
Abstract
It is known that the variable coefficients Hirota equations have been widely studied in the amplification or absorption of propagating pulses, as well as in the generation of supercontinuum in inhomogeneous optical fibers. In this paper, a generalized variable coefficients Hirota equation is considered. Firstly, we constructed the classical and generalized Darboux transformations of the equation. Next, we obtained multisoliton solutions based on the classical Darboux transformation and rogue wave solutions using the generalized Darboux transformation. Finally, we discussed the evolutions of solitons.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
In recent years, people pay more and more attention to the study of nonlinear evolution equations, such as Schrödinger equation, Korteweg–de Vries equation, sine-Gorden equation, see e.g. [1,2,3,4]. Seeking exact solutions of the equations is helpful to understand the essential properties, algebraic structure and physical phenomena [5,6,7]. There are many methods to obtain the exact solutions, for instance, Painlevé analysis [8, 9], inverse scattering transformation [10, 11], Hirota bilinear method [12, 13], Bäcklund transform [14], Darboux transformation (DT) [15,16,17], Lie symmetry analysis [18, 19], Riemann–Hilbert formulation [20], elliptic wave function method [21,22,23], Lie group analysis [24,25,26], etc.
DT is an effective method to obtain a new solution from the initial solution, and it can be repeated any number of times. The main idea of DT approach is to prove the canonical equivalence of the Lax pairs and to obtain soliton solutions through continuous iteration. To construct the explicit solutions, Gu and his collaborators constructed a classical DT in matrix form and provided purely algebraic algorithms for a group of isospectral integrable systems [15, 27]. To obtain the rogue waves of nonlinear Schrödinger equation, Guo et al. [28] derived a generalized DT through a limit procedure. These methods have also been extended to study the variable coefficients and nonlocal equations.
For the problem at hand, we focus on studying a generalized variable coefficients Hirota equation
where \(i = \sqrt{ - 1}\) and u is a complex function with the variables (t, x), \(\alpha = \alpha (t),\beta = \beta (t),\delta = \delta (t)\) are real functions with variable t and the parameter \(\gamma \) is a nonzero constant. The significance of the study for this equation is that it is often associated with the amplification or absorption of propagating pulses and the generation of supercontinuum in inhomogeneous optical fibers [29,30,31]. In optical fibers, \(\alpha , \beta , \gamma ,\delta \) represent the group dispersion velocity, third order dispersion, self-steepening and the amplification or absorption coefficient respectively [32]. For different value of \(\alpha ,\beta ,\gamma ,\delta \), the amplitude, intensity, width and period of the oscillation show different results. We constructed the classical and generalized DTs of Eq. (1) and obtained the multisolutions and rogue wave solutions. The evolutions of solutions are discussed. The propagation of solitons can be controlled by adjusting the values of relevant parameters. The results might be of potential applications in the design of optical communication systems. Some related works associated with (1) have been researched. The auto-Bäcklund transformation and a family of the analytic solutions has also been given, see [33]. When \(\alpha , \beta , \delta \) are all constants, multisolitons, breathers and rogue waves have been derived, see [34,35,36,37]. When \(\alpha = \delta = 0,\beta = \beta (t),\gamma = \gamma (t)\), the multisoliton solutions have been obtained, see [38,39,40,41]. When \(\beta = 0,\alpha = \alpha (t),\delta = \delta (t),\gamma = \gamma (t)\), multisoliton solutions, rogue wave solutions, semi-rational solutions, breathers are obtained, please see [42,43,44,45,46] for details.
The paper is organized as follows. In section “Lax Pair and Darboux Transformation”, we derive the Lax pair, classical DT and generalized DT of Eq. (1). In section “Multisoliton Solutions”, we use the classical DT to obtain multisoliton solutions from the zero seed solution. In section “Rogue Wave Solutions”, we use the generalized DT to obtain the rogue wave solutions from the non-zero seed solution. Finally, the main results are summeried.
Lax Pair and Darboux Transformation
In this section, we will derive the Lax pair and DTs of Eq. (1) which include classical DT and generalized DT. The Lax pair of soliton equation means that the equation can be written as a pair of linear problems. The DTs build the relationships between the seed solution u[0] and the new solution u[N].
