
Abstract—
The inner (or satellite) version of the restricted elliptic three-body problem is considered. The terms up to the fourth order inclusive in small parameter are retained in the expansion of the perturbing function for the problem. The ratio of the orbital semimajor axes of perturbed and perturbing bodies is such a parameter, while their mean longitudes are the fastest variables. The Gauss scheme of independent double averaging over fast variables is used to analyze the orbital evolution of a body of negligible mass. Explicit analytical expressions for the doubly averaged perturbing function and its derivatives with respect to the elements on the right-hand sides of the evolution equations are presented. The integrable cases of the doubly averaged problem are studied in detail: planar and orthogonal apsidal orbits. The evolution system is numerically integrated in the general (nonintegrable) case for some special values of the problem parameters and initial conditions, in particular, for a set of orbital elements in which the so-called “flips”, i.e., transitions of the orbit from prograde to retrograde and vice versa, manifest themselves. In the Sun–Jupiter–asteroid model using some special asteroid orbits as an example, we show the influence of the retained fourth-order terms and the ellipticity of Jupiter’s orbit on their evolution.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
INTRODUCTION AND FORMULATION OF THE PROBLEM
The averaged problems of celestial mechanics are both the subject of independent analytical and numerical research and one of the methodological foundations for studying the dynamics of real astronomical objects on long time scales. Various averaged schemes of the three-body problem, both general and restricted ones, are of special interest. The so-called Gauss scheme of independently averaging the force function of the problem over the two fastest variables, i.e., the mean longitudes of perturbing and perturbed bodies when their mean motions are incommensurable, is particularly prominent. N.D. Moiseev obtained a complete system of independent first integrals of the averaged (evolution) equations in elements in the restricted problem for a circular orbit of the perturbing body relative to the central one (Moiseev, 1945). Qualitative and analytical studies of the evolution equations were carried out by M.L. Lidov for the satellite version of the problem, when only the second-order terms are retained in the expansion of the perturbing function in powers of the small parameter α (the ratio of the semimajor axes of perturbed and perturbing bodies) (Lidov, 1961). Almost concurrently, Kozai investigated the asteroid version of the problem by including the terms ~α8 inclusive (Kozai, 1962). Apart from applications to the dynamics of satellites of planets and asteroids, these authors revealed the fall of a body of infinitesimal mass to a central body if its orbit is highly inclined to the orbital plane of the perturbing body. The monograph by I.I. Shevchenko (2017) is devoted to describing this effect called the Lidov–Kozai effect, along with its astrophysical applications. The paper by Ito (2016), where the doubly averaged perturbing function of the restricted circular three-body problem was expanded up α14 inclusive for the inner version (α < 1) and up to α–15 inclusive for the outer version (α > 1), served as an elaboration of the study by Kozai (1962). Undoubtedly, a misprint in the last row of Eq. (33) from the Ito’s paper should be noted.
A natural generalization of the evolution three-body problem is its elaboration to the more realistic case where the orbit of a perturbing body is noncircular. The corresponding doubly averaged restricted elliptic problem has only a few integrable cases (Vashkov’yak, 1984) and is generally nonintegrable. Nevertheless, the Lidov–Kozai effect also manifests itself in this problem and, as a consequence, a new qualitative feature arises—highly eccentric orbits that change their type from prograde to retrograde and vice versa during their evolution. This phenomenon, which is related to the passage of the orbital inclination through 90° and was discovered by Katz et al. (2011) and Naoz et al. (2011), was called a “flip”. Quite a few papers are devoted to this phenomenon in the doubly averaged elliptic three-body problem (both general and restricted ones) with applications to the dynamics of exoplanets, triple star systems, and small bodies of the Solar system. Their extensive bibliography is contained in the already mentioned book by Shevchenko (2017). Among the recent works we will point out the papers by Naoz (2016) and Sidorenko (2018) devoted to the “eccentric Kozai–Lidov effect”.
In this paper we obtain a special form of the expansion of the doubly averaged perturbing function for the restricted elliptic three-body problem up to α4 inclusive (in particular, the terms ~α4 contain the square of the orbital eccentricity of a perturbing body). We consider the integrable cases of the problem in more detail and numerically integrate the evolution system with initial data corresponding to both a flip orbit and a stable equilibrium solution of the corresponding planar elliptic problem. In addition, we perform numerical calculations showing that including the terms ~α4 is necessary when analyzing the evolution of special asteroid orbits, in particular, a series of orbits of numbered asteroids with libration of the argument of perihelion: nos. 143 219, 159 518, 417 444, and 1866.
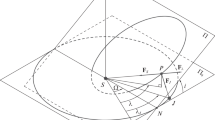
Consider the motion of a particle Р of negligible mass under the attraction of a central point S of mass m and a perturbing point J of mass m1 ⪡ m moving relative to S in an elliptical orbit with a semimajor axis а1 and eccentricity е1. Let us introduce a rectangular coordinate system Oxyz with the origin at point S whose reference plane xOy coincides with the orbital plane of point J. Let the Ox axis be directed to the pericenter of the orbit of point J, the Oy axis be in the direction of its motion from the pericenter in the reference plane, and the Oz axis complements the coordinate system to a right-handed one. The perturbed orbit of point Р is characterized by osculating Keplerian elements: the semimajor axis а, the eccentricity е, the inclination i, the argument of pericenter ω, and the longitude of the ascending node Ω. The inner version of the problem suggests that the apocenter distance of point Р during the evolution of its orbit does not exceed the pericenter distance of the perturbing point J, i.e.,
As a rule, the secular part W of the complete perturbing function is used to investigate the orbital evolution of point Р:
Here, in addition to the already introduced notation for the orbital elements, f is the gravitational constant, Δ is the distance between the perturbed and perturbing points Р and J, λ and λ1 are the mean longitudes of these points, respectively. The procedure of such (independent) double averaging over fast variables is called the Gauss scheme, in which the absence of low-order commensurabilities between the mean motions of points J and Р is assumed. As a consequence, the first integrals of the equations of perturbed motion in elements appear in the doubly averaged problem,

