
Abstract
The main object of the present work is the study of a new Timoshenko beam model with thermal and mass diffusion effects where the coupling is acting on the shear force. We prove the well-posedness of the system using the semigroup theory. Furthermore, we establish that the system is exponentially stable if and only if the wave speeds of the system are equal. When the speeds of the mechanical waves are different, we show a lack of exponential stability. Additionally, in the case of different wave speeds, we show that the solution decays polynomially.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
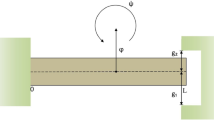
In 1921, Timoshenko [32] introduced the so-called Timoshenko model describing the transverse vibrations of a beam, it is given by the following system of coupled hyperbolic equations
where \( \varphi \) denotes the transverse displacement of the beam and \( \psi \) is the rotation angle of the filament of the beam. \( \rho _{1}, \rho _{2}, k \) and b stands for \( \rho _{1} = \rho A \), \( \rho _{2} = \rho I \), \( k = k^{'} A G \) and \( b = E I \) such that \( \rho \) is the density, A is the cross-sectional area, I is the second moment of area of the cross-sectional area, \( k^{'} \) is the shear coefficient, G is the modulus of rigidity and E is the Young’s modulus of elasticity. t is the time variable and x is the space variable along the beam of length L.
Soufyane [30] studied system (1) with a single weak damping in the second equation and demonstrated exponential stability result provided the mechanical wave velocities are equal. i.e,
A vital aspect of research concerning system (1) is to search for a minimal dissipation by which solutions to the system decay exponentially. In this regards, various types of damping mechanisms, such as internal or boundary feedback, finite or infinite memory and Kelvin Voigt dissipation have been used to stabilize the system, see for example [4, 20, 21, 24, 26, 31].
Muñoz Rivera et al. [25] analyzed the following thermoelastic Timoshenko system
where \( \theta \) represents the temperature difference, the coefficients \( \rho _{3}, \kappa \) and \( \gamma \) denote the physical parameters from thermoelasticity theory which are positive. The dissipation in the system is through thermal damping on the bending moment equation. The authors established an exponential stability result for (3) provided assumption (2) holds. Recently, in [1], Almeida Júnior et al. proposed a new coupling to thermoelastic Timoshenko beam where the thermoelastic coupling acts on shear force
The authors proved that the system is exponentially stable if and only if the wave speeds are equal. For more results on Timoshenko systems with thermal effects affecting on shear force, we refer the reader to [3, 9, 13, 14]. We should mention that the coupling of Timoshenko beam with thermal effects on both the shear force and the bending moment leads to an exponential stability irrespective of any relationship among the coefficients. This has been independently established by Alves et al. [2] and Djellali et al. [11].
Lately, Aouadi et al. [7] introduced a new Timoshenko beam model with thermal and mass diffusion effects given by
and proved an exponential decay result for system (5) with Dirichlet boundary conditions after adding a frictional damping term to the first equation. However, Feng [17] considered system (5) and proved the exponential stability provided \( \frac{\rho _{1}}{k} = \frac{\rho _{2}}{\alpha } \). We cite [5, 6, 8, 10, 15, 18, 29] for some other related results.
Motivated by the above results, we intend to study a Timoshenko system where the mass diffusion is taken into account, the evolution equations are given by
here, S denotes the shear force, M is the bending moment, \( \Psi \) is the entropy, q is the heat flux, \( \eta \) is the mass diffusion flux and C is the concentration of the diffusive material in the elastic body. The constitutive equations with temperature and mass diffusion following the Fourier’s law and the Fick’s law respectively, are given by
where P is the chemical potential, \( \varpi \) is a measure of the thermodiffusion effect, \( h > 0 \) is the diffusion coefficient and \( \varrho \) is a measure of the diffusive effect. By inserting (7) into (6), we obtain
As in [7], we shall formulate a different alternative form where the chemical potential P is considered as a state variable instead of the concentration C. This alternative form can be written by inserting the last equation of (7), i.e.