Lax Pair
Theorem 1
The Lax pair for the generalized variable coefficients Hirota equation (1) can be expressed as follows
where U, V are the matrices determined by u and \({u^*}\) with isospectral parameter \(\lambda \) (* denotes the complex conjugate),
with
Proof
According to the compatibility condition, i.e. \({\varphi _{xt}} = {\varphi _{tx}}\), of Eq. (2), we can obtain zero-curvature equation \({U_t} - {V_x} + \left[ {U,V} \right] = 0\) (here \(\left[ {U,V} \right] = UV - VU\)), namely
Substituting Eqs. (4) and (1) into Eq. (5), we can verify the validity of \({U_t} - {V_x} + \left[ {U,V} \right] = 0\). Therefore, we can give the Lax pair for Eq. (1). \(\square \)
Darboux Transformation
Taking \(j= 1,2,3 \ldots \), we assume u[j] is j soliton solution of Eq. (1), \(\varphi [j]\) be j solution of the Lax pair (2) at u[j] and T[j] is a gauge transformation between \(\varphi [j - 1]\) and \(\varphi [j]\) which represents the transformation relationship between two sets of solutions of Lax pair. The iteration process of the DT is described using a flowchart
Theorem 2
The N-fold classical DT of the generalized variable coefficient Hirota equation (1) is
Here the gauge transformation \(T[j] = \lambda I - S[j - 1]\), \(S[j - 1] = \frac{1}{{{{\left| {{f_j}[j - 1]} \right| }^2} + {{\left| {{g_j}[j - 1]} \right| }^2}}}\left( {\begin{array}{*{20}{c}} {{\lambda _j}{{\left| {{f_j}[j - 1]} \right| }^2} + \lambda _j^*{{\left| {{g_j}[j - 1]} \right| }^2}}&{}{({\lambda _j} - \lambda _j^*){f_j}[j - 1]{g_j}{{[j - 1]}^*}}\\ {({\lambda _j} - \lambda _j^*){f_j}{{[j -1 ]}^*}{g_j}[j - 1]}&{}{\lambda _j^*{{\left| {{f_j}[j - 1]} \right| }^2} + {\lambda _j}{{\left| {{g_j}[j - 1]} \right| }^2}} \end{array}} \right) \). \({\varphi _j}[j - 1]={({f_j}[j-1],{g_j}[j-1])^T}\) is a solution of Lax pair (2) at \(\lambda =\lambda _j\) and \(u={u[j-1]}\) which satisfies \(\left( {\begin{array}{*{20}{l}} {{f_j}[j - 1]}\\ {{g_j}[j - 1]} \end{array}} \right) = ({\lambda _j}I - S[j - 2])({\lambda _j}I - S[j - 3]) \cdots ({\lambda _j}I - S[0])\left( {\begin{array}{*{20}{l}} {{f_j}[0]}\\ {{g_j}[0]} \end{array}} \right) .\)
Proof
-
(1)
Gauge transformation
Assuming \(\varphi \) satisfies the Lax pair Eq. (2) and \(\varphi '\) satisfies the Lax pair
here \({U'},{V'}\) have the same forms with U, V except that \(u,{u^*}\) in the matrices U, V are replaced with \({u'},{u'}^*\) in the matrices \({U'},{V'}\). If we set
and call T a gauge transformation. We can obtain the gauge transformation T satisfies
Substituting \(T = \lambda I - S\) into Eqs. (10) and (11), we have
Setting \({(f,g)^T}\) is a solution of the Lax pair (2) at \(\lambda = {\lambda _0}\), we see that \({( - g^*,f^*)^T}\) is a solution of Lax pair (2) when \(\lambda = {{\lambda _0} ^*}\). Denoting \(\Lambda = \left( {\begin{array}{*{20}{c}} {{\lambda _0}}&{}0\\ 0&{}{\lambda _0^*} \end{array}} \right) ,H[0] = \left( {\begin{array}{*{20}{c}} {{f}}&{}{ - g^*}\\ {{g}}&{}{f^*} \end{array}} \right) \), it can be verified that
