
Abstract
In this paper, we consider the Galerkin finite element method (FEM) for the Kelvin-Voigt viscoelastic fluid flow model with the lowest equal-order pairs. In order to overcome the restriction of the so-called inf-sup conditions, a pressure projection method based on the differences of two local Gauss integrations is introduced. Under some suitable assumptions on the initial data and forcing function, we firstly present some stability and convergence results of numerical solutions in spatial discrete scheme. By constructing the dual linearized Kelvin-Voigt model, stability and optimal error estimates of numerical solutions in various norms are established. Secondly, a fully discrete stabilized FEM is introduced, the backward Euler scheme is adopted to treat the time derivative terms, the implicit scheme is used to deal with the linear terms and semi-implicit scheme is applied to treat the nonlinear term, unconditional stability and convergence results are also presented. Finally, some numerical examples are presented to verify the developed theoretical analysis and show the performances of the considered numerical schemes.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
As an important component of the non-Newton fluids, the viscoelastic fluid flow model has been widely used in food products, molten plastic, biologic fluid, etc. In recent years, some important viscoelastic models have been researched not only from the viewpoint of theoretical analysis but also from the numerical simulations point. For example, we can refer to [1,2,3] and the reference therein. In this paper, we consider the following Kelvin-Voigt viscoelastic flow model
where Ω ∈ Rd(d = 2,3) be a bounded convex domain or the boundary ∂Ω ∈ C2, u and p are the fluid velocity and pressure, the positive parameters ν and κ are the kinematic coefficient viscosity and the retardation time or the time of relaxation of deformations, respectively, f is the prescribed body force, and u0 is the initial velocity.
The Kelvin-Voigt model was first introduced by Pavlovskii [4], which can be used to describe the motion of weakly concentrated water-polymer solution. It was named the Kelvin-Voigt viscoelastic fluid model by Oskolkov and his collaborators [5]. Later, the Kelvin-Voigt model as a smooth, inviscid regularization of the 2/3D Navier-Stokes equations has been proposed in [6]. For applications of the Kelvin-Voigt flow in organic polymer and food industry and in the mechanisms of diffuse axonal injury, etc., we can refer to [7] and the reference therein. Many numerical works have also been done for the Kelvin-Voigt model. For example, under the assumption of the exact solution is asymptotically stable, Oskolkov analyzed the convergence of the spectral Galerkin approximation in [8]. Pani and his coauthors in [9] shown that the optimal error estimation was consistent and effective in time under the assumption of uniqueness by applying a variant of the nonlinear semi-discrete spectral Galerkin method. Later, they considered the first- and second-order backward difference methods for the Kelvin-Voigt model and established the global discrete attractor and optimal error estimates by the Sobolev-Stokes projection and Stolz-Cesaro classical result on sequences in [10,11,12]. Bajpai and his coauthors considered the BDF schemes and two-grid Crank-Nicolson method for the Kelvin-Voigt viscoelastic fluid model in [13, 14]; stability and optimal error estimates were provided and numerical tests were also presented to verify the performances of the considered numerical methods.
When we solve the incompressible flow problem numerically, an important restriction is the compatibility between the discrete velocity and pressure spaces [15, 16]. However, many simple construction and computationally convenience mixed elements do not satisfy the inf-sup condition may also work well, especially the equal-order mixed elements, because these pairs have the same node distributions and basis functions on the same meshing. In order to overcome the restriction of the discrete inf-sup condition and make full use of the equal-order mixed elements, researchers developed several stabilized techniques, for example, the polynomial pressure projection method [17, 18], the macro-element method [19], and the local Gauss integrations stabilized method [20]. In this work, we consider the stabilized method for the Kelvin-Voigt model based on the lowest equal-order mixed elements. The difference between two local Gauss integrations is used to bypass the inf-sup condition due to this method has some attractive features, such as parameter-free, no higher-order derivatives, and non-edge-based data structures.
The main contributions of this paper can be listed as follows:
-
(I)
Compared with [10,11,12,13,14], some different theoretical analysis tools are adopted to avoid using the Sobolev-Stokes projection and Stolz-Cesaro’s classical result on sequences.
-
(II)
Compared with [19], optimal error estimates for velocity in \(L^{\infty }(L^{2})\)-norm are established by constructing the dual problem and using the negative norm estimate technique.
-
(III)
Compared with [20, 21], the unconditional stability and optimal convergence results of velocity in various norms are provided for all t ≥ 0.
The outline of this paper is organized as follows. Section 2 introduces the Sobolev spaces, the stabilized FEM, and some preliminary results. Stability and convergence results of stabilized FEM are presented in Sections 3 and 4 by the energy method and L’Hospital rule. Section 5 devotes to the optimal \(L^{\infty }(L^{2})\)-norm error estimates of velocity by constructing dual problem and using the negative norm technique. Section 6 presents the fully discrete stabilized FEM and establishes the error estimates of the fully discrete numerical approximations in various norms. Finally, some numerical results are presented to verify the established theoretical analysis and show the performances of the considered stabilized method.