into (8). So, we get the following Timoshenko system with temperature and chemical potential in the classical form
where
are physical positive constants. We study system (9) with the following initial conditions
and boundary conditions
To stabilize the system when diffusion effects are added to thermal effects, we assume that the physical constants c, r and d satisfy
Our aim in this work, is to prove that system (9)–(11) is exponentially stable provided
In order to be able to use Poincaré’s inequality for \( \varphi \), using (9)\(_{1} \) and boundary conditions, we have
using initial data of \( \varphi \) and solving (14), we get
Consequently, if we set
we obtain
Clearly, the use of Poincaré’s inequality for \( \overline{\varphi } \) is justified. In addition \( \left( \overline{\varphi }, \psi , \theta , P \right) \) satisfies system (9)–(11). Henceforth, we work with \( \overline{\varphi } \) instead of \( \varphi \) but we write \( \varphi \) for simplicity of notations.
The rest of the paper is organized as follows. In the next Section, we prove the well-posedness of system (9)–(11). In Sect. 3, we show the lack of exponential stability under the condition of different wave speeds. The exponential stability for (9)–(11) in case of equal wave speeds condition will be established in Sect. 4. Section 5 is dedicated to the optimal polynomial stability result. Finally, some general remarks and open problem are highlighted in Sect. 6.
2 Well posedness
In this section, we discuss the well-posedness of the problem (9)–(11) using the semigroup theory. So, if we denote \( U = \left( \varphi , u, \psi , v, \theta , P \right) ^{T} \), where \( u = \varphi _{t} \), and \( v = \psi _{t} \). Then, system (9)–(11) is equivalent to
where the operator \( {\mathcal {A}} \) is defined by
We consider the following spaces
and let the space
endowed with the inner product
for any \( U = {\Big (} \varphi , u, \psi , v, \theta , P {\Big )}^{T} \in {\mathcal {H}} \) and \( {\tilde{U}} = \left( \tilde{\varphi }, {\tilde{u}}, \tilde{\psi }, {\tilde{v}}, \tilde{\theta }, {\tilde{P}} \right) ^{T} \in {\mathcal {H}} \).
The domain of the operator \( {\mathcal {A}} \) is given by
Clearly \( \mathcal {D(A)} \) is dense in \( {\mathcal {H}} \). Hence, from the inner product (16), we have
Integrating by parts, and after several simplifications we obtain
which implies that \( {\mathcal {A}} \) is dissipative in \( {\mathcal {H}} \). Now, by using Lax–Milgram lemma and classical regularity arguments, it can easily be shown that the operator \( ( I - {\mathcal {A}} ) \) is surjective. So, by using Lumer phillips theorem (see [23, 27]), we deduce that \( {\mathcal {A}} \) is an infinitesimal generator of a linear \( C_{0} \)-semigroup on \( {\mathcal {H}} \). Therefore, we have the following well-posedness result for the problem (9)–(11).
Theorem 2.1
Let \( U_{0} \in {\mathcal {H}} \). Then problem (9)–(11) has a unique weak solution \( U \in C({\mathbb {R}}^{+}, {\mathcal {H}}) \). Moreover, if \( U_{0} \in \mathcal {D(A)} \), then the solution U is classical solution satisfies \( U \in C({\mathbb {R}}^{+}, \mathcal {D(A)}) \cap C^{1} ({\mathbb {R}}^{+}, {\mathcal {H}}) \).
3 Lack of exponential stability
In this section, we prove the lack of exponential stability of system (9)–(11). The method we use here is based on the following Gearhart–Herbst–Prüss–Huang theorem to dissipative systems (see [19, 22, 28]).
Theorem 3.1
Let \( S(t) = e^{{\mathcal {A}}t} \) be a \( C_{0}-\)semigroup of contractions on Hilbert space \( {\mathcal {H}} \). Then, S(t) is exponentially stable if and only if
where \( \varrho ({\mathcal {A}}) \) is the resolvent set of the differential operator \( {\mathcal {A}} \), and \( {\big \Vert } \cdot {\big \Vert }_{{\mathscr {L}}({\mathcal {H}})} \) denotes the norm in the space of continuous linear functions in \( {\mathcal {H}} \).
Next, we state the main result of this section, as follows
Theorem 3.2
Let us suppose that
then the semigroup associated with system (9)–(11) is not exponentially stable.
