving that it has a unique set of solutions \(\{\boldsymbol {\sigma}_{h}^{i}\} _{i=1}^{N} \subset\mathcal{W}_{h}\), we just need to demonstrate that when \(\boldsymbol {\sigma}^{0}(\boldsymbol {z})=\boldsymbol {0}\), \(\boldsymbol {\sigma}_{h}^{i}=\boldsymbol {0}\) (\(1\le i\le N\)). Therefore, we only prove that (36) holds. For this purpose, by taking \(\boldsymbol {\chi}_{h}=\boldsymbol {\sigma}_{h}^{i}\) in (24), when \(\Vert \nabla\boldsymbol {u}_{h}^{i-1} \Vert _{0,\infty}\le\alpha\), using Lemma 3, the Hölder inequality together with the Cauchy-Schwarz inequality, we acquire
Thus, from \((1-2k\alpha)>0\), we obtain
Therefore, when \(\boldsymbol {\sigma}^{0}=\boldsymbol {0}\), (24) has only the zero solution. Thus, (24) has a sole set of solutions \(\{\boldsymbol {\sigma}_{h}^{i}\}_{i=1}^{N}\).
After \(\{\boldsymbol {\sigma}_{h}^{i}\}_{i=1}^{N}\) have been obtained by (24), (23) and (25) form the SFVE format for the time-dependent Navier-Stokes problems. Therefore, from the SFVE method of the time-dependent Navier-Stokes problems (see, e.g., [10, 11, 19]), we deduce that (23) and (25) have a unique set of solutions \(\{(\boldsymbol {u}_{h}^{i}, p_{n}^{i})\}_{i=1}^{N}\subset\mathcal{ H}_{h}\times\mathcal{ M}_{h}\) that satisfies (37). This accomplishes the argument of Theorem 6. □
Set
By using the SMFE methods of the 2D time-dependent Navier-Stokes problems (see, e.g., [7, 19, 20]), we obtain the following.
Lemma 7
Assume that \((S_{h}\boldsymbol {u}^{i}, Q_{h}{p}^{i})\in\mathcal{H}_{h}\times\mathcal{ M}_{h}\) is a Navier-Stokes projection for the solutions \((\boldsymbol {u}^{i}, {p}^{i})\) of Problem III, i.e., for all solutions \((\boldsymbol {u}^{i}, p^{i})\in\mathcal{H}\times\mathcal{M}\) of Problem III, there are \((S_{h}\boldsymbol {u}^{i}, Q_{h}{p}^{i})\) (\(1\le i\le N\)) satisfying
Then we have
When \(h=O(k)\) together with the solution \((\boldsymbol {u}^{i}, p^{i})\in H^{2}(\Theta )^{2}\times H^{1}(\Theta)\) (\(1\le i\le N\)) for Problem III, the error estimations hold
Remark 3
As a matter of fact, (41) together with (42) constitute a system of error equations between the SMFE format and the time semi-discretized format of the time-dependent Navier-Stokes problems. Therefore, (43) and (44) are directly acquired with the SMFE method (see, e.g., [7, 19, 20]).
With the standard FE method of the 2D elliptic equations (see, e.g., [13, 21]), we can obtain the following lemma.
Lemma 8
Assume that \(R_{h}: \mathcal{W}\to\mathcal{ W}_{h}\) denotes a generalized Ritz map, namely, for known \(\boldsymbol {u}_{h}^{i-1}\in\mathcal{H}_{h}\), \(\boldsymbol {\sigma}^{i-1}\in\mathcal{W}\), \(\boldsymbol {\sigma}_{h}^{i-1}\in \mathcal{ W}_{h}\), and \(\boldsymbol {\sigma}^{i}\in\mathcal{W}\) (\(i=1,2,\ldots,N\)), \(R_{h}\boldsymbol {\sigma}^{i}\in\mathcal{W}_{h}\) (\(i=1,2,\ldots,N\)) satisfy
Then, when \((\boldsymbol {u}^{i},p^{i},\boldsymbol {\sigma}^{i})\) (\(0\le i\le N\)) are the solutions to Problem III and \(\boldsymbol {\sigma}^{i}\in H^{2}(\Theta)\cap\mathcal{W}\), we have the following:
The convergence of the SFVE solutions of Problem IV is as follows.