2 Preliminaries
For the mathematical setting of problem (1), standard Sobolev spaces are used. Denote Hi(Ω) the function with square integrable distribution derivatives up to order i over the domain Ω, \({H^{1}_{0}}({\Omega })\) is the closed subspace of H1(Ω) consisting of the functions with zero trace on Ω. We equip the spaces Hi(Ω)(i = 1,2) with the norm ∥⋅∥i, Li(Ω) with the norm ∥⋅∥0 and inner product (⋅,⋅), \({H^{1}_{0}}({\Omega })\) with the scalar product ((u,v)) = (∇u.∇v) and norm ∥u∥1 = ((u,u))1/2. Set
and denote the Stokes operator by \(\bar {A}=-P{\Delta }\), P is L2-orthogonal projection of Y onto H.
Some assumptions about the prescribed data for problem (1) are needed (see [13, 14, 22]).
(A1). The initial velocity u0 ∈ H2(Ω)d ∩ V and the body force f satisfy
The continuous bilinear forms a(⋅,⋅) on X × X and d(⋅,⋅) on X × M are defined by
Define the trilinear form b(⋅,⋅,⋅) on X × X × X with \(B(u,v)=(u\cdot \nabla )v+\frac {1}{2}(\nabla \cdot u)v\) by
The following properties of trilinear term can be found in [16, 19]
for all u,v,w ∈ X and
for all u ∈ X, v ∈ D(A), w ∈ Y.
With above notations, the variational formulation of problem (1) reads as: find (u,p) ∈ X × M, for all (v,q) ∈ X × M such that
where
The following results are valid for small κ in 2D and for 3D with data small.
Theorem 2.1
(see [9, 22, 23]) Under the assumption (A1), there exists a positive constant c = c(ν,δ0,Ω,λ1) such that for \(0<\delta _{0}<\min \limits \{\frac {\nu \lambda _{1}}{2(1+\lambda _{1}\kappa )},\frac {\nu }{2\kappa }\}\), for all t ≥ 0, problem (1) admits a unique solution (u,p) and satisfies
where \(\lambda _{1}^{-1}>0\) satisfies \(\|v\|_{0}^{2}\leq \lambda _{1}^{-1}\|\nabla v\|_{0}^{2}\), it is the best possible constant depending on Ω.
Lemma 2.2
Under the assumptions of Theorem 2.1, for all t ≥ 0 it holds
with \(\tau (t)=\min \limits \{t,1\}\).
Proof
Differentiating (5) with respect to t, one finds that
Taking \(v=-\bar {A}u_{tt}\in V\) in (6), it yields
Thanks to (2), (3), and the Cauchy inequality, we have
Combining above inequalities with (7) and dropping some unnecessary terms, multiplying by \(e^{\delta _{0}t}\tau (t)\), noting the fact \(\tau (t)\leq 1,\frac {d\tau (t)}{dt}\leq 1\), integrating from t = 0 to t, one finds
Multiplying (8) by \(e^{-\delta _{0}t}\), using Theorem 2.1 and the L’Hospital rule, we finish the proof.
From now on, h is a real positive parameter tending to 0, we let \(\mathcal {T}_{h}\) be a uniformly regular mesh of \(\bar {\Omega }\) made of n-simplices K with mesh size h (see [15, 24]). Based on \(\mathcal {T}_{h}\), we introduce the finite-dimensional subspaces (Xh,Mh) ⊂ X × M. This paper focuses on the analysis for the unstable velocity-pressure pair of the lowest equal-order elements:
where R1(K) = P1(K) if K is triangular and R1(K) = Q1(K) if K is quadrilateral.
It is well known that the lowest equal-order elements do not satisfy the discrete inf-sup condition, so we use the stabilized method to overcome this restriction and set \({\Pi }_{h}:M\rightarrow R_{0}=\{q_{h}\in M:q_{h}|_{K}\) is a constant,\(\forall K\in \mathcal {T}_{h}\}\) be a L2-projection and satisfy (see [20, 25]):
Define the stabilized term based on the differences of two local Gauss integrations (see[17, 20])
With above notations, the stabilized finite element variational formulation of problem (5) reads as: Find (uh,ph) ∈ Xh × Mh, for all (vh,qh) ∈ Xh × Mh and t > 0, it holds
where
is the discrete generalized bilinear form.
