
Abstract
In this paper, we propose a new repair model for a cold standby system, which consists of two components and one repairman. It is assumed that the consecutive working time follows decreasing geometric process after repair, and the repair time interval is a constant for component 1. For component 2 (standby component), the failure process during working time follows Generalized Polya Process, which is a generalized version of the nonhomogeneous Poisson process. Component 2 is rectified by Generalized Polya Process repair when it fails. The repair time of component 2 is assumed to be negligible. Component 1 is assumed to have priority in use. The long-run average cost rate function of the system is deduced based on the failure number of component 1. Moreover, the optimal replacement policy of model is established by minimizing the long-run average cost rate function theoretically, which proves the existence and uniqueness of the optimal replacement policy. Numerical examples are provided to verify the effectiveness of the proposed approaches. Sensitivity analysis are conducted to illustrate the influence of parameters under the optimal replacement policy.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Geometric process (GP) repair model is first introduced into the reliability areas and maintenance problems by Lam (1988a, b). It is a model that has been widely used in optimisation of maintenance policies. The GP was first discussed by Smith and Leadbetter (1963). In Lam’s model, two univariate replacement policies are discussed. One is based on the working age T of a system and another is based on the failure number N of the system. Stadje and Zuckerman (1990) generalized Lam’s work and introduced a general monotone process repair model. Finkelstein (1993) studied a general repair model based on a scale transformation. Zhang (1994) applied the GP in maintenance policy optimisation, in which Zhang generalized Lam’s work, proposed the bivariate replacement policy (T, N) and proved that the bivariate optimal policy \((T,N)^*\) is better than univariate optimal policy \(N^*\) and \(T^*\). In bivariate policy case, the system is replaced at the working age T or at the Nth failure of the system which occurs first. Lam (1988b), Stadje and Zuckerman (1990) proved that optimal replacement policy \(N^*\) is better than the optimal policy \(T^*\) under some conditions. The different variants of the GP model is still researched. Braun et al. (2005) studied the \(\alpha \) series process. Chan et al. (2006) proposed threshold GP. Wu and Wang (2017) studied the Semi-GP. Wu (2018) studied the doubly GP. Furthermore, Zhang and Wang (2009) proposed a new repair model based on the reliability and failure number of a system. Zhao and Nakagawa (2012) proposed age and periodic replacement last models with working cycles, and comparisons between such a replacement last and the conventional replacement first are made in detail. Zhao et al. (2015) proposed several approximate models in maintenance theory. Sheu et al. (2016) studied an operating system subject to shock occurring as a non-homogeneous pure birth process. Zhang and Wang (2016) proposed the extended GP repairable model. Lim et al. (2016) studied an age replacement model based on imperfect repair with random probability. Berrade et al. (2017) proposed a new postponed delay time model. Ito et al. (2017) studied the reliability and preventive replacement problems for a K-out-of-n system, where K is a stochastic parameter provided. Zhao et al. (2017a) summarized some perspectives and method in age replacement models. Levitin et al. (2018) studied heterogeneous 1-out-of-N warm standby systems when all components can experience internal failures whereas operating components are exposed to the external shocks as well. The expression for the instantaneous availability is derived and the original numerical algorithm for its evaluation is suggested. In recent years, many extensions works have been studied. More generalized studies can be obtained from Tsai et al. (2017), Zhao et al. (2017b), Cha and Finkelstein (2018), Chen et al. (2019), Levitin and Finkelstein (2019) and so on.
