
Abstract
We study linear stability of a steady state for a generalization of the basic rheological Pokrovskii–Vinogradov model which describes the flows of melts and solutions of an incompressible viscoelastic polymeric medium in the nonisothermal case under the influence of a magnetic field. We prove that the corresponding linearized problem describing magnetohydrodynamic flows of polymers in an infinite plane channel has the following property: For some values of the conduction current which is given on the electrodes (i.e. at the channel boundaries), there exist solutions whose amplitude grows exponentially (in the class of functions periodic along the channel).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
INTRODUCTION
In this article we study a generalization of the structurally phenomenological Pokrovskii–Vinogradov model describing the flows of melts and solutions of incompressible viscoelastic polymeric media to the nonisothermal case under the influence of a magnetic field. In the Pokrovskii–Vinogradov model, the polymeric system is considered as a suspension of polymer macromolecules moving in an anisotropic fluid formed, for example, by a solvent and other macromolecules. Impact of the environment to a real macromolecule is approximated by the action onto a linear chain of Brownian particles each of which is a rather large part of the macromolecule. The Brownian particles are often called the “beads,” they are connected to each other by the elastic forces called “springs.” In the case of slow motions, the macromolecule is modeled by a chain of two particles called a “dumbbell.”
The physical representation of linear polymeric flows described above results in the formulation of the Pokrovskii–Vinogradov rheological model [1–3]:
where \(\rho \) is the polymer density, \(v_i \) is the \(i \)th component of the velocity, \(\sigma _{ik} \) is the stress tensor, \(p \) is the hydrostatic pressure, \(\eta _0 \) and \(\tau _0 \) are the initial values of the shear viscosity and the relaxation time for the viscoelastic component, \(v_{ij}\) is the tensor of the velocity gradients, \(a_{ik}\) is the symmetric tensor of anisotropic stresses of second rank, \(I \) is the first invariant of the tensor of anisotropic stresses, \(\gamma _{ik}\) is the symmetrized tensor of the velocity gradients, \(k \) and \(\beta \) are the phenomenological parameters accounting for the shape and the size of the coiled molecule in the dynamical equations of the polymer macromolecule. Here (1) is the equation of motion and the condition of incompressibility, (2) and (3) are the rheological relation that connects the kinematic characteristics of the flow and its thermodynamic parameters.
Some generalizations of model (1)–(3) (for example, when some term is added into (2) to take into account the so-called shear viscosity, and the parameter \(\beta \) depends also on the first invariant of the anisotropy tensor) provide rather good results in numerical simulations of viscometric flows, i.e. when the components of the tensor of velocity gradients are some given functions of time [4]. Therefore, we can assume that some modifications of the basic Pokrovskii–Vinogradov model can be useful for modeling the polymer motion under complex conditions of deformation, for example, for the stationary and nonstationary flows in circular channels, flows in the channels with fast change of the sectional area, and the flows with free boundary. An important peculiarity of these flows is their two- and three-dimensional character.
In this article, we consider one of such generalizations that takes into account the influence of the heat and the magnetic field on the polymeric fluid motion. Our main interest is the linear stability of a steady state of the mathematical model in the case when the polymeric medium flows in an infinite plane channel.
Structurally, Section 1 is devoted to the statement of a nonlinear model that describes the MHD flow of an incompressible viscoelastic fluid provided that heat is supplied to the channel boundaries. In Section 2, we obtain some model linearized with respect to the steady state and formulate the main results of this article. The final Section 3 contains their proofs.
The results in this article are closely related to those of [5-11] in which, in particular, we obtained some asymptotic representations of the eigenvalues of the mixed problems arising in the description of the polymeric flows in an infinite plane channel. We use various generalizations of the Pokrovskii-Vinogradov model as the mathematical models, and the main solutions are analogous to a Poiseuille shear flow for the Navier–Stokes system. Finally, note that in [12] for the linear mixed problems the results are presented with some estimates of the real parts of the eigenvalues when the Reynolds number increases (as the main solutions, there are chosen some known shear flows). We use the Navier–Stokes model for a viscous fluid.
