
Abstract
Model-based control strategies for microbial fuel cell are able to create a balance between fuel supply, mass, charge and electric charge, performance efficiency. This paper designs a new adaptive sliding mode control scheme of single chamber single population microbial fuel cell. The adaptive method estimates parametric uncertainty and nonlinear terms while the sliding mode method achieves microbial fuel cell performance targets. The significant advantage of the suggested scheme is its capability to provide robustness against parametric uncertainties and handle systems nonlinearity. The Lyapunov technique has been used to demonstrate robust stability in the face of nonlinearity and uncertainty. Numerical simulations confirms that the proposed control method is able to meet the desired specification in the presence of varieties of parametric uncertainty.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Today, the importance of energy in the life of human societies is not hidden from anyone. Increasing demand for energy has been accepted as a fundamental and vital issue, and we must provide appropriate solutions to meet the needs of different societies. Although the nature of this demand varies between developed and developing countries (one to improve the quality of service and life and the other to meet basic needs), so the growing energy needs must be met in some way. Renewable energy is resultant from natural processes that are replenished constantly and using of it is a reliable way to supply energy to meet the growing energy needs. In various forms, it originates directly from the sun, or from heat generated deep within the earth. Included in the definition is electricity generated from solar, wind, ocean, hydropower, biomass, geothermal resources, and biofuels and hydrogen derived from renewable resources [1,2,3,4,5,6,7,8]. Reducing energy dependence, stable energy prices, increasingly competitive, reliability and resilience, less global warming and improved public health are some benefits of the renewable energy.
In recent years, attention to the renewable energy potential of the microbial fuel cell (MFC) has increased for several reasons. Using MFCs is very beneficial to the environment as it helps in the reduction of pollution and cuts the cost of water treatment tremendously. Apart from being an energy source, MFC also has the potential to provide sustainable power sources to isolated communities and desalinate water. Microbial fuel cell is considered as a novel reliable, clean, efficient bio-renewable energy source which harnesses energy from metabolism of microorganisms and does not generate any toxic by-product. Microorganisms such as bacteria can generate electricity by using of organic matter and biodegradable substrates such as wastewater whilst accomplish biodegradation/treatment of biodegradable products such as municipal wastewater [9, 10].
Parameters such as substrate concentration, growth of the microorganisms and biomass, operational and environmental temperature, and pH value in anode compartment affect the MFC performance as far as voltage or power density are concerned. Two chamber MFC with one type of bacterial species [11], single chamber MFCs with two bacterial species [12, 13], and single chamber single population microbial fuel cell [14] are some mathematical models that facilitate analysis and synthesis of the parameters impact on MFC performance [15, 16]. For optimal performance, the MFC operation must be controlled under different conditions. Based on different mathematical models of the MFC system, various control strategies have been developed to achieve the desired performance of the fuel cell. Proportional integral (PI) based gain scheduling control [17], proportional integral and derivative (PID) and On/OFF control scheme [18], fuzzy PID control [19], model predictive control and adaptive fuzzy control techniques [20, 21] and adaptive backstepping control technique [14, 22] have been formulated to achieve optimal performance but significant problems remain. In the presence of nonlinear terms and uncertainties, the function of linear controllers is not effective and also because of the recursive method calculations and virtual control derivatives complexity, control signal using backstepping approach is not desirable [23,24,25].
In this paper, in order to achieve the optimal performance of the fuel cell in different operating conditions, in the presence of nonlinear terms and parametric uncertainties, an adaptive sliding mode control method is proposed. Sliding mode controller using a simple design has the ability to overcome uncertainties and nonlinear terms effects. Accordingly, in this paper, the model of single chamber single population microbial fuel cell is considered and by using the adaptive method, the values of nonlinear terms and parametric uncertainties are estimated. Then, a sliding mode method has been used to achieve the desired output voltage in the presence of parametric uncertainty and Lyapunov stability analysis is used to make certain the stability performance. The most important innovation of this article is providing a combined adaptive sliding mode control method for microbial fuel cell where the effects of nonlinear terms and uncertain parameters are estimated by the adaptive method and the sliding mode method with a simple design is used to achieve optimal MFC performance.
Accordingly, this article is organized as follows: In the second part, the mathematical model of the microbial fuel cell is given. The third section describes the proposed control method, and the fourth section describes the simulation results. Conclusions and suggested future work directions given in the fifth section.
2 Single Chamber Single Population Microbial Fuel Cell Mathematical Model
A mathematical model of the MFC describes the effect of design and operational parameters on the overall performance. Various mathematical models of MFCs are provided in Table 1.
In these formulae, \(\mu\) is specific bacterial growth and \({\mu }_{max}\) shows its maximum value, \({C}_{s}\) is the substrate concentration and \({K}_{s}\) specifies half-saturation constant, \(E\), \({E}_{eq}\) and \({E}_{o}\) are electrode potential, equilibrium potential and standard electrode potential respectively, \(i\) is the current density and \({i}_{o}\) states exchange current density, \(F\), \(T\) and \(R\) are Faraday's constant, Temperature and universal gas constant respectively, \({\alpha }_{a}\) and \({\alpha }_{c}\) are the anode and cathode charge transfer coefficient, \(n\) is the number of electrons transferred and \(Q\) is the reaction quotient.