Cold standby systems are widely used in some engineering fields. Using standby component can improve the reliability performance of the system and reduce the cost. In a nuclear plant, to reduce the risk of the ‘scram’ of a reactor in case of a coolant pipe breaking or some other failure happening, a standby diesel generator should be installed. In a hospital or a steel manufacturing complex, if the power supply suddenly suspends when required, the consequences might be catastrophic, such as a patient may die in an operating room. In this case, a storage generator is usually equipped to provide electric power. Then the electric power and the storage generator form a cold standby power system. Usually, it is reasonable to assume that the storage generator is the standby component of the cold standby system. In the operating theater of a hospital, an operation have to be discontinued as soon as the power source is cut (i.e. power station failures). Usually, there is a standby power station (i.e. a storage battery) in the operating theater. Therefore, the power station (component 1) and the storage battery (component 2) form a cold standby repairable system. Obviously, it is reasonable to assume that the storage battery is as good as new after repair, since its used time is shorter than the power station, and the repair time of the storage battery is also short, while the repair time of power stations is long, due to the complexity of the power stations equipment. Besides the electric power system in a hospital, some similar examples can be found from Lam (2007), Zhang and Wang (2007), Wang and Zhang (2011). Zhang and Wang (2007) studied a cold standby repairable system. It is assumed that component 1 has priority in use when two components are all good. Wang and Zhang (2011) studied the optimal replacement policy for a cold standby system with preventive repair. Wang and Zhang (2016) studied a cold standby system and assumed that the failure process of standby component is nonhomogeneous Poisson process (NHPP).
Many researchers considered the failure system with the minimal repair, in which the failure intensity function of the system does not change. Barlow and Hunter (1960) concluded that the minimal repair does not have effect on the failure rate function of the system. Brown and Proschan (1983) studied the imperfect repair model, in which the system is replaced with probability p and minimal repair with probability \(1-p\). Later, Nakagawa (1986) studied the minimal repair in preventive maintenance model. Many other works on minimal repair have been developed, such as Jaturonnateeaba (2006), Avenab (2008), Sheu and Li (2012). Although minimal repair has numerous advantages in model development and maintenance optimization, it has practical limitations. In minimal repair system, NHPP is a usually used to describe the failure event process of the repairable system. However, NHPP has the property of an independent increment, i.e., the imminent failure process does not dependent on the failure history. In fact, it can be too restrictive to describe most of the real life problems. For example, in engineering maintenance problem, many systems are deteriorating gradually with the increasing of failure number. A system’s susceptibility to shocks (failure) increases with the failure number experienced previously. Thus a minor failure or even a negligible failure that had occurred during the initial lifetime period can become harmful and even catastrophic with time. Namely most failure process of repairable systems are depending on the failure history and accumulative wear. NHPP is not a natural assumption for repairable models. More detailed research on the property of independent increment can be found in the Cha and Finkelstein (2009, 2011). However, in the paper of Wang and Zhang (2016), the failure number of component 2 follows NHPP.
Inspired by the above consideration, the main objective is to study the optimal replacement policy of cold standby system. Assuming that the failure process of component 2 follows the Generalized Polya Process (GPP) in each periodic working time, which is the generalized NHPP. The working time of component 1 follows GP and component 2 adopts GPP repair. A GPP repair restores the system to its operating status just prior to failure, and the failure intensity function after repair is the same as that just before failure. We derive the long-run average cost rate (ACR) function of the system based on the failure number of component 1 and investigate the optimal replacement policy both theoretically and numerically. The main contributions of this paper are twofold. On one hand, a more general and reasonable GGP maintenance model for a two components cold standby system is studied; on the other hand, the existence and uniqueness of the optimal replacement policy is proved.
The rest of the paper is organized as follows. In Sect. 2, definitions of GP and GPP are introduced, and a new repair model for cold standby system with two components is proposed. In Sect. 3, we derive the long-run ACR function of the system and analyze the optimal replacement policy \(N^*\) theoretically. Simulation studies are concluded to verify the effectiveness of the theoretical analysis in Sect. 4. Section 5 gives conclusions of this work.
2 Definitions and model assumptions
2.1 Definitions
For convenient purpose, we give the definitions of the GP and GPP as follows.
Definition 1
Assume that \(\left\{ X_n,n=1,2,\ldots \right\} \) is a sequence independent non-negative random variables. If the cumulative distribution function (CDF) of \(X_n\) is \(F_{n}(t) = F(a^{n-1}t)\), for \(n=1,2,\ldots \), and a is a positive constant, then \(\left\{ X_n,n=1,2,\ldots \right\} \) is called a GP (Lam 1988a), and a is the ratio of the GP.
Obviously, if \(a>1\), \(\left\{ X_n,n=1,2,\ldots \right\} \) is stochastically decreasing; if \(0<a<1\), \(\left\{ X_n,n=1,2,\ldots \right\} \) is stochastically increasing; if \(a=1\), \(\left\{ X_n, n=1, 2, \ldots \right\} \) is a renewal process.
