
Abstract
Modeling rodent populations has been always a challenge for population ecologists. These populations have oscillations that are dynamically complex. In this paper, we consider the population dynamics of rodents under the effect of the “specialist” and “generalist” predators with Beddington–DeAngelis and sigmoidal functional responses. We discover that the ODE system has one axial state and two boundary states. If the rate of predation by the generalist predator is more than the critical value \((c_2>c_2^*)\), then the system has a unique internal equilibrium which is stable if the predator’s intrinsic growth rate of population is more than the critical value \(s^*\). We show that the predation rates of the both predators (\(c_1, c_2\)) play an important role on rodent population dynamic. Then, we have considered a delay differential equation (DDE) model to account for the time delays in the transient dynamics. By treating time delays as the bifurcation parameter, we show that a Hopf bifurcation about the equilibria could happen for critical time delays. Finally, we gave an biological interpretation of our analytical results.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Modeling rodent populations has been always a challenge for population ecologists. These populations have oscillations that are dynamically complex. Mathematical models are important tools for analyzing ecological models. The dynamic relationship between prey and predators is one of the prevailing issues in mathematical ecology [2, 5, 15, 19, 23, 32, 39, 42]. The most common method of modeling ecological interactions consists of two differential equations with simple correspondence between the consumption of prey by the predator and the population growth. The traditional predator–prey models have been studied extensively [7, 10, 12, 26, 28]. Yodziz [43] proposed the following model to describe the interaction of predators and their prey which take the following very general form:
where P(t) and U(t) represent the prey and predators densities at time t, respectively; the function \(f = f(P)\) characterizes the growth rate of the prey population in the absence of predator (almost all of models were limited to use the Malthusian growth function). The most crucial element in these models is the “functional response”, the phrase that describes the rate at which the prey are consumed by a predator. The function F(P, U) describes the predators functional (behavioral) response and the function G(P, U) describes the predators (numerical) response.
There have been several famous functional response types: Holling types I–III [24, 25]; Hassell–Varley [22]; Beddington–DeAngelis [4, 13]; the Crowley–Martin [11]; the ratio–dependence [3, 30]. Of them, the Holling-type I–III were labeled “prey-dependent” and the other types which consider the interference among predators were labeled “predator-dependent” by Arditi and Ginzburg [3]. However, prey-dependent functional responses fail to model the interference among predators or, although less likely, the cooperation which is sometimes achieved, and have been facing challenges from biologists and physiologists [1, 3, 18, 27, 30]. Recently, “predator-dependent”-type models have received much support from theoretical and empirical work in biology.
Prey–predator models with predator-dependent functional responses can provide better descriptions of predator feeding than prey-dependent functional responses over a range of predator–prey abundances (as noted by Skalski and Gilliam in [36]), and in some cases, the Beddington–DeAngelis functional response performed best. The original-type prey–predator model with the Beddington–DeAngelis functional response has been proposed and well studied. This model has the form:
Motivated by this system, many scholars have proposed and studied models consisting of ordinary or functional differential equations incorporating the Beddington–DeAngelis functional responses. For instance, Hwang [28, 29] showed that the interior equilibrium of the above system is globally stable provided that it is locally asymptotically stable. Furthermore, he obtained sufficient conditions for the uniqueness of limit cycles of the system.
In recent decades, it has been demonstrated that complex dynamics can appear in continuous-time models with three or more species [17, 31, 35, 38, 41], and specifically that nonlinear dynamics, including cycles, quasicycles, and chaos, can occur in such biological systems. Although a direct link between the predators and preys cannot be established unless quantitative methods are used, the previous works clearly show that the populations of three species are often related, and a change in one species can cause a change in the others, especially predator. For example, in [34], the authors have studied the dynamical behavior of an ecological system with three species with Beddington–DeAngelis functional response. In their models, they introduce one more predator species in the model (1.1) and they have analyzed the local and global stability and the bifurcations arising in some selected situations. In addition, in [33], to understand the impact of predation by different types of predators on prey population dynamics, the authors formulate a three differential equation model describing the population dynamics of one prey and two species predator. They proposed the following model:
where g(P, H, Z) and h(P, H, Z) have been supposed Holling-type II and type III, respectively, as a functional response. They analyze the model from a thermodynamic perspective and study the thermodynamic stability of the different equilibria. Motivated by two these papers [33, 34], we consider the model which is similar to the model (1.2), but instead of the Holling-type II functional response, we consider the Beddington–DeAngelis functional response. In addition, we consider the situation in which the behavioral response term appearing in the prey equation contains a delay term, which can be regarded as a gestation period or reaction time of the predators.
The layout of this paper is as follows: the basic assumptions and the model formation are proposed in Sect. 2. In addition, in this section, the stability properties equilibria for the basic model without delay are studied. In Sect. 3, the stability properties and occurrence of Hopf bifurcation of the positive equilibrium for the system with delay are studied. In Sect. 4, some numerical simulations are presented to illustrate the analytical results. Finally, a summary is given in Sect. 5.
2 System of Equations, Equilibria, and Stability
In this section, we consider system (1.2) with a Beddington–DeAngelis and sigmoidal-type functional form as a functional responses.
We denote P(t), U(t), and V(t) as the rodent population, “specialist predator” population, and “generalist predator” population, respectively. The population dynamics are given by the following nonlinear system of ordinary differential equations:
with the initial conditions \(P(0)\equiv P_{0}>0\), \(U(0)\equiv U_{0}>0\), and \(V(0)\equiv V_{0}>0\).
The following assumptions for model (2.1) are supposed:
-
(I)
The predators of prey populations are broadly divided in two categories which is specialist and generalist predator, respectively. The specialist predators are dynamically strongly coupled with the rodent population. Since the mobility of this type of predator is very low, and they usually do not switch to the other prey, a small decrease in the density of the rodent population causes a drastic reduction in density of the specialist predators. On the contrary, the generalist predators can feed on various alternative prey in addition to the rodents. Consequently, the population density of the generalist predator is least affected by the variation in rodent population density. The Beddington–DeAngelis functional response provides a better description of predator feeding than the other functional responses, such as the Holling types. This fact has been reflected in using the Beddington–DeAngelis functional response g(P, H, Z) in our model.
-
(II)
The parameter \(r(>0)\) is the intrinsic growth rate of prey species in the absence of both the specialist and the generalist predators. The parameter \(k(>0)\) is the environmental carrying capacity of prey species. It is determined by a combination of food availability and environmental factors such as density-depended maturation and dispersal rates. Understanding the dynamical relationships between predator and prey is one of the central goals in an ecological system. One important component of the predator–prey relationship is the predator’s functional response. We apply a Beddington–DeAngelis functional response \(\frac{c_{1}PU}{P+U+d_{1}}\) to describe the effect of the specialist predator on the prey species. The parameter \(c_{1}\) is the search rate of the specialist predator on the prey species, and \(\frac{c_{1}}{d_{1}}\) is the maximum number of prey that can be eaten by the specialist predator per unit time.
-
(III)
In the system (2.1), the growth of the specialist predator population follows a logistic law with \(s(>0)\) as the predator’s intrinsic growth rate of population; the carrying capacity is taken to be dynamic and is proportional to the prey density (\(\frac{P}{\gamma }\)). The equation for the specialist predator is formulated following an interferential structure, because the “specialist predators” of the rodent are small mammals that spend most of its energy in prey hunting and other activities like surviving.
-
(IV)
The generalist predator follows a sigmoidal functional response with a low rate of predation at low prey density. The generalist predator switches from alternative prey to the rodent when the rodent density increases beyond a certain threshold. The parameter \(c_{2}\) is the rate of predation by the generalist predator and \(d_{2}\) is the half-saturation constant; e is the conversion efficiency, denoting the number of newly born of generalist predator for each captured prey species (\(0<e<1\)); m is the natural death rate of the generalist predator.
A brief description of the parameter significant and parameter values can be found in [33], in which the authors listed the following parameter values: \(r=2\), \(k=100\), \(d_{1}=10\), \(d_{2}=10\), \(s=0.45\), \(\gamma =0.44\), \(e=0.6\), \(c_{1}=0.7\), \(c_{2}=0.5\), and \(m=0.4\). For more details, the reader is referred to [33].
