
Abstract
In this paper, the two-dimensional generalized nonlinear Schrödinger equations are introduced with the Lax pair. The existence of the Lax pair defines integrability for the partial differential equation, so the two-dimensional generalized nonlinear Schrödinger equations are integrable. Related to this development was the understanding that certain coherent structures called solitons play a basic role in nonlinear phenomena as fluid mechanics, nonlinear optics relativity, and lattice dynamics. Via the Hirota bilinear method, bilinear forms of the two-dimensional generalized nonlinear Schrödinger equations are obtained. Based on which one- and two-soliton solutions are derived. Furthermore, to find traveling wave solutions the extended tanh method is applied. Through 2D and 3D plots, the dynamical behavior of the obtained solutions is studied. The generalized form of the nonlinear Schrödinger equations has a mathematical and physical interest because a fundamental model in the field of nonlinear science. The used methods are quite useful in the solution of nonlinear partial differential equations.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The investigation of nonlinear evolution equations is the main area of research in the field of nonlinear dynamics. One of the nonlinear equations is the nonlinear Schrödinger (NLS) equation which arises from a wide variety of fields, such as weakly nonlinear dispersive water waves, quantum field theory and nonlinear optics [1,2,3,4]. Different modifications and generalizations of the NLS equations were proposed and studied [5,6,7,8,9,10,11]. There are various methods to study nonlinear equations, such as the Darboux transformation [12,13,14,15,16], the Hirota method [17,18,19,20,21], the sine-cosine [22, 23], the extended tanh method [24,25,26], and so on. In two-dimension, the generalized form of the NLS equation has a mathematical and physical interest because it is nonlinear partial differential equation and describes many physical phenomena such as nonlinear optical fibers, Bose–Einstein condensates, and water waves. As a coupled system, a one-dimensional generalized nonlinear Schrödinger (GNLS) equation with Maxwell–Bloch system was studied in [27, 28].
In this work, by Lax pair we introduce a generalization of the two-dimensional NLS equation with additional parameters as \(\alpha \) that denotes the amplification or absorption and \(\beta \) that relates to dispersion. The obtained two-dimensional GNLS system of equations is
where q is complex function, v is real function, \(\alpha \) and \(\beta \) are the constants, the subscripts denote the partial derivatives with respect to the variables x, y, t. The equations (1)-(2) admit next reductions: if \(\alpha =0,\beta =0\), we can obtain the two-dimensional nonlinear Schrödinger equations [29], if \(x=y, \alpha =0,\beta =0\), we can get the one-dimensional nonlinear Schrödinger equation [2,3,4].
The aim of this paper is to find some new solutions of Eqs. (1)–(2). We apply Hirota’s bilinear method and obtain the bilinear form of the two-dimensional GNLS system of equations. One soliton and two soliton solutions are constructed based on the obtained bilinear form. We derive traveling wave solutions using the extended tanh-method that provides wider applicability for handling nonlinear wave equations. The figures have been plotted to analyze the dynamical features of obtained solutions.
The article is organized as follows. In Sect. 2, we present the Lax pair for the two-dimensional GNLS system of Eqs. (1)–(2). In Sect. 3, the Hirota bilinear method is applied to obtain soliton solutions for two-dimensional GNLS system of equations. In Sect. 4, we obtain traveling wave solution by the extended tanh method. In Sect. 5, we summarize the results of our study.