Let \(\left\{ N(t), t\ge 0 \right\} \) be the point process, \(N({t-})=\left\{ N(u), 0\le u< t \right\} \) be the history of the point process, and \(T_i\) be the time from 0 until the arrival of the ith event in [0, t). Then the point process is described by stochastic intensity \(\lambda (t)\), which is described as Lee and Cha (2016).
where \(N(t_1, t_2)\) denotes the number of events in time interval \([t_1, t_2)\), \(t_1<t_2\).
Definition 2
Generalized Polya Process (GPP) (Cha 2014)
A counting process \(\left\{ N(t), t\ge 0 \right\} \) is called the GPP with the set of parameters \((\lambda (t), \alpha , \beta )\), \(\alpha \ge 0\), \(\beta >0\), if
-
(i)
\(N(0)=0\);
-
(ii)
\(\lambda _t= \left( \alpha N(t-) +\beta \right) \lambda (t)\).
When \(\alpha =0\), \(\beta =1\), then \(\lambda _t=\lambda (t)\), the GPP is NHPP, which has intensity function \(\lambda (t)\).
Some property of GPP is given as follows. The proof is provided in Cha (2014).
Proposition 1
Suppose that a counting process \(\left\{ N(t), t\ge 0 \right\} \) is the GPP with the set of parameters \((\lambda (t), \alpha , \beta )\), \(\alpha \ge 0\), \(\beta >0\). Then the distribution of N(t) is
and
where \(\varLambda (t)=\int _0^t \lambda (s) {{\,\mathrm{d\!}\,}}s\).
Based on the definition of GPP, GPP repair is given as follows.
Definition 3
GPP repair (Lee and Cha 2016)
For an item with failure rate \(\lambda (t)\), a repair type is called the ‘GPP repair’ with parameter \(\alpha \) if \(\left\{ N(t), t\ge 0 \right\} \) is the GPP with parameter set \((\lambda (t),\alpha ,1)\). The GPP repair was defined via three parameters \((\lambda (t),\alpha , \beta )\). Under the GPP repair process, the corresponding stochastic intensity is specified as
Remark 1
:
-
(i)
\(\alpha \) determines the degree of repair, which means bigger \(\alpha \) accelerates the deterioration, and smaller \(\alpha \) decelerates it. Furthermore, as \(\alpha \) increases, the corresponding repair becomes worse and worse.
According to the Definition 3, the GPP repair has one parameter \(\alpha \). Now we interpret the effect of the parameter \(\alpha \) from the modeling point of view. For this, the failure intensity function \(\phi (t)\) is defined as follows:
which represents the mean number of failures per unit time at time t. According to Proposition 1 and Definition 3, \(\phi (t)\) can be written as
When \(\lambda (t)=0.02t^2+0.2\), \(\phi (t)\) was plotted for different \(\alpha \) in Fig. 1. According to Fig. 1, it is easy to see that the parameter \(\alpha \) determines the degree of the deterioration. And bigger \(\alpha \) accelerates the deterioration of the system, whereas smaller \(\alpha \) decelerates it.

The failure intensity function \(\phi (t)\) for different \(\alpha \)
2.2 Model assumptions
Now, a new repair model for a two components cold standby system based on two types of repairs is proposed. Some assumptions are given as follows.
Assumption 1
Component 1 is in a working state, and component 2 is in cold standby state at the same time.
Assumption 2
The successive working time interval of component 1 after repair forms a decreasing GP, which is denoted by \(\{ X_n, n=1,2,\ldots \}\). The CDF of \(X_n\) is denoted by
where \(t>0\), \(a>1\) is the ratio of the GP. The repair time interval of component 1 is denoted by T, and \(E(X_1)=\lambda \).
Assumption 3
When component 2 fails, GPP repair is carried out. The failure process during repair time interval T follows the GPP with parameters set \(\left( \lambda \left( \left( i - 1 \right) T + t \right) , \alpha , 1 \right) , i=1,2, \ldots \), where \(\lambda \left( (i-1) T \right) \) denotes the failure intensity function after the ith repair of component 2. Similar to minimal repair. The durations of the GPP repair is negligible.