Now, we present some assumptions about the spaces Xh and Mh: There exist operators πh and ρh such that (see [17, 20, 25])
Define the discrete Stokes operator Ah = −PhΔh by
where the L2-orthogonal projection operators \(P_{h} : Y\rightarrow X_{h}\) and \(\rho _{h}: M\rightarrow M_{h}\) are defined by
The discrete norm \(\|v_{h}\|_{\alpha }=\|A_{h}^{\alpha /2}v_{h}\|_{0}\) with α-order can be defined, where
Denote the subspaces Vh of Xh by
The following theorem establishes the continuity and coercivity for \({\mathscr{B}}_{h}((\cdot ,\cdot ); (\cdot ,\cdot ))\). □
Theorem 2.3
(see[20, 25]) There exists a constant β > 0, independent of h, such that
3 Unconditional stability of spatial discrete numerical solutions
In this section, we establish some stability results of numerical solutions uh and ph. Firstly, for all (u,p) ∈ X × M and (vh,qh) ∈ Xh × Mh, we define the Galerkin projection \((R_{h},Q_{h}):X\times M\rightarrow X_{h}\times M_{h}\) by
which is well defined and for all (u,p) ∈ D(A) × H1(Ω) ∩ M, it holds (see [19, 20])
Due to u0 ∈ D(A), one gets p0 ∈ H1(Ω) ∩ M. Defining (u0h,p0h) = (Rh(u0,p0),Qh(u0,p0)), setting wh = u − Rh(u,p) and rh = p − Qh(u,p), with Theorem 2.1 and (15)–(16), we have
Lemma 3.1
(see [19, 20]) Under the assumptions of Theorem 2.1 and the following uniqueness condition
where \(\|f_{\infty }\|_{-1}=\sup \limits _{v\in X}\frac {|(f_{\infty },v)|}{\|v\|_{1}}\), for all t ≥ 0, it holds
Theorem 3.2
Under the assumptions of Theorem 2.1, for all t ≥ 0, it holds
Proof
Taking (vh,qh) = (uh,ph) in (12), using (2) and the Cauchy inequality, we get
Multiplying (21) by \(e^{\delta _{0}t}\), noting the fact \(\nu \|u_{h}\|_{1}^{2}\geq \nu \lambda _{1}\|u_{h}\|_{0}^{2}\geq 2\delta _{0}\|u_{h}\|_{0}^{2}\) and the assumption (A1), integrating with respect to time from 0 to t, we obtain (18) after a multiplication by \(e^{-\delta _{0}t}\).
Then, taking vh = Ahuh ∈ Vh,qh = 0 and using the similar proof of (18), we get (19).
Furthermore, choosing (vh,qh) = (uh,ph) in (12) and multiplying \(e^{\delta _{0}t}\), one finds
Integrating above inequality from 0 to t and multiplying by \(e^{-\delta _{0}t}\), we have
Letting \(t\rightarrow \infty \) in above inequality, using the L’Hospital rule and noting the fact that
Then, we deduce the desired result (20). □
Theorem 3.3
Under the assumptions of Theorem 2.1, for all t ≥ 0, uht satisfies
Proof
Taking vh = Ahuht ∈ Vh,qh = 0 in (12), using (3), the Cauchy inequality, multiplying by \(e^{\delta _{0}t}\), integrating with respect to time from 0 to t, we finish the proof by multiplying \(e^{-\delta _{0}t}\) and using Theorem 3.2. □
Theorem 3.4
Under the assumptions of Theorem 2.1, for all t ≥ 0, it holds
Proof
Differentiating the terms d(uh,qh) + G(ph,qh) in (12) with respect to the time, taking (vh,qh) = (uht,ph), we get
Thanks to (2)–(3) and the inverse inequality, we obtain
Combining above estimates with (25) and multiplying by \(e^{\delta _{0}t}\), we arrive at
Integrating (26) with respect to time from 0 to t, by Theorems 2.1 and 3.2, one finds
where
From the definition of (u0h,p0h), we have \(\nu \|u_{0h}\|_{1}^{2}+G(p_{0h},p_{0h})\leq c\|u_{0}\|_{1}^{2}+c\|p_{0}\|_{0}^{2}\), then it holds
Subtracting (12) from (5) with (v,q) = (vh,qh), using the projection (Rh,Qh), for all (vh,qh) ∈ Xh × Mh, we get
with eh = Rh(u,p) − uh, μh = Qh(u,p) − ph and u − uh = wh + eh.