2 Lax pair
The Lax pair provides the complete integrability of the nonlinear equation [2, 3]. In this section, we present the Lax pair for Eqs. (1)–(2) that can be expressed as follows:
where \(\varPsi =(\varPsi _1,\varPsi _2)^T\) (T denotes the transpose of a matrix), \(\lambda \) is a spectral parameter and the matrices U and V have the form
Through direct computations, it can be verified that the compatibility condition (also known as a zero-curvature condition):
exactly gives rise to
The above-coupled system can give two-dimensional GNLS Eqs. (1)–(2).
3 Soliton solutions
In order to obtain soliton solutions for the two-dimensional GNLS system of equations, we apply Hirota’s bilinear method. The method was suggested by Hirota [17, 19]. This approach provides a direct method for finding N-soliton solutions to nonlinear evolutionary equations. The stages of the method are described in the next section.
3.1 Description of Hirota’s bilinear method
The basic idea in Hirota’s bilinear method is as follows [3, 17, 19, 24]:
Bilinearization. At this stage, a dependent variable transformation is introduced. The transformation ought to reduce the nonlinear equation to the bilinear equation, which is quadratic in the dependent variables.
Transformation to the Hirota bilinear form. Hirota suggests the D-operator defined by
with \(x',y'\) and \(t'\) as three formal variables, g(x, y, t) and \(f(x',y',t')\) being two functions, l, m and n being three nonnegative integers. The operator (8) rewrites the bilinear equation in terms of the D operator as a combination of variable coefficient bilinear equations.
Using the Hirota perturbation. Formal perturbation expansion into this bilinear equation is introduced. This expansion is truncated in the case of soliton solutions. To prove that the suggested soliton form is indeed correct, we use mathematical induction.
3.2 Application
Bilinear form
The two-dimensional GNLS system of Eqs. (1)–(2) can be rewritten as
with the dependent variable transformations
where g is the complex function of x, y and t, f, h-are real ones, \(D_x\), \(D_y\) and \(D_t\) are the bilinear differential operators defined by (8).
To obtain the soliton solutions of Eqs. (9)–(11), we expand g, f, h with respect to a small parameter \(\epsilon \) as follows:
where \(g_j\), \((j=1,3,5,...)\) are the complex functions of x, y and t, and \(f_n,h_n\), \((n=2,4,6,...)\) are the real ones. Substituting expression (14)–(16) into (9)–(11) and collecting the coefficients of the same power of \(\epsilon \), we have from Eq. (9)
from Eq. (10)
and from Eq. (11)
With the benefit of the above expression and symbolic computation, we can obtain the one-, two-, and N-soliton solutions for Eqs. (1)–(2).
The one-soliton solutions
Truncating expressions (14)–(16) as
setting \(\epsilon =1\), and substituting them into bilinear forms (9)–(11), we can obtain the one-soliton solutions for the two-dimensional GNLS system of equations as follows:
where
with dispersion relation \(w_1=-\beta k_1+ik_1p_1+i\alpha \) where \(k_1=k_{1R}+ik_{1I},p_1=p_{1R}+ip_{1I},\theta _1=\theta _{1R}+i\theta _{1I}\).
The solutions (18)–(19) can also be written in the more conventional form
where \(\phi _1=\frac{R}{2}, \quad \phi _2=\frac{S}{2}\) and we have introduced the subscripts R and I for the real and imaginary parts of the quantity in question. (A positive root has been used to define \(e^{\frac{R}{2}}, e^{\frac{S}{2}}\) and hence \(\phi _1,\phi _2\) are real.) From this form, it is easy to identify the amplitudes \(k_{1R}, 2p_{1R}\sqrt{1-2k_{1R}}\) and the phases \(\phi _1,\phi _2\). Propagation of the one-soliton solutions (18)–(19) is shown in Figs. 1 and 2.