Here and throughout this paper, we only assume that
Hypothesis 2.1
\((i)\; c_2>m/e,\quad (ii)\;\; s>m\).
Letting \(Y=(P,U,V)^{\mathsf {T}}\), \(G:{\mathbb {R}}^{3}\longrightarrow {\mathbb {R}}^{3}\), \(G=(f_{1},f_{2},f_{3}) ^\mathsf {T}\), the system (2.1) can be rewritten as \(\frac{dY}{dt}=G(Y)\). Here, \(f_{i}\in C^{\infty }({\mathbb {R}})\) for \(i=1,2,3\) (if \(P \ne 0\)). Since the vector function G is a smooth function of the variables (P, U, V) in the positive octant \(\Omega =\{(P,U,V):P>0,U>0,V>0\}\), therefore, it is locally Lipschitz continuous in \(\Omega \), which guarantees the local existence and uniqueness of solutions of the system (2.1).
Now, we can recognize the following steady states of system (2.1):
-
The axial state: \(E_1=(k,0,0)\).
-
The boundary states are \(E_2=(P_2,U_{2},0)\) and \(E_3=(P_{3},0,V_{3})\), where
$$\begin{aligned} U_2&=\frac{P_2}{\gamma },\;\;P_{2}={\textstyle \frac{r\gamma \left( k-d_{1}\right) +k\left( r-c_{1}\right) +\sqrt{ \left( kr\gamma +rk-r\gamma d_{1}-c_{1}k\right) ^{2}+4\left( r\gamma ^{2}+r\gamma \right) \left( rk d_{1}\right) }}{2r\left( \gamma +1\right) }},\nonumber \\ P_{3}&=\sqrt{\frac{md_{2}}{ec_{2}-m}},\;\; V_{3}=\frac{erP_{3}}{m}\left( 1-\frac{P_{3}}{k}\right) . \end{aligned}$$(2.2) -
The interior state is \(E^{*}=(P^{*},U^{*},V^{*})\) with \(U^{*}=\frac{P^{*}}{\gamma }\) and
$$\begin{aligned} P^{*}=P_3,\;\; V^{*}=\frac{eP_3}{m}\left( r\left( 1-\frac{P_3}{k}\right) -\frac{c_{1}P_3}{P_3+\gamma P_3+\gamma d_{1}}\right) . \end{aligned}$$(2.3)
Notice that the boundary point \(E_2\) always exists, but the boundary point \(E_3\) exists only if \(c_{2}>\frac{m}{e}\). The interior steady state \(E^*\) exists only if \(P^*,\;U^*\) and \(V^*\) are positive, but, from (2.3), this implies that \(0<P^*<k\), since, otherwise, \(V^*<0\). Now, let
Then, it is clear that \(V^*>0\) if and only if \(f(P^*)=f(P_3)<0\). However, the positive root of \(f(P)=0\) is equal to \( P_2\). Therefore, if \(0<P^*<P_2\), then \(f(P^*)<0\). Therefore, \(E^*\) exist only if \(0<P^*=P_3<P_2\). However, this last condition is equivalent to
Now, we study the local stability around the axial state \(E_1\), the boundary state \(E_2\) (the generalist predator-free), and \(E_3\) (the specialist predator-free) equilibrium points.
First, we denote the Jacobian matrix (\(J=[J_{ij}]\)) as follows:
It can be easily seen that one of the eigenvalues of Jacobian matrix about \(E_1\) and \(E_3\) is \(\lambda =s\), and therefore, these equilibrium points are unstable. Next, we study the stability of equilibrium point \(E_2\). At this point, the Jacobian matrix takes the form:
For \(E_2\), the characteristic equation associated with (2.1) is given by the following:
It is easy to verify that one of the eigenvalues of \(J(E_2)\) is
The other two eigenvalues satisfy \( \lambda ^2-{\mathcal {A}}\lambda +{\mathcal {B}}=0\), where
It is easy to verify that \({\mathcal {A}}=0\) if \(c_1=c_1^*\) and \({\mathcal {B}}=0\) if \(c_1=\hat{c}_1\), where
Therefore, we have the following theorem:
Theorem 2.2
The steady states \(E_1\) and \(E_3\) are unstable, but \(E_2\) is asymptotically stable provided that \(c_2<c^*_2\) and \(c_{1}>\tilde{c}_1:=\max \{c^*_1,\hat{c}_1\}\). If \(0<c_{1}<\tilde{c}_{1}\) or \(c_{2}>c^{*}_{2}\) (\(\lambda _{3}>0\)), the boundary equilibrium \(E_2\) is unstable.
This Theorem implies that, when the boundary equilibrium \(E_2\) is asymptotically stable, then there is a chance for extinction of generalist predator. However, since \(E_1\) is always unstable, then there is not any chance for extinction of the specialist and generalist predator simultaneously, and since \(E_3\) is always unstable, there is no chance for extinction of specialist predator.
To state the next theorem, we need to introduce the notion of uniform persistence which is a standard definition in the context of population dynamics. It is also called cooperativeness or permanent coexistence and it means that strictly positive solutions are eventually uniformly bounded away from the boundary [6]. More technical definition is given in [8].
Definition 2.3
If there exists a compact set \(K\subseteq Int{\mathbb {R}}_{+}^{3}=\Omega \), such that all solutions of (2.1) with the initial condition in \(\Omega \) eventually enter and remain in K, then the system (2.1) is called uniformly persistent (invariant).
Theorem 2.4
Let Hypothesis 2.1 hold and \(c_2>c^*_2\), and then, system (2.1) is uniformly persistent.
Proof
We use the method of average Lyapunov function [16]. It can be easily seen that conditions of Theorem [16] are satisfied. Considering a function \(\nu (P,U,V)=PUV\), we define
Now, we prove that this function is positive at each of the boundary equilibria. Then
First, relation holds by Hypothesis 2.1. In proving \(\xi (E_2)>0\), we have used the fact that \(E^*\) exist, and therefore, \(P_2>P_3\). and \(\xi (E_3)>0\) follows using the definition of \(P_3\) and \(V_3\). \(\square \)
Remark 2.5
We notice that if \(c_2<c^*_2\) and \(c_1>\tilde{c}_1\), then \(E_2\) is asymptotically stable, but this implies that there is a neighborhood of this point in \(\Omega \), such that any solution with the initial condition in this neighborhood approaches \(E_2\). This implies that (2.1) is not uniformly persistent by definition.
Lemma 2.6
(see [8]) If \(a>0\), \(b>0\), and \(\frac{dx}{dt}\ge (\le )b-ax\), when \(t\ge 0\) and \(x(0)>0\), therefore, we have
Lemma 2.7
(see [40]) If \(a,\;b\) and \(\alpha \) are positive constants and \(\frac{\mathrm{d}x}{\mathrm{d}t}\le x(b-ax^{\alpha })\), with \(x(0)>0\), then, for any sufficiently small constant \(\epsilon >0\), there exists a positive constant T, such that
Theorem 2.8
All the solutions of the system (2.1) with the positive initial conditions \((P_{0},U_{0},V_{0})\) are uniformly bounded within \(\Omega \), and the set \(\Omega \subseteq Int{\mathbb {R}}_{+}^{3}\) is positively invariant, where
Proof
First of all, it is clear that the \(U=0\)-axis and the \(V=0\)-axis are invariant. Assume that (P(t), U(t), V(t)) is an arbitrary positive solution of system (2.1); then, the first equation of system (2.1) can yield:
From Lemma 2.7, we get that there exists a constant \(T_{1}>0\), such that \(P(t)\le k+\epsilon _1:=M_{P}\), for any small constant \(\epsilon _1>0\) and for \(t\ge T_{1}\).
Similarly, from the second equation of system (2.1) and Lemma 2.7, there exist two positive constants \(M_{U}\) and \(T_{2}>0\), such that
for \(t\ge T_{2}\) and \(\epsilon _2>0\).
