
Abstract
Microbial fuel cells are one of the most important elements in the renewable energy supply chain. To increase the efficiency and performance of the fuel cell, designing a suitable control method is essential to achieve reliable performance and output stability. By considering the parametric uncertainties on the microbial fuel cell model as well as nonlinear terms, this paper presents a novel finite time adaptive sliding mode control method that achieves optimal performance of fuel cell in a finite time and also ensures the stability of the closed loop system. Sliding mode method without linearization or elimination of nonlinear terms has been used as a robust method to overcome uncertainty effects and guarantees proper operation of the fuel cell in the presence of the effects. The finite time convergence of the states is also assured by using of the proposed method. Furthermore, it uses an adaptive method to determine the sliding mode control coefficients which eliminates the necessity to know the upper bound of uncertainty. Finally, the simulation results show the efficiency and stability of the proposed method in different operating conditions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Responding to the growing need for energy requires increasing attention to renewable resources. These resources play an important role in reducing environmental pollution and fossil fuels [1, 2]. Given the need to reduce emissions for energy in the coming years, attention to clean energy is an unstoppable approach, and this has been repeatedly reminded by [3, 4]. Overall, the development of clean energy is critical for preventing global climate change and global warming. Currently, wind energy [5, 6], solar energy [7], biomass [8], geothermal energy [9], biodiesel and hydraulic energy [10, 11] are the most important sources of renewable energy to extract clean energy.
Due to economic and environmental considerations, bioenergy production has been widely considered, and in the meantime, microbial fuel cell (MFC) is the most important tool for generating electricity using the ability of microorganisms [12]. The microbial fuel cell achieves four effective functions including electricity generation, hydrogen production, wastewater treatment and biological oxygen demand (BOD) biosensors [13]. In view of the above, the microbial fuel cell is one of the best tools for generating electrical energy along with other useful functions, and recently, numerous studies have been conducted for its analysis and control [14,15,16,17,18,19].
One of the important fields about MFC is the design of a suitable control method for achieving stability and optimal performance in different operating conditions. To date, various models have been proposed to describe the actual performance of the microbial fuel cell system [20,21,22,23,24]. It is clear that the proposed models are not able to accurately describe the MFC behavior and anyway, there are uncertainties in the models. The next issue is the need to pay attention to the nonlinear behavior of MFC in different operating conditions. Therefore, in the controller design, it is necessary to consider the nonlinear terms in the studied models away from linearization. Due to the high efficiency of the robust controller in various applications [25,26,27,28,29,30,31,32], the use of this approach is necessary to cover the mentioned effects.
So far, various control methods have been considered for MFC control including the method of backstepping [33, 34], adaptive sliding mode [35], fuzzy proportional integral derivative (PID) [36], adaptive fuzzy [37], model predictive control [38], on/off and PID [39], gain scheduling [40], sampled-time digital control [41] and so on. Each of the mentioned methods has advantages and disadvantages. In backstepping and adaptive backstepping methods, computational complexity is the most important problem and other methods also suffer from linearization, uncertainty and other problems. The most important goals pursued in this study are the achieving to the desired output, proper operation, stability guarantee and finite time control of MFC in the presence of model uncertainty and considering nonlinear effects. Finite time control makes it possible to achieve the desired output specifications in a limited time [42,43,44], not infinite, and during this limited time, which is pre-adjustable and predictable, the system state variables converge exactly to the equilibrium point. Moreover, the combination of sliding mode control method with adaptive method has been used to achieve the desired output characteristics, of course, the adaptive method is also used to determine the coefficients of the sliding mode control method. For unknown upper bound of uncertainty, applying the adaptive method can overcome the limitation and of course, the control signal obtained from the proposed method causes the non-linear system state variables follow the desired output completely after a finite time and with zero error. Accordingly, this paper is arranged as follows: In the second section, the mathematical model is presented for MFC under study. Descriptions of the actual MFC system and the model used are given in this section. The third section describes the proposed control method. This section includes the class of the MFC system providing a finite time sliding mode method by using of an adaptive method to determine its coefficients and ensure the stability of the closed-loop system. In the fourth section, the simulation results obtained by using of proposed method on the sample MFC are given. The fifth section also includes the conclusion and the direction of future studies.