The time evolutions of the one-soliton solution (18). The parameters are: \(k_1=1+i; p_1=1-i;\alpha =1;\beta =2\)

The time evolutions of the one-soliton solution (19). The parameters are: \(k_1=1+i; p_1=1-i;\alpha =1;\beta =2\)
The two-soliton solutions
To derive the two-soliton solutions for Eqs. (1)–(2), we truncate expressions (14)–(16) as
set \(\epsilon =1\) and substitute them into the bilinear Eqs. (9)–(11) than we get
where
with
with dispersion relations \(w_j=-\beta k_j+ik_jp_j+i\alpha \), where \(k_j=k_{jR}+ik_{jI}, p_j=p_{jR}+ip_{jI}, \theta _j=\theta _{jR}+i\theta _{jI} \quad (j=1,2)\).
The multi-soliton solutions
To construct multi-soliton solutions for Eqs. (1)–(2), we have to expand g, f and h formally as power series expansions (14)–(16) in terms of a small arbitrary real parameter \(\epsilon \). Then, by substituting Eqs. (14)–(16) into bilinear Eqs. (9)–(11) and solving the resultant set of equations recursively, we can obtain the explicit values for the functions g, f, h.
For multi-soliton solutions, the expansions (14)–(16) can be in the following form:
One-soliton solution
where \(g_{1}=e^{\theta _{1}}\), with \(\theta _1=k_1x+p_1y+w_1t+\theta _{10}\), and \(k_1, p_1, w_1, \theta _{10}\) are constants. The explicit values for the functions \(f_2, h_2\) are determined from Eqs. (9)–(11). Note that \(g_j = 0\) for \(j=3,5,7,\ldots \) and \(f_n=0,h_n=0\) for \(n=4,6,8\ldots \).
Two-soliton solution
where \(g_{1}=e^{\theta _{1}}+e^{\theta _{2}}\), with \(\theta _i=k_ix+p_iy+w_it+\theta _{i0}\), and \(k_i, p_i, w_i, \theta _{i0}, (i=1,2)\) are constants. The explicit values for the functions \(g_3, f_2, f_4, h_2,h_4\) are determined from Eqs. (9)–(11). Note that \(g_j = 0\) for \(j=5,7,9 ...\) and \(f_n=0,h_n=0\) for \(n=6,8,10...\).
Three-soliton solution
where \(g_{1}=e^{\theta _{1}}+e^{\theta _{2}}+e^{\theta _{3}}\), with \(\theta _i=k_ix+p_iy+w_it+\theta _{i0}\), and \(k_i, p_i, w_i, \theta _{i0}, (i=1,2,3)\) are constants. The explicit values for the functions \(g_3,g_5,f_2,f_4,f_6,h_2,h_4,h_6\) are determined from Eqs. (9)–(11). Note that \(g_j = 0\) for \(j=7,9,11\ldots \) and \(f_n=0,h_n=0\) for \(n=8,10,12\ldots \).
Four-soliton solution
where \(g_{1}=e^{\theta _{1}}+e^{\theta _{2}}+e^{\theta _{3}}+e^{\theta _{4}}\), with \(\theta _i=k_ix+p_iy+w_it+\theta _{i0}\), and \(k_i, p_i, w_i, \theta _{i0}, (i=1,2,3,4)\) are constants. The explicit values for the functions \(g_3, g_5, g_7, f_2,f_4,f_6,f_8, h_2,h_4,h_6,h_8\) are determined from Eqs. (9)–(11). Note that \(g_j = 0\) for \(j=9,11,13 ...\) and \(f_n=0,h_n=0\) for \(n=10,12,14...\).
and etc
The above procedure of obtaining soliton solutions can be extended to N soliton solutions with some effort, though the analysis is unwieldy. Unfortunately, if we try to continue to higher orders with the solution
the analysis becomes cumbersome. So, in this subsection, we only present a short explanation of deriving multi-soliton solutions.
Discussion on the soliton solutions
In this section, we graphically investigate solutions (18)–(19) and (23)–(24).
Figure 1 displays the evolution of the bright one-soliton for solution (18), and Fig. 2 displays the evolution of the dark one-soliton for solution (19). It can be seen that the bright one-soliton and dark one-soliton keep their directions, widths, and amplitudes invariant during the propagation on the \(x-y\) plane.
In Figs. 3 and 4, we present 3D plot of the interaction between the two-solitons via solutions (23)–(24) on the \(x-y\) plane. We notice that the bright two solitons (23) and dark two solitons (24) are traveling to the left by saving shape.
In order to study the direction of the two solitons, we consider next cases for the parameters:
-
(I)
\(\alpha >\beta \); \(k_{1R},p_{1R}>0; k_{2R},p_{2R}<0; k_{1R},p_{1R}>k_{2R},p_{2R}; k_{1I},k_{2I},p_{1I},p_{2I}>0; p_{1I},k_{1I}<k_{2I},p_{2I}\);
-
(II)
\(\alpha <\beta \); \(k_{1R},p_{1R}>0; k_{2R},p_{2R}<0; k_{1R},p_{1R}>k_{2R},p_{2R}; k_{1I},k_{2I},p_{1I},p_{2I}>0; p_{1I},k_{1I}<k_{2I},p_{2I}\);
-
(III)
\(\alpha <\beta \); \(k_{1R},p_{1R}<0; k_{2R},p_{2R}>0; k_{1R},p_{1R}<k_{2R},p_{2R}; k_{1I},k_{2I},p_{1I},p_{2I}>0; p_{1I},k_{1I}<k_{2I},p_{2I}\);
-
(IV)
\(\alpha >\beta \); \(k_{1R},p_{1R}<0; k_{2R},p_{2R}>0; k_{1R},p_{1R}<k_{2R},p_{2R}; k_{1I},k_{2I},p_{1I},p_{2I}>0; p_{1I},k_{1I}<k_{2I},p_{2I}\).
In Fig. 5, we present the result of case (I) as we notice that bright two-solutions q (blue solid line ) and dark solitons v (red dashed line) move to the right by keeping form and direction. In case (II), bright and dark two solitons change directions by traveling to the left (see Fig. 6). The result of case (III) we present in Fig. 7 where two solitons after interaction move to the right by saving shape and direction. In Fig. 8, interaction of case (IV) is shown. As we notice, bright two solitons q (blue solid line ) and dark two solitons v (red dashed line) travel to the left.