Assumption 4
The replacement policy N based on the failure number of component 1. Namely, the system is replaced at the Nth failure of component 1.
Assumption 5
The replacement time of the system is negligible.
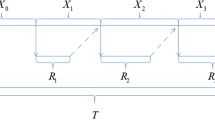
The time interval between completion of the \((i-1)\)th repair and completion of the ith repair of component 1 is called the ith cycle. A working process of the cold standby system is illustrated in Fig. 2. Component 1 has two states, which is working or down. Component 2 is in working status when component 1 is being repaired. Component 2 would be repaired right away if it fails and its repair time is minimal and ignorable. After repair, component 2 will be ready to work instantaneously.

A possible working process of a cold standby system
3 Optimal replacement policy \(N^*\)
Let \(C_1\) be the repair cost of component 1. \(C_2\) be the GPP repair cost of component 2 and \(C_0\) be the replacement cost of the system. Let \(\tau _n, n=1, 2, \ldots \) be the time between the \((n-1)\)th replacement and the nth replacement of the system, where \(\tau _1\) is the first replacement time of the system. Obviously, \(\{\tau _n, n=1, 2, \ldots \}\) is a renewal process. Let C(N) be the long-run ACR function of the system under the policy of N. According to the renewal reward theorem (Ross 1996), we have
where the R(t) denotes the profit within interval [0, t].
Let L and S denote the total working time and total repair time of the system in a renewal cycle respectively. According to the assumptions 1-5, \( L=X_1 + X_2 + \cdots + X_N + (N-1)T\), \(S=(N-1)T\). The length of the renewal cycle is L. Using \(N_{GP}\) denotes the total GPP repair number of component 2 in the renewal cycle. According to the Eq. (3) of Proposition 1 in part 2, the expected failure number of GPP repair in the ith working period of component 2 is given by
By applying the renewal reward theorem Ross (1996), the long-run ACR function C(N) is expressed as follows:
where \(\lambda _i= E(X_i)= \frac{\lambda }{b^{i-1}}\).
Remark 2
:
-
(i)
When the failure number of component 2 follows NHPP with intensity function \(\lambda (t)\) in the time interval [0, t]. Then, the long-run ACR function is
$$\begin{aligned} C(N)=\frac{ C_1(N-1)T + C_2 (N-1) \int _0^{T} \lambda (t) {{\,\mathrm{d\!}\,}}t + C_0}{\sum \nolimits _{i=1}^N \lambda _i + (N-1) T}. \end{aligned}$$ -
(ii)
If the failure number of component 2 forms a homogeneous Poisson process with intensity r. The failure number of component 2 in a renewal cycle is \((N-1)Tr\). Then, the long-run ACR function becomes
$$\begin{aligned} C(N)=\frac{ C_1(N-1)T + C_2 (N-1)Tr + C_0}{\sum \nolimits _{i=1}^N \lambda _i + (N-1)T}. \end{aligned}$$ -
(iii)
If \(N=1\), the long-run ACR function of the system is
$$\begin{aligned} C(1)=\frac{ \frac{C_2}{\alpha} \left( \exp \left\{ \alpha \int _0^{T} \lambda (t) {{\,\mathrm{d\!}\,}}t \right\} - 1 \right) + C_0}{\lambda _1}, \end{aligned}$$this case is studied by Lee and Cha (2016).
Now, the optimal replacement policy \(N^*\) of the system by minimizing the long-run ACR function is discussed theoretically. The optimal \(N^*\) is analyzed under some conditions in Theorem 1.
Firstly, we compute the difference between \(C(N+1)\) and C(N) as follows
where
and
The denominator of Eq. (5) is positive. So the sign of \(C(N+1)-C(N)\) is depend on the sign of numerator \(\varPsi (N)\) in Eq. (5). It is easy to get \(C(N+1)-C(N)>0\) if and only if \(\varPsi (N)>0\).
Next, the property of the function \(\varPsi (N)\) is given as follows.
Lemma 1
: If the failure rate function \(\lambda (t)\) is increasing with t, then function \(\varPsi (N)\) is increasing with N.