With (vh,qh) = (eh,μh), we can rewrite (28) as
Thanks to (2), it is valid that
Combining above estimates with (28), multiplying by \(e^{\delta _{0}t}\) and using Theorem 2.1, we obtain
Integrating (30) with respect to time from 0 to t, using Theorem 2.1 and Lemma 3.1, after a final multiplication by \(e^{-\delta _{0}t}\), we have
Letting \(t\rightarrow \infty \) in (31), using the L’Hopital rule and Lemma 3.2, one gets
Considering the uniqueness condition (17), we obtain
Combining (27) with (33) and Theorem 3.3, using the L’Hopital rule, we find
As a consequence, using the fact ∥u∥0 ≤ c∥u∥1, we have
Combining (31) with (35), using Theorem 3.2, we get (23) after a multiplication by \(e^{-\delta _{0}t}\). □
Theorem 3.5
Under the assumptions of Theorem 3.4, for all t ≥ 0, it holds
Proof
Differentiating (12) with respect to t, taking (vh,qh) = (uht,pht), using (3), the Cauchy inequality, integrating with respect to the time from 0 to t, multiplying by \(e^{-\delta _{0}t}\) and using Theorems 3.2 and 3.3, we complete the proof. □
Theorem 3.6
. Under the assumptions of Theorem 3.4, for all t ≥ 0, it holds
Proof
Differentiating (12) with respect to t, then differentiating d(uht,qh) + G(pht,pht) with respect to time again, taking (vh,qh) = (uhtt,pht), thanks to (2)–(4), the Cauchy inequality, integrating with respect to time from 0 to t, multiplying by \(e^{-\delta _{0}t}\), applying Theorems 3.3, 3.4, and 3.5, we finish the proof. □
Theorem 3.7
Under the assumptions of Theorem 3.4, for all t ≥ 0, it holds
Proof
Following the proof of Lemma 2.2, we derive the desired results. □
4 Error estimates of spatial discrete numerical approximations
This section is devoted to present the error estimates of the numerical solutions uh and ph in various norms. The main results of this section are the following theorem.
Theorem 4.1
Under the assumptions of Theorem 3.4, for all t ≥ 0, it holds
Proof
The proof of the Theorem 4.1 consists of Lemmas 4.2, 4.3, and 4.4. □
Lemma 4.2
. Under the assumptions of Theorem 3.4, for t ≥ 0, it holds
Proof
Differentiating the terms d(eh,q) + G(μh,qh) with respect to time t in (28) and taking (vh,qh) = (eht,μh), one deduces that
Thanks to (2)–(4) and the inverse inequality, we have
Combining above estimates with (38), we obtain
Multiplying with \(e^{\delta _{0}t}\), integrating with respect to the time from 0 to t and noting the fact
then one finds by applying Lemma 3.1, Theorems 2.1, 3.4 and multiplying by \(e^{-\delta _{0}t}\)
Thanks to Theorems 2.1, 3.3, and 3.4, we finish the proof of Lemma 4.2. □
Lemma 4.3
Under the assumptions of Theorem 3.4, for t ≥ 0, it holds
Proof
Differentiating (28) with respect to t, taking (vh,qh) = (eht,μht), using (3)–(4), the Cauchy inequality, multiplying by \(e^{\delta _{0}t}\tau (t)\), integrating with respect to t, applying Theorems 2.1, 3.4 and Lemmas 3.1, 4.2, we have by multiplying \(e^{-\delta _{0}t}\)
Thanks to Lemma 2.2, the triangle inequality, Theorem 3.6, and the fact \(e^{-\delta _{0}t}{{\int \limits }_{0}^{t}}e^{\delta _{0}s}\|w_{ht}\|_{1}^{2}ds\leq ch^{2}\), we deduce that
Combining above inequality with Theorem 3.2 and Lemma 4.2, we complete the proof. □
Lemma 4.4
Under the assumptions of Theorem 3.4, for all t ≥ 0, it holds
Proof
The inf-sup condition (15) and (28) guarantee that
Combining above estimate with Lemma 3.1 and the triangle inequality, one finds
We finish the proof by combining (41), Theorem 3.2, Lemmas 4.2 and 4.3. □
5 Optimal L 2-norm error estimates of velocity in spatial discrete scheme
This section is devoted to establish the optimal L2-norm error estimates of numerical solution uh in stabilized finite element method (12).
Theorem 5.1
Under the assumptions of Theorem 3.4, for all t ≥ 0, it holds
Proof
The proof of Theorem 5.1 consists of Theorems 2.1, 3.2, 4.1 and Lemma 5.5.
In order to get the convergence of e(t) = u − uh in L2-norm, we begin with a technical result concerning a linear Kelvin-Voigt problem, we can refer to this technique from Heywood & Rannacher [26] and Hill & Süli [27] for the linear Navier-Stokes equations.
For any given s > 0 and \(g=e^{\delta _{0}t}e(t)\in L^{2}(0,s;L^{2}({\Omega })^{2})\), consider the following problem: Find (Φ,Ψ) ∈ X × M such that for 0 < t < s
for all (v,q) ∈ X × M with Φ(s) = 0.