Defining that \(\chi (t)=P(t)+U(t)+\frac{V(t)}{e}\), then we get:
Thus, \(\dot{\chi }+m\chi \) is bounded by W. According to Lemma 2.6, we have:
Therefore, \(\chi (t)\) is ultimately bounded, and if follows that each positive solution of system (2.1) is uniformly ultimately bounded. Hence, there are two positive constants \(M_{V}\) and \(T_{3}\), such that \(V(t)\le M_{V}\), for \(t\ge T_{3}\). Let \(T=\max \big \{T_{1},T_{2},T_{3} \big \}\), and then, we have \(0<P(t)\le M_{P}\), \(0\le U(t)\le M_{U}\) and \(0\le V(t)\le M_{V}\) for \(t\ge T\). This ensures the existence of a compact set \(\Omega \) which is a proper subset of \({\mathbb {R}}_{+}^{3}\), such that as \(t\longrightarrow \infty \), the solutions of (2.1) will be always within the set \( \Omega \). Thus, the system (2.1) is dissipative. The proof of the theorem is completed. \(\square \)
Notice that there is a chance for extinction of the generalist predator depending on the predation rates.
Next, we study the interior equilibrium point \(E^{*}\). The Jacobian matrix about this equilibrium \(J_{E^{*}}=[j_{i,k}]_{3\times 3}\) is as follows:
Then, the characteristic equation is given by \(h(\lambda )=: \lambda ^3+{\mathcal {A}}^*\lambda ^2 +{\mathcal {B}}^* \lambda +{\mathcal {C}}^*\), where
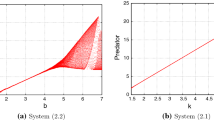
First, we notice that, for \(c_2=c_2^*\), \(V^*=0\), and therefore, \({\mathcal {C}}^*=0\). This implies that one of the eigenvalues of \(E_2\) and \(E^*\) is zero and steady states \(E_2\) and \(E^*\) coalesce, and we expect forward bifurcation (see Fig. 1). In addition, we recall that the interior point \(E^*\) exists when \(c_{2}>c_2^*\). In this case, it is clear that \({\mathcal {C}}^*>0\). Now, if we assume that \(s>j_{11}\), that is
then \({\mathcal {A}}^*>0\). By the Routh–Hurwitz criteria, all of the roots of the equation \(h(\lambda )=0\) have negative real parts if and only if \(\mathcal {D^*}:={\mathcal {A}}^*{\mathcal {B}}^*-{\mathcal {C}}^*>0\). However, this holds if and only if:
However, this is equivalent to
Now, we can consider the following cases:
-
(a)
\(j_{11}\le 0\). In this case, \({\mathcal {A}}^*>0, {\mathcal {C}}^*>0\), also \(\hat{A},\; \hat{B}\) and \(\hat{C}\) are negative, this implies that \( {\mathcal {D}}^*>0\); therefore, \(E^*\) is asymptotically stable.
-
(b)
\(0<j_{11} <s\). Similar to case a, we have \({\mathcal {A}}^*>0, {\mathcal {C}}^*>0\). To consider the sign of \( {\mathcal {D}}^*\), we need to consider two subcases:
-
(b1)
\(j_{11}+\frac{j_{12}}{\gamma } <0\) (\(\hat{A}<0, \hat{B}>0\) and \(\hat{C}>0\)). Let us denote the discriminant of k by \(\Delta :=\hat{B}^2-4\hat{A}\hat{C}\), it is easy to see that in this case \(\Delta >0\) and there is a unique positive \(s^*\), such that \(k(s^*)=0\), where \(s^*= \frac{-\hat{B}+\sqrt{\Delta }}{2\hat{A}}\). Therefore, \( {\mathcal {D}}^* =0\) for \(s=s^*\), \( {\mathcal {D}}^*>0\) for \(s>s^*\) and \( {\mathcal {D}}^*<0\) for \(s<s^*\). Thus, \(E^*\) is asymptotically stable for \(s>s^*\) and it is unstable for \(s<s^*\).
-
(b2)
\(j_{11}+\frac{j_{12}}{\gamma } >0\) (\(\hat{A}>0, \hat{B}<0\) and \(\hat{C}>0\)). In this case, all roots of k (if any) are positive:
-
(i)
\(\Delta <0\), then k(s) has no roots and it is positive for all s. Therefore, \(E^*\) is unstable.
-
(ii)
\(\Delta =0\), then k(s) has a double positive root \(s=\frac{-\hat{B}}{2\hat{A}}=\frac{j_{11}}{2}<j_{11}\), but this is not possible by our assumption. Therefore, \(k(s)>0\) for all s. This implies that \(E^*\) is unstable.
-
(iii)
\(\Delta >0\), then k(s) has two positive roots \(s^{\pm }= \frac{-\hat{B}\pm \sqrt{\Delta }}{2\hat{A}}\), such that \(k(s^{\pm })=0\). Therefore, \(k(s)<0\) for all \( s^{-}<s<s^{+}\) and \(E^*\) is asymptotically stable. However, we show that this can not happen either. By assumption \(s-j_{11}>0\), but we show below that \(s-j_{11}<0\), for all \( s^{-}<s<s^{+}\). For this, we calculate \(s^+-j_{11}\):
$$\begin{aligned} s^+-j_{11}&=\frac{-\hat{B}\pm \sqrt{\hat{B}^2-4\hat{A}\hat{C}}}{2\hat{A}}-j_{11}\\&=\frac{-j_{11}\hat{A}\pm \sqrt{j_{11}^2\hat{A}^2+4\hat{A}j_{11}j_{13}j_{31}}}{2\hat{A}}\\&=-\frac{j_{11}}{2}+\frac{1}{2\hat{A}}\left( \sqrt{j_{11}^2\hat{A} 2\left( 1+\frac{4j_{13}j_{31}}{\hat{A}j_{11}} \right) }\right) \\&<-\frac{j_{11}}{2}+\frac{1}{2\hat{A}}\left( \sqrt{j_{11}^2\hat{A}^2(1+0)}\right) =0, \end{aligned}$$where, in the second equality, we used \(\hat{B}=-j_{11}\hat{A}\) and \(\hat{C}=-j_{11}j_{13}j_{31}\), also in last inequality, we have used the fact that \(j_{13}j_{31}<0\). Therefore, \(s>s^+\) and at least one of the eigenvalues have positive real parts. Thus, \(E^*\) is unstable. In this case, it is impossible to have \( {\mathcal {A}}^*{\mathcal {B}}^*-{\mathcal {C}}^*=0 \) either, since this term can be zero only if \(s=s^\pm \). However, we can simply see that at \(s=s^\pm \), \({\mathcal {A}}^*<0\).
-
(i)
-
(b1)
-
(c)
\(j_{11} >s\). Then, \({\mathcal {A}}^*<0\). This implies that at least one of the eigenvalues of \(E^*\) has positive real parts, and therefore, it is unstable.

One-parameter bifurcation diagrams for system (2.1) produced by Auto, with \(c_2\) as the bifurcation parameter, showing a transcritical bifurcation of \(E_2\) and \(E^*\) at \(c^*_2= 0.68160\). Other parameter values are \(r=2\), \( k=100\), \(d_{1}=10\), \(d_{2}=10\), \(\gamma _{1} =0.44\), \(e=0.6\), \(m=0.4\), and \(s=0.45\). All panels show \(c_2\) on the horizontal axis, while the vertical axes are P, U, and V in the left, middle, and right panels, respectively. Solid red lines correspond to branches of stable equilibria, and solid black lines to unstable equilibria. The portions of branches corresponding to \(V<0\) have no significance in the model, but are shown to clarify the transcritical bifurcation and change of stability
Now suppose \(J(E^*)\) has a pair of purely imaginary roots \(\lambda _{2,3}=\pm i\omega \). Then, \(h(\lambda )\) should be in the following form:
It is easy to verify that holds only if \({\mathcal {B}}^*=\omega ^{2}\) and \({\mathcal {C}}^*={\mathcal {A}}^*\omega ^{2}\). Since \({\mathcal {C}}^*>0\), this implies that \( {\mathcal {A}}^*>0,\;{\mathcal {B}}^*>0 \) and \({\mathcal {D}}^*=0\). Therefore, we can easily exclude Cases a and c.
Now, we consider Case b2; suppose that \({\mathcal {D}}^*= 0\); then, \(s=s^\pm \), but, in this case \({\mathcal {A}}^*<0\), so \(J(E^*)\) cannot have a pair of pure imaginary eigenvalues.