The proof will be divided into two parts.
Proof
(i) First we show \(\varPsi _1(N)\) is increasing with N. This can be easily see by the following:
(ii) The difference of the \(\varPsi _2(N+1)-\varPsi _2(N)\) is
where
By differentiating f(N) with respect to T, we have
since \(\lambda (t)\) is increasing with t, then
Meanwhile \(\lambda '(t)>0\), which implies
Therefore \(f'(N)>0\), i.e., the function of f(N) is increasing with N. \(f(N)>0\) because \(\exp \left\{ \alpha \int _0^{T} \lambda ((i-1)T + t) {{\,\mathrm{d\!}\,}}t \right\} -1 >0, i=1,2, \ldots N\).
Thus, \(\varPsi _2(N+1)-\varPsi _2(N)>0\). i.e., the \(\varPsi _2 (N)\) is increasing with N for any fixed \(T>0\). According to the above (i) and (ii), the function \(\varPsi (N)\) is increasing with N. \(\square \)
Lemma 2
: Assume the failure rate function \(\lambda (t)\) is strictly increasing, then \(\varPsi (\infty )=\lim \limits _{N \rightarrow +\infty } \varPsi (N)=\infty \).
Proof
(i) Since \(\lim \limits _{N \rightarrow +\infty } \lambda _{N}=0\), \(\lim \limits _{N \rightarrow +\infty } (N-1) \lambda _{N+1}=\frac{N-1}{b^N}\lambda =0\),
\(\lim \limits _{N \rightarrow +\infty } \sum \limits _{i=1}^N \lambda _i=\frac{b \lambda }{b-1}\),
hence
(ii) \(\varPsi _2(N)\) can be also expressed as
where
and
Since \(\lambda (t)\) is increasing up to \(\infty \), we have
hence
and
according to the Eqs. (11)–(19)
\(\square \)
When \(N=1\), \(\varPsi (1)= C_1 T \lambda - C_0 \left( \frac{\lambda }{b} + T \right) + C_2 \frac{\lambda }{\alpha} \left( \exp \left\{ \alpha \int _0^{T} \lambda (t) {{\,\mathrm{d\!}\,}}t \right\} -1 \right) \) and \(\varPsi (1)>0\) \(\Longleftrightarrow \) \(C(2)>C(1)\), namely the long-run ACR function is minimized by \(N=1\), therefore the optimal policy is \(N^*=1\).
According to the above Lemmas 1 and 2, we obtain the following Theorem 1.
Theorem 1
Assume that r(t) is increasing. The following results hold.
-
(i)
If \(C_1 T \lambda + C_2 \frac{\lambda }{\alpha} \left( \exp \left\{ \alpha \int _0^{T} \lambda (t) {{\,\mathrm{d\!}\,}}t \right\} -1 \right) > C_0 \left( \frac{\lambda }{b}+ T \right) \), the optimal \(N^*=1\).
-
(ii)
If r(t) is increasing, and \(r(\infty )=\infty \), \(\varPsi (\infty )=\infty \), then there exists an unique optimal policy \(N^*\) such that
$$\begin{aligned} N^* = min \left\{ \; N \;| \; \varPsi (N) \ge 0 \right\} . \end{aligned}$$(21)
4 Numerical examples
In this section, numerical examples for illustrating the effectiveness of our model and optimal replacement policy are provided.
-
(1)
Let the failure rate function of the component 2 as \(\lambda (t)=0.01t^2\) with parameter \(b=1.15\), \(\lambda =50\), \(T=3\). The condition of Theorem 1 is thus satisfied. The optimal replacement policy \(N^*\) and \(C(N^*)\) for different values of \(C_0\), \(C_1\) and \(\alpha\) are shown in Table 1 when \(C_2=5\), \(T=3\). For example, when \(C_1=50\), \(C_2=5\), \(C_0=4000\), \(\alpha =0.5\), the optimal replacement policy \(N^*=6\). It is easy to see that the optimal replacement policy \(N^*\) is decreasing with the increasing of \(\alpha\), however the optimal \(C(N^*)\) is increasing with \(\alpha \) increasing.