satisfies Eqs. (12) and (13). Then we find the gauge transformation of the Lax pair (2),
Denoting \(S = \left( {\begin{array}{*{20}{c}} {{s_{11}}}&{}\quad {{s_{12}}}\\ {{s_{21}}}&{}\quad {{s_{22}}} \end{array}} \right) \), and comparing the coefficients of \(\lambda \) in (12), the following relationship between two sets of solutions in Eq. (1) will be derived,
Based on Eq. (14), we can see
Substituting Eq. (17) into Eq. (16), we obtain
-
(2)
One-fold classical DT
Assuming \({({f_1[0]},{g_1[0]})^T}\) is a solution of Lax pair (2) when \(\lambda = {\lambda _1}\) and \(u=u[0]\). We can use Eqs. (14) and (15) to obtain the gauge transformation
According to Eqs. (15) and (18), we can obtain the one-fold classical DT
-
(3)
Two-fold classical DT
Assuming \({({f_2[k]},{g_2[k]})^T}\) is a solution of Lax pair (2) when \(\lambda = {\lambda _2}\) and \(u=u[k]\), where \(k=0,1\). By means of Eqs. (14) and (15), the gauge transformation
Applying Eq. (20), we get
and
By Eq. (18), we derive
Substituting Eq. (20) into Eq. (24), we obtain the two-fold classical DT
-
(4)
Three-fold classical DT
Assuming \({({f_3[k]},{g_3[k]})^T}\) is a solution of Lax pair (2) when \(\lambda = {\lambda _3}\) and \(u=u[k]\), where \(k=0,1,2\). From Eqs. (14) and (15), the gauge transformation
Utilizing Eq. (25), we get
and
By using Eq. (18), we observe
Substituting Eq. (25) into Eq. (29), we obtain the three-fold classical DT
-
(5)
N-fold classical DT
Assuming \({({f_N[k]},{g_N[k]})^T}\) is a solution of Lax pair (2) when \(\lambda = {\lambda _N}\) and \(u=u[k]\), where \(k = 0,1, \ldots ,N-1\). Continuing the above iteration process, we obtain
The relationship between \({({f_N[0]},{g_N[0]})^T}\) and \({({f_N}[N-1],{g_N}[N-1])^T}\) is
We obtain the N-fold classical DT
\(\square \)
Theorem 3
The N-fold generalized DT of the generalized variable coefficients Hirota equation (1) is
Here the gauge transformation \({T_1}[j]=\lambda I - {S_1}[j - 1]\), \({S_1}[j - 1] = \frac{1}{{{{\left| {{f_1}[j - 1]} \right| }^2} + {{\left| {{g_1}[j - 1]} \right| }^2}}}\left( {\begin{array}{*{20}{c}} {{\lambda _1}{{\left| {{f_1}[j - 1]} \right| }^2} + \lambda _1^*{{\left| {{g_1}[j - 1]} \right| }^2}}&{}{({\lambda _1} - \lambda _1^*){f_1}[j - 1]{g_1}{{[j - 1]}^*}}\\ {({\lambda _1} - \lambda _1^*){f_1}{{[j - 1]}^*}{g_1}[j - 1]}&{}{\lambda _1^*{{\left| {{f_1}[j - 1]} \right| }^2} + {\lambda _1}{{\left| {{g_1}[j - 1]} \right| }^2}} \end{array}} \right) \). \({\varphi _1}[j - 1]={({f_1}[j-1],{g_1}[j-1])^T}\) is a solution of Lax pair (2) at \(\lambda ={\lambda _1}\) and \(u={u[j-1]}\) which satisfies
where \({\varphi _1}({\lambda _1} + \varepsilon )\) is a solution of Lax pair (2) at \(\lambda = {\lambda _1} + \varepsilon , u = u[0]\) and \(\varphi _1^{[k]} = {({f_1}^{[k]},{g_1}^{[k]})^T} = {\left. {\frac{1}{{k!}}\frac{{{\partial ^k}{\varphi _1}(\lambda )}}{{\partial {\lambda ^k}}}} \right| _{\lambda = {\lambda _1}}}\).
