
Abstract
This paper concerns with a complex system that comprises two subsystems in series configuration. First subsystem has n identical units that are working under k-out-of-n: G policy. All the units are connected in parallel through a switching device, which may be unreliable as and when required. Second subsystem has four identical units that are working under 2-out-of-4: G policy. Failure rates of all the units in both the subsystems are assumed to be constant and follow exponential distribution, while the repair supports general distribution and Goumbel–Hougard copula family distribution. There may be an unpredictable catastrophic failure of the system at any time (t). Failed components are replaced by the available warm standbys and hence are restored as good as new components after repair. A novel efficient technique is used to investigate the system and evaluate availability and reliability of the system, mean time to failure and profit analysis using the supplementary variable technique, Laplace transforms and copula methodology. For such a system, the evaluation of the reliability characteristics is quite complex due to availability of n − k + 1 states for first subsystem as well as a finite series developed during solution unlike as done in the past. Numerical examples are illustrated with graphs for various values of n and k. It can provide a reference for the decision-makers when developing maintenance policies.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
There are many aspects accountable to consider availability and reliability in product design, particularly product complexity, addition of reliability-related sections in design provisions, attractiveness, cognizance of cost value and failures from past. If we try to increase the product difficulty level for parts alone, we see prodigious growth of some products. For example, in 1950, an airplane was made of 1800 critical parts and now in 2020 the number is enlarged to about 3700. We can see complex systems all around. Telecommunication networks, Gaganyaan (Man on the moon) project, manned orbital laboratories, space shuttles, communication satellites, a dishwasher, a hybrid car, a cargo ship, or a fighter plane, etc. are the well-known examples of complex systems. Determining availability and reliability of newly designed complex systems is a vital task for engineers as well as managers, since both availability and reliability are in sturdy association with other concepts like quality and safety. Moreover, these tasks may be tremendously tough because existing methods may be very complicated, unproductive, and sometimes unsuitable while dealing with real-life complex engineering systems. Regrettably, if we consider the system as extremely multifaceted, it is exceptionally difficult or sometimes even unmanageable to evaluate its reliability and availability. Every system assembled by human being is unpredictable in the perception that it demeans with age and practice, for example, every hardware suffers from degradation, not only due to passage of time, but also due to their rigorous usage. Furthermore, some failures are catastrophic in nature such that they can make serious economic losses, shake humans and inflict grave damage to the environment. To overcome these difficulties or to improve system reliability and availability, we generally add redundant components in system design. Most commonly used redundancy that we practice nowadays is k-out-of-n, which is a popular redundancy among researchers and widely accepted by many industries and organizations. The term k-out-of-n frequently used to show either good (G) system or a failed (F) system or both. We consider k-out-of-n: G system is good if and only if minimum k out of its n components are working successfully. It considered as failed if less than k out of its n components are working, i.e. if minimum n − k + 1 out of its n components are failed. We can find various uses of k-out-of-n warm standby system in numerous fields including medical prognosis, redundant-system testing, network design, power generation and transmission system and so on.
During the past few decades, extensive research has been carried out regarding the design of warm standby redundant system k-out-of-n. Several techniques and procedures had been developed. Various authors have studied k-out-of-n system model, in particular warm standby system by She and Pecht (1992), transient analysis with and without repair with two failure mode by Moustafa (1996), three failure mode by Kumar and Sirohi (2011), multi states by Huang et al. (2000) and Tian and Zuo (2009), repair with T-policy by Krishnamoorthy and Rekha (2001), two-stage weighted by Chen and Yang (2005), repairable consecutive with r repairman by Wu and Guan (2005), developed exact reliability formula by Liang et al. (2010), shut-off rule by means of quasi-birth–death process for non-homogenous components by Moghaddass et al. (2011), block replacement policy by Park and Pham (2012), helping unit by Kumar and Gupta (2007), waiting repair strategy by Ram et al. (2013), system equipped with a single warm standby by Eryilmaz (2013), load sharing system by Taghipour and Kassaei (2015), heterogeneous components with discrete lifetimes by Dembińska (2018) and many more. In all the above research articles, all the authors studied variety of failures and single type of repair. They forget to mention if we have more than one type of repair between two neighboring states that may be possible in several complex systems. If this is possible, then we evaluate the reliability characteristics using Goumbel–Hougard Copula repair distribution for a completely failed state. Copulas permits us to segregate the dependency structure in a distribution where two or more variable quantities involved. Additionally, we can construct any multivariate distribution by separately identifying the marginal distributions and the copula, i.e. Copulas are functions that amalgamate multivariate distribution functions to their static 1-D distribution functions. In addition, not all the above-mentioned authors paid attention to the systems that can have k-out-of-n system as a subsystem. Poonia and Sirohi (2020) considered a series configuration with three subsystems under k-out-of-n: G policy with three, two and one units, respectively. Authors have considered all failure rates constant and two repair policy viz. general repair and copula repair with deliberate failure of the system. Munjal and Singh (2014) studied a complex system that consists two subsystems with policy 2-out-of-3: G in parallel formation using supplementary variable technique, Laplace transforms and copula repair. Li et al. (2016) analyzed a non-repairable multi-state k-out-of-n system under dependent components using copula-based reliability modeling. Jia et al. (2016) performed reliability analysis for repairable multistate two-unit series systems when repair time can be neglected. Raghav et al. (2020) studied a series system that consists two subsystems of five and two units each. System will continue working until at least three units for first subsystem and one unit for second subsystem is in good working condition. Sensitivity and cost analysis has been done using copula repair. El-Damcese and Shama (2020) evaluated reliability characteristics of k-out-of-n system having two types of failure via different methodology. Singh et al. (2020a) have carried out the reliability measures of two subsystems type complex system viz. subsystem-1 and subsystem-2 in a series configuration with switching device. The subsystem-1 is in 2-out-of-5: G; policy, however the subsystem-2 has two identical units in parallel configuration working under 1-out-of-2: G; policy. Furthermore, the switching device in the system is unreliable. To repair the system, the authors used general repair and copula repair for partially failed and totally failed states. Recently, Singh et al. (2020b) have conceded out reliability and other parameters of three computer labs operational under 2-out-of-3: G policy connected through a server. In this, authors proved that copula repair is superior and more acceptable over general repair.