-
(2)
Let \(b=1.15\), \(\lambda =50\), \(C_1=50\), \(C_2=5\), \(C_0=2000\), \(\alpha =0.3\), \(T=3\). The experimental results show that the optimal replacement policy \(N^*=7\) and the corresponding \(C(7)=12.19\). The curve of C(N) is plotted in Fig. 3 and the curve of \(\varPsi (N)\) is plotted in Fig. 4. According to Fig. 4, the optimal \(N^*\) is the minimal N satisfying \(\varPsi (N)>0\).
-
(3)
Assume that \(\lambda =50\), \(C_1=50\), \(C_2=5\), \(C_0=2000\), \(\alpha =0.3\), \(T=3\). The long-run ACR function C(N) for different values of b is shown in Fig. 5. We can see that the long-run ACR function becomes bigger when b increases.
-
(4)
Furthermore, assume that \(\lambda =50\), \(C_1=50\), \(C_2=5\), \(C_0=2000\), \(b=1.2\), \(T=3\), the long-run ACR function C(N) for different values of \(\alpha \) is plotted in Fig. 6. The long-run ACR function becomes bigger and bigger when \(\alpha \) increases. The trend of growth is obvious especially when \(\alpha =0.9\).

The long-run ACR function C(N)

The function \(\varPsi (N)\) against N

The long-run ACR function C(N) for different values of b

The long-run ACR function C(N) for different values of \(\alpha \)
5 Conclusions and future work
In this paper, a repair model for a cold standby system based on two types of failure repairs is proposed. Therefore, it is general model and will have a great potential in application. The long-run ACR function of the system is derived. Moreover, the existence and uniqueness of the optimal replacement policy is proved. Numerical examples were conducted to illustrate the theoretical results. From our experience, we can believe that an optimal replacement policy will exist. Sensitivity analysis were performed to study the effect of parameters on the optimal replacement policy.
In the future, we will consider the time needed for repair and replacement in the system and study the optimal maintenance policies for repair systems with one working state and multiple failure state models. This is more realistic and challenging.
References
Avenab T (2008) A minimal repair replacement model with two types of failure and a safety constraint. Eur J Oper Res 188(2):506–515
Barlow R, Hunter L (1960) Optimum preventive maintenance policies. Oper Res 8(1):90–100
Braun WJ, Li W, Zhao YQ (2005) Properties of the geometric and related processes. Naval Res Logist (NRL) 52(7):607–616
Brown M, Proschan F (1983) Imperfect repair. J Appl Probab 20(4):851–859
Berrade M, Scarf PA, Cavalcante CAV (2017) A study of postponed replacement in a delay time model. Reliab Eng Syst Saf 168:70–79
Cha JH (2014) Characterization of the generalized polya process and its applications. Adv Appl Probab 46(4):1148–1171
Cha JH, Finkelstein M (2009) On a terminating shock process with independent wear increments. J Appl Probab 46(2):353–362
Cha JH, Finkelstein M (2011) On new classes of extreme shock models and some generalizations. J Appl Probab 48(1):258–270
Cha JH, Finkelstein M (2018) On information-based residual lifetime in survival models with delayed failures. Stat Probab Lett 137:209–216
Chan JS, Yu PL, Lam Y, Ho AP (2006) Modelling SARS data using threshold geometric process. Stat Med 25(11):1826–1839
Chen M, Zhao XF, Nakagawa T (2019) Replacement policies with general models. Ann Oper Res 277(1):47–61
Finkelstein MS (1993) A scale model of general repair. Microelectron Reliab 33(1):41–44
Ito K, Zhao XF, Nakagawa T (2017) Random number of units for k-out-of-n systems. Appl Math Model 45:563–572
Jaturonnateeaba J (2006) Optimal preventive maintenance of leased equipment with corrective minimal repairs. Eur J Oper Res 174(1):201–215
Lam Y (1988a) Geometric processes and replacement problem. Acta Math Appl Sin 4:366–377
Lam Y (1988b) A note on the optimal replacement problem. Adv Appl Probab 20(2):479–482
Lam Y (2007) The geometric process and its applications. World Scientific, Singapore
Lee H, Cha JH (2016) New stochastic models for preventive maintenance and maintenance optimization. Eur J Oper Res 255(1):80–90