Since u0 ∈ V and f,ft ∈ L2(R+,Y ), Theorem 2.1 ensures that u is sufficiently smooth so that (Φ,Ψ) is correctly defined for all 0 < t ≤ s. Thus for every σ ∈ (0,s), (42) is a well-posed problem and has a unique solution (Φ,Ψ) with
This following result can be obtained by the similar methods used by [27, 28]. □
Lemma 5.2
Let (Φ,Ψ) be the solution of problem (42) with \(g=e^{\delta _{0}t}e(t)\), it holds
Lemma 5.3
Under the assumptions of Theorem 3.4, the error u − uh satisfies
Proof
Given \(g=e^{\delta _{0}t}e(t)\in L^{2}(0,s;Y)\), let (Φ,Ψ) ∈ X × M be the solution of problem (42). Taking (v,q) = (e(t),p − ph) in (42), we have
For all 0 < t < s, we consider the dual Galerkin projection (Φh,Ψh) ∈ Xh × Mh
By a similar approach to the proof of Lemma 3.1, we get
Let us recall the error identity (28) with (vh,qh) = (Φh,Ψh), we have
Adding (46) to (43) and using the relationship (44) with (vh,qh) = (eh,μh), where eh = Rh(u,p) − uh, μh = Qh(u,p) − ph and u − uh = wh + eh, one finds
By (2), (11), (13), (14), (16), and (45), we deduce that
Integrating (48) about t from 0 to s, using Theorems 2.1, 3.2, 3.3 and Lemma 3.1, we have
Furthermore, we have
Combining Lemma 5.2 with (49)–(51), we finish the proof. □
Lemma 5.4
Under the assumptions of Theorem 3.4, the error e(t) = u − uh satisfies
Proof
Recalling the error equality (28) with \(v_{h}=A_{h}^{-1}e_{h}\in V_{h},q_{h}=0\) and noting the fact that \((u_{t}-u_{ht},A_{h}^{-1}e_{h})=(e_{ht},A_{h}^{-1}e_{h})+(w_{ht},A_{h}^{-1}(u-u_{h}-w_{h}))\), we obtain
Thanks to the inverse inequality, (2), and Theorem 2.1, we have
Combining above estimates with (52), multiplying with \(e^{\delta _{0}t}\), integrating for t from 0 to t, using the triangle inequality and Lemma 3.1, we obtain
Multiplying (53) by \(e^{-\delta _{0}t}\), we complete the proof of Lemma 5.4. □
Lemma 5.5
Under the assumptions of Theorem 3.4, for all t ≥ 0, it holds
Proof
Choosing \(v_{h}=A_{h}^{-1}e_{h}\in V_{h},q_{h}=0\) in (28) and using (2), one derives that
For the trilinear terms of (55), using (2)–(4), we arrive at
Combining above estimates with (55), integrating for t from 0 to s, using Theorem 2.1 and Lemmas 3.1, 4.2, 5.3, and 5.4, after multiplying by \(e^{-\delta _{0}s}\), we have
Setting
Letting \(s\rightarrow \infty \) in (56), applying the L’Hospital Rule, Lemma 4.2, and (17), one finds
Taking vh = A− 1eht ∈ Vh,qh = 0 in (28), one deduces that
Thanks to (3)–(4), the inverse inequality, and Theorems 2.1 and 4.1, we have
Combining above estimates with (58), multiplying by \(e^{\delta _{0}t}\), integrating from 0 to s, applying Theorem 2.1 and Lemma 3.1, we have by a final multiplication \(e^{-\delta _{0}s}\),
Due to (2), Theorem 2.1, and Lemma 3.1, we know that for all s > 0
Combining above estimate with (59), we arrive at
Setting \(s\rightarrow \infty \) in (60) and using the L’Hospital rule, it holds that
Using (57) with (61) that Z ≤ ch4. Furthermore, by Lemma 3.1, we have
Then, we finish the proof. □
6 Fully discrete stabilized finite element method
In this section, we take the time step Δt and denote the discrete times tn = nΔt, n = 0,1,⋯. Then, the fully discrete stabilized FEM for the Kelvin-Voigt problem (5) reads as: For all n ≥ 1, find \(({u_{h}^{n}},{p_{h}^{n}})\in X_{h}\times M_{h}\) such that
for all (vh,qh) ∈ Xh × Mh with \({u_{h}^{0}}=u_{0h}\), where \(d_{t}{u_{h}^{n}}=\frac {1}{\Delta t}({u_{h}^{n}}-u_{h}^{n-1}),\ \ f^{n}=f(t_{n})\).
Based on Theorem 2.3 and the classical Lax-Milgram theorem, we know that problem (62) admits a unique solution. By choosing different test functions \((v_{h},q_{h})=({u_{h}^{n}},{p_{h}^{n}})\) and \(v_{h}=A_{h}{u_{h}^{n}}\in V_{h},q_{h}=0\) in (62) with energy method, we can establish the following stability results of numerical solutions. Here we omit these proof due to the standard process.