Proof
From Eqs. (14) and (15), we see that if \(\lambda =\lambda _0\), the gauge transformation
It means that the same solution can not be reused in the iteration of DT. In the generalized DT, we consider the case of \(\lambda = {\lambda _1} + \varepsilon \), where \(\varepsilon \) is a small complex parameter. Assuming \({\varphi _1}({\lambda _1} + \varepsilon )\) is a solution of Lax pair (2) at \(\lambda = {\lambda _1} + \varepsilon \) and \(u = u[0]\), and it can be expanded at \(\varepsilon = 0\) as the following Taylor series
where \(\varphi _1^{[k]} = {({f_1}^{[k]},{g_1}^{[k]})^T} = {\left. {\frac{1}{{k!}}\frac{{{\partial ^k}{\varphi _1}(\lambda )}}{{\partial {\lambda ^k}}}} \right| _{\lambda = {\lambda _1}}}(k = 0,1,2, \ldots )\), and \(\varphi _1^{[0]} = {\varphi _1}({\lambda _1}) = {\varphi _1}[0]\).
-
(1)
One-fold generalized DT
The one-fold generalized DT of Eq. (1) is the same as the one-fold classical DT. The gauge transformation
and the one-fold generalized DT
-
(2)
Two-fold generalized DT
From the classical DT (7), we see that \({\left. {{T_1}[1]} \right| _{\lambda = {\lambda _1} + \varepsilon }}{\varphi _1}({\lambda _1} + \varepsilon )\) is a solution of Lax pair (2) at \(\lambda = {\lambda _1} + \varepsilon \) and \(u = u[1]\), and so is \(\frac{{{{\left. {{T_1}[1]} \right| }_{\lambda = {\lambda _1} + \varepsilon }}{\varphi _1}({\lambda _1} + \varepsilon )}}{\varepsilon }\). Then \(\mathop {\lim }\limits _{\varepsilon \rightarrow 0} \frac{{{{\left. {{T_1}[1]} \right| }_{\lambda = {\lambda _1} + \varepsilon }}{\varphi _1}({\lambda _1} + \varepsilon )}}{\varepsilon }\) is a solution of Lax pair (2) at \(\lambda = {\lambda _1}\) and \(u = u[1]\). We write \({\varphi _1}[1] = {({f_1}[1],{g_1}[1])^T} = \mathop {\lim }\limits _{\varepsilon \rightarrow 0} \frac{{{{\left. {{T_1}[1]} \right| }_{\lambda = {\lambda _1} + \varepsilon }}{\varphi _1}({\lambda _1} + \varepsilon )}}{\varepsilon }\), and can calculate that
where \({\left. {{T_1}[1]} \right| _{\lambda = {\lambda _1}}}{\varphi _1}[0]= 0\). By means of Eqs. (14) and (15), we get the gauge transformation
Combining with Eqs. (16) and (39), we find the two-fold generalized DT
-
(3)
Three-fold generalized DT
Similarly, we see that \({\left. {({T_1}[2]{T_1}[1])} \right| _{\lambda = {\lambda _1} + \varepsilon }}{\varphi _1}({\lambda _1} + \varepsilon )\) is a solution of Lax pair (2) at \(\lambda = {\lambda _1} + \varepsilon \) and \(u = u[2]\), and so is \(\frac{{{{\left. {({T_1}[2]{T_1}[1])} \right| }_{\lambda = {\lambda _1} + \varepsilon }}{\varphi _1}({\lambda _1} + \varepsilon )}}{{{\varepsilon ^2}}}\). Then \(\mathop {\lim }\limits _{\varepsilon \rightarrow 0} \frac{{{{\left. {({T_1}[2]{T_1}[1])} \right| }_{\lambda = {\lambda _1} + \varepsilon }}{\varphi _1}({\lambda _1} + \varepsilon )}}{{{\varepsilon ^2}}}\) is a solution of Lax pair (2) at \(\lambda = {\lambda _1}\) and \(u = u[2]\). We write \({\varphi _1}[2] = {({f_1}[2],{g_1}[2])^T} = \mathop {\lim }\limits _{\varepsilon \rightarrow 0} \frac{{{{\left. {({T_1}[2]{T_1}[1])} \right| }_{\lambda = {\lambda _1} + \varepsilon }}{\varphi _1}({\lambda _1} + \varepsilon )}}{{{\varepsilon ^2}}}\), and can calculate that
where \({\left. {{T_1}[1]} \right| _{\lambda = {\lambda _1}}}{\varphi _1}[0] = 0\) and \({\left. {{T_1}[2]} \right| _{\lambda = {\lambda _1}}}({\varphi _1}[0] + {\left. {{T_1}[1]} \right| _{\lambda = {\lambda _1}}}\varphi _1^{[1]}) = {\left. {{T_1}[2]} \right| _{\lambda = {\lambda _1}}}{\varphi _1}[1] = 0\). Then we have the gauge transformation
