
Abstract
In geotechnical planning methods, the undrained shear strength of clayey soil is very important as one of the engineering features. Over the past years, several theoretical and empirical methods have been developed to estimate the undrained shear strength based on soil properties using in-situ tests such as cone and piezocone penetration tests. However, most of these methods involve correlation assumptions that can result in inconsistent accuracy. In this study, multivariate adaptive regression splines (MARS) model with different degrees of interactions was developed for predicting the undrained shear strength of soil from cone penetration test data. To this aim, the model had five variables named cone tip resistance, sleeve friction, liquid limit, plastic limit, and overburden weight as inputs and undrained shear strength of soil as output. In all proposed models, the estimated USS values demonstrate acceptable agreement with experimental records, representing the workability of proposed equations for predicting the USS values with high accuracy. Comparison of three developed equations supplied that MARS-O4 has a better result than MARS-O3, followed by MARS-O2. Furthermore, by apprising the PI and OBJ indexes, the MARS-O4 model outperforms the other two models, with lower PI and OBJ values equal to 0.1464 and 169.14. Therefore, the 4th interaction equation of MARS for predicting the undrained shear strength of soil can be recognized as the proposed regression model.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The potency of soil to tolerate shear stress is referred to by the undrained shear strength (USS) of soil. It is one primary value in the computation of various geotechnical phenomena, such as settlement (Esmaeili-Falak et al. 2017, 2018). Moreover, to design foundations (deep and shallow foundations, both of them), the USS of soil is also of superior matter. Hence, circumspect appraisal of the shear strength is indispensable. Various analytical and experimental works can be performed on different types of soils to determine the properties of soils (Sarkhani Benemaran 2017; Poorjafar et al. 2021; Esmaeili-Falak 2017; Esmaeili-Falak et al. 2020). After the years, scholars had extended plenty of analytical and experiential procedures to specify the shear strength (Sarkhani Benemaran et al. 2020), for instance, bearing capacity (BCM), strain path (SPM), cavity expansion (CEM), and finite element (FEM) procedures (Huang et al. 2004). In addition, mixtures of mentioned procedures were examined as well to get an advanced commentary of shear strength, such as cavity expansion-finite element (Abu-Farsakh et al. 2003), cavity expansion-strain path (Yu and Whittle 1999), cavity expansion-bearing capacity (Salgado et al. 1997), and strain path-finite element (Teh and Houlsby 1991).
Nevertheless, many of these techniques synthesized streamlining presumptions about soil condition, margin circumstances, and failure benchmark (Esmaeili Falak et al. 2020). Hence, detecting theoretic procedures requires endorsement from in-situ and experimental soil parameters. In this regard, the unconsolidated undrained triaxial test can be very helpful. However, unfortunately, managing triaxial tests need more time as well as is costly. Furthermore, an unavoidable disorder in transport, handling, and collecting soil specimens means the test conclusions are controversial.
In-situ cone penetration tests can be effectually applied for soil recognition, appraisal of soil virtues, such as shear strength, and numbers of other geotechnical usages. In-situ CPT is trusty, quick, and economical compared to the old soil properties tests related to boring and experimental tests. The CPT test can supply persistent profile information with profundity relevant to soil stiffness and strength variables, which is good to estimate the USS of soil. Hence, some experimental procedures were extended in the last decades to approximate the USS from in-situ cone penetration test parameters (Lunne 1982; Senneset 1982). Nonetheless, many numbers of these techniques bring some presumptions and discernments in choosing suitable correlation coefficients factors like the cone tip factor, \({N}_{kt}\) among the CPT profiles information and USS that can impact the computation of shear strength. This can affect in incompatible precision of appraising the USS for various site situations.