while one more first integral (1 – e2)cos2i = const exists in the case of е1 = 0 (Moiseev, 1945). In the function Wа1 and е1, along with а, play the role of parameters in the evolution problem.
A SPECIAL EXPRESSION FOR THE AVERAGED PERTURBING FUNCTION OF THE SATELLITE VERSION OF THE PROBLEM AND EVOLUTION EQUATIONS
Another equivalent expression for the function W via well-known formulas is also commonly used in analytical studies:
Here, Е is the eccentric anomaly of the perturbed point, ν1 is the true anomaly of the perturbing point, r1 = a1 (1 – e12)/(1 + e1 cos ν1), and V is the force function of the elliptical Gaussian ring simulating the averaged influence of point J. In what follows, the so-called inner or satellite version of the problem will be considered by assuming r ⪡ r1, while the terms up to the fourth order inclusive will be retained in the expansion of the function 1/Δ in Legendre polynomials Pn (or in powers of the ratio r/r1), so that
Performing the standard integration procedure in (3), we obtain an explicit expression for the function V:
where x, y, r are expressed via the eccentric anomaly Е using the well-known formulas for unperturbed elliptical Keplerian motion. Performing a similar integration procedure, we obtain the function W.
In the adopted approximation with respect to α the expression for the function W is given in Yokoyama et al. (2003). However, all of the subsequent results referring to the stability of Jupiter’s outer satellites were obtained for the resonant part of the function W containing only the terms ∼cos(Ω ± ω) and ∼cos2(Ω ± ω). In contrast to the expression given in this paper, in the following more compact formulas we directly separate out the dependence of W on the longitude of the ascending node Ω (it is this dependence that is an obstacle to the integrability of the doubly averaged restricted elliptic three-body problem):
Here, the coefficients А0, 1, 2 and В1, 2 dependent on the elements e, i, ω and independent of Ω are defined by the formulas
The function w1 contains factor e and is multiplied by the value proportional to е1, while the function w2 contains the terms of the zeroth and second order in е1.
Below, it is convenient to introduce a new independent variable, a “dimensionless time” τ, according to the formula
where \(n = \frac{{\sqrt {fm} }}{{{{a}^{{{3 \mathord{\left/ {\vphantom {3 2}} \right. \kern-0em} 2}}}}}}\) is the mean motion of point Р.
To describe the evolution of orbits, we will use the Lagrange equations in elements with the function w that is their first (and generally unique) integral:
For arbitrary orbits of point Р and е1 > 0 a rigorous solution of Eqs. (8) can be apparently found only by a numerical method for specified initial conditions, while the process of calculations can be controlled by the constancy of the function w along this solution. For completeness of the set of formulas, we provide expressions for the derivatives of w0, w1, and w2 in elements. They are needed to calculate the right parts of the evolution equations.
The derivatives of the function w0 are
The derivatives of the function w1 are
The derivatives of the function w2 are
INTEGRABLE CASES OF THE ELLIPTIC PROBLEM
Planar Orbits
If sin i = 0, then the orbit of point Р is always located in the reference coordinate plane \(\left( {\frac{{di}}{{d\tau }} = 0} \right),\) while the evolution equations are simplified. With the introduction of the longitude of periastron of point Р
where δ = sign(cos i), the evolution system takes the form
In this case, it is obvious that the prograde (δ = 1) and retrograde (δ = –1) orbits evolve identically with time inversion, while the existence of the first integral
makes the planar evolution problem integrable as a system with one degree of freedom.
The integrability of this (planar) version of the doubly averaged restricted elliptic problem was first established by E.P. Aksenov for B = 0, where the terms ~α4 and higher are disregarded in the expansion of the function W. A qualitative study of the problem was carried out in Aksenov (1979a), while the quadratures were analytically inverted and the time dependences of the orbital elements were obtained in Aksenov (1979b). E.P. Aksenov’s studies were elaborated by Veresh (1980a; 1980b; 1980c) in terms of both a qualitative analysis of the problem and the construction of its approximate analytical solution for α < 1. Subsequently, Vashkov’yak (1982) investigated the planar case of the problem for arbitrary α using a numerical-analytical method, which envisaged a numerical calculation of the function W and an analytical determination of the function V in Eqs. (2). In what follows, the results of these papers will be used and, where possible, the notation introduced in them will be retained.
Our goal is to derive refined quantitative evolution characteristics compared to the case of B = 0 and a more detailed qualitative study of the problem for B > 0 than that performed in Veresh (1980a).
From Eqs. (5) at sin i = 0 we obtain
and Eqs. (10) take the form
At fixed parameters α and е1 the integral (12) defines an h-family of integral curves in the (g, e) plane. For А = 0.1 and В = 0 Aksenov (1979a) constructed such a family, studied in detail its qualitative structure, found the stationary values of the variables e*, g* = 0, and revealed three possible types of phase trajectories: I—libration of both variables е and g; II— libration of е and circulation of g; III—degeneracy of trajectories, when the phase point reaches a boundary value of е = 1 in a finite time as g changes monotonically, which at a = const corresponds to the collision of point Р with the central point S. For α = 0.5 and е1 = 0.3 Veresh (1980a) constructed similar families for both В = 0 (E.P. Aksenov’s solution) and В > 0. In this case, it was established that including the terms of higher orders in α does not change the qualitative structure of the families of integral curves, does not give rise to any new types of phase trajectories, but affects only their quantitative characteristics.
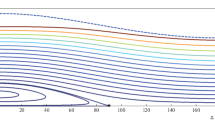
For completeness, we provide here the h-families of integral curves (12) for α = 0.24, e1 = 0.5, A = 0.1, B = 0.024 (Fig. 1), and B = 0 (Fig. 2).