2 Model description and notations
2.1 System description
Satisfying societal needs for power, transmissions, transportation, etc. needs complex inter-connected networks and systems that continually and speedily evolve as technology changes and improves. Apart from this, clients need greater levels of availability and reliability, but at the same moment, the difficulty level of these systems is swelling. Bearing in mind this complex and developing atmosphere, the usage and exercisability of some old-fashioned reliability models and procedures are limited nowadays since they do not come up with outcome for availability, reliability, mean time to failure and cost as they offer steady-state availability and other parameters. The gracefulness of simulation modeling grows more apparently perceivable, widespread and beneficial as the system grows and becomes more complex. Therefore, to solve grave problems, a more truthful modeling methodology can be used. Though currently major research work mainly focused on transient analysis of reliability under the assumption that behaviors of the units of the system themselves, the study of a system when switch fails or system has catastrophic failure was less studied. Therefore, we have considered a complex system that has two subsystems in series configuration. First subsystem (subsystem-1) has n identical units working under k-out-of-n: G policy. All the units are connected in parallel through a switching device, which may be unreliable as and when required. Second subsystem (subsystem-2) has four identical units working under 2-out-of-4: G policy. Failure rates of all the units in both the subsystems are assumed to be constant and follow exponential distribution, while the repair supports two distributions, namely general distribution and Goumbel–Hougard copula family distribution. Failed components are replaced by the available warm standbys and hence are restored as good as new components after repair. As we are aware in today’s complex conditions, we are not sure about environmental condition, fabricated disturbances, or some other wild disruption that can harm the operation of system; therefore, we also consider catastrophic failure in this model. A catastrophic failure renders the system non-operable. We have studied the system using supplementary variable technique, Laplace transforms and copula methodology and discussed availability and reliability of the system, mean time to failure and profit analysis. The evaluation of the reliability characteristics of this model is quite complex due to availability of n − k + 1 states for first subsystem as well as a finite series developed during solution unlike as done in the past.
The paper is designed in several sections as follows: Sect. 2 describes the summary of system description together with assumptions and notations. Section 3 consists of state description including system configuration and transition diagram. In Sects. 4 and 5, we have developed differential equations with boundary conditions and then find the solution via Laplace transforms. The analytical results of the system performance like reliability, availability, MTTF and expected profit by considering different values of n and k are presented in Sect. 6. Concluding remarks on our findings with interpretations are offered in Sects. 7 and 8 with the help of graphs. All the explicit expressions and numerical evaluation for reliability physiognomies are acquired using MAPLE (software).
2.2 Assumptions
We consider the following assumptions through this paper:
-
1.
As the system starts, it is initially in state \(S_{0}\), and all the units in both the subsystems are in good working conditions including switching device.
-
2.
The subsystem-1 is in k-out-of-n: G; policy, however the subsystem-2 has four identical units in parallel configuration working under 2-out-of-4: G; policy. Furthermore, the subsystem-1 is controlled by a switching device.
-
3.
The units in both the subsystems are in warm standby mode that may start within a negligible time after the failure of any unit in the subsystems.
-
4.
One repairperson is full-time available to repair partially or completely failed units.
-
5.
A switching device is connected with subsystem-1, which may be defective as and when required.
-
6.
For any two adjacent transition states, there will be only one transition.
-
7.
As soon as repair of a unit in both the subsystems is completed, it again becomes operational. No malfunction reported due to maintenance of the machine.
-
8.
There may be an unpredictable catastrophic failure to the system at any time (t) and the system is assumed to be in complete failure mode.
-
9.
All failure rates are treated as constant that follows the exponential distribution.
-
10.
Partially failed states are repaired by employing general repair, while Gumbel–Hougaard copula can be activated to reinstate the system in case of a complete failure.
2.3 Notations
\(s,t\): Laplace transform and time scale variable.
\(\lambda_{1} /\lambda_{2}\): Failure rate of each unit in subsystem-1/subsystem-2.
\(\lambda_{{{\text{SW}}}} /\lambda_{{{\text{CF}}}}\): Failure rate of switching device in subsystem-1 / catastrophic failure.
\(\phi_{1} \left( x \right)/\phi_{2} \left( y \right)\): Repair rate of each unit in subsystem-1 / subsystem-2.
\(P_{0,0} \left( t \right)\):The state transition probability in \(S_{0,0}\) state at any instant t.
\(\overline{P}\left( s \right)\): Laplace transformation of the state transition probability \(P\left( t \right)\).
\(P_{i,j} \left( {x,t} \right)\): The probability that the system is in state \(S_{i,j}\) for \(i = 1,2\) and j represent the position of state and the system is under repair with elapsed repair time is \(x,t\).
\(E_{p} \left( t \right)\): Total estimated profit incurred in the interval \(\left[ {0,\left. t \right)} \right.\).
\(K_{1} ,K_{2}\): Revenue generated and service cost per unit time.
\(\mu_{0} \left( x \right)\): A term for joint probability from a complete failed state Si to good state S0 according to Gumbel–Hougard family copula is given as \(\mu_{0} \left( x \right) = C_{\theta } \left\{ {u_{1} \left( x \right),u_{2} \left( x \right)} \right\}\) \(= \exp \left[ {x^{\theta } + \left\{ {\log \phi \left( x \right)} \right\}^{\theta } } \right]^{{{\raise0.7ex\hbox{$1$} \!\mathord{\left/ {\vphantom {1 \theta }}\right.\kern-\nulldelimiterspace} \!\lower0.7ex\hbox{$\theta $}}}}\) where \(u_{1} \left( x \right) = \phi \left( x \right)\) and \(u_{2} \left( x \right) = e^{x}\). Here \(\theta\) is the parameter \(1 < \theta < \infty\).
3 State description including transition diagrams
In transition diagram, S0,0 is the perfect state, S1,1, S1,2, S1,3, …, S1,n−k, S2,1 and S2,2 are partial failed/degraded states while S1,n−k+1, SSW and SCF are completely failed states. If one or more but maximum upto k units failed in subsystem-1 or maximum two units failed in subsystem-2, the transitions approach partially failed states S1,1, S1,2, S1,3, …, S1,n−k, S2,1 and S2,2. The state S1,n−k+1 is complete failed state due to failure of more than k units in subsystem-1 or three units in subsystem-2. The states SSW and SCF are completely failed states due to failure of switching device or catastrophic failure, respectively. System configuration is shown in Fig. 1a while state transition diagram in Fig. 1b.