In the recent decades, using artificial-based neural networks has enhanced and carried out with successful results in various civil (Masoumi et al. 2020) and geotechnical engineering problems, for example, shallow foundation settlement, liquefaction, the behavior of frozen soils, settlement behavior of pile foundations, swelling pressure of expansive soil and so forth (Sarkhani Benemaran et al. 2020; Das and Basudhar 2006; Ikizler et al. 2010; Neaupane and Achet 2004; Nejad and Jaksa 2017; Shahin et al. 2009; Esmaeili-Falak et al. 2019; Nassr et al. 2018). Regression is also one of the methods to determine the relationship between input and output variables such as MARS (Zhang et al. 2021; Sahraei et al. 2021; Raja and Shukla 2021).
Neural network application to estimate the USS of soil from the CPT test is anticipated to solve the deficiencies mentioned above in traditional techniques because there is no correlation hypothesis or judgment (Samui and Kurup 2012). To some extent, the neural network method tends to iterate the human brain learnings from a prior instance and is learned by specific mathematical methods. This aim can be gained from reiterative steps by regulating the weights, node numbers, and a number of layers. The difficulty of the neural network could be changed by altering the transfer function or the model form (Shahin et al. 2002). After identifying the most precise neural network model after training well, the developed algorithm could be explored for estimating the USS for other sites. An ANN is utilized to develop a model with more firm forecasting of USS from CPT records in a study (Abu-Farsakh and Mojumder 2020). First, a dataset was created of soil boring records and experimental tests from 70 sites located in Louisiana. Then, various neural network models were trained by cone tip resistance, sleeve friction, and other assessable soil characteristics. The conclusions were next compared with an experiential reference technique of specifying USS from CPT. The outputs specified that the neural network techniques outperformed the reference method, which approves this model's applicability in estimating the USS.
Another study applied data-driven extreme gradient boosting and random forest methods optimized with the Bayesian optimization method to find the relationships between the USS and soil parameters. To this aim, five variables containing the pre-consolidation stress, effective vertical stress, liquid limit, plastic limit, and natural water content are selected. It is shown that XGBoost- and RF-based models outperform others. Along with this, the XGBoost-based model provides properties significance ranks, which introduces it as an efficient tool for predicting geotechnical parameters and enhancing the model's interpretability (Zhang et al. 2021).
The prime objective of this paper is to find out the applicability of utilizing the multivariate adaptive regression splines (MARS) model for predicting the USS of soil from cone penetration test records to generate models which are to be used in practical applications. Moreover, various degrees of interactions of models are examined to have comprehensive, accurate, and reliable outputs. To gain this aim, the model had five input variables named cone tip resistance, sleeve friction, liquid limit, plastic limit, overburden weight, and USS of soil as output. To evaluate the accuracy of the proposed models, six statistical performance indices were considered.
2 Dataset and methodologies
2.1 Description of the dataset
To predict the undrained shear strength of soil from the cone penetration test, CPT data and corresponding bore log data were collected from 70 different sites in Louisiana (Fig. 1) (Mojumder 2020). Five different variables that can affect the value of the USS were considered as input variables. These variables included: cone tip resistance (CTR), sleeve friction (SF), liquid limit (LL), plastic limit (PL), and overburden weight (OBW). The statistics and histograms of the variables used for developing the model along with their normal distribution curves are given in Table 1 and Fig. 2, respectively.