Proof
We need to show that there exists a sequence of real number \( \lambda _{\mu } \) and functions \( G_{\mu } \in {\mathcal {H}} \), with \( \Vert G_{\mu } \Vert _{{\mathcal {H}}} \le 1 \) such that
where
with \( U_{\mu } = \left( \varphi , u, \psi , v, \theta , P \right) ^{T} \) not bounded.
By taking \( G_{\mu } = \left( 0, 0, 0, \frac{1}{\rho _{2}} \sin \left( \frac{\mu \pi }{L} x \right) ,0, 0 \right) \) and rewriting the spectral equation (18) in terms of its components, we obtain
Inserting u and v from the first and the third equations of (19) in the other equations, we get
Looking for solutions (compatible with the boundary conditions) of the form
Consequently, we arrive at
Now, taking \( \lambda \equiv \lambda _{\mu } \) such that
then, system (21) is equivalent to
where
Solving (22), we have
So,
with \( {\tilde{A}}_{\mu } \) defined as
which implies that
Similarly, we get
where
and
Therefore, as \( \mu \longrightarrow \infty \), one gets the convergences
Thus,
So we have no exponential stability. \(\square \)
4 Exponential stability
In this section, we use the energy method to prove that system (9)–(11) is exponentially stable. For this purpose, we need to state and prove some technical lemmas.
Lemma 4.1
Let \( \left( \varphi , \psi , \theta , P \right) \) be a solution of (9)–(11), then the energy functional defined by
satisfies
Proof
Multiplying the equations of system (9) by \( \varphi _{t}, \, \psi _{t},\, \theta \) and P respectively, integrating over (0, L) , using integration by parts and boundary conditions (11), we establish (25). \(\square \)
Remark 1
The energy E(t) defined by (24) is non-negative. In fact, we can easily show that
So, by using (12), we arrive at
where \( c_{1} = \frac{1}{2} {\Big (} c - \frac{d^{2}}{r} {\Big )} \) and \( r_{1} = \frac{1}{2} {\Big (} r - \frac{d^{2}}{c} {\Big )} \).
Consequently,
Therefore, E(t) is non-negative.
Lemma 4.2
Let \( \left( \varphi , \psi , \theta , P \right) \) be the solution of (9)–(11), then the functional
satisfies, for any \( \varepsilon _{1} > 0 \), the estimate
Proof
Differentiating \( I_{1}(t) \), we obtain
using the first two equations in (9), we find
Integrating by parts and boundary conditions (11), we arrive at
By virtue of Young’s and Cauchy–Schwarz’s inequalities, we find for \( \varepsilon _{1} > 0 \)
The substitution of (30) into (29) completes the proof. \(\square \)
Lemma 4.3
Let \( \left( \varphi , \psi , \theta , P \right) \) be the solution of (9)–(11), then the functional
satisfies, for \( \varepsilon _{2} > 0 \), the following estimate
Proof
Direct computation, using equation (9)\(_{1} \) and then integrating by parts, we get
Thanks to Young’s and Poincaré’s inequalities, we have
So, we arrive at
and by substituting the following relation
into (33), then the desired result follows. \(\square \)
Lemma 4.4
Let \( \left( \varphi , \psi , \theta , P \right) \) be the solution of (9)–(11), define the functional
then, the functional \( I_{3} \) satisfies, for \( \varepsilon _{3} > 0 \)
Proof
Differentiating \( I_{3}(t) \), using equations (9)\(_{1} \) and (9)\(_{2} \), we get
Integrating by parts, we obtain
Using Young’s and Poincaré’s inequalities for any \( \varepsilon _{3} > 0 \), we have
which yields the desired result (35), by substituting (37)–(40) into (36). \(\square \)
Lemma 4.5
Let \( \left( \varphi , \psi , \theta , P \right) \) be the solution of (9)–(11), then the functional
satisfies, for any \( \varepsilon _{4} > 0 \), the following estimate
Proof
Differentiating \( I_{4}(t) \), we have
By using the first and third equations of (9), integrating by parts, boundary conditions (11) and using the fact that \( \int _{0}^{L} \varphi (x) \, dx = 0 \), we find
The last four terms at the right hand side of (43) are estimated as follows
Consequently, we establish (42) by inserting (44)–(47) into (43). \(\square \)
In the following, we assume that (13) holds and define the Lyapunov functional \( {\mathcal {L}}(t) \) by
where \( N, N_{1} \) and \( N_{2} \) are positive constants to be chosen appropriately later.