2.1 Single Chamber Single Population Microbial Fuel Cell
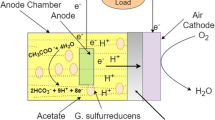
Anode, cathode, media, membrane and microorganisms are fundamental components of MFCs. Electrons are moved from anode to cathode via an external circuit. Through proton exchange membrane (PEM), protons are moved from anode to cathode. Freshen water and electricity generation from wastewater are achieved by combining electrons and protons at cathode. Ali Abul et al. established single chamber microbial fuel cell model with a proton exchange membrane. Acetate is the substrate and G. sulfurreducens is the bacterium. Some of the assumptions used are given in [12]. The reactions in anode and cathode compartments are as follows:
Monod equation provides the equation between active biomass and substrate dynamics. Active biomass requires energy for maintenance which is affected by the flow of electron and energy through endogenous decay. The net biomass growth rate is given by
where \({\mu }_{syn}\) is specific growth rate and \({\mu }_{max}\) states maximum specific growth rate of microorganisms, \(X\) indicates the biomass concentration, \({C}_{s}\) specifies the substrate concentration, \({k}_{s}\) expresses the half saturation constant and \({k}_{d}>0\) is the decay coefficient. Bacteria breaks down the substrate and utilizes it to live and grow. The cell growth is derived from the substrate utilization given by
where \(q\) states the rate of substrate utilization and \({q}_{max}\) is its maximum rate.
2.1.1 Physical Model
Microbial fuel cell system receives a feed flow at the anode with a rate of \(Q\) in terms of substrate concentration \({C}_{so}\) and modulates the MFC behavior. The substrate concentration and the cell growth dynamics are
where \(D\), (the dilution rate) is the control input and \(Y\) is the growth yield [12].
2.1.2 Control Oriented Model
Substrate utilization and biomass growth are related by \({\mu }_{max}=Y.{q}_{max}\) and it is applied for both anodophilic and methanogenic bacterial biomass. Parameter \({\mu }_{max}\) is denoted as\(-{\theta }_{1}^{-1}\). By considering substrate concentration\({C}_{s}\), biomass concentration \(X\) and dilution rate D as the states\({x}_{1}\), \({x}_{2}\) and input u, we have
Values of \({q}_{max}\) and \({\mu }_{max}\) are \({3d}^{-1}\) and \(0{.4d}^{-1}\) respectively [12]. The identifiable interval of the parameter \({\mu }_{max}\) is 3.01% with 95% confidence level [13] and so \(0.3699<{\theta }_{1}^{-1}<0.4301.\)
3 Adaptive Sliding Mode Control
In this section, the proposed control method is described. The purpose of the adaptive sliding mode controller is to achieve optimal performance of the MFC by regulating substrate concentration to a specific set point. We have selected the dilution rate as a manipulated input variable to control the MFC substrate concentration.
Define the error as follows.
where \({x}_{1d}\) and \({x}_{2d}\) are the desired equilibrium points. By deriving from the error we will have.
By defining
The system error equations are rewritten as follows:
By selecting the sliding lines as follows
To stabilize the error system, select the \({u}_{1}\) and \({u}_{2}\) control vectors as follows.
where \({\widehat{f}}_{1}\) and \({\widehat{f}}_{2}\) are adaptive estimators for estimating the uncertainties and nonlinear terms of the system. To prove stability, we select the Lyapunov function as follows:
where
By deriving from the Lyapunov function and placing \({u}_{1}\) and \({u}_{2}\), It is obtained.
Simplifying the above equation achieves
Now by defining the adaptive rules as follows
It is obtained
Therefore \({s}_{1}{\dot{s}}_{1}+{s}_{2}{\dot{s}}_{2}<-{k}_{1}\left|{s}_{1}\right|-{k}_{2}\left|{s}_{2}\right|\) where \({k}_{1}\) and \({k}_{2}\) are positive constants. For \({s}_{i}\left({t}_{0}\right)<0,i=\mathrm{1,2}\) this inequality leads to \({\dot{s}}_{i}\ge {k}_{i},\iota =\mathrm{1,2}\) and for \({s}_{i}\left({t}_{0}\right)>0,i=\mathrm{1,2},\) it leads to \({\dot{s}}_{i}\ge {k}_{i},i=\mathrm{1,2}\) and for \({s}_{i}\left({t}_{0}\right)>0,\) it leads to \({\dot{s}}_{i}\ge -{k}_{i},\iota =\mathrm{1,2}\). Consequently, it is guaranteed that terminal sliding surfaces \({s}_{i},i=\mathrm{1,2}\) becomes zero in a finite reaching time \({t}_{s}\le \left|\frac{{s}_{1}\left({t}_{0}\right)}{{k}_{1}}\right|+\left|\frac{{s}_{2}\left({t}_{0}\right)}{{k}_{2}}\right|+{t}_{0}\). Therefore, the finite time convergence of trajectories of system to \({s}_{i}\left({t}_{0}\right)>0,i=\mathrm{1,2}\) is also proved.
4 Simulation Results
In this section, we simulate the microbial fuel cell system. To prove the efficiency of the proposed controller, the results obtained will be compared with the results of the adaptive back-stepping controller [14]. The goal of control is to obtain a constant output voltage while maintains the substrate concentration at the desired level according to variable load conditions. Therefore, the goal of simulation is to achieve a constant output voltage in the presence of the parameter uncertainty, and the tracking and parameter errors are zero or closer to zero in stable conditions. Also, the control parameters provided in this article are selected as follows.
For this purpose, we consider two different simulation scenarios.
Scenario 1. System parameters are certain.
The results of the simulation are given in Figs. 1, 2, 3, 4, 5, 6. As can be seen from Figs. 1 and 2, the desired concentration of substrate and biomass have reached the favorite level with less error than the adaptive back-stepping method. In Fig. 3, the control signal obtained from the proposed method shows less fluctuations than the adaptive back-stepping method and has a smoother behavior than the adaptive back-stepping method. Finally, the output voltages of anode, cathode, and microbial cell are given in Figs. 4, 5, 6. From these three Figures, it is clear that the output obtained from the proposed adaptive sliding mode method tends to the final value with smoother behavior, less error, and without overshot and undershot.