Theorem 9
Under the same conditions of Theorems 2 and 6, if \((\boldsymbol {u}, p, \boldsymbol {\sigma})\) is the solution to Problem II, \(\{\boldsymbol {u}_{h}^{i},p_{h}^{i}, \boldsymbol {\sigma}_{h}^{i} \}\) is the set of solutions to Problem IV, \(p_{h}^{0}=p^{0}=0\) (or \(p_{h}^{0}=Q_{h}p^{0}\)), \(h=O(k)\), \(N_{0} \Vert \nabla{\boldsymbol {u}}_{h}^{i} \Vert _{0}\le1/4\), and \((\boldsymbol {u}^{0},\boldsymbol {\sigma}^{0})\in H^{1}(\Theta)^{2}\times H^{1}(\Theta)^{2\times2}\), then we achieve the error estimations
Proof
First, by Problem III subtracting Problem IV and taking \(\boldsymbol {\varphi}=\boldsymbol {\varphi}_{h}\), \(\vartheta=\vartheta_{h}\), and \(\boldsymbol {\chi}=\boldsymbol {\chi}_{h}\), and then using Lemmas 3 and 4, we acquire the following error system:
Set \(\xi^{i}=Q_{h}p^{i}-p_{h}^{i}\) and \(\boldsymbol {\mathcal{E}}^{i}=S_{h} {\boldsymbol {u}}^{i}- {\boldsymbol {u}}_{h}^{i}\). With (41), (49), and (50), we obtain
By Lemma 4, the Hölder and Cauchy-Schwarz inequalities, and Theorems 2 and 6, we have
When \(h=O(k)\), by Taylor’s formula, we acquire
Because \(\mathcal{B}(\vartheta_{h},S_{h}{\boldsymbol {u}}^{i}-{\boldsymbol {u}}^{i})=-k\delta (Q_{h}p^{i}-\rho_{h}(Q_{h}p^{i}),\vartheta_{h}-\rho_{h}\vartheta_{h})\), by the property of the map \(\pi_{h}\) and (51), we obtain
When \(N_{0} \Vert \nabla{\boldsymbol {u}}_{h}^{i} \Vert _{0}\le1/4\) (\(i=1, 2, \ldots, N\)), by (3), (8), and Lemma 4, we acquire
By combining (52) and (53)-(56), we acquire
When \(p_{h}^{0}=p^{0}=0\) (or \(p_{h}^{0}=Q_{h}p^{0}\)), by summing (57) from 1 to i, we acquire
By Gronwall’s Lemma 5, from (58), we acquire
Extracting the square root of (59) together with utilizing \(\sum_{i=0}^{i} \vert a_{i} \vert /\sqrt{n}\le (\sum_{i=0}^{i}a_{i}^{2} )^{1/2}\) and \(\Vert c \Vert _{0}- \Vert d \Vert _{0}\le \Vert c+d \Vert _{0}\), we acquire
When \(\xi^{i}\neq0\), we have \(\Vert \xi^{i} \Vert _{0}> \Vert \pi_{h}\xi^{i} \Vert _{0}\). Therefore, there is a real \(\omega \in(0,1)\) satisfying \(\omega \Vert \xi^{i} \Vert _{0}= \Vert \pi_{h}\xi^{i} \Vert _{0}\). Thus, using the triangular inequality, Lemma 7, and (60), we acquire
Set \(\boldsymbol {e}_{i}=R_{h}\boldsymbol {\sigma}^{i}- \boldsymbol {\sigma}_{h}^{i}\). By (51) and Lemma 8, we acquire
By Lemma 4 together with the Hölder and Cauchy-Schwarz inequalities, we acquire
When \(N_{0} \Vert \nabla{\boldsymbol {u}}_{h}^{i} \Vert _{0}\le1/4\) (\(i=1, 2, \ldots, N\)), by (4), Lemmas 3 and 4, and the Hölder and Cauchy-Schwarz inequalities, we acquire
When \(h=O(k)\), by combining (62) with (63)-(65), we acquire
If k becomes sufficiently small so as to ensure \(Ck\le1/2\) in (66), we acquire
By summing (67) from 1 to i and using Lemma 8, we gain
Further, we get
By the triangle inequality, (69), and Lemma 8, we acquire
By combining (61) with (70), we acquire