The family of integral curves (12) in the (g, е) plane for α = 0.24, e1 = 0.5, A = 0.1, and B = 0.024 (F. Veresh’s solution).
In view of the existing symmetry of phase trajectories, only the regions 0° < g < 180° are shown. The open circles in the figures mark the stationary points (g = 0, e = e*) and the points (g = 0, e = es) and (g = 90°, e = 0) on the integral curves that bound the libration zones of the argument of pericenter. The filled circles mark the points (g = 0, e = 1) and (g = 90°, e = ес) on the separatrices separating the circulation regions from the regions corresponding to degenerate trajectories. The phase point moves along these curves in such a way that е → 1 as t → ±∞. As was also noted in Veresh (1980a), a comparison of Figs. 1 and 2 makes it possible to estimate the influence of the factor В on the quantitative characteristics of the family of phase trajectories for the problem. Below, such characteristics will be presented for a fairly wide domain of parameters α and е1.
The stationary solutions of system (13) are found by setting the right-hand sides of both equations equal to zero. From the first equation in (13) we have
It can be shown that for the last two equalities the right-hand side of the second equation in (13) is positive for any α, е1 and е ≠ 1. Therefore, for е < 1 the only stationary value of the variable g is
The stationary value of the eccentricity 0 < е* < 1 is found as the corresponding real root of the cubic equation
where
At В = 0 Eq. (16) is quadratic and the stationary value of the eccentricity is defined by one of its roots by the formula (Aksenov, 1979a)
Since А and В depend on the problem parameters α and е1, for clarity, it is natural to present the results of the solution of Eq. (16) in the form of a family of isolines е*(α, е1) = const (Fig. 3). The numerical values of е* are plotted vertically near the right ends of the thick lines. The corresponding dashed lines (В = 0) virtually coincide with the thick lines at small α. At α differing noticeably from zero the solid and dashed lines diverge, which gives an estimate of the influence of the terms ~α4 in the expansion of the averaged perturbing function on е*. In particular, for the parameters α = 0.24 and e1 = 0.5 adopted when constructing the families in Figs. 1 and 2, е* ≈ 0.155 and 0.230, respectively.