1. A NONLINEAR MODEL OF THE POLYMERIC FLUID FLOW IN A PLANE CHANNEL UNDER THE PRESENCE OF AN EXTERNAL MAGNETIC FIELD
Using the results of [3, 13–16] and following [17], we formulate the mathematical model that describes the magnetohydrodynamic flows of an nonisothermal incompressible polymeric fluid. Consider some variant of this model in which, by analogy with [18], we introduce some dissipative terms in the equation for the heat gain.
In dimensionless form this version of the mathematical model can be written as follows:
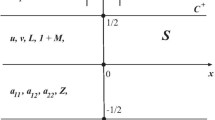
Here \(t \) is time, \(\vec {u}=(u,v) \); \(L\) and \(1+M \) are the components of the magnetizing force \(\vec {H} \) in the Cartesian coordinate system \(x \) and \(y \);
\(p\) is the pressure; \(a_{11} \), \(a_{22}\), and \(a_{12} \) are the components of the symmetrical anisotropy tensor of second rank;
\(I = a_{11} + a_{22}\) is the first invariant of the anisotropy tensor; \(k\) and \(\beta \) (\(0 < \beta < 1\)) are the phenomenological parameters of the rheological model (see [1]);
where \(T \) is the temperature, \(T_0 \) is the average temperature (room temperature; we will further assume that \(T_0 = 300\) K);
The constants are described in detail in [17, 19–21]: \(E_A \) is the activation energy, \(\mathop {\rm Re}\nolimits \) is the Reynolds number, \(\mathop {\rm W}\nolimits \) is the Weissenberg number, \({\mathop {\rm Gr}\nolimits } ={\mathop {\rm Ra}\nolimits }/ {\mathop {\rm Pr}\nolimits } \) is the Grasshoff number, \(\mathop {\rm Pr}\nolimits \) is the Prandtl number, \(\mathop {\rm Ra}\nolimits \) is the Rayleigh number, \(A_r \) and \(A_m \) are the dissipative coefficients, \(\sigma _m \) is the magnetic pressure coefficient, \(b_m=1/{\mathop {\rm Re}\nolimits }_m \), and \({\mathop {\rm Re}\nolimits }_m \) is the magnetic Reynolds number. Further,
and \(\Delta _{x,y}\) is the Laplace operator
The variables \(t \), \(x\), \(y \), \(u\), \(v \), \(p\), \(a_{11} \), \(a_{22}\), \(a_{12} \), \(L\), and \(M \) in (4)–(11) correspond to the following values: \(l/u_H \), \(l\), \(u_H \), \(\rho u_H^2\), \({\mathop {\rm W}\nolimits } /3\), and \(H_0 \), where \(H_0 \) is the characteristic magnetizing force (see Fig. 1)

A plane channel.
Remark 1\(. \) The MHD equations (4)–(11) are derived with the use of the Maxwell equations (see [13, 15]). Moreover, the magnetic induction vector \(\vec {B} \) is represented as
where \(\chi \) is the magnetic susceptibility (see [22, 23]), \(\chi =\chi _0/Z \), and \(\chi _0 \) is the magnetic susceptibility for \(T = T_0 \); \(\mu \) is the magnetic penetration of the polymeric fluid, and \(\mu _0\) is magnetic permeability in vacuum. In what follows, we assume that for a polymeric medium \(\mu =1 \) (i.e., \(\chi _0 = 0 \)).
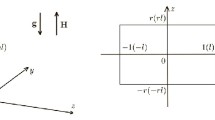
Remark 2\(. \) Our main target is the problem of finding the solutions to (4)–(11) that describe magnetohydrodynamic flows of an incompressible polymeric fluid in a plane channel \(S\) of depth \(1(l) \). The cannel is bounded with the horizontal walls that are the electrodes \(C^{+}\) and \(C^{-} \) along which we have the conduction currents of current strengths of \(J^{+}\) and \(J^{-} \) respectively (see the figure). The domains \( S_1^{+}\) and \(S_1^{-} \) external to the channel are under the influence of the uniform magnetic fields with components \(L_1^{\pm }\) and \(M_1^{\pm } \) respectively:
Moreover, \(\chi _1^{+}\) and \(\chi _1^{-} \) are the magnetic susceptibilities of the magnets \(S_1^{+} \) and \(S_1^{-} \), while \(\chi = \chi _0/Z \). The temperature values on the channel walls will be defined below on using (13). Finally, the correlations between the boundary values \(M_1^{+} + 1 \), \(1 + M(1/2)\) and \(M_1^{-} + 1 \), \(1 + M(-1/2)\) arise correspondingly due to continuity of the normal component of the magnetic induction vector on the channel walls and equality (12).