and the three-fold generalized DT
-
(4)
N-fold generalized DT
Continuing the above process, we see that \(\mathop {\lim }\limits _{\varepsilon \rightarrow 0} \frac{{{{\left. {({T_1}[N - 1] \cdots {T_1}[2]{T_1}[1])} \right| }_{\lambda = {\lambda _1} + \varepsilon }}{\varphi _1}({\lambda _1} + \varepsilon )}}{{{\varepsilon ^{N - 1}}}}\) is a solution of Lax pair (2) at \(\lambda = {\lambda _1} + \varepsilon \) and \(u = u[N-1]\). We write \({\varphi _1}[N - 1] = {({f_1}[N - 1],{g_1}[N - 1])^T} = \mathop {\lim }\limits _{\varepsilon \rightarrow 0} \frac{{{{\left. {({T_1}[N - 1] \cdots {T_1}[2]{T_1}[1])} \right| }_{\lambda = {\lambda _1} + \varepsilon }}{\varphi _1}({\lambda _1} + \varepsilon )}}{{{\varepsilon ^{N - 1}}}}\) and can calculate that
Then the gauge transformation
and the N-fold generalized DT
have been established. \(\square \)
Multisoliton Solutions
In order to obtain the multisoliton solutions for Eq. (1), we start from the seed solution \(u[0] = 0\). Substituting \(u[0] = 0\) into Lax pair (2), we get
Through direct calculation, the solution \({\varphi _1}[0] = {({f_1[0]},{g_1[0]})^T}\) of Lax pair (49) at \(\lambda ={\lambda _1}\) is
From Eq. (20), if we take \({\lambda _1} = 1 + 2i\), we find the one-soliton solution
The solution \({\varphi _2}[0] = {({f_2[0]},{g_2[0]})^T}\) of Lax pair (49) at \(\lambda ={\lambda _2}\) is
Substituting Eqs. (22) and (52) into (25) and taking \({\lambda _2} = 2 + 3i\), we get the two-soliton solution
Next, we will discuss the evolutions of the soliton solutions and show the relationship between solitons and the group dispersion velocity \(\alpha \), third order dispersion \(\beta \) and the amplification or absorption coefficient \(\delta \).
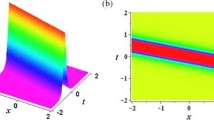
In Figs. 1, 2, 3, 4, 5, 6 and 7, (a) and (b) represent three- and two- dimensional plots of one-soliton solution depicted by Eq. (51), respectively. (c) and (d) represent three- and two- dimensional plots of two-soliton solution depicted by Eq. (53), respectively.







In Fig. 1, the soliton structure oscillates periodically because third order dispersion coefficient \(\beta \) is a trigonometric function. In Fig. 2, the image of the soliton solution has an upper convex shape and converges at \(x = 0\) because third order dispersion coefficient \(\beta \) is an exponential function. In Fig. 3, the soliton with variable propagation velocities illustrates the non-travelling-wave characteristics because third order dispersion coefficient \(\beta \) is of parabolic-type. In Figs. 1c, 2c and 3c, the head-on interactions form a peak at each interaction region between the two solitons, respectively. In Figs. 4, 5 and 6, we can see that the image of the soliton solutions are related to the characteristics of the group dispersion velocity coefficient \(\alpha \). In Fig. 7, the soliton image is affected by several nonzero parameters including the group dispersion velocity coefficient \(\alpha \), third order dispersion coefficient\(\beta \), self-steepening coefficient\(\gamma \), and amplification or absorption coefficient \(\delta \).
Rogue Wave Solutions
In this section, we will derive the rogue wave solutions for Eq. (1). we start with the seed solution \(u[0] = {e^{i\int {(\alpha (t)\gamma + \delta (t))dt} }}\). By combining it with Eqs. (39) and (42), we can describe one-rogue wave solution and two-rogue wave solution as follows
here we take \({\lambda _1} = - i \).