Lemma 4.6
Let \( ( \varphi , \psi , \theta , P ) \) be the solution of (9)–(11). Then, there exist two positive constants \( \alpha _{1}, \alpha _{2} \) such that
and
Proof
It follows that
By using Young’s, Poincaré’s and Cauchy–Schwarz’s inequalities, we obtain
Consequently, from (26), we have
which can be rewritten as
Therefore, (49) is established by choosing N (depending on \( N_{1} \) and \( N_{2} \)) large enough.
Now, differentiating (48), recalling (25), (28), (32), (35) and (42), we find
and by letting
we arrive at
Now, we select our parameters appropriately, we start by choosing \( N_{1} \) large enough such that
Next, we choose \( N_{2} \) large enough so that
Finally, we select N very large enough such that
and
All these choices leads to
On the other hand, from (24), using Poincaré’s and Young’s inequalities, we arrive at
That is,
Therefore, we obtain the desired result (50) by combining (51) and (52). \(\square \)
Now, we are ready to prove the following stability result.
Theorem 4.1
Assume that (13) holds and let \( ( \varphi , \psi , \theta , P ) \) be the solution of (9)–(11). Then for any \( U_{0} \in \mathcal {D(A)} \), there exist two positive constants \( \alpha _{3}, \alpha _{4} \) such that the energy functional defined by (24) satisfies
Proof
From the equivalence of E(t) and \( {\mathcal {L}}(t) \) (relation (49)) and estimation (50), we have
where \( \alpha _{4} = \frac{\lambda _{1}}{\alpha _{2}} \). A simple integration of (54) gives
which yields the desired result (53) by using the other side of the equivalence relation again. \(\square \)
5 Polynomial stability and optimality
In this section, we consider the polynomial stability for system (9)–(11) in case of different wave speeds (\( \frac{\rho _{1}}{k_{1}} \ne \frac{\rho _{2}}{b} \)). For this purpose, we use the second-order energy method. The second-order energy is defined by
As in Lemma 4.1, it follows that \( {\mathcal {E}}(t) \) satisfies
Lemma 5.1
Let \( \left( \varphi , \psi , \theta , P \right) \) be the solution of (9)–(11), then the functional
satisfies, for any \( \varepsilon _{3} > 0 \), the estimate
Proof
We showed that the derivative of \( I_{3}(t) \) (Lemma 4.4) satisfies
Now, from the fourth equation in (9), we have
Consequently, we get
So, by inserting (60) into (59), we arrive at
Then, the desired result follows by using Young’s and Poincaré’s inequalities. \(\square \)
The main result of this section is given by the following theorem.
Theorem 5.1
Let \( ( \varphi , \psi , \theta , P ) \) be the solution of (9)–(11) and assume that \( \frac{\rho _{1}}{k_{1}} \ne \frac{\rho _{2}}{b} \). Then, there exists a positive constant \( \alpha _{5} \) such that the energy functional E(t) satisfies
Proof
We define a Lyapunov functional \( {\mathcal {K}} \) as
Next, by differentiating \( {\mathcal {K}}(t) \), recalling (25), (28), (32), (42), (56) and (58) with the same choice of \( \varepsilon _{1}, \varepsilon _{2}, \varepsilon _{4} \), except for \( \varepsilon _{3} \), we choose \( \varepsilon _{3} = \frac{b}{8 N_{1}} \), we arrive at
Similarly to what we did with \( {\mathcal {L}}^{'}(t) \), we choose \( N_{1} \) large enough so that
Then, we select \( N_{2} \) large enough such that
Finally, we choose N very large enough such that
Consequently, by exploiting (24), we find
A simple integration of (63) over (0, t) , recalling that E(t) is non-increasing and positive, yields
That is, for \( \alpha _{5} = \frac{{\mathcal {K}}(0)}{\alpha _{6}} = \frac{E(0) + {\mathcal {E}}(0)}{\alpha _{6}} \), we have
which completes the proof. \(\square \)
Next, we show that the polynomial decay rate is optimal. To achieve this optimality result, we prove by contradiction. It should be noted that the polynomial result given by (61) is equivalent to
Assume the result can be improved from \(t^{-\frac{1}{2}}\) to \(t^{-\frac{1}{2-\varepsilon }}\), for some \(0<\varepsilon <2\). Then \(\dfrac{1}{\mu ^{2-\varepsilon }}\Vert U \Vert _{{\mathcal {H}}}\) must be bounded. In other words,
must be bounded. Unfortunately, from (23) we have \(\Vert U \Vert ^2_{{\mathcal {H}}}\ge c\mu ^4,\) for large \(\mu \). Consequently, the decay rate cannot be improved. Thus, the polynomial stability result obtained for the different wave speeds is optimal.