The time evolutions of the two-soliton solution (23). The parameters adopted here are: \(k_1=0.8+0.8i; p_1=1-4i;k_2=-1+0.8i; p_2=-1+i; \alpha =1; \beta =2\)

The time evolutions of the two-soliton solution (24). The parameters adopted here are: \(k_1=0.8+0.8i; p_1=1-4i;k_2=-1+0.8i; p_2=-1+i; \alpha =1; \beta =2\)




4 Traveling wave solutions
We use the extended tanh method [24] to obtain traveling wave solutions for the two-dimensional GNLS system of equations. The tanh method was suggested by Malfliet [30] and then was extended by Wazwaz [24]. In the next section, the description of the method is presented.
4.1 Description of the extended tanh method
The partial differential equation (PDE)
where \(E_1\) is a polynomial of q(x, y, t) and its partial derivatives in which the highest order derivatives and nonlinear terms are involved, can be converted to the ordinary differential equation (ODE)
by using a wave variable
where c is the constant. We integrate Eq. (26) as long as all terms contain derivatives. Constants of integration are considered zeros. By using a new independent variable
where \(\mu \) is the wave number, we have the following change of derivatives:
The extended tanh method admits the use of the finite expansion in the following form:
where \(a_0,a_1,a_2,a_3,\ldots ,a_N\) and \(b_1,b_2,b_3,\ldots ,b_N\) are unknown constants. M is obtained balancing the highest order derivative term and the nonlinear terms in Eq. (26). Then, put the value of \(Q(\xi )\) from (29) in Eq. (26), and comparing the coefficient of \(Y^n\) we can obtain the values of the coefficients \(a_0,a_1,a_2,a_3,\ldots ,a_N\) and \(b_1,b_2,b_3,\ldots ,b_N\).
4.2 Application
In this section, we obtain exact traveling wave solutions of the two-dimensional GNLS system of equations using the extended \(\tanh \) method [24, 26]. For applying this method, we ought to reduce the system (1)–(2) to the system of ordinary differential equations. If we consider the transformation
where a, b, d are the constants, Q(x, y, t) is the real-valued function, then the system (1)–(2) reduced to the following system of differential equations
Substituting the wave transformation
into system (31)–(33), we obtain that
From Eq. (37), we have that
Integrating Eq. (38) with respect to \(\xi \) and taking integration constant zero for simplicity, we find
Substituting Eq. (40) into Eq. (36), we obtain the following ordinary differential equation
where prime denotes the derivation with respect to \(\xi \). Balancing the nonlinear term \(Q^3\), which has the exponent 3M, with the highest order derivative \(Q^{''}\), which has the exponent \(M+2\), in (41) yields \(3M=M+2\) that gives \(M=1\). Then, the extended tanh method allows us to use the substitution
Substituting (42) into (41) and collecting the coefficients of Y, we obtain a system of algebraic equations for \(a_0,a_1,b_1,\mu \). Solving this system with the aid of Maple, we obtain the following results:
Result 1:
Result 2:
Result 3:
Result 4:
By substituting Eq. (42) into (34), (40) and then the obtained expressions into (30) and (35), we can obtain solutions for the two-dimensional GNLS system of Eqs. (1)–(2) in the following form
where \(\xi =x+y-ct\).
Finally, substituting the results (43)–(56) into (57)–(58), we can obtain traveling wave solutions in the next forms
where \(\xi =x+y-(a+b-\beta )t\).
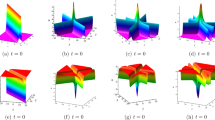
Discussion on the traveling wave solutions
In this section, we analyze obtained traveling wave solutions (59)–(66). In Figs. 9, 10, 11 and 12, we present propagation of solutions (59)–(62) on the \(x-y\) plane at \(t=0\) and \(t=3\). As we notice from 3D plots and density plots, the solutions \(q_1, v_1 , q_2, v_2\) give the bright solitons. The evolution of the dark soliton solutions \(q_3,v_3\) in 3D and density plot at \(t=0\) is displayed in Figs. 13 and 14. It can be seen that the dark solitons and bright solitons keep their directions invariant during the propagation on the \(x-y\) plane. Moreover, periodic type solutions \(q_4,v_4\) at \(t=0\) and \(t=3\) are presented in Figs. 15 and 16. Analyzing the graphs of obtained solutions, we notice that in case \(q_1, v_1, q_2, v_2\) we can obtain bright solitons which are almost similar to the one-soliton solutions obtained by Hirota’s bilinear method in Sect. 3. But in case \(q_3, v_3, q_4, v_4\), dark solitons and periodic solutions can be derived. Thus, the extended tanh method can yield various types of solutions compared to Hirota’s bilinear method.
The algorithms described in Sects. 3 and 4 can be applied to a wide class of nonlinear partial differential equations. The main advantage of the extended tanh method is the possibility of reducing the size of computational work in contrast to Hirota’s bilinear method. Moreover, the extended tanh method can give a different type of solutions such as soliton, kink, periodic solutions, peakon. However, for deriving multi-soliton solutions, Hirota’s bilinear method is a very helpful tool compared to the extended tanh method. The disadvantages of Hirota’s bilinear method are cumbersome calculation, and also sometimes, it is difficult to find a bilinear form for nonlinear partial differential equations.