By combining (70) and (71) with Theorem 2, we achieve (48). When \(\xi^{i}=0\), (48) is valid, too. This accomplishes the argumentation of Theorem 9. □
Remark 4
It can be easily seen from Theorem 6 together with its argumentation procedure that, when \(\Vert \nabla u^{0} \Vert _{0}\) and \(\Vert \nabla\sigma^{0} \Vert _{0}\) are small enough, the conditions \(N_{0} \Vert \nabla{\boldsymbol {u}}_{h}^{i} \Vert _{0}\le 1/4\) (\(i=1, 2, \ldots, N\)) of Theorem 9 are tenable.
4 Some numerical experiments
Here, we adopt some numerical experiments to check the feasibility and effectiveness of the above SFVE format.
Let the computational domain \(\bar{\Theta} = \{(x,y): 0 \leq x \leq50, 30 \leq y \leq70 \}\cup \{(x,y): 50 \leq x \leq 100, 0\leq y \leq 100 \}\), \(\mathit{Re}=1\text{,}000\), and the initial and boundary values of the flow velocity \(\boldsymbol {u}^{0}=\boldsymbol {u}_{0}=(u_{x0},u_{y0})=(2(y-30)(70-y),0)\) on \(\{(x,y); x=0, 30\le y\le70\} \) and \(\boldsymbol {u}^{0}=\boldsymbol {u}_{0}=(u_{x0},u_{y0})\) that satisfies \(\partial u_{x0}/\partial x=p\mathit{Re}\) and \(u_{y0}=0\) on \(\{(x,y): x=100, 0\le y\le 100\}\), but \(\boldsymbol {u}^{0}=\boldsymbol {u}_{0}=(u_{x0},u_{y0})=(0,0)\) on other sides of Θ̄, while the initial and boundary values of the stress \(\boldsymbol {\sigma}=(\sigma_{lm})_{2\times2}\) satisfy that \(\sigma _{11}=\sigma_{22}=1\) and \(\sigma_{12}=\sigma_{21}=0\). Moreover, we divided \(\{(x,y): 0 \leq x \leq50, 30 \leq y \leq70 \}\) into \(5\text{,}000\times4\text{,}000=2\times10^{7}\) small squares of side size \(\triangle x =\triangle y= 0.01\) and divided \(\{(x,y): 50 \leq x \leq 100, 0 \leq y \leq 100 \}\) into \(5\text{,}000\times10\text{,}000=5\times10^{7}\) squares of side size \(\triangle x =\triangle y= 0.01\), too. And then, we linked the diagonal of each square to split it as two triangles along the identical direction, to constitute triangularizations \(\Im_{h}\) with \(h=\sqrt{2}\times 10^{-2}\). Finally, we adopted the barycenter control element \(\Im ^{*}_{h}\), whose nodes were the barycenter point for the element \(K\in\Im _{h}\). For the sake of ensuring \(h=O(k)\), we chose \(k =0.01\).
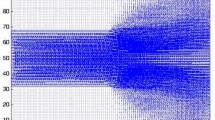
By solving the SFVE format on Microsoft Surface Book PC, we achieved the approximate solutions of u, p, \(\sigma_{11}\), \(\sigma _{12}\), \(\sigma_{21}\), and \(\sigma_{22}\) at moment \(t=10\) and painted them in Charts (a)’s of Figures 2 to 7, respectively. The SMFE solutions of u, p, \(\sigma_{11}\), \(\sigma_{12}\), \(\sigma_{21}\), and \(\sigma_{22}\) at moment \(t=10\) were obtained by solving the SMFE model in [7] on the same PC, and they are painted in Charts (b)’s of Figures 2 to 7, respectively. These charts showed that the SFVE solutions were more stable than the SMFE solutions due to the SFVE method maintaining local mass or other conservation laws.