Locations of cone penetration test (CPT) sites

Histograms of input (a–e) and output (f) variables and their normal distribution curves
2.2 Multivariate adaptive regression splines (MARS)
Multivariate asymmetric regression process is defined as multivariate adaptive regression spline (MARS) (Friedman 1991; Sekulic and Kowalski 1992; Friedman and Roosen 1995). Its most important duty is the amount's forecast of a continual affiliate variable, \(y(n\times 1)\), using a series of inputs that is independent, \(X(n\times p)\). The MARS could be presented as:
where ƒ is a sum of basis functions which is weighted that depend on \(x\), and \(e\) presented the error vector in \((n\times 1)\) dimension. The multivariate adaptive regression spline method is a generalization of classification and regression trees (Hastie et al. 2001) but prevailing the constraints of classification and regression tree (CART). This regression model does not request any preference assumption in the case of the fundamental operational connection between inputs and output variables. Apart from that, this connection is appointed from a totality of coefficients and piecewise multinomial of degree basis functions (\(q\)) fully related to the regression records \((x, y).\)
This regression method is created by coordinating the basis function to various spaces of the inputs. MARS uses bilateral shorten power operates as spline basis function (BF), shown in the below relations (Friedman and Roosen 1995):
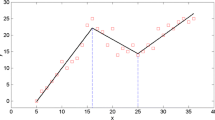
In these relations, the power to which the splines are picked up specifies the degree of the monotony of the resulting appraise all defined \(q\) (≥ 0). Notice that when \(q\) is equal to one, just simple lineal splines are appraised. For example, Fig. 3 shows a pair of splines for \(q\) equal to one at node 3.5. This figure shows a mirrored pair of hinge functions with a knot at for example 3.5.

A schematic exhibition of a spline BF. Dashed line (x < t, -(x-t)), solid line (x > t, + (x-t))
MARS of a dependent variable \(y\) with \(M\) basis function could be represented as Eq. 4 (Xu et al. 2004; Cheng and Cao 2014; Benemaran and Esmaeili-Falak 2020):
being ŷ the affiliate variable forecasted by the MARS, \({c}_{0}\), \({B}_{m}(x)\) and \({c}_{m}\) shows a constant, the mth basis function and the coefficient of mth basis function, respectively. Specifically, both parameters are demonstrated in the model, and the node situations for each variable have to be optimized. Moreover, this regression method utilizes generalized cross-validation (GCV) to describe the basic function contained in the model.
Indeed, the mean squared residual error apportioned by a penalty factor specifying the generalized cross-validation which pertains to the model intricacy, and it is described as Eq. 5 (Friedman 1991; Friedman and Roosen 1995):
So that an intricacy penalty that increases with a number of basis function in the model is shown as \(C(M)\) (Benemaran and Esmaeili-Falak 2020):
where \(M\) and \(d\) value the basis function in Eq. (4) and a penalty factor for all one of BF included in the model. In addition, the must utilize the GCV make clear before with the parameters N-subsets and the residual sum of squares to achieve correct results. The MARS model was performed with the ARESLab toolbox in MATLAB (Jekabsons 2011).
2.3 Performance evaluators
Different statistical evaluators were used to appraisal the performance of developed models for predicting the USS. Coefficient of determination (\({R}^{2}\)), root mean squared error (RMSE), mean absolute percentage error (MAPE), mean absolute error (MAE), performance index (PI), and OBJ were used as precision measurements (Eqs. 7–12):
where, \({y}_{P}\) represent the predicted values of the \({P}\)th pattern, \({t}_{P}\) depicts the target values of the \({P}\)th pattern, \(\overline{t }\) shows the averages of the target values, \(\overline{y }\) is the averages of the predicted values, and \(P\) is the number of dataset.
3 Result and discussion
The details of the basis functions and corresponding equations are shown in Table 2 for the degree of interactions of 2, 3, and 4 MARS equations. The explicable MARS approach different orders (from 2 to 4) formulations to estimate the USS results are created in Eqs. (13–15), respectively. Basis functions of 2, 3, and 4 order MARS models from 3 to 37 were assessed and measured. With an incremental number of basis functions, the performance indicators for data grew to the proper orientation. They gained the supreme outcomes when the number of basis functions was 17, 29, and 31 for MARS-O2, O3, and O4, respectively. By increasing the degree of interactions of equations from 2 to 4, the values of R2 raised from 0.8339 to 0.8619. on the other hand, RMSE shows a decline of about 34.8, and MAE values decreased from 296.85 to 270.84.