2 Microbial Fuel Cell Model
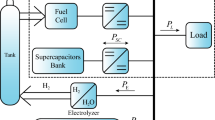
Microbial fuel cells are bio-electrochemical systems that convert chemical energy into electrical energy by catalytic reaction and the use of microorganisms as catalysts. Various models have been proposed to describe the performance of microbial fuel cells and to investigate the impact of a number of factors on their behavior [20,21,22,23,24]. Several parameters such as substrate concentration, voltage, current and output power affect the performance of microbial fuel cells. A schematic of the overall performance of a microbial fuel cell is shown in Fig. 1.

Single chamber MFC with proton-exchange membrane (PEM)
From a control point of view, several kinds of models have been considered to explain MFC behavior. In this paper, the single chamber single population MFC control model is used to design the controller. According to [35], the state space equations of this model are as follows:
In the above equations, \(x_{1}\) represents the substrate concentration and \(x_{2}\) represents the concentration of biomass. \(\theta_{1}^{ - 1}\) defines specific bacterial growth maximum value, \(Y\) states biomass growth, \(K_{s}\) identifies half-saturation constant, \(C_{so}\) specifies the substrate concentration, \(K_{d} > 0\) states the Bacteria decay coefficient and \(u\) is the control input. The reader can refer to [33, 35] for more information about the model used.
3 Finite Time Adaptive Sliding Mode Control
In this part, a finite time adaptive sliding mode controller is designed to control the states of the microbial fuel cell system, which has the advantages of sliding mode control, finite time mechanism and adaptive algorithm. First, a terminal sliding mode controller is designed for finite time stability of the fuel cell system. It is necessary to determine the upper bound of uncertainties in problem with the terminal sliding mode design. To eliminate this shortcoming, an adaptive method has been used to estimate the upper bound of parametric uncertainty and also to determine the sliding mode control coefficients. A schematic of the proposed control method is shown in Fig. 2. Now the controller design steps are described. Let’s define the error as follows:
where \(x_{1d}\) and \(x_{2d}\) are arbitrary equilibrium points. By deriving the error, it is obtained

Schematic of the proposed control method
By definition
System error equations are rewritten as follows:
By selecting the sliding lines as follows
To stabilize the error system, we select the control vectors \(u_{1}\) and \(u_{2}\) as follows:
where \(v = \frac{p}{q}, p,q > 0\), \(\hat{f}_{1}\) and \(\hat{f}_{2}\) are adaptive estimators for sliding control benefits to eliminate uncertainty and nonlinear effects of the system.
Now to prove the stability, Lyapunov function is candidate as follows.
where
It is obtained by deriving the Lyapunov function and substituting \(u_{1}\) and \(u_{2}\).
By simplifying the above equation is obtained.
̇Now by defining the adaptive laws as follows.
It is obtained.
Thus, the designed control law guarantees the stability of the MFC system under the above mentioned uncertainties.
Lemma 1 ([45]).
Assume that there exists a continuous positive definite function \(V\left( t \right)\) that satisfies the following differential inequality:
where \(\rho _{1} > 0,~\rho _{2} > 0,\;{\text{and~}}\;0 < {\varrho } < 1,\) then \(V\left( t \right)\) converges to the equilibrium point in finite time \({ }t_{f}\) defined by
Lemma 2 ([45]).
Suppose \(\tau_{1} ,\tau_{2} , \ldots ,\tau_{n} {\text{and}}\) \(0 < h < 1\) are all positive constants, then the following inequality holds.
Consider the following Lyapunov function candidate:
The time derivative of the Lyapunov function \(V\) given by (25) results in
where the facts that
where
Using the following inequality
where Lemma 2 is applied and \(\gamma_{2} = 2 min\left( {k_{2} ,k_{4} } \right)\) is a positive constant, then (26) can be further expressed as
Then (32) can be reworked as the following two structures:
From (33), if \(\left( {\gamma_{1} - \frac{{c_{3} }}{V}} \right) > 0\), then the finite-time stability is still guaranteed by using Lemma 1, which implies that \(V\) converges to the region \(V \le c_{3} /\gamma_{1}\) in finite time, and hence, the sliding manifold \(s\) will converge to the region
in finite time. From (34), if \(\left( {\gamma_{2} - \frac{{c_{3} }}{{V^{{\left( {v + 1} \right)/2}} }}} \right) > 0\), then the finite-time stability is still assured by using Lemma 2, which indicates that \(V\) converges to the region \(V \le \left( {c_{3} /\gamma_{2} } \right)^{{2/\left( {v + 1} \right)}}\) in finite time, and thus, the sliding manifold \(s\) will converge to the region
in finite time. Therefore, the sliding manifold \(s\) will reach the region \(\left\| s \right\| \le \Delta\) in finite time.