Levitin G, Finkelstein M (2019) Optimal loading of elements in series systems exposed to external shocks. Reliab Eng Syst Saf. https://doi.org/10.1016/j.ress.2017.08.009
Levitin G, Finkelstein M, Dai Y (2018) Optimizing availability of heterogeneous standby systems exposed to shocks. Reliab Eng Syst Saf 170:137–145
Lim JH, Qu J, Zuo MJ, Soares CG (2016) Age replacement policy based on imperfect repair with random probability. Reliab Eng Syst Saf 149:24–33
Nakagawa T (1986) Periodic and sequential preventive maintenance policies. J Appl Probab 23(2):536–542
Ross SM (1996) Stochastic processes, 2nd edn. Wiley, New York
Sheu SH, Li SH (2012) A generalised maintenance policy with age-dependent minimal repair cost for a system subject to shocks under periodic overhaul. Int J Syst Sci 43(6):1007–1013
Sheu SH, Chen YL, Chang CC, Zhang ZG (2016) A note on a two variable block replacement policy for a system subject to non-homogeneous pure birth shocks. Appl Math Model 40:3703–3712
Smith WL, Leadbetter MR (1963) On the renewal function for the Weibull distribution. Technometrics 5(3):393–396
Stadje W, Zuckerman D (1990) Optimal strategies for some repair replacement models. Adv Appl Probab 22(3):641–656
Tsai HN, Sheu SH, Zhang ZG (2017) A trivariate optimal replacement policy for a deteriorating system based on cumulative damage and inspections. Reliab Eng Syst Saf 160:74–88
Wang GJ, Zhang YL (2011) A bivariate optimal replacement policy for a cold standby repairable system with preventive repair. Appl Math Comput 218(7):3158–3165
Wang GJ, Zhang YL (2016) Optimal replacement policy for a two-dissimilar-component cold standby system with different repair actions. Int J Syst Sci 47(5):1021–1031
Wu S (2018) Doubly geometric processes and applications. J Oper Res Soc 69(1):66–77
Wu S, Wang G (2017) The semi-geometric process and some properties. IMA J Manag Math 29(2):229–245
Zhang YL (1994) A bivariate optimal replacement policy for a repairable system. J Appl Probab 31(4):1123–1127
Zhang YL, Wang GJ (2007) A deteriorating cold standby repairable system with priority in use. Eur J Oper Res 183(1):278–295
Zhang YL, Wang GJ (2009) A geometric process repair model for a repairable cold standby system with priority in use and repair. Reliab Eng Syst Saf 94(11):1782–1787
Zhang YL, Wang GJ (2016) An extended geometric process repair model for a cold standby repairable system with imperfect delayed repair. Int J Syst Sci Oper Logist 3(3):163–175
Zhao XF, Nakagawa T (2012) Optimization problems of replacement first or last in reliability theory. Eur J Oper Res 223:141–149
Zhao XF, Al-Khalifa KN, Nakagawa T (2015) Approximate methods for optimal replacement, maintenance, and inspection policies. Reliab Eng Syst Saf 144:68–73
Zhao XF, Al-Khalifa KN, Hamouda AM, Nakagawa T (2017a) Age replacement models: a summary with new perspectives and methods. Reliab Eng Syst Saf 161:95–105
Zhao XF, Qian CH, Nakagawa T (2017b) Comparisons of replacement policies with periodic times and repair numbers. Reliab Eng Syst Saf 168:161–170
Acknowledgements
This work was supported by National Natural Science Foundation of China under Grant number [61573014] and the Fundamental Research Funds for the Central Universities of China under Grant number [JB180702]. The authors would like to thank the editor and the anonymous referees for the valuable suggestions that improved the quality of this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was supported by National Natural Science Foundation of China [Grant number 61573014] and the Fundamental Research Funds for the Central Universities of China [Grant Number JB180702].
Rights and permissions
About this article

Cite this article
Wang, J., Ye, J. A new repair model and its optimization for cold standby system. Oper Res Int J 22, 105–122 (2022). https://doi.org/10.1007/s12351-020-00545-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12351-020-00545-x