a System configuration. b State transition diagram of the mathematical model
4 Formulation of mathematical model
The following sets of first-order partial differential equations linked with the state transition diagram 1(b) using the probability of considerations and continuity arguments can be obtained as follows:
Boundary conditions:
Initial conditions
\(P_{0} \left( 0 \right) = 1\), and other state probabilities are zero at
5 Solution of the mathematical model
Let us take Laplace transformation of Eqs. (1) to (15) and using Eq. (16);we obtain
Boundary conditions:
Solving all the equations with the boundary conditions, one may get
where
Sum of Laplace transformations in which the system is in operational mode is assumed by \(\overline{P}_{up} \left( s \right)\), while sum of failed state by \(\overline{P}_{down} \left( s \right)\); therefore
6 Numerical computations
6.1 Availability analysis
If repair follows both general and Gumbel–Hougaard family copula distribution, then we use
Take the values of various parameters used in the model as \(\lambda_{1} = 0.030,\lambda_{2} = 0.035,\lambda_{\rm {CF}} = 0.020,\) \(\lambda_{\rm {SW}} = 0.021,\phi_{i} = 1\left( {i = 1,2} \right){\text{ and }}x = 1\) in (43). In this, we have considered both the cases like repair follow Gumbel–Hougaard family copula distribution and repair follows general distribution. After taking inverse Laplace transform, we get the availability of the system under copula for \(n = 4,k = 1\) as follows:
Similar expressions for availability of the system can be obtained for other values of n and k. By putting \(t = 0,5,10,15,20,25,30,35,40,45{\text{ and }}50\) units of time in (45), we may acquire different values of \(P_{{{\text{up}}}} (t)\) as presented in Tables 1 and 2 and corresponding from Figs. 2, 3, 4, 5, 6 and 7.