4 Simulation Results
In this section, we simulate the fuel cell system using the proposed control method. One of the control objectives in relation to the fuel cell system is to track the reference concentrations of substrate and biomass to achieve the desired output voltage. Achieving this goal has been considered by examining various control criteria. Also, to prove the performance of the designed controller, the results obtained have been compared with the adaptive backstepping and the adaptive sliding mode controllers [34, 35]. For this purpose, we consider 2 different scenarios. Also, the controller parameters presented in this paper are selected as follows.
Scenario 1
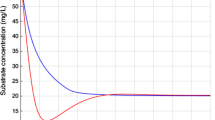
The system parameters don’t have uncertainty. In this case, the system model fully describes the behavior of the system. The simulation results in this scenario are shown in Figs. 3 - 5. Figure 3 shows the system states in tracking the reference concentrations for substrate and biomass. Figure 4 shows the control signal obtained from the three controllers, and Figs. 5 shows the output voltages of the anode, cathode, and MFC. However, as shown in Fig. 3, the finite-time adaptive sliding mode method provides faster convergence to the reference value than other methods. In Fig. 4, the control signals obtained from the three methods show that the proposed method in the paper has a high amplitude in the first moments, while over time, it tends to zero quickly, and of course the control signals obtained from the other two methods, despite the relatively large amplitude in the initial moments, move at a slower speed towards the limited values. The output obtained for the anode, cathode and MFC also indicate that the proposed method has a higher convergence speed than the other two methods. It gives a constant output voltage without overshoot and without undershoot.

Performance of a substrate concentration b biomass concentration

Control Signal

Voltages of single chamber a Anode, b Cathode, c MFC
Scenario 2
In this scenario, a parametric uncertainty is considered as follows.
The simulation results under the above-mentioned uncertainty are shown in Figs. 6 to 8. As can be seen from Fig. 6, the proposed method provides a higher convergence speed without overshoot-undershoot, while the backstepping method has a behavior with overshoot-undershoot and with a lower convergence speed. The control signals similar to the previous scenario are shown in Fig. 7. The anode, cathode and MFC output voltages are also shown in Fig. 8, respectively. As can be seen from the figure, the proposed method provides a stable output without any overshoot-undershoot at a high convergence rate, while the output voltages fluctuates in the adaptive backstepping method. Also, the output obtained from adaptive sliding mode method moves towards instability. In addition, the MFC has the highest output voltage under the finite time adaptive sliding mode method which is another reason for the superiority of the proposed method.

Performance of a substrate concentration b biomass concentration

Control Signal

Voltages of single chamber a Anode, b Cathode, c MFC
To show the advantage of the proposed control technique in terms of transient state behavior of the system, its overshoot and undershoot is compared in Tables 1 and 2. As can be seen from the tables, under the planned controller, the states of the system experience smoother behavior without overshoot and undershoot.
5 Conclusion
In this paper, a new robust finite time control method is presented based on adaptive algorithm and terminal sliding mode control approach. The proposed method offers the following advantages simultaneously:
(1) Covering the effects of uncertainties (2) Covering nonlinear terms without removing or linearizing (3) Ensuring finite time stability (4) Achieving the desired MFC operating points without overshoot and undershoot in the system response (5) Eliminate the chattering effects of the sliding mode method using the adaptive method to determine its coefficients (6) No need to know the upper bound of uncertainties in the system. The simulation results show that the proposed method offers higher convergence speed, lower chattering, and response without overshoot and undershoot as well as better stability than the other two methods. Also, the error of tracking the reference values in this method is less and the simulation results show the robustness of the proposed method against the uncertainties in the system. Considering the effects of noise and disturbance as well as limitations on actuators and states can be a good path for future studies in this field.