However, in the Case b1, \({\mathcal {D}}^*\) is zero for \(s=s^*\), all of these conditions are satisfied and \(J(E^*)\) has a pair of pure imaginary eigenvalues. Taking s as a parameter, the roots of \(h(\lambda )=0\) in a neighborhood of \(s=s^*\) will be
To consider Hopf bifurcation as s passes through \(s^*\), first, we find \((\frac{\mathrm{d}{\text {Re}}\lambda (s)}{\mathrm{d}s})|_{s=s^*}\). By differentiating equation \(h(\lambda )\) with respect to s, we obtain
Therefore
If we suppose \(\frac{\mathrm{d}\big ({\mathcal {A}}^*(s){\mathcal {B}}^*(s)-{\mathcal {C}}^*(s)\big )}{\mathrm{d}s}|_{s=s_{crit}}\ne 0\), then \((\frac{\mathrm{d}({\text {Re}}\lambda (s))}{\mathrm{d}s})|_{s=s_{crit}}\ne 0\). Therefore, the system (2.1) will undergo a Hopf bifurcation.
It is easy to verify that using equations \(h(\lambda )\) and k(s), we have
In addition, from \({\mathcal {A}}^*{\mathcal {B}}^*-{\mathcal {C}}^*=0\), we get \(s\hat{A}+\hat{B}+\frac{\hat{C}}{s}=0\). Then, we can rewrite (2.11) as follows:
Therefore, from the above discussion about the stability of \(E^*\), we have one case; if \(j_{11}>0\) and \(j_{11}<-\frac{j_{12}}{\gamma }\), then \(\hat{A}<0\), \(\hat{B}>0\) and \(\hat{C}>0\). Since \(\Delta := \hat{B^{2}}-4\hat{A}\hat{C}>0\), the equation \(\hat{A}s^2+\hat{B}s+\hat{C}=0\) has two real roots \(s_1\) and \(s_2\) which are negative and positive, respectively. Let \(s_2=s^*\) be a positive root and the critical value. Then, in this case, the sign of equation (2.12) is negative, and hence, \((\frac{\mathrm{d}({\text {Re}}\lambda (s))}{\mathrm{d}s})|_{s=s_{crit}}\ne 0\) and by Theorem 11.12 of [20], the system (2.1) undergoes a Hopf bifurcation.
Summarizing the above discussions, we arrive at the following theorem.
Theorem 2.9
There exists a positive number \(s^{*}\), such that, for \(s^{*}<s\), the interior equilibrium point \(E^{*}=(P^{*},U^{*},V^{*})\) is locally asymptotically stable. In addition, if \({\mathcal {B}}^*=\omega ^{2}\), \({\mathcal {C}}^*={\mathcal {A}}^*\omega ^{2}\) (or \({\mathcal {A}}^*{\mathcal {B}}^*-{\mathcal {C}}^*=0\)) and \(\frac{\mathrm{d}\big ({\mathcal {A}}^*{\mathcal {B}}^*-{\mathcal {C}}^*\big )}{\mathrm{d}s}|_{s=s_{crit}=s^*}\ne 0\), then the system (2.1) undergo a Hopf bifurcation about the interior equilibrium point \(E^{*}\) for \(s=s_{crit}\).
Remark 2.10
To prove the uniqueness of the bifurcated limit cycle, also we need that the first Lyapunov coefficient be nonzero (non-degeneracy condition). Here, we only show that a family of one-parameter limit cycles are bifurcated from the steady state \(E^*\). Also by numerical simulations, we support our analytical proof and demonstrate the dynamical behavior of the bifurcated limit cycles.
3 Mathematical Analysis of a DDE Model
In this section, we consider a model with an inherent time delay and analyze the stability properties. Here, we construct the following delay model. In this model, the parameter \(\tau \) represents a time delay and the term \(\frac{c_{1}P(t-\tau )U(t-\tau )}{P(t-\tau )+U(t-\tau )+d_{1}}\) denotes the loss of the prey population to the “specialist” predator:
In the next section, we are interested in the existence of solutions of Eq. (3.1) which are bounded by positive functions.
The following theorem together with Lemma 2.7 will be used to prove the main results in the next section. The theorem is concerned with the existence of solutions of a delay differential equation of the form:
With respect to (3.2), we shall assume the following:
-
1.
\(T, q \in C([t_0, \infty ],[0, \infty ]), q(t)\ne 0, p\in C([t_0,\infty ],{\mathbb {R}})\),
-
2.
T is increasing, \(T(t)<t\) and \({\lim T(t)}_{t\rightarrow \infty }=\infty \).
We have the following theorem, which gives the conditions for the existence of positive solutions for Eq. (3.2).
Theorem 3.1
Suppose that, for \(t\ge t_0\):
and
Then, Eq. (3.2) has a positive solution (see [14]).
3.1 Well-Posedness of the Model
The model (3.1) should be associated with nonnegative initial values:
The existence and uniqueness of solutions of (3.1) can be easily established by the standard method of steps. Now, when the initial values are nonnegative and the compatibility condition (3.4) holds, we can confirm the well-posedness in the sense stated in the following lemma.
Lemma 3.2
If the conditions (3.4) are satisfied, then the solutions of (3.1) are positive and are ultimately bounded.
Proof
Invariance of solutions \(U(t)=V(t)=0\) under the flow of system (3.1) implies that U(t) and V(t) components of all the solutions with positive initial condition (3.4) remain positive for all time.
Using the positivity of U(t) and V(t), we show that P(t) is bounded. From equation of P(t) in (3.1) and using the initial condition (3.4), we obtain
From Lemma (2.7), we get that there exists a constant \(T_{1}>0\), such that \(P(t)\le k+\epsilon _1=\mu +\epsilon _1=M_{P}\), for any small constant \(\epsilon _1>0\) and for \(t\ge T_{1}\). Repeating the argument, by methods of steps, we obtain the boundedness of P(t) in \([\tau , 2\tau ]\), \([2\tau , 3\tau ]\), ..., and hence, for all \(t \ge 0\).
Since P(t) is bounded, from equation of U in (3.1), we obtain
Then, according to Lemma 2.7, there exists a constant \(T_{2}>0\), such that \(U(t)\le \frac{M_P}{\gamma }+\epsilon _2:=M_U\), for any small constant \(\epsilon _2>0\) and for \(t\ge T_{2}\).
Furthermore, by defining \(\chi (t)=P(t)+U(t)+\frac{V(t)}{e}\), we get:
Thus, \(\dot{\chi }+m\chi \) is bounded. According to Lemma 2.6, we have:
Therefore, \(\chi (t)\) is ultimately bounded by W. Hence, there are two positive constants \(M_{V}\) and \(T_{3}\), such that \(V(t)\le M_{V}\), for \(t\ge T_{3}\). Let \(T=max\big \{T_{1},T_{2},T_{3} \big \}\), and then, we have \(P(t)\le M_{P}\), \(0\le U(t)\le M_{U}\) and \(0\le V(t)\le M_{V}\) for \(t\ge T\). Repeating the argument by methods of steps, we obtain the boundedness of V(t) in \([\tau , 2\tau ]\), \([2\tau , 3\tau ]\), ..., and hence, for all \(t \ge 0\) indeed. Thus, it only remains to show the positivity of P(t). Since we show P(t), U(t), and V(t) are bounded and using the conditions (3.4) and according to positivity of U(t) and V(t), from equation of P(t) in (3.1), we obtain:
Now, consider the delay differential equation for \(t\in [0,\tau ]\):
Let \(p(t) = \frac{rM_P}{k}+\frac{c_2M_PM_V}{d_2}-r:=\mu \), \(q(t) = \frac{c_1M_U}{d_1}:=\alpha \), \(T(t) = t-\tau \). Using these assumptions, it is easy to verify that the conditions of Theorem 3.1 are satisfied. Then, according to Theorem 3.1, there is a positive solution of (3.5) for \(t\in [0,\tau ]\). Therefore, by these assumptions and repeating the argument by methods of steps, we obtain the positivity of P(t) in \([\tau ,2\tau ]\), \([2\tau , 3\tau ]\), ..., and hence, for all \(t\ge 0\), indeed. Then, the proof of the lemma is completed. \(\square \)
3.2 Stability Analysis of Equilibria
The equilibria of the system (3.1) are \(E_1=(k,0,0)\), \(E_2=(\gamma U_{2},U_{2},0)\), \(E_3=(P_{3},0,V_{3})\) (refer to Eq. (2.2)) and \(E^{*}=(P^{*},U^{*},V^{*})\) (refer to Eq. (2.3)). The linearization of the above system (3.1) is
where
Now, we analyze the stability of the equilibria. First, we consider the equilibria \(E_1=(k,0,0)\) and \(E_3=(P_{3},0,V_{3})\). We know that the characteristic equation is given by \(\det (\lambda I-A_{1}-A_{2}e^{-\lambda \tau })=0\). However, in these two cases, \(\det (\lambda I-A_{1}-A_{2}e^{-\lambda \tau })=\det (\lambda I-A_{1})=0\), and hence, the delay has no effect on the system and results hold as before. In other words, the equilibria \(E_1\) and \(E_3\) remain unstable.