Availability under copula repair when n = 4

Availability under copula repair when n = 8

Availability under copula repair when n = 12

Availability under general repair when n = 4

Availability under general repair when n = 8

Availability under general repair when n = 12
6.2 Reliability of the system
Let us fix all repair rates to zero and obtain inverse Laplace transform in (43),\; we get the following expression for the reliability after taking the failure rates as \(\lambda_{1} = 0.030,\lambda_{2} = 0.035,\lambda_{\rm {CF}} = 0.020,\lambda_{\rm {SW}} = 0.021\). Now for n = 4, k = 2, we have
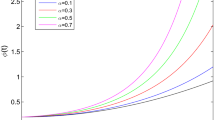
Similar expressions for reliability of the system can be obtained for other values of n and k. By putting \(t = 0,5,10,15,20,25,30,35,40,45{\text{ and }}50\) units of time in (46), we may acquire different values of \(R_{i} (t)\) as presented in Table 3 and corresponding Fig. 8.

Reliability as a function of time when n = 4, k = 2; n = 8, k = 6; n = 12, k = 10
6.3 Mean time to ailure (MTTF)
Taking all repair rates and Laplace parameter s equal to zero in (43) for the exponential distribution, we get mean time to failure as follows:
Now taking the values of different parameters as \(\lambda_{1} = 0.030,\lambda_{2} = 0.035,\lambda_{\rm {CF}} = 0.020,\lambda_{\rm {SW}} = 0.021\) and varying \(\lambda_{1} ,\lambda_{2} ,\lambda_{\rm {CF}} {\text{ and }}\lambda_{\rm {SW}}\) one by one from \(0.01{\text{ to }}0.10\) in (47), the variation of MTTF, with respect to failure rates can be obtained as given Table 4 and Fig. 9.

Variation in MTTF for\(\lambda ^{\prime}s\)
6.4 Cost analysis
Expected profit has been evaluated during the interval \(\left[ {0,\left. t \right)} \right.\) by assuming same failure and repair rates as per Sect. 5.1 for various values of n and k in both the cases. Let the service facility be available full time; then we have
where \(K_{1} {\text{ and }}K_{2}\) are the revenue generation and service cost in unit time. For same set of parameters defined in (45), the incurred profit as a function of time for \(n = 4,k = 2\) can be obtained as follows:
Similar expressions can be obtained for various values of n and k using maple software. Setting \(K_{1} = 1\) and \(K_{2} = 0.1,0.2{\text{ and }}0.3\) and putting \(t = 0,5,10,15,20,25,30,35,40,45{\text{ and }}50\) units of time, the results for expected profit is given as per Tables 5 and 6 and Figs. 10, 11, 12, 13, 14 and 15.