Theorem 6.1
Under the assumptions of Theorem 3.4, there exists a positive constant c = c(ν,Ω,λ1) such that for all m ≥ 1, it holds
In order to analyze the discretization errors \({e_{h}^{n}}=u_{h}(t_{n})-{u_{h}^{n}}\) and \({\mu _{h}^{n}}=p_{h}(t_{n})-{p_{h}^{n}}\), for all (vh,qh) ∈ Xh × Mh, we discrete (12) at n th time level, it holds
with
Subtracting (62) from (63), we obtain with \(({e_{h}^{0}},{\mu _{h}^{0}})=(0,0)\)
Lemma 6.2
Under the assumptions of Theorem 6.1, it holds
Proof
Taking \((v_{h},q_{h})=({e_{h}^{n}},{\mu _{h}^{n}})\) in (65) and using (2), we have
For the trilinear terms and the right-hand side term, by (3) and Theorem 3.2, one finds
Combining above estimate with (66), summing from n = 1 to m, applying the Gronwall Lemma and Theorem 3.7, we complete the proof. □
Lemma 6.3
Under the assumptions of Theorem 6.1, for all m ≥ 1, we have
Proof
Taking \(v_{h}=d_{t}{e_{h}^{n}}{\Delta } t\in V_{h},q_{h}=0\) in (65), one finds
For the trilinear terms and the right-hand side term, by (3) and Cauchy inequality, it holds
Combining above estimate with (67), summing from n = 1 to m, applying Gronwall Lemma and Theorem 3.7, we finish the proof. □
Theorem 6.4
Under the assumptions of Theorem 6.1, for all m ≥ 1, the errors \(u(t_{n})-{u_{h}^{n}}\) and \(p(t_{n})-{p_{h}^{n}}\) satisfy
Proof
Thanks to the triangle inequality, Theorem 5.1, and Lemmas 6.2 and 6.3, we finish the proof of (68).
For (69), by using (2)–(4) and Theorem 2.3, one finds
Squaring above inequality, summing from n = 0 to m, multiplying Δt and combing Theorem 5.1 with Lemma 6.3, we complete the proof of (69). □
Remark 6.1
In Theorem 6.4, we obtain the optimal error estimates of velocity in L2 and H1-norms. The spatial convergence order for pressure in L2 norm is \(\mathcal {O}(h)\), which is optimal, but the time convergence order for pressure in L2 norm is one order weakly. The reason is that we need a such estimate \(\|d_{t}{e_{h}^{n}}\|_{0}+\kappa \|d_{t}{e_{h}^{n}}\|_{1}\leq C{\Delta } t\). We can obtain this result by taking the differences of (65) at n and n − 1 time level and choosing \(v_{h}=d_{t}{e_{h}^{n}}\in V_{h},q_{h}=0\). Here we omit this proof due to the limitation of pages and just verify from the point of numerical results.
Remark 6.2
In our results, we did not distinguish κ− 1 from the constant c, how to establish the stability and convergence uniformly as κ↦0 is a meaningful topic, we can refer to [11, 12, 23]. In these literature, authors developed their novel stability and convergence analysis and avoided using the constant in a priori bound and a priori error estimates which depends on κ− 1 with some suitable weight functions, as a consequence, the estimates are valid uniformly as κ goes to zero. How to combine our results with the techniques provided in [11, 12, 23] to obtain the desired results will be our next work.
7 Numerical experiments
In this section, we present some numerical results to verify the performances of the stabilized FEM for the Kelvin-Voigt viscoelastic fluid model with different parameters. The partition of domain Ω uses the triangle mesh with the different mixed elements for the velocity and pressure. The mesh is obtained by dividing Ω into squares and then drawing a diagonal in each square. The Euler backward scheme is adopted to treat the time derivative term.
7.1 An analytical solution: convergence validation
In this test, we consider the domain Ω = [0,1]2, T = 1.0 and present some numerical results with the following analytical solutions for the velocity u = (u1,u2) and pressure p
In order to show the performances of the developed stabilized FEM with the lowest equal-order elements, the standard Galerkin method is also introduced with stable mixed elements, such as the MINI element (refer to Arnold et al. [29] and Gerbeau [30]). Let \(\hat {b}\in {H_{0}^{1}}(K)^{2}\) take the value 1 at the barycenter of K and satisfy that \(0\leq \hat {b}\leq 1\), which is called a “bubble function,” we define
The P2-P1 element (refer to Boffi et al. [31]).
The P2-P0 element (refer to Boffi et al. [31] and Girault [15] )
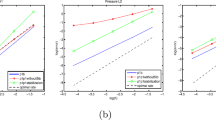
Firstly, we set ν = 1 and present the computational results of stabilized FEM with P1-P1 element for the Kelvin-Voigt model (62) with different κ. From Tables 1, 2, 3, and 4, we can see that the convergence orders of velocity in L2- and H1-norms are 2 and 1, which confirm the provided theoretical analysis results of Theorem 6.4 well. The convergence order of pressure in L2-norm is about 1.5, which show some superconvergence, that maybe due to the smoothness of the analytical solutions. Compared with the standard Galerkin method with MINI element, we can see that as κ decreases, the differences of the relative errors between the stabilized FEM with P1-P1 element and the Galerkin method with MINI element become smaller and smaller. However, 23% the CPU time of stabilized method with different κ is saved than the standard Galerkin method’s.