Same as Fig. 1, but for В = 0 (E.P. Aksenov’s solution).

The family of isolines of the stationary values for the eccentricity е*(α, е1) = const (the solution for В > 0—the thick lines; the solution for В = 0—the dashed lines).
In the domain of parameters α and е1 under consideration the values of е* are relatively small and do not exceed about 0.2.
Remark. Going beyond the planar integrable case, we will note the recent paper by Neishtadt et al. (2018), where the spatial stability of stationary solutions was investigated in the linear approximation in i. It is also pointed out that the KAM theory guarantees the Lyapunov stability of stationary solutions for all values of the parameters in the α, e1 plane, except, possibly, for the parameters belonging to some finite set of analytical curves.
The families еs(α, е1) = const (Fig. 4) and ес(α, е1) = const (Fig. 5), which characterize the sizes of the libration and circulation zones, are constructed similarly to the family of isolines for е*.

Same as Fig. 3, but for еs(α, е1) = const.

Same as Fig. 3, but for еc(α, е1) = const.
The following equations serve to determine еs and ес, respectively:
In Eq. (20)hc is defined by the formula
For the parameters α = 0.24 and e1 = 0.5 adopted when constructing the families in Figs. 1 and 2, еs ≈ 0.32 and 0.48, respectively, while ес ≈ 0.595 and 0.370, respectively.
In addition to the above special values of the eccentricity, finding its extreme values for each of the characteristic ranges of the constant h of the integral (12) is of interest. As our analysis shows, h can vary within the range
Here, e* is the stationary value of the eccentricity, еs is its value at g = 0, and ес is its minimum value at g = π/2 corresponding to the circulation of g, whereby е(g = 0) = 1.
From the known е* for В > 0 it is easy to find
which corresponds to the stationary solution. The remaining special values in the system of inequalities (22) are defined as
and by Eq. (21) for hc.
The types of phase trajectories revealed by E.P. Aksenov at В = 0 (Aksenov, 1979b) are also retained for B > 0, but their extreme characteristics undergo changes. Figures 6 and 7 present the h dependences of the extreme values of the eccentricity constructed at α = 0.24, e1 = 0.5, and А = 0.1 for В = 0.024 and В = 0, respectively. The Roman numerals mark three regions with different types of change in elements.

Extreme values of the eccentricity versus h for α = 0.24, e1 = 0.5, А = 0.1, and В = 0.024.