Now, we discuss the stability of the equilibrium \(E_2=(\gamma U_{2},U_{2},0)\). At this equilibrium, \(A_{1}\) and \(A_{2}\) take the form:
It is easy to verify that one of the eigenvalues is
Then, for \(0<c<c^{*}_{2}\), \(\lambda _{3}<0\). The other eigenvalues satisfy
where
For \(\tau =0\), the characteristic Eq. (3.6) becomes
We know that \(a+b=-{\mathcal {A}}\) and \(c+d={\mathcal {B}}\), and thus, for \(c_1>\tilde{c_1}\), \(c_2<c_2^{*}\), we have \(a+b>0\) and \((c+d)>0\), and as we expected, \(E_{2}\) is asymptotically stable.
Now, for \(\tau \ne 0\), if \(\lambda =i\omega \) is a root of Eq. (3.6), then we have
Equating the real and imaginary parts of (3.7) to zero, we have
From (3.8), we obtain the fourth-order equation for \(\omega \):
The roots are
There exist two cases of interest [9].
-
1.
If \(c^{2}<d^{2}\), then there is a pair of one imaginary solution, \(\lambda =i\omega _{+}\), \(\omega _{+}>0\).
-
2.
If \(c^{2}>d^{2}\), then there exist two pairs of imaginary solutions, \(\lambda =i\omega _{\pm }\), with \(\omega _{+}>\omega _{-}>0\), provided that \(b^{2}-a^{2}+2c>0\) and \((b^{2}-a^{2}+2c)^{2}>4(c^{2}-d^{2})\), and no such solutions otherwise.
Now, without loss of generality, we suppose that there is a unique positive solution \(\omega _{+}\) for Eq. (3.9). Substituting \(\omega _{+}\) into (3.8) and solving for \(\tau \), we get
Differentiating equation (3.6) respect \(\tau \), we obtain
and therefore, we have
Using \(e^{\lambda \tau }=\frac{-(d+b\lambda )}{\lambda ^{2}+a\lambda +c}\), we can obtain
which is positive. Therefore, we can say that, when \(\tau \) crosses \(\tau _{n}\) (\(\tau =\tau _{n}\)) for every n, the characteristic Eq. (3.6) has a pair of purely imaginary roots \(\pm i\omega _{+}\), and \(\alpha _{1}(\lambda )\) is positive, then a Hopf bifurcation occurs, and a nontrivial periodic solution appears; when \(\tau _{n}<\tau <\tau _{n+1}\), the characteristic Eq. (3.6) has \(n+1\) pair of eigenvalues with positive real parts, the others with negative real parts. Therefore, the equilibrium \(E_2\) becomes unstable at the smallest value of \(\tau _n\).
Theorem 3.3
(See [9]) If there is no imaginary root for (3.6), then the stability of the solution \(E_2\) does not change as \(\tau \) is increased.
If there is one pair of imaginary roots for (3.6), the stable solution for \(\tau =0\) becomes unstable at the smallest value of \(\tau _n\).
If there are two pairs of imaginary roots for (3.6), then the stability of the trivial solution can change a finite number of times as \(\tau \) is increased, and eventually, it becomes unstable for all sufficiently large \(\tau \).
Remark 3.4
Notice that if \(E_2\) is an internal equilibrium, when \(\tau =\tau _{j}\), a Hopf bifurcation will appear and a nontrivial periodic solution around the equilibrium \(E_2\) will arise; however, we do not know if system (3.1) has a nontrivial periodic solution around the equilibrium \(E_2\) inside the accepted biological region.
We shall now investigate the dynamics of the delay system (3.1) around the internal equilibrium \(E^{*}=(P^{*},U^{*},V^{*})\), which exists if
(according to Sect. 2), and when \(\tau =0\), \(E^{*}\) is stable.
At \(E^{*}\), for \(\tau >0\), \(A_{1}\) and \(A_{2}\) have the following form, respectively:
Then, the characteristic equation is given by the following:
where
When \(\tau =0\), the characteristic Eq. (3.12) is given by the following:
By comparison with Eq. \(h(\lambda )\) and according to the conclusion of Sect. 2, we obtain \(C\equiv (a_{5}+a_{6})=a_{5}\). There exist also three eigenvalues with negative real parts for Eq. (3.13).
When \(\tau >0\), let \(\lambda (\tau )=\alpha (\tau )+i\omega (\tau )\) be a root of Eq. (3.12) satisfying \(\alpha (\tau ^{*})=0\), \(\lambda (\tau ^{*})=i\omega (\tau ^{*})=i\omega \) for some \(\tau ^{*}>0\). If \(\lambda =i\omega \) is a root, then \(\omega \ne 0\) and
Equating the real and imaginary parts of (3.14) to zero, we have
It follows from (3.15) that
Denote
and let \(\omega ^{2}:=\xi \), and then, Eq. (3.16) becomes
Denote \(h(\xi )=\xi ^{3}+A_{1}\xi ^{2}+B_{1}\xi +C_{1}\). Then, we have
From (3.15), we get
Now, we discuss the stability of the internal equilibrium \(E^{*}\) according to the number of positive roots for Eq. (3.16). Notice, if \(a_{6}=0\), then \(C_{1}=a_{5}^{2}>0\). Therefore, the number of different imaginary roots of the characteristic Eq. (3.12) can be zero, one (pair of roots), or two. If Eq. (3.16) has a pair of positive roots with double multiplicity \(\omega _{1}^{2}=\xi _{1}\), then \(h^{^{\prime }}(\xi _{1})=0\):
and the transversality condition does not hold. Thus, the direction of movement of the eigenvalue with increasing \(\tau \) depends on the higher derivatives, and we omit details for this case. Hence, there are two cases of interest:
-
(I)
Equation (3.16) has no positive roots. Then, there are no purely imaginary roots for characteristic Eq. (3.12) and the number of eigenvalues with positive real parts of the characteristic Eq. (3.12) does not change when the time delay \(\tau \) is increased [9]. For all \(\tau \ge 0\), the linearized equation at the equilibrium \(E^{*}\) has no eigenvalue with positive real part, and all the eigenvalues have negative real parts. Therefore, the equilibrium \(E^{*}\) is stable.