On the channel walls we have the boundary conditions:
The temperature is given too:
Moreover, for \(\bar {\theta } > 0 \) we have some heating from below; and for \(\bar {\theta } < 0\) the heating occurs from above.
Remark 3\(. \) We will consider the electrodes \(C^{+} \) and \(C^{-} \) as the boundaries between the two uniform isotropic magnetics. Therefore, the following well-known boundary conditions hold (see [22, 24]):
Assuming that (5) holds for \(y = \pm 1/2\), \(L = -J^{+} \) for \(y = 1/2 \), and \(L = -J^{-} \) for \(y = -1/2 \) (see (14)), we arrive at the boundary condition \(M_y = 0 \) at \(y = \pm 1/2 \).
Remark 4\(. \) Note that under the conditions
we have \(d \equiv 0 \) for \(t > 0 \), \(|y| < 1/3 \), and all \(x \in \mathbb {R} \); i.e., (5) follows from (4) and (11).
To prove this we apply the operator \(\mathop {\rm div}\nolimits \thinspace \) to (11). Taking (4) into account, we obtain
and then
Integrating this relation with respect to \(x \) from \(-\infty \) to \(+\infty \) and with respect to \(y \) from \(-1/2 \) to \(1/2 \), we have
which implies
i.e., \(d \equiv 0\) for \(t > 0 \), \(|y| < 1/2 \), and \(x\in \mathbb {R} \).
2. A STEADY STATE. THE LINEARIZED PROBLEM. FORMULATION OF THE MAIN RESULTS
As the main solution to problem (4)–(11),(13),(14) we take the steady state: \(\hat {\vec {u}} \equiv 0\), \(\hat {\alpha }_{11} = \hat {\alpha }_{12} = \hat {\alpha }_{22} \equiv 0 \), \(p(t,x,y) = \hat {p}_0 = {\mathrm {const}}\), \(\widehat {Z} \equiv 1 \) (\(\bar {\theta } = 0 \) and in what follows), \(\hat {L} = J_0 \) (\(J^{\pm } = J_0 \) and in what follows), and \(\widehat {M} = \hat {\lambda } = \chi _0^{+} = \chi _0^{-}\).
Linearizing (4)–(11) with respect to the chosen steady state, we arrive at the linear system:
Here
Note that (5) is omitted according to Remark 4. Moreover, if \((\alpha _{11} + \alpha _{22})|_{t =0} \equiv 0 \) then from the third, fifth, and last equations of (15) it follows that
By (13) and (14), the boundary conditions for the linearized problem (15) are as follows:
Remark 5\(. \) As was noted in Section 1, the boundary values of the components \( M_1^{+}\) and \(M_1^{-} \) in the domains \(S_1^{+} \) and \(S_1^{-} \) are determined as follows:
where \(M(1/2) \) and \(M(-1/2) \) are the values of \(M \) on the upper and lower electrodes respectively.
Suppose that \(S_1^{\pm }\) are filled with nonconductive media. Then, owing to the Maxwell’s equations [23], we conclude that the small and time-independent perturbations of \(M_1^{\pm }\) satisfy the Laplace equation and the additional conditions at infinity:
If the components of \(M_1^{\pm } \) are periodic functions in \(x \) so that
then from (19) we obtain
Thus, by (18), the components \(L_1^{\pm } \) and \(1 + M_1^{\pm } \) are defined of the tension vector \(\vec {H} \) in \(S_1^{\pm } \).
Consider the particular case of the model (15), (17) for \(b_m = 0 \) (the absolute conductivity) and additionally assume that \(A_m = 0\). Then (15), (17) will be much simpler and have only four unknowns: \(u\), \(v \), \(\alpha _{12} \), and \(\Omega \).
Let the class of admissible perturbations contain the periodic functions of \(x \), namely,
where \(\lambda = \eta + i\omega _0 \), \(\omega _0,\omega \in \mathbb {R}\) (in what follows we will omit the \(\sim \) mark for the unknown functions).