Propagation of the solution \(q_1\) via (59) with the \(\alpha =1;\beta =3\)

Propagation of the solution \(v_1\) via (60) with the \(\alpha =1;\beta =3\)

Propagation of the solution \(q_2\) via (61) with the \(\alpha =1;\beta =3\)

Propagation of the solution \(v_2\) via (62) with the \(\alpha =1;\beta =3\)

Propagation of the solution \(q_3\) via (63) with the \(\alpha =1;\beta =3\)

Propagation of the solution \(v_3\) via (64) with the \(\alpha =1;\beta =3\)

Propagation of the solution \(q_4\) via (65) with the \(\alpha =1;\beta =3\)

Propagation of the solution \(v_4\) via (66) with the \(\alpha =1;\beta =3\)
5 Conclusion
In this work, we presented the two-dimensional generalized nonlinear Schrödinger system of equations with the Lax pair. The Lax pair plays an important role in the study of the integrability of the differential system. By employing two methods, we have obtained the nonlinear wave solutions for the two-dimensional generalized nonlinear Schrödinger equations. Soliton solutions are derived by Hirota’s bilinear method. This method gives a mechanism for finding arbitrary N-soliton solutions for PDEs which can be written in bilinear form in the D-operator via a transformation of the dependent variable. We obtained the traveling wave solutions using the extended tanh method that provides wider applicability for handling nonlinear wave equations. The figures are plotted to display the dynamical features of those solutions. Moreover, the presented methods can be applied to obtain new solutions for other nonlinear equations.
Data Availability Statement
This manuscript has associated data in a data repository. [Authors’ comment: All data included in this manuscript are available upon request by contacting with the corresponding author].
References
V.E. Zakharov, A.B. Shabat, Exact theory of two-dimensional self-focusing and one-dimensional self-modulation of waves in nonlinear media. Sov. Phys.-JETP 34(1), 62–69 (1972)
M.J. Ablowitz, P.A. Clarkson, Solitons (Cambridge University Press, Nonlinear Evolution Equations and Inverse Scattering. First Printing. Cambridge, 1991)
M.J. Ablowitz, H. Segur, Solitons and Inverse Scattering Transform (SIAM, Philadelphia, 1981)
M.J. Ablowitz et al., Discrete and Continuous Nonlinear Schrödinger Systems (Cambridge University Press, Cambridge, 2004)
K. Mio et al., Modified nonlinear Schrödinger equation for Alfvén waves propagating along the magnetic field in cold plasmas. J. Phys. Soc. Jpn. 41, 265–271 (1976)
R. Guo, H. Hao, Breathers and multi-soliton solutions for the higher-order generalized nonlinear Schrödinger equation. Commun. Nonlinear Sci. Numer. Simul. 18(9), 2426–2435 (2013)
S. Novikov et al., Theory of Solitons: The Inverse Scattering Method (First printing, Springer Science and Business Media, 1984)
V.E. Zakharov, Stability of periodic waves of finite amplitude on the surface of a deep fluid. J. Appl. Mech. Tech. Phys. 9(2), 190–194 (1968)
M.S. Osman et al., The unified method for conformable time fractional Schrödinger equation with perturbation terms. Chin. J. Phys. 56(5), 2500–2506 (2018)
J.J. Su, Y.T. Gao, N th-order bright and dark solitons for the higher-order nonlinear Schrödinger equation in an optical fiber. Superlattices Microstruct. 120, 697–719 (2018)
Y.Q. Yang, X. Wang, Z.Y. Yan, Optical temporal rogue waves in the generalized inhomogeneous nonlinear Schrodinger equation with varying higher-order even and odd terms. Nonlinear Dyn. 81, 833 (2015)