References
Zhao X, Ye Y, Ma J, Shi P, Chen H (2020) Construction of electric vehicle driving cycle for studying electric vehicle energy consumption and equivalent emissions. Environ Sci Pollut Res 27(30):37395–37409
Zhang R, Jiang T, Li F, Li G, Chen H, Li X (2020) Coordinated bidding strategy of wind farms and power-to-gas facilities using a cooperative game approach. IEEE Trans Sustain Energy 11(4):2545–2555
Klimenko VV, Klimenko AV, Tereshin AG (2019) From Rio to Paris via Kyoto: how the efforts to protect the global climate affect the world energy development. Therm Eng 66(11):769–778
Gielen D, Boshell F, Saygin D, Bazilian MD, Wagner N, Gorini R (2019) The role of renewable energy in the global energy transformation. Energ Strat Rev 24:38–50
Gholami A, Sahab A, Tavakoli A, Alizadeh B (2019) A novel LMI-based robust model predictive control for DFIG-based wind energy conversion systems. Kybernetika 55(6):1034–1049
Zhang H, Hao J, Wu C, Li Y, Sahab A (2019) A novel LMI-based robust adaptive model predictive control for DFIG-based wind energy conversion system. Syst Sci Control Eng 7(1):311–320
Dupont E, Koppelaar R, Jeanmart H (2020) Global available solar energy under physical and energy return on investment constraints. Appl Energy 257:113968
Boundy RG, Davis SC (2010) Biomass energy data book: ed 3 (No. ORNL/TM-2011/43). Oak ridge national lab. (ORNL), Oak Ridge, TN (United States)
Dickson MH, Fanelli M (2013) Geothermal energy: utilization and technology. Routledge
Chen L, Xing L, Han L (2009) Renewable energy from agro-residues in China: solid biofuels and biomass briquetting technology. Renew Sustain Energy Rev 13(9):2689–2695
Madheshiya AK, Vedrtnam A (2018) Energy-exergy analysis of biodiesel fuels produced from waste cooking oil and mustard oil. Fuel 214:386–408
Rahimnejad M, Adhami A, Darvari S, Zirepour A, Oh SE (2015) Microbial fuel cell as new technology for bioelectricity generation: A review. Alex Eng J 54(3):745–756
Kumar R, Singh L, Zularisam AW, Hai FI (2018) Microbial fuel cell is emerging as a versatile technology: a review on its possible applications, challenges and strategies to improve the performances. Int J Energy Res 42(2):369–394
Soavi F, Santoro C (2020) Supercapacitive operational mode in microbial fuel cell. Curr Opin Electrochem 22:1–8
Do MH, Ngo HH, Guo W, Chang SW, Nguyen DD, Liu Y, Kumar M (2020) Microbial fuel cell-based biosensor for online monitoring wastewater quality: A critical review. Sci Total Environ 712:135612
Zhang Y, Liu M, Zhou M, Yang H, Liang L, Gu T (2019) Microbial fuel cell hybrid systems for wastewater treatment and bioenergy production: synergistic effects, mechanisms and challenges. Renew Sustain Energy Rev 103:13–29
Kondaveeti S, Patel SK, Pagolu R, Li J, Kalia VC, Choi MS, Lee JK (2019) Conversion of simulated biogas to electricity: Sequential operation of methanotrophic reactor effluents in microbial fuel cell. Energy 189:116309
Cui Y, Lai B, Tang X (2019) Microbial fuel cell-based biosensors. Biosensors 9(3):92
Dai Q, Zhang S, Liu H, Huang J, Li L (2020) Sulfide-mediated azo dye degradation and microbial community analysis in a single-chamber air cathode microbial fuel cell. Bioelectrochemistry 131:107349
Pinto RP, Srinivasan B, Manuel MF, Tartakovsky B (2010) A two-population bio-electrochemical model of a microbial fuel cell. Biores Technol 101(14):5256–5265
Wen Q, Wu Y, Cao D, Zhao L, Sun Q (2009) Electricity generation and modeling of microbial fuel cell from continuous beer brewery wastewater. Biores Technol 100(18):4171–4175
Zeng Y, Choo YF, Kim BH, Wu P (2010) Modelling and simulation of two-chamber microbial fuel cell. J Power Sources 195(1):79–89
Oliveira VB, Simões M, Melo LF, Pinto AMFR (2013) A 1D mathematical model for a microbial fuel cell. Energy 61:463–471
Ortiz-Martínez VM, Salar-García MJ, De Los Ríos AP, Hernández-Fernández FJ, Egea JA, Lozano LJ (2015) Developments in microbial fuel cell modeling. Chem Eng J 271:50–60