Using (20), we transform the boundary value problem (15), (17), and obtain the spectral problem
where
Remark 6\(. \) The functions \(L(y) \) and \(M(y) \) are found as follows:
and, moreover, \(L_x + M_y = 0 \).
Thus, we have
Proposition 1. \(. \) If \(J_0 \) is small enough then some nontrivial solutions of \((21)\) exist with \(\Re \lambda \thinspace (=\eta ) > 0 \) .
And as a consequence, the following holds:
Proposition 2\(. \) The steady state of \((4) \)– \( (11)\) with boundary conditions \((13)\) and \((14)\) \((\bar {\theta } = 0 \), \(J^{\pm } = J_0 \), and \(J_0 \) is small enough \() \) in the case of absolute conductivity \((b_m = 0\), with additional \(A_m = 0)\) is linearly unstable in the sense of Lyapunov.
3. PROOFS OF PROPOSITIONS 1 AND 2
The nontrivial solution of (21) can be written as follows:
where \(\exp \{(y + 1/2)A\} \) denotes the matrix exponent.
Therefore, the nontrivial solution to (21) exists if and only if the following is satisfied:
which is actually the equation for defining \(\lambda \).
The columns of the matrix exponent \((Y_{ik})_{i,k = 1,2,3,4} = \exp \{A\}\) are the solution of the system (hereinafter, if this does not cause confusion, we omit the second index):
and, moreover,
Then it follows from the explicit form of the \(R \)-matrix that (23) is equivalent to the relation
For the third and fourth columns of \(\exp \{A\} \) we obtain from (24)
Rewrite the last two differential relations of (26) as
Here \(\widetilde {Y}_i (y) = e^{-a_2 (y + 1/2)} Y_i(y) \), \(i = 3,4 \). Taking (26) into account, from (27) we obtain
Using the Fubini Theorem to reduce the multidimensional integrals to the one-dimensional and returning to the vector function \(Y_3(y) \), we infer
where
Let us find a solution to (29). To this end, we first change the variables \(\eta = \xi + 1/2\) and \(x = y + 1/2 \) and put \(W(x) = Y_3(x - 1/2) \). Then (29) can be rewritten as
Applying the Laplace transform to (31), we obtain
Here \(\widehat {W}(p)\) is the image of \(W(x) \). Then
where \(B(p) \) is the polynomial of degree \(4 \):
Using the inverse transformation, in the case of simple zeros of \(B(p) \), \(p_l \neq p_k \), \(l \neq k \), we find the solution to (29):
and moreover,
By (35), we know the third and fourth components of the third column of \(\exp \{A\} \) and transform (25) (we also take (26) into account) as follows:
Note that the following is valid:
Assuming in (37) that
we obtain the equivalent form of (36):
which is the equation for \( \lambda \) by analogy to (36).
Remark 7\(. \) Owing to representation (33) of \(B(p) \), we can remove the constraint \(a^2 + \omega ^2 \neq 0 \) imposed earlier.
In the particular case of \(J_0 = 0\), the roots \(p_k \) of \(B(p)=0 \) are found as follows:
Here
or
Given \(\sigma _m\), \(\hat {\lambda }\), \(|\omega | \), \(\varkappa ^2 \), and \(\chi ^2 \), we numerically found the positive reals \(\Lambda ^{(0)} > 0\) (if any) satisfying condition (38) (see Table 1). For many collections of \(\sigma _m \), \(\hat {\lambda } \), \(|\omega | \), \(\varkappa ^2 \), and \(\chi ^2 \), the reals \(\Lambda ^{(0)} > 0 \) were found (some of these calculations are presented in Table 1). In fact, to prove the Lyapunov instability (see below the proof of Proposition 2) we need to provide only one set of the parameters \( \sigma _m\), \(\hat {\lambda } \), \(|\omega | \), \(\varkappa ^2 \), and \(\chi ^2 \) for which \(\Lambda ^{(0)} > 0 \) is found.