-
(II)
There are two positive roots
$$\begin{aligned} \omega _{1}=\sqrt{\xi _{1}}, \quad \omega _{2}=\sqrt{\xi _{2}} \end{aligned}$$for Eq. (3.16), with \(\begin{vmatrix}\omega _{2}\end{vmatrix}>\begin{vmatrix}\omega _{1}\end{vmatrix}\). In this case, using Eq. (3.15), the two sets of values of \(\tau \) for which there exist imaginary roots are
$$\begin{aligned} \tau _{1,n}=\frac{1}{\omega _{1}}\arccos \left\{ \frac{(a_{4}-a_{1}a_{2})\omega _{1}^{4}+(a_{1}a_{6}-a_{4}a_{3}+a_{2}a_{5})\omega _{1}^{2}-a_{5}a_{6}}{a_{4}^{2}\omega _{1}^{2}+(a_{2}\omega _{1}^{2}-a_{6})^{2}}\right\} +\frac{2n\pi }{\omega _{1}},\\ \tau _{2,n}=\frac{1}{\omega _{2}}\arccos \left\{ \frac{(a_{4}-a_{1}a_{2})\omega _{2}^{4}+(a_{1}a_{6}-a_{4}a_{3}+a_{2}a_{5})\omega _{2}^{2}-a_{5}a_{6}}{a_{4}^{2}\omega _{2}^{2}+(a_{2}\omega _{2}^{2}-a_{6})^{2}}\right\} +\frac{2n\pi }{\omega _{2}}, \end{aligned}$$(\(n=0,1,2,\ldots \)). The quantity of interest is again the sign of the derivative of \({\text {Re}}\lambda \) with respect to \(\tau \) at the points where \(\lambda \) is purely imaginary. From Eq. (3.12), we have
$$\begin{aligned} \alpha _{2}(\lambda ):=\left( \frac{\mathrm{d}\lambda }{\mathrm{d}\tau }\right) ^{-1}&=\frac{e^{\lambda \tau }(3\lambda ^{2}+2a_{1}\lambda +a_{3})+2a_{2}\lambda +a_{4}}{(a_{2}\lambda ^{2}+a_{4}\lambda +a_{6})\lambda }-\frac{\tau }{\lambda },\\ e^{\lambda \tau }&=\frac{-(a_{2}\lambda ^{2}+a_{4}\lambda +a_{6})}{\lambda ^{3}+a_{1}\lambda ^{2}+a_{3}\lambda +a_{5}}. \end{aligned}$$Thus
$$\begin{aligned}&\alpha _{2}(\lambda )=\mathrm{sign}\left\{ \frac{\mathrm{d}({\text {Re}}\lambda )}{\mathrm{d}\tau }\right\} _{\tau =\tau _{n}}\\&=\mathrm{sign}\left\{ {\text {Re}}\left( \frac{\mathrm{d}\lambda }{\mathrm{d}\tau }\right) ^{-1}\right\} _{\lambda =i\omega }\\&=\mathrm{sign}\left\{ {\text {Re}}\left[ \frac{-(3\lambda ^{2}+2a_{1}\lambda +a_{3})}{\lambda (\lambda ^{3}+a_{1}\lambda ^{2}+a_{3}\lambda +a_{5})}\right] _{_{\lambda =i\omega }}+{\text {Re}}\left[ \frac{2a_{2}\lambda +a_{4}}{\lambda (a_{2}\lambda ^{2}+a_{4}\lambda +a_{6})}\right] _{_{\lambda =i\omega }}\right\} \\&=\mathrm{sign}\left\{ \frac{(\omega ^{2}-a_{3})(3\omega ^{2}-a_{3})+2a_{1}(a_{1}\omega ^{2}-a_{5})}{\omega ^{2}(\omega ^{2}-a_{3})^{2}+(a_{1}\omega ^{2}-a_{5})^{2}}-\frac{a_{4}^{2}+2a_{2}(a_{2}\omega ^{2}-a_{6})}{a_{4}^{2}\omega ^{2}+(a_{2}\omega ^{2}-a_{6})^{2}}\right\} .\\&\text {Now by substituting }\omega ^2=\xi \text { we get}\\&\mathrm{sign}\left\{ \frac{3\xi ^{2}+2(a_{1}^{2}-2a_{3}-a_{2}^{2})\xi +(a_{3}^{2}-2a_{1}a_{5}-a_{4}^{2}+2a_{2}a_{6})}{(a_{2}\xi -a_{6})^{2}+a_{4}^{2}\xi }\right\} \\&=\mathrm{sign}\left\{ \frac{h^{^{\prime }}(\xi )}{\beta }\right\} =\mathrm{sign}\{h^{^{\prime }}(\xi )\}, \end{aligned}$$where
$$\begin{aligned} \beta :=(a_{2}\xi -a_{6})^{2}+a_{4}^{2}\xi . \end{aligned}$$Since \(h^{^{\prime }}(\xi _{1})<0\) and \(h^{^{\prime }}(\xi _{2})>0\), we have
$$\begin{aligned} \mathrm{sign}\ \alpha _{2}(\omega _{1})= \mathrm{sign}\left\{ {\text {Re}}\left( \frac{\mathrm{d}\lambda }{\mathrm{d}\tau }\right) ^{-1}\right\} _{\lambda =i\omega _{1}}=\mathrm{sign}\{h^{^{\prime }}(\xi )\}_{\xi =\xi _{1}}<0,\\ \mathrm{sign}\ \alpha _{2}(\omega _{2})=\mathrm{sign}\left\{ {\text {Re}}\left( \frac{\mathrm{d}\lambda }{\mathrm{d}\tau }\right) ^{-1}\right\} _{\lambda =i\omega _{2}}=\mathrm{sign}\{h^{^{\prime }}(\xi )\}_{\xi =\xi _{2}}>0. \end{aligned}$$Since characteristic Eq. (3.12) with \(\tau =0\) has three negative eigenvalues, and \(\tau _{2,0}<\tau _{1,0}\), then, when \(0<\tau <\tau _{2,0}\), the characteristic Eq. (3.12) has three eigenvalue with negative real parts, and thus, the equilibrium \(E^{*}\) is stable; when \(\tau =\tau _{2,0}\), the characteristic Eq. (3.12) has a pair of purely imaginary roots \(\pm i\omega _{2}\), and sign \(\alpha _{2}(\omega _{2})\) is positive, then a Hopf bifurcation occurs, and a nontrivial periodic solution appears; when \(\tau _{2,0}<\tau <\tau _{1,0}\), the characteristic Eq. (3.12) has a pair of eigenvalues with positive real parts, the others with negative real parts, and hence, the equilibrium \(E^{*}\) is unstable; when \(\tau =\tau _{1,0}\), the characteristic Eq. (3.12) has a pair of purely imaginary roots \(\pm i\omega _{1}\), and \(\alpha _{2}(\omega _{1})\) is negative, and hence, another Hopf bifurcation occurs, and a nontrivial periodic solution bifurcates from the equilibrium \(E^{*}\); when \(\tau _{1,0}<\tau <\tau _{2,1}\), the characteristic Eq. (3.12) has three eigenvalues with negative real parts, then the equilibrium \(E^{*}\) is stable; when \(\tau =\tau _{2,1}\), the characteristic Eq. (3.12) has a pair of purely imaginary roots \(\pm i\omega _{2}\), and \(\alpha _{2}(\omega _{2})>0\), the a Hopf bifurcation occurs, and a nontrivial periodic solution exists for \(\tau \) near \(\tau _{2,1}\), and so on. It may be noted here that sign of \(\alpha _{2}(\lambda )\) at \(\pm i\omega _{2}\) is positive and sign of \(\alpha _{2}(\lambda )\) at \(\pm i\omega _{1}\) is negative, then after one cycle, the number of eigenvalues with positive real parts does not change. Therefore, if there are two imaginary roots, then the stability of the solution can change a finite number of times, as \(\tau \) is increased, and eventually for all sufficiently large \(\tau \), it becomes unstable.