Expected profit under Copula repair when n = 4, k = 2

Expected profit under Copula repair when n = 8, k = 6

Expected profit under Copula repair when n = 12, k = 10

Expected profit under general repair when n = 4, k = 2

Expected profit under general repair when n = 8, k = 6

Expected profit under general repair when n = 12, k = 10
7 Discussion of results
The aim of this paper is to examine a multifaceted system that has two subsystems in series formation with switch over device to first subsystem only with catastrophic failure. Through this study we proved that copula repair is superior and hence preferred over general repair in case of repairable systems. Conclusion has highlighted the variation in availability and other characteristics under both types of repair for various n and k. Table 1 and Figs. 2, 3 and 4 present the availability of various values of n and k for different failure rate and copula repair in fully failed states. From Fig. 2, we can conclude that availability is more when n = 4 and k = 3. Similarlys Figs. 3 and 4 reveal that availability is more for n = 8, k = 6 and n = 12, k = 10, respectively. Table 2 and Figs. 5, 6 and 7 provide information on availability while repair follows the general distribution. From Tables 1 and 2, it is visible that availability is greater when repair follows Gumbel–Hougaard family copula distribution. Furthermore, availability changes with time for different failure rates \(\lambda_{1} = 0.030,\lambda_{2} = 0.035,\lambda_{\rm {CF}} = 0.020{\text{ and}}\)\(\lambda_{\rm {SW}} = 0.021\). It shrinks as t rises and ultimately becomes zero after a sufficiently long interval of time. Thus, availability of the system decreases as the value of time t increases in all possible values of n and k.
Table 3 and Fig. 8 yield the reliability of the system when n = 4, k = 2; n = 8, k = 6 and n = 12, k = 10, while repair is put to zero. It can be seen that reliability is higher for n = 12, k = 10 as compared to other cases. Therefore, we can without harm forecast future performance of the system for any t, n and k, as is clear by the graphs of the model. It is also clear from Tables 1, 2 and 3 that values of availability are bigger than the reliability, which points out the necessity of systematic repair for repairable systems for healthier show. Table 4 and Fig. 9 reveal MTTF of the system under variation in failure rates \(\lambda_{1} = 0.030,\lambda_{2} = 0.035,\) \(\lambda_{\rm {CF}} = 0.020{\text{ and }}\lambda_{\rm {SW}} = 0.021\), respectively, when other parameter is kept constant. We can observe MTTF of the system falls with the rise in the values of all the parameters. MTTF is found to be highest for \(\lambda_{2}\) and lowest for \(\lambda_{\rm {SW}}\). Therefore, MTTF of the system is decreasing with increase in failure rate from 0.01 to 0.10 when other parameters are not changing.
A critical examination of Tables 5 (under copula repair) and 7 (under general repair) and Figs. 10, 11, 12, 13, 14 and 15 reveals that in all three cases for n and k (n = 4, k = 2; n = 8, k = 6; n = 12, k = 10) expected profit increases as service cost K2 decreases, while revenue cost per unit time is fixed at K1 = 1. The calculated expected profit is maximum for K2 = 0.1, n = 4, k = 2 and n = 4 and minimum at K2 = 0.3, n = 12 and k = 10. One can observe that as service cost reduces, profit swells with variation of time. Additionally, copula repair is more effective repair strategy for better performance of repairable systems as profit is more in case of copula repair.
8 Conclusion
This paper analyzed a series system comprised of two subsystems, namely subsystem-1 and subsystem-2. Subsystem-1 has n identical units in parallel working under k-out-of-n: G policy governed through a switching device, which may be defective as and when required. Subsystem-2 has four identical units in parallel that are working under 2-out-of-4: G policy. The numerical assessment of each parameter have addressed for a series of values of failure and repair rates and it concludes that availability of the system steadily decreases and eventually becomes steady after a reasonable long time period for all values of n and k. It is good if the gap in the values of n and k is small, and falls rapidly as the difference enlarges. Variation in reliability follows the same suit. MTTF is decreasing continuously as failure rates varied from 0.01 to 0.10. It is maximum for subsystem-2 in the first half and for catastrophic failure in the second half and minimum for switching device which indicates that initially subsystem-2 and then catastrophic failure are more responsible for the proper functioning. Expected profit increases as time increases. Additionally, as service cost grows, profit reduces. In general, the evaluated expected profit is more for low service cost as compared to high service cost. From investigation, it is interesting to note that system failure can be minimized by considering higher values of n and k. In addition, availability and profit are higher when repair supports Goumbel–Hougard copula family distribution; therefore, it is advisable to scientific community to adopt multi dimension repair in the form of copula. This model has been developed by considering n − k + 1 states in subsystem-1 in such a way that it established a finite series during solution unlike as done in the past. This work may be extended by using other methodologies viz. Kolmogorov method, fuzzy reliability, s etc. method by considering constant repair rates.