Order 2:
Order 3:
Order 4:
The result of developed models for predicting USS value is presented as follows. Figure 4 specifies acceptable potential in the modeling phase. Comparing the measured records from experimental efforts with those predicted by MARS-O2, O3, and O4 models are supplied in Fig. 4. It can be observed that the developed models have R2 larger than 0.834 and 0.9236. It means that the correlation between measured and predicted values from developed models is in good correlation so that it shows the highest accuracy in the regression process. Besides, to compare the productivity of the applied models, six statistical evaluators (R2, RMSE, MAE, MAPE, PI, and OBJ) were utilized. The results are shown in Table 3. MARS-O2 has the worst values regarding MARS models, which its R2 stood at 0.8339, and PI 0.1618. All indices are better by increasing the MARS interaction. For instance, RMSE declines from 393.79 to 358.99. By apprising the PI and OBJ indexes as the whole model evaluator, which considers other indexes altogether, the MARS-O4 model outperforms the other two models, with lower PI and OBJ values equal to 0.1464 and 338.27. Therefore, the 4th interaction equation of MARS for predicting USS of soil can be recognized as the proposed regression model.

The scatter plot of between observed and predicted USS
The performance assessment results of the implemented models are portrayed in Fig. 5, showing a graphical comparison between the distribution of errors. Also, an acceptable fit between measured and predicted USS values are obtainable from the time series plots presented in Fig. 5. As can be seen, in all proposed models, the estimated USS values demonstrate acceptable agreement with experimental records, representing the workability of proposed equations for predicting the USS values with high accuracy. Comparison of three developed equations supplied that MARS-O4 has a better result than MARS-O3, followed by MARS-O2. Based on error distribution figures, the MARS-O4 model results in the lowest error percentage in the USS predicting process, providing roughly accurate predictions than those of the rest developed methods specified.

USS prediction using MARS models with distribution
3.1 Sensitivity analysis
An evaluation of the sensitivity of the models was conducted to assess the most determinative input parameters to compute the USS. Various input data were built by removing a single input parameter simultaneously, and the test data set reported the amounts of three statistical performance criteria as \({R}^{2}\), RMSE, and MAE. The best model for the sensitivity analysis is chosen using the statistical performance criteria. In the present study, the MARS-O4 model is selected due to its remarkable performance. The results are as Table 4, which is shown that the cone tip resistance (CTR) is the most influential parameter for predicting the USS using the mentioned model, with a decline of about 0.1831 for \({R}^{2}\). From this perspective, although they are not as effective as CTR, the overburden weight (OBW) and sleeve friction (SF) parameters are in the following ranks, respectively. It is worth considering that eliminating input variables may only cause a minimal performance loss for the model, but in the present study, because the analysis was based on experimental measurements, eliminating variables could decline the model's generalizability. Considering the multicollinearity problem has not a significant impact on the fit of a model. It commonly does not impress remarkably on predictions, and the present study does not prefer deleting any variable.
4 Conclusion
In this study, Multivariate Adaptive Regression Splines (MARS) model with different degrees of interactions were proposed for predicting the undrained shear strength of soil from cone penetration test data. To this aim, the model had five variables named cone tip resistance, sleeve friction, liquid limit, plastic limit, and overburden weight. To evaluate the accuracy of the developed model, six performance indices were considered.
MARS-O2 has the worst values regarding MARS models, which its R2 stood at 0.8339, and PI 0.1618. All indices better by increasing the MARS interaction. The MARS-O4 model outperforms the other two models by apprising the PI and OBJ indexes, with lower PI and OBJ values equal to 0.1464 and 338.27. Therefore, the 4th interaction equation of MARS for predicting USS of soil can be recognized as the proposed regression model.
In all proposed models, the estimated USS values demonstrate acceptable agreement with experimental records, representing the workability of proposed equations for predicting the USS values with high accuracy. Comparison of three developed equations supplied that MARS-O4 has a better result than MARS-O3, followed by MARS-O2. Based on error distribution figures, the MARS-O4 model results in the lowest error percentage in the USS predicting process, providing roughly accurate predictions than those of the rest developed methods specified.