Performance of substrate concentration

Performance of biomass concentration

Control signal

Anode voltages of single chamber MFC

Cathode voltages of single chamber MFC

Voltages of single chamber MFC
Scenario 2. In this scenario, the system has an uncertain parameter as follows.
The simulation results in this scenario are shown in Figs. 7, 8, 9, 10, 11, 12. The results of the comparison obtained in the previous scenario are also presented in this scenario. The desired concentrations of substrate and biomass are well followed, as shown in Figs. 7, 8. Figure 9 shows that the signal obtained from the proposed control method has less fluctuations than the adaptive back-stepping method. Figures 10, 11, 12 also show the output voltage obtained from the anode, cathode, and microbial fuel cell. As previous scenario, by the proposed control method, the output voltage is followed without overshot and undershot and with a smooth behavior compared to the adaptive back-stepping method. Both of the above scenarios show that the proposed adaptive sliding mode is well able to track the control targets considered by the microbial fuel cell despite the system nonlinearity and uncertainty.

Performance of substrate concentration

Performance of biomass concentration

Control signal

Anode voltages of single chamber MFC

Cathode voltages of single chamber MFC

Voltages of single chamber MFC
5 Conclusion
In recent years, environmental and economic considerations have caused close attention to renewable energy sources. One of these sources is the microbial fuel cell which in addition to generating energy from wastewater, helps to purify water as well as cleans the air. Given the importance of microbial fuel cells, this paper has presented a new control method based on a combination of adaptive and sliding mode approaches. The simple sliding mode controller structure makes it easy to achieve the control goals of the microbial fuel cell while using of the adaptive method estimates the uncertain effects and nonlinear terms. The simulation results in this paper showed the controller's ability to achieve the desired control objectives including tracking the desired substrate concentration and of course the constant output voltage. Finite time sliding mode control as well as simultaneous control of several microbial fuel cells can be the path of future studies in this field.
Change history
02 May 2023
This article has been retracted. Please see the Retraction Notice for more detail: https://doi.org/10.1007/s42835-023-01509-9
References
Du Z, Li H, Gu T (2007) A state of the art review on microbial fuel cells: a promising technology for wastewater treatment and bioenergy. Biotechnol Adv 25:464–482
Davis F, Higson SPJ (2007) Biofuel cells—recent advances and applications. Biosens Bioelectron 22:1224–1235
Granqvist CG (2007) Transparent conductors as solar energy materials: a panoramic review. Sol Energy Mater Sol Cells 91:1529–1598
Herbert GJ, Iniyan S, Sreevalsan E, Rajapandian S (2007) A review of wind energy technologies. Renew Sustain Energy Rev 11:1117–1145
Antonio FdO (2010) Wave energy utilization: a review of the technologies. Renew Sustain Energy Rev 14:899–918
Lund JW, Freeston DH, Boyd TL (2011) Direct utilization of geothermal energy 2010 worldwide review. Geothermics 40:159–180
Berndes G, Hoogwijk M, van den Broek R (2003) The contribution of biomass in the future global energy supply: a review of 17 studies. Biomass Bioenergy 25:1–28