Next, we will use an example to demonstrate the process. When we take \( \alpha =t, \beta = 0.5, \gamma = 2,\delta =3\), we can obtain \(u[0] = {e^{i({t^2} + 3t)}}\). Assuming \({\varphi _1}(-i + \varepsilon )\) is a solution of Lax pair (2) at \(\lambda = -i + \varepsilon \) and \(u = u[0]\), with the aid of Eq. (37), we can find \({\varphi _1}[0] = {({f_1}[0],{g_1}[0])^T}\) with
From Eq. (40), we find \({\varphi _1}[1] = {({f_1}[1],{g_1}[1])^T}\) with
From Eqs. (54) and (55), the one-rouge wave solution and two-rogue wave solution of \( \alpha =t, \beta = 0.5, \gamma = 2,\delta =3\) are obtained.
Then we will discuss the evolutions of the rogue wave solutions and show the relationship between rogue waves and the group dispersion velocity \(\alpha \), third order dispersion \(\beta \) and the amplification or absorption coefficient \(\delta \). In Figs. 8, 9 and 10, (a) and (b) represent three- and two- dimensional plots of one-rogue wave solution depicted by Eq. (54) respectively. (c) and (d) represent three- and two- dimensional plots of two-rogue wave solution depicted by Eq. (55) respectively. Figure 11 show the evolutions of one-rogue wave solution with different values of \(\alpha ,\beta \).




Evolutions of the one-rogue wave solution represented by Eq. (54) with \(\gamma = 2,\delta =3\)
In Figs. 8, 9 and 10, we take the group dispersion velocity coefficient \(\alpha \), third order dispersion coefficient\(\beta \), amplification or absorption coefficient \(\delta \) as t respectively, and observe the evolutions of the rogue wave solutions. In Fig. 11a, b, the one-rogue wave increases in amplitude and rotates counterclockwise as the third-order dispersion coefficient \(\beta \) increases. In Fig. 11a, c, the shape and width of the one-rogue wave change as the group dispersion velocity coefficient \(\alpha \) take different functions.
Conclusion
In summary, we have studied the generalized variable coefficients Hirota equation Eq. (1) and derived its Lax pair and DTs. Specifically, we have constructed a classical DT and got multisoliton solutions. Furthermore, rogue wave solutions also have been proposed explicitly by generalized DT. Finally, we have analyzed the dynamical features of these exact solutions. We believe that the results could be valuable in solving the inhomogeneity problems in optical fibers and plasma.
Data Availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
El-Labany, S.K., Moslem, W.M., El-Awady, E.I., Shukla, P.K.: Nonlinear dynamics associated with rotating magnetized electron-positron-ion plasmas. Phys. Lett. A 375(2), 159–164 (2010)
Liu, Y.Q., Wen, X.Y., Wang, D.S.: The N-soliton solution and localized wave interaction solutions of the (\(2+1\))-dimensional generalized Hirota–Satsuma–Ito equation. Comput. Math. Appl. 77(4), 947–966 (2019)
Li, B.Q., Ma, Y.L.: Extended generalized Darboux transformation to hybrid rogue wave and breather solutions for a nonlinear Schrödinger equation. Appl. Math. Comput. 386, 125469 (2020)
Moslem, W.M., Sabry, R., El-Labany, S.K., Shukla, P.K.: Dust-acoustic rogue waves in a nonextensive plasma. Phys. Rev. E 84(6), 066402 (2011)
Mollenauer, L.F., Stolen, R.H., Gordon, J.P.: Experimental observation of picosecond pluse narrowing and solitons in optical fibers. Phys. Rev. Lett. 45, 1095 (1980)
Hasgawa, A., Tappert, F.: Transmission of stationary nonlinear optical pulses in dispersive dielectric fibers. Appl. Phys. Lett. 23, 142–144 (1973)
Akhmediev, N., Ankiewicz, A., Taki, M.: Waves that appear from nowhere and disappear without a trace. Phys. Lett. A 373, 675 (2009)
Verosky, J.M.: Negative powers of Olver recursion operators. J. Math. Phys. 32(7), 1733–1736 (1991)