6 General remark and open problem
A one-dimensional Timoshenko system coupled with thermal and mass diffusion effects is considered. The stability results (exponential and polynomial) obtained depend on the behavior of the wave speeds. In other words, the system is exponentially stable if the wave speeds on the first two equations of the system are equal; otherwise, a polynomial result was demonstrated. Even though we have investigated the system for Neumann–Dirichlet–Dirichlet–Dirichlet conditions, the results are also true for some other boundary conditions. One of interesting open problems is to consider system (9) free of the second spectrum. This is achieved by replacing \(\psi _{tt}\) in the second equation of (9) with \(\varphi _{ttx}\). We believe that the resulting system will be exponentially stable, irrespective of the wave propagation velocities of the system.
Data Availability
Data sharing is not applicable to this article as no new data were created or analyzed in this study.
References
Almeida Júnior, D.S., Santos, M.L., Muñoz Rivera, J.E.: Stability to 1-D thermoelastic Timoshenko beam acting on shear force. Z. Angew. Math. Phys. 65(6), 1233–1249 (2014)
Alves, M.O., Caixeta, A.H., Jorge Silva, M.A., Rodrigues, J.H., Almeida Júnior, D.S.: On a Timoshenko system with thermal coupling on both the bending moment and the shear force. J. Evol. Equ. 20, 295–320 (2020)
Alves, M.S., Jorge Silva, M.A., Ma, T.F., Muñoz Rivera, J.E.: Invariance of decay rate with respect to boundary conditions in thermoelastic Timoshenko systems. Z. Angew. Math. Phys. 67, 70 (2016)
Ammar-Khodja, F., Benabdallah, A., Muñoz Rivera, J.E., Racke, R.: Energy decay for Timoshenko systems of memory type. J. Differ. Equ. 194(1), 82–115 (2003)
Aouadi, M., Ciarletta, M., Tibullo, V.: Well-posedness and exponential stability in binary mixtures theory for thermoviscoelastic diffusion materials. J. Therm. Stress. 41, 1414–1431 (2018)
Aouadi, M., Copetti, M.I.M.: A dynamic contact problem for a thermoelastic diffusion beam with the rotational inertia. Appl. Numer. Math. 126, 113–137 (2018)
Aouadi, M., Campo, M., Copetti, M.I.M., Fernández, J.R.: Existence, stability and numerical results for a Timoshenko beam with thermodiffusion effects. Z. Angew. Math. Phys. 70(4), 1–26 (2019)
Aouadi, M., Ramos, A., Castejón, A.: Stability conditions for thermodiffusion Timoshenko system with second sound. Z. Angew. Math. Phys. 72(4), 1–32 (2021)
Apalara, T.A.: General stability of memory-type thermoelastic Timoshenko beam acting on shear force. Continuum Mech. Thermodyn. 30, 291–300 (2018)
Apalara, T.A., Raposo, C.A., Ige, A.: Thermoelastic Timoshenko system free of second spectrum. Appl. Math. Lett. 126, 107793 (2022)
Djellali, F., Labidi, S., Taallah, F.: Exponential stability of thermoelastic Timoshenko system with Cattaneo’s law. Ann. Univ. Ferrara 67, 43–57 (2021)
Djellali, F., Labidi, S.: On the stability of a thermodiffusion Bresse system. J. Math. Phys. 63(8), 081505 (2022)
Djellali, F., Labidi, S., Taallah, F.: General decay for a viscoelastic-type Timoshenko system with thermoelasticity of type III. Appl. Anal. 102, 902–920 (2023)
Dridi, H., Feng, B., Zennir, K.: Stability of Timoshenko system coupled with thermal law of Gurtin–Pipkin affecting on shear force. Appl. Anal. 101, 5171–5192 (2022)