Khare V, Nema S, Baredar P (2016) Solar–wind hybrid renewable energy system: a review. Renew Sustain Energy Rev 58:23–33
An J, Sim J, Lee HS (2015) Control of voltage reversal in serially stacked microbial fuel cells through manipulating current: significance of critical current density. J Power Sources 283:19–23
Andersen SJ, Pikaar I, Freguia S, Lovell BC, Rabaey K, Rozendal RA (2013) Dynamically adaptive control system for bioanodes in serially stacked bioelectrochemical systems. Environ Sci Technol 47(10):5488–5494
Zeng Y, Choo YF, Kim BH, Wu P (2010) Modelling and simulation of two-chamber microbial fuel cell. J Power Sources 195(1):79–89
Abul A, Zhang J, Steidl R, Reguera G, Tan X (2016) Microbial fuel cells: Control-oriented modeling and experimental validation. In 2016 American Control Conference (ACC) IEEE, pp. 412–417
Pinto RP, Srinivasan B, Manuel MF, Tartakovsky B (2010) A two-population bio-electrochemical model of a microbial fuel cell. Bioresour Technol 101(14):5256–5265
Patel R, Deb D (2018) Parametrized control-oriented mathematical model and adaptive backstepping control of a single chamber single population microbial fuel cell. J Power Sources 396:599–605
Ortiz-Martínez VM, Salar-García MJ, De Los Ríos AP, Hernández-Fernández FJ, Egea JA, Lozano LJ (2015) Developments in microbial fuel cell modeling. Chem Eng J 271:50–60
Recio-Garrido D, Perrier M, Tartakovsky B (2016) Modeling, optimization and control of bioelectrochemical systems. Chem Eng J 289:180–190
Boghani HC, Michie I, Dinsdale RM, Guwy AJ, Premier GC (2016) Control of microbial fuel cell voltage using a gain scheduling control strategy. J Power Sources 322:106–115
Recio-Garrido D, Tartakovsky B, Perrier M (2016) Staged microbial fuel cells with periodic connection of external resistance. IFAC-PapersOnLine 49(7):91–96
Yan M, Fan L (2013) Constant voltage output in two-chamber microbial fuel cell under fuzzy PID control. Int J Electrochem Sci 8(3):3321–3332
Fan L, Li C, Boshnakov K (2014) Performance improvement of a Microbial fuel cell based on adaptive fuzzy control. Pak J Pharma Sci 27(3):685–690
Fan L, Zhang J, Shi X (2015) Performance improvement of a microbial fuel cell based on model predictive control. Int J Electrochem Sci 10(1):737–748
Patel R, Deb D (2017) Control-oriented parametrized models for microbial fuel cells. In 2017 6th International conference on computer applications in electrical engineering-recent advances (CERA), IEEE, pp. 152–157
Shi X, Cheng Y, Yin C, Huang X, Zhong SM (2019) Design of adaptive backstepping dynamic surface control method with RBF neural network for uncertain nonlinear system. Neurocomputing 330:490–503
Yu H, Jing Y, Zhang S (2016) Complexity explosion problem analysis and development in back-stepping method. In 2016 Chinese control and decision conference (CCDC), IEEE, pp. 1753–1758
Ghanavati M, Salahshoor K, Jahed Motlagh MR, Ramezani A, Moarefianpour A (2017) A novel robust generalized backstepping controlling method for a class of nonlinear systems. Cogent Eng 4(1):1342309
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This article has been retracted. Please see the retraction notice for more detail: https://doi.org/10.1007/s42835-023-01509-9"
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Fu, X., Fu, L. & Imani Marrani, H. RETRACTED ARTICLE: A Novel Adaptive Sliding Mode Control of Microbial Fuel Cell in the Presence of Uncertainty. J. Electr. Eng. Technol. 15, 2769–2776 (2020). https://doi.org/10.1007/s42835-020-00535-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42835-020-00535-1