Wazwaz, A.M., Xu, G.Q.: An extended modified KdV equation and its Painlevé integrability. Nonlinear Dyn. 86, 1455 (2016)
Korepin, V.E., Bogoliubov, N.M., Izergin, A.G.: Quantum Inverse Scattering Method and Correlation Functions. Cambridge University Press, Cambridge (1993)
Ge, F.F., Tian, S.F.: Mechanisms of nonlinear wave transitions in the (\(2+1\))-dimensional generalized breaking soliton equation. Nonlinear Dyn. 105, 1753–1764 (2021)
Hirota, R., Ohta, Y.: Hierarchies of coupled soliton equations. J. Phys. Soc. Jpn. 60, 798 (1991)
Hirota, R.: Exact solution of the Korteweg–de Vries equation for multiple collisions of solitons. Phys. Rev. Lett. 27, 1192 (1971)
Zharinov, V.V.: Geometrical Aspects of Partial Differential Equations. World Scientific, Singapore (1992)
Gu, C.H., Hu, H., Zhou, Z.: Darboux Transformations in Integrable Systems. Springer, Nether lands (2005)
Zhang, Y., Yang, J.W., Chow, K.W., Wu, C.F.: Solitons, breathers and rogue waves for the coupled Fokaslenells system via Darboux transformation. Nonlinear Anal. Real World Appl. 33, 237–252 (2017)
Guo, B.L., Ling, L.M.: Rogue wave, breathers and bright-dark-rogue solutions for the coupled Schrödinger equations. Chin. Phys. Lett. 28(11), 110202 (2011)
Olver, P.J.: Applications of Lie Groups to Differential Equations. Springer, New York (1993)
Cantwell, B.J.: Introduction to Symmetry Analysis. Cambridge University Press, Cambridge (2002)
Wang, D.S., Wang, X.L.: Long-time asymptotics and the bright N-soliton solutions of the Kundu–Eckhaus equation via the Riemann–Hilbert approach. Nonlinear Anal. Real World Appl. 41, 334–361 (2018)
El-Shiekh, R.M., Gaballah, M., Elelamy, A.F.: Similarity reductions and wave solutions for the 3D-Kudryashov–Sinelshchikov equation with variable-coefficients in gas bubbles for a liquid. Results Phys. 40, 105782 (2022)
El-Shiekh, R.M., Gaballah, M.: New rogon waves for the nonautonomous variable coefficients Schrödinger equation. Opt. Quant. Electron. 53, 431 (2021)
Gaballah, M., El-Shiekh, R.M., Akinyemi, L., Rezazadeh, H.: Novel periodic and optical soliton solutions for Davey–Stewartson system by generalized Jacobi elliptic expansion method. Int. J. Nonlinear Sci. Numer. Simul. (2022). https://doi.org/10.1515/ijnsns-2021-0349
El-Shiekh, R.M., Gaballah, M.: New analytical solitary and periodic wave solutions for generalized variable-coefficients modified KdV equation with external-force term presenting atmospheric blocking in oceans. J. Ocean Eng. Sci. 7, 372–376 (2022)
El-Shiekh, R.M., Gaballah, M.: Integrability, similarity reductions and solutions for a (\(3+1\))-dimensional modified Kadomtsev–Petviashvili system with variable coefficients. Partial Differ. Equ. Appl. Math. 6, 100408 (2022)
El-Shiekh, R.M., Al-Nowehy, A.-G.A.A.H.: Symmetries, reductions and different types of travelling wave solutions for symmetric coupled burgers equations. Int. J. Appl. Comput. Math. 8, 179 (2022)
Gu, C.H., Zhou, Z.X.: On the Darboux matrices of Bäcklund transformations for AKNS systems. Lett. Math. Phys. 13, 179 (1987)
Guo, B.L., Ling, L.M., Liu, Q.P.: Nonlinear Schrödinger equation: generalized Darboux transformation and rogue wave solutions. Phys. Rev. E 85, 026607 (2012)
Du, Z., Tian, B., Chai, H.P., Yan, S.: Darboux transformations, solitons, breathers and rogue waves for the modified Hirota equation with variable coefficients in an inhomogeneous fiber. Opt. Quant. Electron. 50, 83 (2018)
Ono, H.: Soliton fission in anharmonic lattices with reflectionless inhomogeneity. J. Phys. Soc. Jpn. 61, 4336 (1992)
Leblond, H., Grelu, P., Mihalache, D.: Models for supercontinuum generation beyond the slowly-varying-envelope approximation. Phys. Rev. A 90, 053816 (2014)