Remark 8\(. \) The original problem does not contain the inherent velocity \( u_H\). At the same time, the process of linearization of (4)–(11) proceeds provided that \(|\vec {u}| = \sqrt {u^2 + v^2} < u^{*} \) is some characteristic quantity (rather small) that we take further as \(u_H\). Therefore, the numerical results were obtained for some small values of the Reynolds and Weissenberg numbers: \({\mathop {\rm Re}\nolimits } = \rho u_H l/\eta _0\) and \({\mathop {\rm W}\nolimits } = \tau _0 u_H /l\), where \(\rho \thinspace (={\mathrm {const}})\) is the density of the medium, while \(\eta _0\) and \(\tau _0 \) are the initial values of shear viscosity and relaxation time at the room temperature \(T_0\) (see [1]).
If \( J_0 \neq 0\) is small; then, by the Rouche Theorem [25], we conclude that in some neighborhood of \(\Lambda ^{(0)}\) on the complex plane there exist complex numbers \(\Lambda \) satisfying (38) and such that \(\Re \Lambda > 0\).
This completes the proof of Proposition 1.
The proof of Proposition 2 follows from Proposition 1 if to boundary value problem (4)–(11), (13), and (14) transformed in the case of absolute conductivity (recall that we consider \(b_m=0 \) and, moreover, \(A_m=0 \)), we add the initial conditions of the form
where \(U^{*} = (0,0,0)^\top \), \(\Omega ^{*} = \hat {p}_0 \) is the steady state in this case. Then, by Proposition 1, this mixed problem has an exponentially runaway solution, which leads to the Lyapunov instability of the steady state. Proposition 2 is proved.
CONCLUSION
In this article we prove the linear instability in the sense of Lyapunov (at certain values of the conduction current) of the steady state of the MHD model flow of an incompressible viscoelastic polymeric medium in an infinite plane channel (conduction currents and heat are applied to the channel boundaries to the electrodes).
REFERENCES
G. V. Pyshnograi, V. N. Pokrovskii, Yu. G. Yanovskii, I. F. Obraztsov, and Yu. N. Karnet, “Constitutive Equation of Nonlinear Viscoelastic (Polymer) Media in Nought Approximation by Parameter of Molecular Theory and Conclusions for Shear and Extension,” Dokl. Akad. Nauk 339 (5), 612–615 (1994).
V. N. Pokrovskii, The Mesoscopic Theory of Polymer Dynamics (Springer, London, 2010).
Yu. A. Altukhov, A. S. Gusev, and G. V. Pyshnograi, Introduction to the Mesoscopic Theory of Fluid Polymeric Systems (Izd. Altai. Gos. Ped. Akad., Barnaul, 2012) [in Russian].
K. B. Koshelev, G. V. Pyshnograi, A. E. Kuznetsov, and M. Yu. Tolstykh, “A Temperature Dependence of the Hydrodynamic Characteristics of a Polymeric Melt Flow in a Convergent Channel,” Mekhanika Kompoz. Materialov i Konstruktsii 22 (2), 175–191 (2016).
A. M. Blokhin, A. V. Egitov, and D. L. Tkachev, “Linear Instability of Solutions in a Mathematical Model Describing Polymer Flows in an Infinite Channel,” Zh. Vychisl. Mat. Mat. Fiz. 55 (5), 850–875 (2015) [Comput. Math. Math. Phys. 55 (5), 848–873 (2015)].
A. M. Blokhin, D. L. Tkachev, and A. V. Egitov, “Asymptotics of the Spectrum of a Linearized Problem of the Stability of a Stationary Flow of an Incompressible Polymer Fluid with a Space Charge,” Zh. Vychisl. Mat. Mat. Fiz. 58 (1), 108–123 (2018). [Comput. Math. Math. Phys. 58 (1), 102–117 (2018)].
A. Blokhin, D. Tkachev, and A. Yegitov, “Spectral Asymptotics of a Linearized Problem for an Incompressible Weakly Conducting Polymeric Fluid,” Z. Angrew. Math. Mech. 98 (4), 589–601 (2018).
A. Blokhin and D. Tkachev, “Linear Asymptotic Instability of a Stationary Flow of a Polymeric Medium in a Plane Channel in the Case of Periodic Perturbations,” Sibir. Zh. Indust. Mat. 17 (3), 13–25 (2014) [J. Appl. Ind. Math.8 (4), 467–478 (2014)].
A. Blokhin and D. Tkachev, “Spectral Asymptotics of a Linearized Problem about Flow of an Incompressible Polymeric Fluid. Base Flow Is an Analog of a Poiseuille Flow,” AIP Conf. Proc. 2017 (030028), 1–7 (2018).