References
Abu-Farsakh MY, Mojumder MAH (2020) Exploring artificial neural network to evaluate the undrained shear strength of soil from cone penetration test data. Transp Res Rec 2674(4):11–22
Abu-Farsakh M, Tumay M, Voyiadjis G (2003) Numerical parametric study of piezocone penetration test in clays. Int J Geomech 3(2):170–181
Benemaran RS, Esmaeili-Falak M (2020) Optimization of cost and mechanical properties of concrete with admixtures using MARS and PSO. Comput Concr 26(4):309–316. https://doi.org/10.12989/cac.2020.26.4.309
Cheng M-Y, Cao M-T (2014) Accurately predicting building energy performance using evolutionary multivariate adaptive regression splines. Appl Soft Comput 22:178–188
Das SK, Basudhar PK (2006) Undrained lateral load capacity of piles in clay using artificial neural network. Comput Geotech 33(8):454–459
Esmaeili Falak M, Sarkhani Benemaran R, Seifi R (2020) Improvement of the mechanical and durability parameters of construction concrete of the qotursuyi spa. Concr Res 13(2):119–134. https://doi.org/10.22124/JCR.2020.14518.1395
Esmaeili-Falak M, Katebi H, Javadi A, Rahimi S (2017) Experimental investigation of stress and strain characteristics of frozen sandy soils—A case study of Tabriz subway. Modares Civ Eng J 17(5):13–23
Esmaeili-Falak M, Katebi H, Javadi A (2018) Experimental study of the mechanical behavior of frozen soils—A case study of tabriz subway. Period Polytech Civ Eng 62(1):117–125
Esmaeili-Falak M, Katebi H, Vadiati M, Adamowski J (2019) Predicting triaxial compressive strength and Young’s modulus of frozen sand using artificial intelligence methods. J Cold Regions Eng 33(3):4019007. https://doi.org/10.1061/(ASCE)CR.1943-5495.0000188
Esmaeili-Falak M, Katebi H, Javadi AA (2020) Effect of freezing on stress-strain characteristics of granular and cohesive soils. J Cold Regions Eng 34(2):05020001. https://doi.org/10.1061/(ASCE)CR.1943-5495.0000205
Esmaeili-Falak M (2017) Effect of system’s geometry on the stability of frozen wall in excavation of saturated granular soils. Doctoral dissertation, University of Tabriz
Friedman JH (1991) Multivariate adaptive regression splines. Ann Stat 2:1–67
Friedman JH, Roosen CB (1995) An introduction to multivariate adaptive regression splines. Sage Publications Sage CA, Thousand Oaks
Hastie T, Tibshirani R, Friedman JH (2003) The elements of statistical learning, corrected. In: Haxby JV, Gobbini MI, Furey ML, Ishai A, Schouten JL, Pietrini P (eds) Distributed and overlapping representations of faces and objects in ventral temporal cortex, vol 293. Springer, Berlin, p 24252430
Huang W, Sheng D, Sloan SW, Yu HS (2004) Finite element analysis of cone penetration in cohesionless soil. Comput Geotech 31(7):517–528
Ikizler SB, Aytekin M, Vekli M, Kocabaş F (2010) Prediction of swelling pressures of expansive soils using artificial neural networks. Adv Eng Softw 41(4):647–655
Jekabsons G (2016) ARESLab: adaptive regression splines toolbox for Matlab/Octave, 2011. http://www.cs.rtu.lv/jekabsons
Lunne T (1982) Role of CPT in North Sea foundation engineering
Masoumi F, Najjar-Ghabel S, Safarzadeh A, Sadaghat B (2020) Automatic calibration of the groundwater simulation model with high parameter dimensionality using sequential uncertainty fitting approach. Water Supply 20(8):3487–3501
Mojumder MAH (2020) Evaluation of undrained shear strength of soil, ultimate pile capacity and pile set-up parameter from cone penetration test (CPT) using artificial neural network (ANN)