The streamline of numerical solutions of the flow velocity u . Charts (a) and (b) are severally the SFVE and the SMFE solutions at moment \(t=10\).

The numerical solutions of the pressure p . Charts (a) and (b) are severally the SFVE and SMFE solutions at \(t=10\).

The numerical solutions of the stress component \(\pmb{\sigma_{11}}\) . Charts (a) and (b) are severally the SFVE and SMFE solutions at moment \(t=10\).

The numerical solutions of the stress component \(\pmb{\sigma_{12}}\) . Charts (a) and (b) are severally the SFVE and SMFE solutions at moment \(t=10\).

The numerical solutions of the stress component \(\pmb{\sigma_{21}}\) . Charts (a) and (b) are the SFVE and SMFE solutions at moment \(t=10\).

The numerical solutions of the stress component \(\pmb{\sigma_{22}}\) . Charts (a) and (b) are severally the SFVE and SMFE solutions at moment \(t=10\).
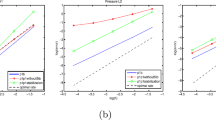
Charts (a)’s and (b)’s of Figures 8 and 9 severally showed the \(L^{2}\)-norm errors (log10) for the SFVE and SMFE numerical solutions of the flow velocity u, pressure p, and stress \(\boldsymbol {\sigma}=(\sigma_{lm})_{2\times2}\) on the time interval \([0, 10]\), which were estimated by \(\Vert r_{h}^{i}-r_{h}^{i-1} \Vert _{0}\) (\(r=\boldsymbol {u}\), p, or \(\boldsymbol {\sigma}_{ln}\), \(1\le i\le N\) and \(l,n=1,2\)) because \(\Vert r(t_{i})-r_{h}^{i} \Vert _{0}\le\sum_{j=1}^{i} \Vert r_{h}^{j}-r_{h}^{j-1} \Vert _{0}\) when \(r(t_{0})=r_{h}^{0}\). From developing tendencies of the error curves of Figures 8 and 9, we can easily see that the errors of SFVE solutions increased far slower than those of the SMFE solutions, which further showed that the SFVE method here was more stable than the SMFE format in [7]. This signifies that the SFVE method here is more effective than the SMFE model in [7] for solving the 2D nonlinear incompressible viscoelastic flow equation. The error curves for the SFVE solutions also expressed that these numerical simulating conclusions were in agreement with those theoretical ones because no error was greater than 10−4.

The \(\pmb{L^{2}}\) -norm error tendency of the numerical solutions of the flow velocity u and the pressure p . Charts (a) and (b) are severally the error of the SFVE and SMFE solutions on \(0\le t\le10\).

The \(\pmb{L^{2}}\) -norm error tendency of the numerical solutions of stress. Charts (a) and (b) are severally the errors of the SFVE solution and the SMFE solution on \(0\le t\le10\).
5 Conclusions
In this study, we have directly set up the SFVE format with a non-dimensional real together with two Gaussian quadratures by means of the time semi-discretized format of the 2D nonlinear incompressible viscoelastic flow equation. Therefore, we can not only bypass the semi-discretized SFVE technique with respect to the spatial variables, but can also remove the limitation of Brezzi-Babuška inequality so that the theoretical study here is more convenient than other existing methods used in the time-dependent Navier-Stokes problems (see, e.g., [9, 15, 16]). We have analyzed the existence and stability as well as convergence for the SFVE solutions and verified that the SFVE method is more superior than the SMFE method by comparing their numerical simulation results, too.