Same as Fig. 6, but for В = 0 (E.P. Aksenov’s solution).
For region I (h* ≤ h < 0, the libration of е and g) the extreme values of the eccentricity 0 < еex < 1 are defined by the two positive roots of the quartic polynomial
For region II (0 < h < hc, the libration of е and the circulation of g) the minimum value of the eccentricity 0 < еmin < 1 is defined by the positive root of the polynomial
while its maximum value 0 < еmax < 1 is defined by the root of the polynomial (25), but with a different range of change in h.
Finally, for region III (degenerate trajectories, hc < h ≤ h**) the minimum value of the eccentricity 0 < еmin <1 is defined by the positive root of the polynomial (26).
The procedure for calculating the roots of polynomials is among the standard ones in many computing systems, in particular, in Matlab, while the choice of the necessary roots is straightforward. Furthermore, the above algebraic equations allow, if necessary, dependences similar to those in Figs. 1 and 6 to be constructed for any admissible values of the problem parameters α and е1.
It can be seen from a comparison of Figs. 6 and 7 presented on the same scale that our inclusion of the terms ∼α4 leads to a reduction in the extreme values of the eccentricity and allows their more accurate values differing significantly from those in the case of В = 0 to be obtained.
Orthogonal Apsidal Orbits
If cos i = 0 and sin Ω = 0, then the orbit of point Р is always orthogonal to the orbital plane of the perturbing point J\(\left( {{{{\text{d}}i} \mathord{\left/ {\vphantom {{{\text{d}}i} {{\text{d}}\tau }}} \right. \kern-0em} {{\text{d}}\tau }} = 0,\,\,{{{\text{d}}\Omega } \mathord{\left/ {\vphantom {{{\text{d}}\Omega } {{\text{d}}\tau }}} \right. \kern-0em} {{\text{d}}\tau }} = 0} \right).\) A general qualitative study of this case, including the possible intersections of the orbits of points Р and J, was carried out using a numerical-analytical method by Vashkov’yak (1984) for arbitrary α. Here, the satellite version of the problem is investigated with the derivation of more detailed quantitative evolution characteristics.
In the approximation under consideration the evolution equations (8) are also simplified and take the form
Here,
δ1 = sign(cosΩ), so that
At fixed parameters α and е1 the integral (28) defines an h-family of integral curves in the (ω, e) plane. One of these families for α = 0.3 and е1 = 0.4 is presented in Figs. 8 and 9 (for two ranges of eccentricities). For greater detail, Figs. 8 and 9 show the ranges 0 < e < 0.1 and 0.1 < e < 1, respectively. As in the well-known case of orthogonal orbits in the doubly averaged Hill problem, where е1 = 0 and α → 0 (В = 0) (Lidov, 1961; 1962), all phase trajectories intersect with the boundary straight line е = 1 in a finite time (except for the separatrices) and point Р collides with the central point S. A slight qualitative change is the appearance of a saddle stationary point at the boundary ω = 180°.

The family of integral curves (28) in the (ω, е) plane.

Same as Fig. 8, but for 0.1 < e < 1.
In view of the existing symmetry of phase trajectories, Figs. 8 and 9 also show only the regions 0° < ω < 180°. The open circles in the figures mark the boundary points of the singular integral curves (ω = 90°, e = 0). The filled circles mark the points (ω = 180°, e = е*) on the separatrices. The phase point moves along these curves in such a way that е → 1 as t → ±∞.
The stationary solutions of system (29), or the singular points in the (ω, е) phase plane, are found by setting the right-hand sides of both equations equal to zero. In general, the existence of singular points within the rectangular region under consideration is not ruled out at arbitrary values of the constants А and В. Their coordinates can satisfy the system of two equations derived by setting the expressions in braces (29) equal to zero. However, here we consider only the solutions sin ω = 0 following from the first equation in (29), i.e.,
The stationary value of the eccentricity 0 < е* < 1 is found as the corresponding real root of the cubic equation
where
At В = 0 Eq. (31) is quadratic and its solution is given in Vashkov’yak (1984):
The solution satisfying the condition 0 < e* < 1 exists only at δ1δ2 < 0, i.e.,
This corresponds to the opposite directions of motion of point Р, with the stationary value in both cases being g* = Ω + ω* = π.
For the general case of В > 0 the isolines е*(α, е1) = const are shown in Fig. 10. The numerical values of е* are plotted vertically near the right ends of the thick lines. The corresponding dashed lines virtually coincide with the thick ones at small α. At α differing noticeably from zero the solid and dashed lines diverge. This gives an estimate of the influence of the terms ~α4 in the expansion of the averaged perturbing function, which were included in this paper, on е*.