References
Chen Y, Yang QY (2005) Reliability of two-stage weighted k-out-of-n systems with components in common. IEEE Trans Reliab 54(3):431–440
Dembińska A (2018) On reliability analysis of k-out-of-n systems consisting of heterogeneous components with discrete lifetimes. IEEE Trans Reliab 67(3):1071–1083
El-Damcese M, Shama MS (2020) Reliability analysis of a new k-out-of-n: G Model. World J Model Simul 16:3–17
Eryilmaz S (2013) Reliability of a k-out-of-n system equipped with a single warm standby component. IEEE Trans Reliab 62(2):499–503
Huang J, Zuo MJ, Wu Y (2000) Generalized multi-state k-out-of-n: G systems. IEEE Trans Reliab 49(1):105–111
Jia X, Shen J, Xing R (2016) Reliability analysis for repairable multistate two-unit series systems when repair time can be neglected. IEEE Trans Reliab 65(1):208–216
Krishnamoorthy A, Rekha A (2001) k-out-of-n system with repair: T-policy. Korean J Comput Appl Math 8(1):199–212
Kumar P, Gupta R (2007) Reliability analysis of a single unit M|G|1 system model with helping unit. J Comb Inf Syst Sci 32(1–4):209–219
Kumar P, Sirohi A (2011) Transient analysis of reliability with and without repair for k-out-of-n: G systems with three failure modes. Int J Math Comput Sci 2(1):151–162
Li X-Y, Liu Y, Chen CJ, Jiang T (2016) A copula-based reliability modeling for non-repairable multi-state k-out-of-n systems with dependent component. Proc Inst Mech Eng Part O J Risk Reliab 230:133
Liang X, Xiong Y, Li Z (2010) Exact reliability formula for consecutive k-out-of-n repairable systems. IEEE Trans Reliab 59(2):313–318
Moghaddass R, Zuo MJ, Wang W (2011) Availability of a general k-out-of-n: G system with non-identical components considering shut-off rules using quasi-birth-death process. Reliab Eng Syst Saf 96:489–496
Moustafa MS (1996) Transient analysis of reliability with and without repair for k-out-of-n: G systems with two failure modes. Reliab Eng Syst Saf 53:31–35
Munjal A, Singh SB (2014) Reliability analysis of a complex repairable system composed of a 2-out-of-3: G subsystem and a series subsystem connected in parallel. J Reliab Stat Stud 7(5):19–39
Park M, Pham H (2012) A generalized block replacement policy for a k-out-of-n system with respect to a threshold number of failed components and risk costs. IEEE Trans Syst Man Cybern A Syst Hum 42(2):453–463
Poonia PK, Sirohi A (2020) Cost benefit analysis of a k-out-of-n: G type warm standby series system under catastrophic failure using copula linguistics. Int J Reliab Risk Saf Theory Appl 3(1):35–44
Raghav D, Poonia PK, Gahlot M, Singh VV, Ayagi HI, Adbullahi AH (2020) Probabilistic analysis of a system consisting of two subsystems in the series configuration under copula repair approach. J Korean Soc Math Educ Ser B Pure Appl Math 27(3):137–155
Ram M, Singh SB, Singh VV (2013) Stochastic analysis of a standby complex system with waiting repair strategy. IEEE Trans Syst Man Cybern Part A Syst Hum 43(3):698–707
She J, Pecht MG (1992) Reliability of a k-out-of-n warm-standby system. IEEE Trans Reliab 41:72–75
Singh VV, Poonia PK, Adbullahi AH (2020a) Performance analysis of a complex repairable system with two subsystems in series configuration with an imperfect switch. J Math Comput Sci 10(2):359–383
Singh VV, Poonia PK, Rawal DK (2020b) Reliability analysis of repairable network system of three computer labs connected with a server under 2- out- of- 3 G configuration. Life Cycle Reliab Saf Eng. https://doi.org/10.1007/s41872-020-00129-w
Taghipour S, Kassaei ML (2015) Periodic inspection optimization of a k-out-of-n load-sharing system. IEEE Trans Reliab 64(3):1116–1127
Tian Z, Zuo MJ (2009) The multi-state k-out-of-n systems and their performance evaluation. IIE Trans 41:32–44
Wu YQ, Guan JC (2005) Repairable consecutive- k-out-of-n: G systems with r repairman. IEEE Trans Reliab 54(2):328–337
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Poonia, P.K., Sirohi, A. & Kumar, A. Cost analysis of a repairable warm standby k-out-of-n: G and 2-out-of-4: G systems in series configuration under catastrophic failure using copula repair. Life Cycle Reliab Saf Eng 10, 121–133 (2021). https://doi.org/10.1007/s41872-020-00155-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41872-020-00155-8