Nassr A, Esmaeili-Falak M, Katebi H, Javadi A (2018) A new approach to modeling the behavior of frozen soils. Eng Geol 246:82–90. https://doi.org/10.1016/j.enggeo.2018.09.018
Neaupane KM, Achet SH (2004) Use of backpropagation neural network for landslide monitoring: a case study in the higher Himalaya. Eng Geol 74(3–4):213–226
Nejad FP, Jaksa MB (2017) Load-settlement behavior modeling of single piles using artificial neural networks and CPT data. Comput Geotech 89:9–21
Poorjafar A, Esmaeili-Falak M, Katebi H (2021) Pile-soil interaction determined by laterally loaded fixed head pile group. Geomech Eng 26(1):13–25. https://doi.org/10.12989/gae.2021.26.1.013
Raja MNA, Shukla SK (2021) Multivariate adaptive regression splines model for reinforced soil foundations. Geosynth Int 21:1–23
Sahraei MA, Duman H, Çodur MY, Eyduran E (2021) Prediction of transportation energy demand: multivariate adaptive regression splines. Energy 224:120090
Salgado R, Boulanger RW, Mitchell JK (1997) Lateral stress effects on CPT liquefaction resistance correlations. J Geotech Geoenviron Eng 123(8):726–735
Samui P, Kurup P (2012) Multivariate adaptive regression spline and least square support vector machine for prediction of undrained shear strength of clay. Int J Appl Metaheuristic Comput (IJAMC) 3(2):33–42
Sarkhani Benemaran R (2017) Experimental and analytical study of pile-stabilized layered slopes. Tabriz University, Tabriz
Sarkhani Benemaran R, Esmaeili-Falak M, Katebi H (2020) Physical and numerical modelling of pile-stabilized saturated layered slopes. Proc Inst Civ Eng Geotech Eng. https://doi.org/10.1680/jgeen.20.00152
Sekulic S, Kowalski BR (1992) MARS: a tutorial. J Chemom 6(4):199–216
Senneset K (1982) Strength and deformation parameters from cone penetration tests
Shahin MA, Maier HR, Jaksa MB (2002) Predicting settlement of shallow foundations using neural networks. J Geotech Geoenviron Eng 128(9):785–793
Shahin MA, Jaksa MB, Maier HR (2009) Recent advances and future challenges for artificial neural systems in geotechnical engineering applications. Adv Artif Neural Syst 2009:2
Teh CI, Houlsby GT (1991) An analytical study of the cone penetration test in clay. Geotechnique 41(1):17–34
Xu Q-S et al (2004) Multivariate adaptive regression splines—Studies of HIV reverse transcriptase inhibitors. Chemom Intell Lab Syst 72(1):27–34
Yu HS, Whittle AJ (1999) Combining strain path analysis and cavity expansion theory to estimate cone resistance in clay. Unpublished notes
Zhang W, Wu C, Li Y, Wang L, Samui P (2021) Assessment of pile drivability using random forest regression and multivariate adaptive regression splines. Georisk Assess Manag Risk Eng Syst Geohazards 15(1):27–40
Zhang W, Wu C, Zhong H, Li Y, Wang L (2021) Prediction of undrained shear strength using extreme gradient boosting and random forest based on Bayesian optimization. Geosci Front 12(1):469–477. https://doi.org/10.1016/j.gsf.2020.03.007
Acknowldgements
Science and Technology Planning Project of Nantong City, JiangSu Province (MS22020021), College Students Innovation and Entrepreneurship Training Program of JiangSu Province (202012703018Y), Scientific Research Project of JiangSu Shipping College (HYKY/2020B01).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Yu, D. Developing multivariate adaptive regression splines model for predicting the undrained shear strength of clayey soil from cone penetration test data. Multiscale and Multidiscip. Model. Exp. and Des. 5, 215–224 (2022). https://doi.org/10.1007/s41939-021-00113-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41939-021-00113-6