The family of isolines of the stationary values for the eccentricity е*(α, е1) = const (the solution for В > 0—the thick lines; the solution for В = 0—the dashed lines).
In the domain of parameters α and е1 under consideration the values of е* are relatively small and do not exceed about 0.2.
NUMERICAL SOLUTION OF THE EVOLUTION SYSTEM
Model Examples
In this section we present the results of our numerical solution of Eqs. (8) in the model of a system that includes the Sun—a central attracting point and one main perturbing point—Jupiter (а1 = 5.2 AU, е1= 0.048). Our calculations were performed with various initial data for a series of evolving orbits of hypothetical and real asteroids.
As one of the test model examples for demonstrating a “flip” (a well-known phenomenon that takes place in the restricted elliptic doubly averaged three-body problem and that consists in the transition of an asteroid orbit during its evolution from prograde to retrograde and vice versa), we consider an orbit with a semimajor axis а =2.2 AU and initial elements е0 = 0.15, i0= 75°, ω0 = 0. This orbit, which is highly inclined to the reference plane, to a certain extent is close to the one in Naoz et al. (2013), in which, however, no initial longitude of the ascending node is specified. It is well known that flips can exist only in some domain of initial orbital elements. Lithwick and Naoz (2011) constructed the boundaries of these domains in the (е0, cosi0) plane for fixed values of the small parameter ε = 8A/5 numerically. In particular, Sidorenko (2018) proposed a satisfactory asymptotic approximation for the analytical fit of these boundaries in the case of ε ≤ 0.1.
In the example given here Ω0 = 120° was chosen in a special way, while Fig. 11 shows the time dependences of the inclination and the quantity log(1–e) (convenient for a graphical representation instead of е) in a time interval of 3 Myr.

Time variations of the inclination and eccentricity of an orbit with initial elements а = 2.2 AU, е0 = 0.15, i0= 75°, ω0 = 0, and Ω0 = 120°.
As the orbital inclination approaches 90° (the dashed straight line in the upper panel of Fig. 11), the eccentricity becomes very close to one. In reality, given the Sun’s nonzero radius, this, of course, would lead to the fall of an asteroid to its “surface” already at t ≈ 0.4 Myr (the first intersection of the dashed straight line with the graph in the lower panel of Fig. 11). Interestingly, a fairly subtle flip effect is detected even when using one of the simplest numerical integration methods (in this paper the fourth-order Runge–Kutta method).
Tracing the transformation of the stable stationary solution in the planar integrable case of the problem with initial conditions е0= е*(α, е1), i0= 0, and g0= g* = 0 as i0 increases serves as another model example. For this purpose, we numerically integrated system (8) for the adopted constant parameters а1, е1, а = 2.2 AU. (α = 0.423), е0 =0.019 and initial angular elements ω0 = Ω0 = 0. The results of these calculations are illustrated by Table 1, where the extreme values of the elements in a time interval of 1 Myr are presented. At initial inclinations no greater than about 32°.7 the argument of pericenter and the longitude of the ascending node circulate, while the elements e, i, and g librate, although the oscillation amplitude of g can approach 180°, with the minimum values of the eccentricity and the maximum values of the inclination being fairly close to the initial ones. For i0 ≥ 33° both variables g and ω change monotonically with time, but the oscillation amplitudes of the eccentricity and inclination increase significantly. Such trends are also typical for the circular doubly averaged problem (Lidov, 1961; 1962; Kozai, 1962). They are retained at inclinations that are not too close to 90°. In the elliptic problem for this example, flips where the inclination passes through 90° (its maximum values are about 147°) and the eccentricity reaches a value very close to one begin to manifest themselves starting from i0 = 76°. Interestingly, as our calculations show, there are no flips for the slightly smaller i0 = 75°, at least in an interval of 5 Myr.
Thus, for the chosen values of the parameters а1 and е1 the data in Table 1 allow us to trace the qualitative changes of the “asteroid” orbit as its initial inclination changes. This orbit ultimately turns into a highly evolving one in eccentricity and inclination with its passage through 90° starting from the stationary position in the plane of motion of the perturbing body at a low eccentricity.
On the Evolution of Some Special Asteroid Orbits
In the problem of the evolution of asteroid orbits the influence of Jupiter’s orbital eccentricity is usually a secondary factor, as is the influence of the terms of the perturbing function with an order higher than α2. Nevertheless, there exist orbits of real asteroids that absolutely require taking into account these factors for a proper description of their evolution. These include the asteroids with orbital elements satisfying some special conditions. These are primarily the orbits for which the constants of the first integrals of the doubly averaged Hill problem (Lidov, 1961; 1962)