Elhindi, M., El Arwadi, T.: Analysis of the thermoviscoelastic Timoshenko system with diffusion effect. Partial Differ. Equ. Appl. Math. 4, 100156 (2021)
Elhindi, M., Zennir, K., Ouchenane, D., Choucha, A., El Arwadi, T.: Bresse-Timoshenko type systems with thermodiffusion effects: well-posedness, stability and numerical results. Rend. Circ. Mat. Palermo Ser. 2, 1–26 (2021)
Feng, B.: Exponential stabilization of a Timoshenko system with thermodiffusion effects. Z. Angew. Math. Phys. 72(4), 1–17 (2021)
Feng, B., Youssef, W., El Arwadi, T.: Polynomial and exponential decay rates of a laminated beam system with thermodiffusion effects. J. Math. Anal. Appl. 517(2), 126633 (2023)
Gearhart, L.: Spectral theory for contraction semigroups on Hilbert space. Trans. Am. Math. Soc. 236, 385–394 (1978)
Guesmia, A., Messaoudi, S.A., Soufyane, A.: Stabilization of a linear Timoshenko system with infinite history and applications to the Timoshenko-heat systems. Electron. J. Differ. Equ. 2012, 1–45 (2012)
Guesmia, A., Soufyane, A.: On the stability of Timoshenko-type systems with internal frictional dampings and discrete time delays. Appl. Anal. 96, 2075–2101 (2017)
Huang, F.: Characteristic conditions for exponential stability of linear dynamical systems in Hilbert spaces. Ann. Differ. Equ. 1(1), 43–56 (1985)
Liu, Z., Zheng, S.: Semigroups Associated with Dissipative Systems. Chapman Hall/CRC, Boca Raton (1999)
Messaoudi, S.A., Mustafa, M.I.: A general stability result in a memory-type Timoshenko system. Commun. Pure Appl. Anal. 12, 957–972 (2013)
Muñoz Rivera, J.E., Racke, R.: Mildly dissipative nonlinear Timoshenko systems-global existence and exponential stability. J. Math. Anal. Appl. 276(1), 248–278 (2002)
Muñoz Rivera, J.E., Fernández Sare, H.D.: Stability of Timoshenko systems with past history. J. Math. Anal. Appl. 339, 482–502 (2008)
Pazy, A.: Semigroups of Linear Operators and Applications to Partial Differential Equations. Springer, New York (1983)
Prüss, J.: On the spectrum of \(C_{0}\)-semigroups. Trans. Am. Math. Soc. 284(2), 847–857 (1984)
Ramos, A.J.A., Aouadi, M., Almeida Júnior, D.S., Freitas, M.M., Araujo, M.L.: A new stabilization scenario for Timoshenko systems with thermo-diffusion effects in second spectrum perspective. Arch. Math. 116(2), 203–219 (2021)
Soufyane, A.: Stabilisation de la poutre de Timoshenko. C. R. Acad. Sci. Ser. 1 Math 328, 731–734 (1999)
Tian, X., Zhang, Q.: Stability of a Timoshenko system with local Kelvin-Voigt damping. Electron. Z. Angew. Math. Phys. 68, 1–15 (2017)
Timoshenko, S.P.: On the correction for shear of the differential equation for transverse vibrations of prismatic bars. Lond. Edinb. Dubl. Philos. Mag. J. Sci. 41(245), 744–746 (1921)
Acknowledgements
The authors thank very much both reviewers for their careful reading and valuable suggestions. The second author appreciates the continuous support of University of Hafr Al Batin.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
This article is part of the section “Theory of PDEs” edited by Eduardo Teixeira.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Djellali, F., Apalara, T.A. & Zitouni, M. Uniform stability of a thermodiffusion Timoshenko beam. Partial Differ. Equ. Appl. 4, 22 (2023). https://doi.org/10.1007/s42985-023-00243-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42985-023-00243-1