Next, we fix the parameter κ = 1 and present the relative errors of different numerical schemes with different mixed elements. From Tables 5 and 6, we see that the L2-relative errors for the velocity and pressure in Galerkin method are \(\frac {1}{2}\) and \(\frac {1}{5}\) times than that obtained by the stabilized FEM with ν = 0.001, while the computational time of stabilized method can save \(\frac {1}{3}\) than that obtained by the Galerkin method.
Finally, we present the computational results of Galerkin method with stable P2-P1 and P2-P0 elements in Tables 7 and 8. From these data, we can see that more accurate computational results are obtained with the stable higher mixed elements at the cost of high CPU overhead. For the data of Table 7, the desired convergence orders for velocity in L2-norm and H1-norm and pressure in L2-norm should be 3,2,2, respectively. However, the computational results far from ideal, the reason may lie in that (1) the accumulation errors of computer destroys the accuracy of computational results, (2) the truncation errors of Euler scheme take the dominant position.
7.2 Lid-driven cavity problem
In this test, we consider the incompressible lid-driven cavity flow problem defined on the unit square. Setting f = 0 and the boundary condition u = 0 on [{0}× (0,1)] ∪ [(0,1) ×{0}] ∪ [{1}× (0,1)] and u = (1,0)T on (0,1) ×{1} (see Fig. 1). The mesh consists of triangular element and the mesh size \(h=\frac {1}{40}\), the final time T = 10 and the time step Δt = 0.01.

Lid-driven cavity flow
Figures 2, 3, 4, and 5 show the velocity vectors and pressure contours of driven cavity flow with different ν and κ. From these figures, we can see that the velocity vectors and pressure contours are almost the same with ν = 1 and show great differences with \(\nu =\frac {1}{400}\) with different κ, which show that our stabilized method has an effect to stabilize flow field. This also means the time derivatives of diffusion term has little influence on the numerical solutions with large ν.

The pressure lines and velocity vectors of driven cavity flow with ν = 1,κ = 10

The pressure lines and velocity vectors of driven cavity flow with ν = 1,κ = 0

The pressure lines and velocity vectors of driven cavity flow with ν = 0.0025,κ = 10

The pressure lines and velocity vectors of driven cavity flow with ν = 0.0025,κ = 0
Furthermore, as the parameter κ decreases, the Kelvin-Voigt model tends to the Navier-Stokes equations. Figure 6 presents the data of numerical velocity obtained by stabilized FEM for the Kelvin-Voigt model at y = 0.5 and x = 0.5, respectively. Compared with the results given in [32], we can see that the velocity vectors and pressure contours are close to the lid-driven cavity problem of Navier-Stokes as κ decreases. For large κ, the time derivatives of diffusion term plays an important role in stabilizing the flow field with small viscosity parameter ν.

The computed velocity profiles through the geometric center at \(\nu =\frac {1}{400}\) with different κ
References
Pani, A.K., Yuan, J.Y.: Semidiscrete finite element Galerkin approximations to the equations of motion arising in the oldroyd model. IMA J. Numer. Anal. 25, 750–782 (2005)
Pani, A.K., Yuan, J.Y., Damazio, P.: On a linearized backward Euler method for the equations of motion of oldroyd fluids of order one. SIAM J. Numer. Anal. 44, 804–825 (2006)
Zhang, T., Yuan, J.Y.: A stabilized characteristic finite element method for the viscoelastic oldroyd fluid motion problem. Int. J. Numer. Anal. Model. 12, 617–635 (2015)
Pavlovskii, V.A.: To the question of theoretical description of weak aqueous polymer solutions. Soviet physics-Doklady 200, 809–812 (1971)
Oskolkov, A.P.: The uniqueness and global solvability of boundary-value problems for the equations of motion for aqueous solutions of polymers. Journal of Soviet Mathematics 8(4), 427–455 (1977)
Cao, Y., Lunasin, E., Titi, E.S.: Global wellposedness of the three dimensional viscous and inviscid simplified Bardina turbulence models. Commun. Math. Sci. 4, 823–848 (2006)
Cotter, C.S., Smolarkiewicz, P.K., Szezyrba, I.N.: A viscoelastic model from brain injuries. Int. J. Numer. Methods Fluids 40, 303–311 (2002)
Oskolkov, A.P.: On an estimate, uniform on the semiaxis t ≥ 0, for the rate of convergence of Galerkin approximations for the equations of motion of Kelvin-Voight fluids. Journal of Soviet Mathematics 62, 2802–2806 (1992)