satisfy the Lidov–Kozai resonance conditions с1 < 3/5 and c2 < 0. Skripnichenko and Kuznetsov (2018) provided a sample of 52 such numbered asteroids with ω-libration orbits. Interestingly, for three of them (143219, 159518, and 417444) the corresponding constants с2 are less than 10–3 in absolute value. This means that in the (ω–е) plane the phase point is very close to the separatrix separating the libration and circulation regions of the argument of perihelion. For such asteroids the simplified evolution model that disregards the terms ~α4 in the averaged perturbing function generally leads to incorrect quantitative and even qualitative results.
Table 2 gives the evolution characteristics of these orbits (along with the orbit of asteroid 1866) calculated by numerically integrating system (8) in a time interval of 1 Myr for two main cases: В = 0 (model ∼α3) and В > 0 (model ∼α4). The symbols characterizing the type of evolution of the argument of pericenter are given together with the extreme values of the eccentricity: С for circulation and L for libration. For asteroid 143219 including the terms ∼α4 refines only the range of eccentricities compared to the model ∼α3. However, for the remaining asteroids neglecting the terms ∼α4 additionally also leads to qualitative changes in the pattern of evolution of ω.
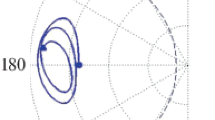
As an illustration, Figs. 12 and 13 show the variations in the orbital eccentricity and the argument of perihelion for the last asteroid 417444 in the models ∼α3 and ∼α4, respectively.

Variations of the orbital eccentricity and the argument of perihelion for asteroid 417444 in the simplified model ∼α3.