Wu T, Cao J, Xiong L, Zhang H (2019) New stabilization results for semi-Markov chaotic systems with fuzzy sampled-data control. Complexity 2019:1–15
Shi K, Tang Y, Liu X, Zhong S (2017) Secondary delay-partition approach on robust performance analysis for uncertain time-varying Lurie nonlinear control system. Optim Control Appl Meth 38(6):1208–1226
Zhu G, Wang S, Sun L, Ge W, Zhang X (2020) Output feedback adaptive dynamic surface sliding-mode control for quadrotor UAVs with tracking error constraints. Complexity 2020:1–23
Zhang X, Wang Y, Chen X, Su CY, Li Z, Wang C, Peng Y (2018) Decentralized adaptive neural approximated inverse control for a class of large-scale nonlinear hysteretic systems with time delays. IEEE Trans Syst, Man, Cybernetics: Syst 49(12):2424–2437
Chen Z, Wang J, Ma K, Huang X, Wang T (2020) Fuzzy adaptive two-bits-triggered control for nonlinear uncertain system with input saturation and output constraint. Int J Adapt Control Signal Process 34(4):543–559
Wang J, Zhu P, He B, Deng G, Zhang C, Huang X (2020) An adaptive neural sliding mode control with ESO for uncertain nonlinear systems. Int J Control, Autom Syst 19(2):687–697
Yu D, Mao Y, Gu B, Nojavan S, Jermsittiparsert K, Nasseri M (2020) A new LQG optimal control strategy applied on a hybrid wind turbine/solid oxide fuel cell/in the presence of the interval uncertainties. Sustain Energy, Grids Netw 21:100296
Xiong L, Zhang H, Li Y, Liu Z (2016) Improved stability and H∞ performance for neutral systems with uncertain Markovian jump. Nonlinear Anal Hybrid Syst 19:13–25
Patel R, Deb D (2018) Parametrized control-oriented mathematical model and adaptive backstepping control of a single chamber single population microbial fuel cell. J Power Sources 396:599–605
Patel R, Deb D (2017) Adaptive backstepping control of single chamber microbial fuel cell. In: 2017 17th international conference on control, automation and systems (ICCAS). IEEE, pp 574–579
Fu X, Fu L, Marrani HI (2020) A novel adaptive sliding mode control of microbial fuel cell in the presence of uncertainty. J Electr EngTechnol 15(6):2769–2776
Yan M, Fan L (2013) Constant voltage output in two-chamber microbial fuel cell under fuzzy PID control. Int J Electrochem Sci 8:3321–3332
Fan L, Li C, Boshnakov K (2014) Performance improvement of a Microbial fuel cell based on adaptive fuzzy control. Pak J Pharm Sci 27(3):685–690
Fan L, Zhang J, Shi X (2015) Performance improvement of a microbial fuel cell based on model predictive control. Int J Electrochem Sci 10(1):737–748
Recio-Garrido D, Tartakovsky B, Perrier M (2016) Staged microbial fuel cells with periodic connection of external resistance. IFAC-PapersOnLine 49(7):91–96
Boghani HC, Michie I, Dinsdale RM, Guwy AJ, Premier GC (2016) Control of microbial fuel cell voltage using a gain scheduling control strategy. J Power Sources 322:106–115
Boghani HC, Dinsdale RM, Guwy AJ, Premier GC (2017) Sampled-time control of a microbial fuel cell stack. J Power Sources 356:338–347
Yu S, Yu X, Shirinzadeh B, Man Z (2005) Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 41(11):1957–1964
Wang J, Huang Y, Wang T, Zhang C, Hui Liu Y (2020) Fuzzy finite-time stable compensation control for a building structural vibration system with actuator failures. Appl Soft Comput 93:106372
Huang Y, Wang J, Wang F, He B (2021) Event-triggered adaptive finite-time tracking control for full state constraints nonlinear systems with parameter uncertainties and given transient performance. ISA Trans 108:131–143
Zou AM, Kumar KD, Hou ZG (2013) Distributed consensus control for multi-agent systems using terminal sliding mode and Chebyshev neural networks. Int J Robust Nonlinear Control 23(3):334–357
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Fu, L., Fu, X. & Imani Marrani, H. Finite Time Robust Controller Design for Microbial Fuel Cell in the Presence of Parametric Uncertainty. J. Electr. Eng. Technol. 17, 685–695 (2022). https://doi.org/10.1007/s42835-021-00919-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42835-021-00919-x