V.B. Matveev, M.A. Salle, Darboux Transformations and Solitons (First printing. Springer-Verlag, Berlin Heidelberg, 1991)
G. Bekova et al., Dark and bright solitons for the two-dimensional complex modified Korteweg-de Vries and Maxwell-Bloch system with time-dependent coefficient. J. Phys. Conf. Ser. 965, 012035 (2018)
Ch. Li, J. He, Darboux transformation and positons of the inhomogeneous Hirota and the Maxwell-Bloch equation. Science China: Phys. Mech. Astron. 57(5), 898 (2014)
K.R. Yesmakanova et al., Exact solutions for the (2+1)-dimensional Hirota-Maxwell-Bloch system. AIP Conf. Proc. 1880, 060022 (2017)
K.R. Yesmakanova et al., Determinant reprentation of darboux transformation for the (2+1)-dimensional Schrodinger-Maxwell-Bloch equation. Adv. Intell. Syst. Comput. 441, 183–198 (2016)
R. Hirota, Exact solution of the Korteweg-de Vries equation for multiple collisions of solitons. Phys. Rev. Lett. 27, 1192–1194 (1971)
B.B. Kutum et al., The differential-q-difference 2D Toda equation: Bilinear form and soliton solutions. J. Phys. Conf. Ser. 1394, 012122 (2019)
R. Hirota, The Direct Method in Soliton Theory (Cambridge University Press, Cambridge, 2005)
W. Hereman, A. Nuseir, Symbolic methods to construct exact solutions of nonlinear partial differential equations. Math. Comput. Simul. 43, 13–27 (1997)
X. Lu, W.X. Ma, Study of lump dynamics based on a dimensionally reduced Hirota bilinear equation. Nonlinear Dyn. 85, 1217 (2016)
M.T. Darvishi et al., Travelling wave solutions for Boussinesq-like equations with spatial and spatial-temporal dispersion. Romanian Reports Phys. 70(2), 1–12 (2018)
A.M. Wazwaz, The tanh and the sine-cosine methods for a reliable treatment of the modified equal width equation and its variants. Commun. Nonlinear Sci. Numer. Simul. 11(2), 148–160 (2006)
A.M. Wazwaz, Partial Differential Equations and Solitary Waves Theory (Springer-Verlag, Berlin Heidelberg, 2009)
G. Bekova et al., Travelling wave solutions for the two-dimensional Hirota system of equations. AIP Conf. Proc. 1997, 020039 (2018)
A.M. Wazwaz, The extended tanh method for new solitons solutions for many forms of the fifth-order KdV equations. Appl. Math. Comput. 184(2), 1002–1014 (2007)
R. Guo, H. Hao, L. Zhang et al., Bound solitons and breather for the generalized coupled nonlinear Schrodinger Maxwell Bloch system. Modern Phys. Lett. B 27(17), 1350130 (2013)
D.W. Zuo, Y.T. Gao, Y.J. Feng, L. Xue, Rogue-wave interaction for a higher-order nonlinear Schrödinger Maxwell Bloch system in the optical-fiber communication. Nonlinear Dyn. 78, 2309 (2014)
G.N. Shaikhova, B.B. Kutum, Traveling wave solutions of two-dimensional nonlinear Schrodinger equation via sine-cosine method. Eurasian Phys. Tech. J. 17(33), 169–174 (2020). (No.1)
W. Malfliet, W. Hereman, The tanh method: I. Exact solutions of nonlinear evolution and wave equations. Physica Scripta 54, 563–568 (1996)
Acknowledgements
This research is funded by the Science Committee of the Ministry of Education and Science of the Republic of Kazakhstan (Grant No. AP08956932).
Author information
Authors and Affiliations
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Burdik, C., Shaikhova, G. & Rakhimzhanov, B. Soliton solutions and traveling wave solutions of the two-dimensional generalized nonlinear Schrödinger equations. Eur. Phys. J. Plus 136, 1095 (2021). https://doi.org/10.1140/epjp/s13360-021-02092-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjp/s13360-021-02092-6