Numerical simulation of the model (2.1) with predation rates \(c_1=2.6\) and \(c_2=0.5\) around the boundary state \(E_2\) with the initial conditions (7, 20, 0.001). The time t is plotted along the horizontal axis and the populations are plotted along the vertical axis. The figure shows stable behavior around \(E_2\)

Numerical simulation of the model (2.1) with an increased “generalist” predator rate \(c_1=0.8\) and \(c_2=1\), around the boundary state \(E_2=(76.626,174.15,0)\) with the initial conditions (76, 175, 0.001). The time t is plotted along the horizontal axis and the populations are plotted along the vertical axis. The figure shows unstable behavior around \(E_2\) and periodic oscillations

Numerical simulation of the model (2.1) with parameter values (4.1) and with predation rates \(c_1=2.6\) and \(c_2=1.1\), and boundary state \(E_3\), with the initial condition (3.5, 0.001, 11). The time t is plotted along the horizontal axis and the populations are plotted along the vertical axis. The figure shows unstable behavior around \(E_3\)

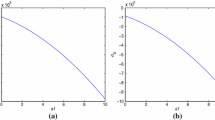
Numerical simulation of the model (2.1) with parameter values (4.1) and with \(c_1=2.6\) and \(c_2=1.8\). The interior state \(E^*\) is (2.4254, 5.5123, 4.1928) and initial conditions are (4, 6.8, 5.8). Panel (a) shows the trajectory in three dimensions and panel (b) shows populations as function of time t. The simulation shows the stability of \(E^*\)

Numerical simulation of the model (2.1) with parameter values (4.1) except \(s=0.6\), and with \(c_1=2.6\) and \(c_2=1.1\). The interior state \(E^*\) is (3.9224, 8.9145, 5.3346) and initial conditions are (3.9, 8.9, 5.3). Panel (a) shows the trajectory in three dimensions and panel (b) shows populations as function of time t. The simulation shows instability of \(E^*\)

Numerical simulation of the model (2.1) with parameter values (4.1) except \(s=0.66\), and with \(c_1=2.6\) and \(c_2=1.1\). The interior state \(E^*\) is (3.9224, 8.9145, 5.3346) and initial conditions are (3.9, 8.9, 5.3). Panel (a) shows the trajectory in three dimensions and panel (b) shows populations as function of time t. The simulation shows the oscillations of \(E^*\)

Numerical simulation of the model (2.1) with parameter values (4.1) except \(s=0.663\), and with \(c_1=2.6\) and \(c_2=1.1\). The interior state \(E^*\) is (3.9224, 8.9145, 5.3346) and initial conditions are (3.9, 8.9, 5.3). Panel (a) shows the trajectory in 3 dimension and panel (b) shows populations as function of time t. The simulation shows Hopf bifurcation of \(E^*\)

Numerical simulation of the model (2.1) with parameter values (4.1) except \(s=0.9\), and with \(c_1=2.6\) and \(c_2=1.1\). The interior state \(E^*\) is (3.9224, 8.9145, 5.3346) and the initial conditions are (3.9, 8.9, 5.3). Panel (a) shows the trajectory in three dimensions and panel (b) shows populations as function of time t. The simulation shows stability of \(E^*\)

Numerical simulation of the DDE model (3.1) with parameter values (4.1) with \(c_1=2.6\) and \(c_2=1.1\) and time delay \(\tau =0.4\). The boundary equilibrium \(E_2\) is (21.128, 48.019, 0) and the initial conditions are \((76,174,1\times 10^{-7})\). The simulation shows periodic oscillations of \(E_2\)

Numerical simulation of the DDE model (3.1) with parameter values (4.1) with \(c_1=2.6\) and \(c_2=1.1\) and time delay \(\tau =0.2\), \(\tau =0.4\), \(\tau =0.7\), and \(\tau =1\), respectively. The interior equilibrium \(E^*\) is (3.9224, 8.9145, 5.3346) and the initial conditions are (3.9, 8.9, 5.3). The simulation shows Hopf bifurcation of \(E^*\)
4 Numerical Simulations
In this section, we study the complex dynamics of the system (2.1) which are obtained numerically for a biologically feasible range of parameter values. We set the following parameters ( [21, 37]):
For these parameter values, we have the steady state \(E_1=(100,0,0)\). We also put
and have \(E_2=(21.128,48.019,0)\), \(E_3=(3.92240,0,11.305)\). We will vary the parameters \(c_{1}\) and \(c_{2}\) while keeping other parameters fixed as in (4.1). We have also the unique interior equilibrium \(E^{*}=(3.9224,8.9145,5.3346)\), which is computed for these values of \(c_{1}\) and \(c_{2}\). (Let \(c_{1}=0.7\) and \(c_{2}=1.35\). Then, with these values of parameter, \(E_1=(100,0,0)\), \(E_2=(76.626,174.15,0)\), \(E_3=(3.1235,0,9.0778)\), and \(E^{*}=(3.1235,7.0989,7.9264)\)).
In our analytical study, we observed that the \(U=0\) plane and the \(V=0\) plane are invariant. The phase planes of the system (2.1), in the absence of “specialist” (U) and “generalist” (V) predator, are shown in Figs. 2 and 3, respectively.
In Sect. 2, we point out that the two boundary states \(E_2\) and \(E_3\) and the unique interior steady state \(E^{*}\) are the most important equilibrium points from the ecological perspective. Hence, we put an emphasis on these in our numerical study.
The boundary state \(E_2\), which is without the “generalist” predator, will be locally stable when \(c_1\) and \(c_2\) satisfy the inequalities (2.7). Thus, with the above parameter values, we have \(-1.5360<c_1\) and \(c_2<0.66781\). The time series with \(c_1\) and \(c_2\) satisfying these inequalities, is shown in Fig. 4 which demonstrates the stability of \(E_2\). We change \(c_1\) and \(c_2\) over the range of values to see how their values affect the dynamics. Let \(c_{1}=0.8\) and \(c_{2}=1\). By Theorem 2.2, with these value of parameters \(c_{1}\) and \(c_{2}\), the equilibrium \(E_2\) is unstable. This is shown in Fig. 5, which exhibits fluctuations for all the species.
Then, we consider \(E_3\) and we simulate the equations around this point with the initial conditions \(P(0)=3.5\), \(U(0)=0.001\), and \(V(0)=11\). According to Theorem 2.2, the boundary equilibrium \(E_3\) is always unstable. In Fig. 6, we have \(c_1=2.6\) and \(c_2=1.1\). The figure shows unstable behavior around this boundary equilibrium point.
We also have simulated the model around the interior steady state \(E^{*}=(3.9224,8.9145,5.3346)\). The phase portrait around this point with \(c_1=2.6\) and \(c_2=1.8\) is given in Fig. 7 which exhibits a stable behavior around the equilibrium \(E^{*}\). Then, we change the value of \(c_2\). Let \(c_{2}=1.1\). Following the steps described in Sect. 2 and by direct computation, we have found the critical parameter value \(s=0.66352\), which indicates a Hopf bifurcation at this point (Figs. 8, 9, 10, 11 show the behavior of the system (2.1) for s below and above this critical parameter value. Note that all these figures are not plotted on the same scales). Therefore, a small change in the parameters can change the system from stabilizing around the interior equilibrium to oscillating around it indicating the existence of a supercritical Hopf bifurcation.
In the following, we consider the system with delay (3.1) and simulate this model around the boundary steady state \(E_2\) and interior equilibrium \(E^{*}\), respectively. Let the set of parametric values in (4.1) and \(c_{1}=2.6\), \(c_{2}=1.1\). According to Sect. 2, since \(c_{2}=1.1>c^{*}_{2}=0.68160\), the boundary equilibrium \(E_2\), which is without the “generalist” predator, is unstable (\(\lambda _{3}>0\)). For \(\tau >0\), by direct computation, we obtain \(\omega =0.71848\), \(\tau _{0}=0.4871\). By Theorems 2.2 and 3.3, we know that, if \(c_{2}>c^{*}_{2}=0.68160\) or \(c_{1}<c^{*}_{1}=1.6899\), the equilibrium \(E_2\) is unstable for all \(\tau \ge 0\). In addition, when \(\tau =\tau _{0}=0.4871\), Eq. (3.6) has a pair of purely imaginary roots \(\lambda =\pm i\omega \), where \(\omega =0.71848\). This is shown in Fig. 12.
Now, we consider the interior equilibrium \(E^{*}\). First, suppose that \(c_{1}=0.7\) and \(c_{2}=1.1\). By direct computation, and putting these parameter values in Eqs. (3.12) and (3.16), we conclude that Eq. (3.16) has no positive roots and the case (I) for this equilibrium point will occur. Next, we change the “specialist” and “generalist” predator rates (\(c_1\) and \(c_{2}\)). Let \(c_{1}=2.6\) and \(c_{2}=1.1\). By direct computation, we get \(\omega _{1}=0.30242\), \(\omega _{2}=0.55162\), \(\tau _{1,0}=2.4464\), and \(\tau _{2,0}=0.43832\). Therefore, the case (II) occurs for this equilibrium point. This is shown in Fig. 13.