Same as Fig. 12, but for the model ∼α4.
In the plane of these elements in Fig. 12 the initial point marked in the figure by the filled circle initially passes from the regime of ω libration relative to 90° to the regime of its circulation (along the arrow) and then returns to the regime of libration, but already relative to 270°. In the more accurate model (Fig. 13) ω liberates relative to 90° in the entire time interval under consideration.
In conclusion, note some possibilities for the development of this study. Apart from tracing the spatial transformation of planar equilibrium satellite orbits, a numerical search for so-called periodically evolving orbits with equal (commensurable) periods of variations in all elements could be of interest. An examination of the outer version of the restricted elliptic doubly averaged three-body problem will also serve as a supplement to this study.
REFERENCES
Aksenov, E.P., The doubly-averaged elliptical restricted three-body problem, Sov. Astron., 1979a, vol. 56, no. 2, pp. 236–240.
Aksenov, E.P., Trajectories in the double-averaged elliptical restricted three-body problem, Sov. Astron., 1979b, vol. 56, no. 3, pp. 351–355.
Ito, T., High-order analytic expansion of disturbing function for doubly averaged circular restricted three-body problem, Adv. Astron., 2016, vol. 2016, art. ID 8945090.
Katz, B., Dong, S., and Malhotra, R., Long-term cycling of Kozai–Lidov cycles: Extreme eccentricities and inclinations excited by a distant eccentric perturber, Phys. Rev. Lett., 2011, vol. 107, art. ID 181101.
Kozai, Y., Secular perturbations of asteroids with high inclination and eccentricity, Astron. J., 1962, vol. 67, pp. 591–598.
Lidov, M.L., The evolution of the orbits of artificial planetary satellites affected by gravitational perturbations of external bodies, Iskusstv. Sputniki Zemli, 1961, no. 8, pp. 5–45.
Lidov, M.L., The evolution of orbits of artificial satellites of planets under the action of gravitational perturbations of external bodies, Planet. Space Sci., 1962, vol. 9, pp. 719–759.
Lithwick, Y. and Naos, S., The eccentric Kozai mechanism for a test particle, Astrophys. J., 2011, vol. 742, p. 94.
Moiseev, N.D., General simplified schemes of celestial mechanics obtained by averaging of a limited circular problem of three points. 2. Averaged variants of the spatial limited circular problem of three points, Tr. Gos. Astron. Inst.im.P.K. Shternberga, 1945, vol. 15, no. 1, pp. 100–117.
Naoz, S., The eccentric Kozai–Lidov effect and its applications, Annu. Rev. Astron. Astrophys., 2016, vol. 54, pp. 441–489.
Naoz, S., Farr, W.M., Lithwick, Y., Rasio, F.A., and Teyssandier, J., Hot Jupiter from secular planet-planet interaction, Nature, 2011, vol. 473, pp. 187–189.
Naoz, S., Farr, W. M., Lithwick, Y., Rasio, F.A., and Teyssandier, J., Secular dynamics in hierarchical three-body systems, Mon. Not. R. Astron. Soc., 2013, vol. 431, pp. 2155–2171. https://doi.org/10.1093/mnras/stt302
Neishtadt, A.I., Sheng, K., and Sidorenko, V.V., On stability of planar solution of double averaged restricted elliptic three-body problem, 2018. arXiv:1803.08847.
Shevchenko, I., The Lidov-Kozai Effect—Applications in Exoplanet Research and Dynamical Astronomy, Astrophysics and Space Science Library Series vol. 441, Dordrecht: Springer-Verlag, 2017.
Sidorenko, V.V., The eccentric Kozai–Lidov effect as a resonance phenomenon, Celest. Mech. Dyn. Astron., 2018. 130:4, pp. 2–23.
Skripnichenko, P.V. and Kuznetsov, E.D., Investigation of dynamical evolution of asteroids due to the Lidov–Kozai effect, Izv. Gl. Astron. Obs. Pulkove, 2018, no. 225, pp. 217–222.
Vashkov’yak, M.A., Evolution of orbits in the two-dimensional restricted elliptical twice-averaged three-body problem, Cosmic Research, 1982, vol. 20, no. 3, pp. 236–244.
Vashkov’yak, M.A., Integrable cases of the restricted twice-averaged three-body problem, Cosmic Research, 1984, vol. 22, no. 3, pp. 260–267.
Veresh, F., A qualitative analysis of a plane averaged restricted three-body problem, Sov. Astron., 1980a, vol. 57, pp. 107–111.
Veresh, F., Analytical solution of the plane averaged restricted three-body problem in the case of circulation of the pericenter of the orbit of the particle, Sov. Astron., 1980b, vol. 57, pp. 474–478.
Veresh, F., Two particular types of solution of for the plane averaged restricted three-body problem, Sov. Astron., 1980c, vol. 57, pp. 614–617.
Yokoyama, T., Santos, M.T., Cardini, G., and Winter, O.C., On the orbits of the outer satellites of Jupiter, Astron. Astrophys., 2003, vol. 401, pp. 763–772.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by V. Astakhov
Rights and permissions
About this article

Cite this article
Vashkov’yak, M.A. Some Peculiarities of the Evolution of Orbits in the Satellite Restricted Elliptic Doubly Averaged Three-Body Problem. Sol Syst Res 54, 49–63 (2020). https://doi.org/10.1134/S0038094620010098
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0038094620010098