Pani, A.K., Pany, A.K., Damazio, P., Yuan, J.Y.: A modified nonlinear spectral Galerkin method for the equations of motion arising in the Kelvin-Voigt fluids. Appl. Anal. 93, 1587–1610 (2014)
Bajpai, S., Nataraj, N., Pani, A.K.: On fully discrete finite element schemes for equations of motion of Kelvin-Voigt fluids. Int. J. Numer. Anal. Model. 10, 481–507 (2013)
Pany, A.K.: Fully discrete second-order backward difference method for Kelvin-Voigt fluid flow model. Numerical Algorithms 78, 1061–1086 (2018)
Pany, A.K., Paikray, A.K., Padhy, S., Pani, A.K.: Backward Euler schemes for the Kelvin-Voigt viscoelastic fluid flow model. Int. J. Numer. Anal. Model. 14, 126–151 (2017)
Bajpai, S., Nataraj, N.: On a two-grid finite element scheme combined with Crank-Nicolson method for the equations of motion arising in the Kelvin-Voigt model. Computer & Mathematics with Applications 68, 2277–2291 (2014)
Bajpai, S., Nataraj, N., Pani, A.K.: On a two-grid finite element scheme for the equations of motion arising in Kelvin-Voigt model. Adv. Comput. Math. 40, 1043–1071 (2014)
Giraut, V., Raviart, P.: Finite element approximation of the Navier-Stokes equations. Springer, Berlin (1979)
Temam, R.: Navier-Stokes equations, theory and numerical analysis. North-Holland Pub. Co, Amsterdam (1984)
Bochev, P., Dohrmann, C., Gunzburger, M.: Stabilization of low-order mixed finite elements for the Stokes equations. SIAM J. Numer. Anal. 44, 82–101 (2006)
Dohrmann, C., Bochev, P.: A stabilized finite element method for the Stokes problem based on polynomial pressure projections. Int. J. Numer. Methods Fluids 46, 183–201 (2004)
He, Y.N., Lin, Y.P., Sun, W.W.: Stabilized finite element method for the non-stationary Navier-Stokes problem. Discrete and Continuous Dynamical Systems-B 6, 41–68 (2006)
Li, J., He, Y.N., Chen, Z.X.: A new stabilized finite element method for the transient Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 197, 22–35 (2007)
Huang, P.Z., Feng, X.L., Liu, D.M.: A stabilized finite element method for the time-dependent Stokes equations based on Crank-Nicolson scheme. Appl. Math. Model. 37, 1910–1919 (2013)
Bajpai, S., Nataraj, N., Pani, A.K., Damazio, P., Yuan, J.Y.: Semidiscrete Galerkin method for equations of motion arising in Kelvin-Voigt model of viscoelastic fluid flow. Numerical Methods for Partial Differential Equations 29, 857–883 (2013)
Pany, A.K., Bajpai, S., Pani, A.K.: Optimal error estimates for semidiscrete Galerkin approximations to equations of motion described by Kelvin-Voigt viscoelastic fluid flow model. J. Comput. Appl. Math. 302, 234–257 (2016)
Ciarlet, P.: The Finite Element Method for Elliptic Problems. SIAM Publications, North-Holland, Amsterdam (2002)
Feng, X.L., He, Y.N., Huang, P.Z.: A stabilized implicit fractional-step method for the time-dependent Navier-Stokes equations using equal-order pairs. J. Math. Anal. Appl. 392, 209–224 (2012)
Heywood, J.G., Rannacher, R.: Finite element approximation of the nonstationary Navier-Stokes problem. I. Regularity of solutions and second-order error estimates for spatial discretization. SIAM J. Numer. Anal. 19, 275–311 (1982)
Hill, A.T., Süli, E.: Approximation of the global attractor for the incompressible Navier-Stokes problem. IMA J. Numer. Anal. 20, 633–667 (2000)
He, Y.N.: A fully discrete stabilized finite-element method for the time-dependent Navier-Stokes problem. IMA J. Numer. Anal. 23, 665–691 (2003)
Arnold, D.N., Brezzi, F., FortinLi, M.: A stable finite element for the Stokes equations. Calcolo 21, 337–344 (1984)
Gerbeau, J.F., Bris, C., Lelievre, T.: Mathematical Method for the Magnetohydrodynamics of Liquid Metals. Oxford University Press, Oxford (2006)
Boffi, D., Brezzi, F., Fortin, M.: Mixed Finite Element Methods and Applications. Springer, Heidelberg, New York, Dordrecht, London (2010)
Ghia, U., Ghia, K.N., Shin, C.T.: High-resolutions for incompressible flow using the Navier-Stokes equations and a multigrid method. J. Comput. Phys. 48, 387–411 (1982)
Funding
This work was supported by NSF of China (No. 11971152).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zhang, T., Duan, M. Stability and convergence analysis of stabilized finite element method for the Kelvin-Voigt viscoelastic fluid flow model. Numer Algor 87, 1201–1228 (2021). https://doi.org/10.1007/s11075-020-01005-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11075-020-01005-5
Keywords
- Stabilized method
- Kelvin-Voigt viscoelastic fluid flow model
- The lowest equal-order mixed elements
- The L’Hospital rule
- Negative norm technique