Rajan, M.M., Mahalingam, A.: Nonautonomous solitons in modified inhomogeneous Hirota equation: soliton control and soliton interaction. Nonlinear Dyn. 79, 2469–2484 (2015)
Gao, X.Y.: Looking at a nonlinear inhomogeneous optical fiber through the generalized higher-order variable-coefficient Hirota equation. Appl. Math. Lett. 73, 143–149 (2017)
Tao, Y.S., He, J.S.: The multi-solitons, breathers and rogue waves for the Hirota equation generated by Darboux transformation. Phys. Rev. E 85, 026601 (2012)
Hirota, R.: Exact envelope-soliton solutions of a nonlinear wave equation. J. Math. Phys. 14, 805 (1973)
Ankiewicz, A., Soto-Crespo, J.M., Akhmediev, N.: Rogue waves and rational solutions of the Hirota equation. Phys. Rev. E 81, 046602 (2010)
Wang, D.S., Chen, F., Wen, X.Y.: Darboux transformation of the general Hirota equation: multisoliton solutions, breather solutions, and rogue wave solutions. Adv. Differ. Equ. 2016(1), 67 (2016)
Wadati, M.: The modified Korteweg–de Vries equation. J. Phys. Soc. Jpn. 34, 1289 (1973)
Wang, X., Zhang, J., Wang, L.: Conservation laws, periodic and rational solutions for an extended modified Korteweg–de Vries equation. Nonlinear Dyn. 92, 1507–1516 (2018)
Wang, P., Tian, B., Liu, W.J., Jiang, Y., Xue, Y.S.: Interactions of breathers and solitons of a generalized variable-coefficient Korteweg–de Vries-modified Korteweg–deVries equation with symbolic computation. Eur. Phys. J. D 66, 233 (2012)
Hu, Y.R., Zhang, F., Xin, X.P., Liu, H.Z.: Darboux transformation, soliton solutions of the variable coefficient nonlocal modified Korteweg–de Vries equation. Comput. Appl. Math. 41, 139 (2022)
Baronio, F., Degasperis, A., Conforti, M., Wabnitz, S.: Solutions of the vector nonlinear Schrödinger equations: evidence for deterministic rogue waves. Phys. Rev. Lett. 109, 044102 (2012)
Xu, S.W., He, J.S.: The Darboux transformation of the derivative nonlinear Schrödinger equation. J. Phys. A 44, 305203 (2011)
Zhang, H.Y., Zhang, Y.F.: Generalized Darboux transformation, semi-rational solutions and novel degenerate soliton solutions for a coupled nonlinear Schrödinger equation. Eur. Phys. J. Plus 136, 459 (2021)
Wang, X.B., Han, B.: Characteristics of rogue waves on a soliton background in a coupled nonlinear Schrödinger equation. Math. Meth. Appl. Sci. 42(8), 2586–2596 (2019)
Du, X.X., Tian, B., Tian, H.Y., Sun, Y.: Lax pair, interactions and conversions of the nonlinear waves for a (\(2+1\))-dimensional nonlinear Schrödinger equation in a Heisenberg ferromagnetic spin chain. Eur. Phys. J. Plus 136, 753 (2021)
Acknowledgements
We sincerely thank Professor D. S. Wang and Y. Q. Liu for their warm help and valuable discussions. We aslo thank the National Natural Science Foundation of China under Grant Nos. 12275017 and 12201333, the Natural Science Foundation of Shandong Province No. ZR2021QA034, the Natural Science Foundation of Guangdong Province No. 2021A1515010361, and the Cultivation Fund of Qilu University of Technology (Shandong Academy of Sciences) Nos. 2022PX086 and 2022PT071.
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Contributions
Dan Wang wrote the main manuscript. Mengkun Zhu and Xiaoli Wang provided major revisions to the manuscript. Shuli Liu and Wenjing Han contributed valuable comments to the manuscript. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Wang, D., Liu, S., Han, W. et al. Darboux Transformation, Soliton Solutions of a Generalized Variable Coefficients Hirota Equation. Int. J. Appl. Comput. Math 9, 57 (2023). https://doi.org/10.1007/s40819-023-01540-4
Accepted:
Published:
DOI: https://doi.org/10.1007/s40819-023-01540-4