A. M. Blokhin and D. L. Tkachev, “Analogue of the Poiseuille Flow for Incompressible Polymeric Fluid with Volume Charge. Asymptotics of the Linearized Problem Spectrum,” IOP Conf. Series: J. Physics: Conf. Ser. 894 (012096), 1–6 (2017).
A. M. Blokhin, D. L. Tkachev, and A. V. Egitov, “An Asymptotic Formula for the Spectrum of a Linear Problem Describing Periodic Flows of a Polymeric Fluid in an Infinite Plane Channel,” Prikl. Mat. i Tekhn. Fiz. 59 (6), 39–51 (2018).
E. Grenier, Y. Guo, and T. T. Nguyen, “Spectral Instability of Characteristic Boundary Layer Flows,” Duke Math. J. 165 (16), 3085–3146 (2016).
L. I. Sedov, Mechanics of Continuous Media (Nauka, Moscow, 1970; World Scientific, 1997).
L. G. Loitsyanskii, Mechanics of Liquids and Gases (Stewartson Pergamon Press, Oxford, 1966; Nauka, Moscow, 1978).
A. B. Vatazhin, G. A. Lyubimov, and S. A. Regirer, Magnetic Hydrodynamical Flows in Channels (Nauka, Moscow, 1970) [in Russian].
I. Bai-Shi, Introduction to Theory of Compressible Fluid Flow (Izd. Inostrannaya Literatura, Moscow, 1962) [in Russian].
A. M. Blokhin and R. E. Semenko, “Steady Hydrodynamical Flows of Nonisothermic Incompressible Polymeric Fluid in a Flat Channel,” Vestnik Yuzhno-Ural. Gos. Univ. Ser. Mat. Model. Program. 11 (4), 41–54 (2018).
Y. Shibata, “On the R-Boundedness for the Two Phase Problem with Phase Transition: Compressible–Incompressible Model Problem,” Funkcialay Ekvacioj. 59, 243–287 (2016).
A. M. Blokhin and D. L. Tkachev, “Stability of Poiseuille-Type Flows for an MHD Model of an Incompressible Polymeric Fluid,” J. Hyperbolic Diff. Equations. 4 (4), 1–25 (2019).
A. M. Blokhin, D. L. Tkachev, and A. V. Egitov, “Stability of the Poiseuille-Type Models for a MHD Model of an Incompressible Polymeric Fluid,” Prikl. Mat. Mekh. 83 (5–6), 779–789 (2019).
A. M. Blokhin and D. L. Tkachev, “Stability of the Poiseuille-Type Flow for a MHD Model of an Incompressible Polymeric Fluid,” European J. Mech. B: Fluids 80, 112–121 (2020).
A. I. Akhiezer and I. A. Akhiezer, Electromagnetism and Electromagnetic Waves (Vysshaya Shkola, Moscow, 1985) [in Russian].
K. Nordling and J. Österman, Physics Handbook for Science and Engineering (Studentlitteratur, Lund, 1999; BKhV-Peterburg, St. Petersburg, 2011).
L. D. Landau and E. M. Lifshits, Electrodynamic of Continuous Media (Fizmatlit, Moscow, 1959) [in Russian].
M. A. Lavrent’ev and B. V. Shabat, Methods of the Theory of Functions of a Complex Variable (Nauka, Moscow, 1973) [in Russian].
ACKNOWLEDGMENTS
The authors are grateful to A. V. Yegitov for help in designing the manuscript.
Funding
The authors were supported by the Russian Foundation for Basic Research (project no. 19–01–00261) and the Siberian Branch of the Russian Academy of Sciences (the Program of Basic Research No. I.1.5, project 0314–2019–0013).
Author information
Authors and Affiliations
Corresponding authors
Additional information
Translated by G.A. Chumakov
Rights and permissions
About this article

Cite this article
Blokhin, A.M., Rudometova, A.S. & Tkachev, D.L. An MHD Model of an Incompressible Polymeric Fluid: Linear Instability of a Steady State. J. Appl. Ind. Math. 14, 430–442 (2020). https://doi.org/10.1134/S1990478920030035
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1990478920030035