5 Conclusion and Discussion
In this paper, a prey–predator model with Beddington–DeAngelis functional responses has been studied analytically and numerically. First, we have found the attracting region for this model which is ecologically meaningful. Then, the dynamics of the model are investigated. The sufficient conditions are given to ensure that the positive equilibrium is locally asymptotically stable. Theorems 2.2 and 2.9 provides more information about asymptotic stability of steady states. Next, we have considered the effect of time delay on the model, including the local stability and existence of Hopf bifurcation about the positive equilibrium point. The mathematical and theoretical analysis indicates that if the time delay is sufficiently small, the type of stability remain the same. However, by increasing the time delay, the equilibrium points \(E_2\) and \(E^{*}\) are both become unstable. While they were both stable in the ODE model. Finally, some numerical simulations are carried out for illustrating the analytic results. All numerical analysis show that the predation rates of the “specialist” and “generalist” predator or in other words \(c_1\) and \(c_2\) are the most important parameters to control the existence or extinction of the rodent population.
References
Abrams, A., Ginzburg, L.R.: The nature of predation: prey dependent, ratio dependent or neither? Trends Ecol. 15, 337–341 (2000)
Anderson, R.M., May, R.M.: The population dynamics of microparasites and their invertebrates hosts. Proc. R. Soc. Lond. 291, 451–463 (1981)
Arditi, R., Ginzburg, L.R.: Coupling in predator-prey dynamics: ratio-dependence. J. Theor. Biol. 139, 311–326 (1989)
Beddington, J.R.: Mutual interference between parasites or predators and its effect on searching efficiency. J. Anim. Ecol. 44(1), 331–340 (1975)
Beretta, E., Kuang, Y.: Global analysis in some delayed ratio dependent predator-prey systems. Nonlinear Anal. 32, 381–408 (1998)
Butler, G., Freedman, H.I., Waltman, P.: Uniformly persistent systems. Proc. Am. Math. Soc. 96(3), 425–430 (1986)
Cantrell, R.S., Cosner, C.: On the dynamics of predator-prey models with the Beddington–DeAngelis functional response. J. Math. Anal. Appl. 275, 206–222 (2001)
Chen, F.D.: On a nonlinear nonautonomous predator-prey model with diffusion and distributed delay. J. Comput. Appl. Math. 180(1), 33–49 (2005)
Cooke, K.L., Grossman, Z.: Discrete delay, distributed delay and stability switches. J. Math. Anal. Appl. 86, 592–627 (1982)
Cosner, C., Angelis, D.L., Ault, J.S., Olson, D.B.: Effects of spatial grouping on functional response of predators. Theor. Popul. Biol. 56, 65–75 (1999)
Crowley, P.H., Martin, E.K.: Functional responses and interference within and between year classes of a dragonfly population. J. N Am. Benthol. Soc. 8, 211–221 (1989)
Cui, J., Takeuchi, Y.: Permanence, extinction and periodic solution of predator-prey system with Beddington–DeAngelis functional response. J. Math. Anal. Appl. 317, 464–474 (2006)
DeAngelis, D.L., Goldstein, R.A., Neill, R.V.: A model for trophic interaction. J. Ecol. 56(4), 881–892 (1975)
Dorociakova, B., Olach, R.: Existence of positive solutions of delay differential equations. Tatra Mt. Math. Publ. 43, 63–70 (2009)
Freedman, H.I.: A model of predator-prey dynamics modified by the action of parasite. J. Math. Biosci. 99, 143–155 (1990)
Gard, T.C., Hallam, T.G.: Persistence in Food web-1, Lotka-Volterra food chains. Bull. Math. Biol. 41, 877–891 (1979)
Gakkhar, S., Naji, R.K.: Order and chaos in a food web consisting of a predator and two independent preys. Commun. Nonlinear Sci. Numer. Simul. 10(2), 105–120 (2005)
Gutierrez, A.P.: The physiological basis of ratio-dependent predator-prey theory: a metabolic pool model of Nicholsons blowflies as an example. Ecology 73, 1552–1563 (1992)
Hadeler, K.P., Freedman, H.I.: Predator-prey populations with parasitic infection. J. Math. Biol. 27, 609–631 (1989)
Hale, J.K., Kocak, H.: Dynamics and Bifurcations. Springer, New York (2001)
Hanski, I., Hansson, L., Henttonen, H.: Specialist predators, generalist predators, and the microtine rodent cycle. J. Anim. Ecol. 60(1), 353–367 (1991)
Hassell, M.P., Varley, G.C.: New inductive population model for insect parasites and its bearing on biological control. Nature 223, 1133–1137 (1969)
Hethcote, H.W., Wang, W., Ma, Z.: A predator-prey model with infected prey. Theor. Popul. Biol. 66, 259–268 (2004)
Holling, C.S.: The components of predation as revealed by a study of small mammal predation of the European pine sawfly. Can. Entomol. 91, 293–320 (1959)
Holling, C.S.: Some characteristics of simple types of predation and parasitism. Can. Entomol. 91, 385–395 (1959)
Huo, H.F., Li, W.T., Nieto, J.J.: Periodic solutions of delayed predator-prey model with the Beddington–DeAngelis functional response. Chaos Solit. Fract. 33, 505–512 (2007)
Huisman, C., DeBoer, R.J.: A formal derivation of the Beddington functional response. J. Theor. Biol. 185, 389–400 (1997)
Hwang, Z.W.: Global analysis of the predator-prey system with Beddington–DeAngelis functional response. J. Math. Anal. Appl. 281(1), 395–401 (2003)
Hwang, Z.W.: Uniqueness of limit cycles of the predator-prey system with Beddington–DeAngelis functional response. J. Math. Anal. Appl. 290(1), 113–122 (2004)
Kuang, Y., Beretta, E.: Global qualitative analysis of a ratio-dependent predator-prey system. J. Math. Biol. 36, 389–406 (1998)
Lv, S.J., Zhao, M.: The dynamic complexity of a three species food chain model. Chaos Solit. Fract. 37(5), 1469–1480 (2008)
Ma, W.B., Takeuchi, Y.: Stability analysis on predator-prey system with distributed delays. J. Comput. Appl. Math. 88, 79–94 (1998)
Mukhopadhyay, B., Bhattacharyya, R.: Vole population dynamics under the influence of specialist and generalist predation. Nat. Resour. Model. 26(1), 91–110 (2013)
Sarwardi, S., Mandal, M.R., Gazi, N.H.: Dynamical behaviour of an ecological system with Beddington–DeAngelis functional response. Model. Earth Syst. Environ. 106(2), 1–14 (2016)
Schaffer, W.M.: Order and chaos in ecological systems. Ecology 66(1), 93–106 (1985)
Skalski, G.T., Gilliam, J.F.: Functional responses with predator interference: viable alternatives to the Holling type II model. Ecology 82, 3083–3092 (2001)
Turchin, P.: Complex Population Dynamics: A Theoretical/ Empirical Synthesis. Princeton University Press, Princeton (2003)
Upadhyay, R.K., Rai, V.: Crisis-limited chaotic dynamics in ecological systems. Chaos Solit. Fract. 12(2), 205–218 (2001)
Venturino, E.: Epidemics in predator-prey models: disease in prey, in mathematical population dynamics. J. Math. Appl. Med. Biol. 381, 381–393 (1995)
Wang, K.: Permanence and global asymptotical stability of a predator prey model with mutual interference. Nonlinear Anal. Real World Appl. 12(2), 1062–1071 (2011)
Wang, F.Y., Hao, C.P., Chen, L.S.: Bifurcation and chaos in a Monod-Haldene type food chain chemostat with pulsed input and washout. Chaos Solit. Fract. 32(1), 181–194 (2007)
Xiao, Y., Chen, L.: Modeling and analysis of a predator-prey model with disease in prey. Math. Biosci. 171, 59–82 (2001)
Yodzis, P.: Predator-prey theory and management of multispecies fisheries. Ecol. Appl. 4, 51–58 (1994)
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Fatemeh Helen Ghane.
Rights and permissions
About this article

Cite this article
Fattahpour, H., Zangeneh, H.R.Z. & Nagata, W. Dynamics of Rodent Population With Two Predators. Bull. Iran. Math. Soc. 45, 965–996 (2019). https://doi.org/10.1007/s41980-018-0179-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41980-018-0179-6
Keywords
- Rodent population
- Specialist and generalist predator
- Delay differential equation
- Beddington–DeAngelis functional response
- Stability analysis
- Hopf bifurcation