References
Zhao, AJ, Du, DP: Local well-posedness of lower regularity solutions for the incompressible viscoelastic fluid system. Sci. China Math. 53(6), 1520-1530 (2010)
Bird, RB, Armstrong, RC, Hassager, O: Dynamics of Polymeric Liquids, vol. 1, Fluid Mechanics. Wiley-Interscience, New York (1987)
de Gennes, PG, Prost, J: The Physics of Liquid Crystals. Oxford University Press, New York (1993)
Larson, RG: The Structure and Rheology of Complex Fluids. Oxford University Press, New York (1995)
Sideris, TC, Thomases, B: Global existence for 3D incompressible isotropic elastodynamics via the incompressible limit. Commun. Pure Appl. Math. 58, 750-788 (2005)
Lei, Z, Liu, C, Zhou, Y: Global solutions for the incompressible viscoelastic fluids. Arch. Ration. Mech. Anal. 188, 371-398 (2008)
Luo, ZD, Gao, JQ: Stabilized mixed finite element model for the 2D nonlinear incompressible viscoelastic fluid system. Bound. Value Probl. 2017, 56 (2017)
Li, J, Chen, Z: A new stabilized finite volume method for the stationary Stokes equations. Adv. Comput. Math. 30(2), 141-152 (2009)
He, GL, He, YN, Chen, ZX: A penalty finite volume method for the transient Navier-Stokes equations. Appl. Numer. Math. 58, 1583-1613 (2008)
Luo, ZD: A stabilized Crank-Nicolson finite volume element formulation for the non-stationary parabolized Navier-Stokes equations. Acta Math. Sci. 35B(5), 1055-1066 (2015)
Luo, ZD: A stabilized Crank-Nicolson mixed finite volume element formulation for the non-stationary incompressible Boussinesq equations. J. Sci. Comput. 66(2), 555-576 (2016)
Adams, RA: Sobolev Spaces. Academic Press, New York (1975)
Luo, ZD: Mixed Finite Element Methods and Applications. Chinese Science Press, Beijing (2006)
Luo, ZD: The mixed finite element method for the non stationary conduction-convection problems. Chin. J. Numer. Math. Appl. 20(2), 29-59 (1998)
He, YN: Two-level method based on finite element and Crank-Nicolson extrapolation for the time-dependent Navier-Stokes equations. SIAM J. Numer. Anal. 41(4), 1263-1285 (2003)
He, YN, Sun, WW: Stability and convergence of the Crank-Nicolson/Adams-Bashforth scheme for the time-dependent Navier-Stokes equations. SIAM J. Numer. Anal. 45(2), 837-869 (2007)
He, YN, Li, J: A stabilized finite element method based on local polynomial pressure projection for the stationary Navier-Stokes equations. Appl. Numer. Math. 58(10), 1503-1514 (2008)
Li, J, He, YN: A stabilized finite element method based on two local Gauss integrations for the Stokes equations. J. Comput. Appl. Math. 214(1), 58-65 (2008)
Luo, ZD, Li, H, Sun, P: A fully discrete stabilized mixed finite volume element formulation for the non-stationary conduction-convection problem. J. Math. Anal. Appl. 44(1), 71-85 (2013)
Luo, ZD: A stabilized mixed finite element formulation for the non-stationary incompressible Boussinesq equations. Acta Math. Sci. 36B(2), 385-393 (2016)
Li, RH, Chen, ZY, Wu, W: Generalized Difference Methods for Differential Equations-Numerical Analysis of Finite Volume Methods. Monographs and Textbooks in Pure and Applied Mathematics, vol. 226. Dekker, New York (2000)
Acknowledgements
This research was supported by the National Science Foundation of China grant 11671106 and the Fundamental Research Funds for the Central Universities grant 2016MS33.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally and significantly in writing this article. All authors wrote, read, and approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Xia, H., Luo, Z. Stabilized finite volume element method for the 2D nonlinear incompressible viscoelastic flow equation. Bound Value Probl 2017, 130 (2017). https://doi.org/10.1186/s13661-017-0862-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-017-0862-1