
Abstract
This article discusses a numerical iterative scheme for the solution of a class of nonlinear singular boundary value problems. It introduces a recent approach, based on Green’s functions and Picard’s and Mann’s fixed-point iterations procedures, to tackle such problems. The convergence analysis of the proposed method is presented to verify its efficiency. A number of examples are given to demonstrate the applicability of the method. The numerical experiments show that this approach is better than many other existing techniques and that it is reliable, accurate and less time consuming.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Nonlinear singular boundary value problems (SBVPs) have been studied by many mathematicians, physicists and engineers. They used different methods in order to achieve the most accurate numerical solutions and that require the least CPU time. In recent years, a wide spectrum of papers have been devoted to solve such problems. For instance, Motsa and Sibanda [25] presented a novel approach to solve nonlinear SBVP arising in physiology for the study of tumour growth. They used successive linearization method (SLM) and compared their numerical results to those obtained by other methods such as ordinary cubic spline method [16], finite differences (see Pandey and Singh [29] and the references therein), Adomian decomposition method (ADM) [33], third degree B-spline [3], non-polynomial cubic splines [20], and cubic B-spline collocation [16]. Moreover, other papers proposed alternate computational methods based on Bernstein polynomials, via the transformation of the original problem to an eigenvalue problem then applying an open domain MATLAB collocation code “bvpsuite” to solve the nonlinear SBVPs [30]. In [33], Singh and Kumar used a new technique based on Green’s function and the Adomian decomposition method (ADM) for solving nonlinear singular boundary value problems (SBVPs). In [27] Niu et al. used a simplified reproducing kernel method and least squares approach for solving nonlinear singular boundary value problems. Other techniques include piecewise shooting reproducing kernel method [7, 8], mixed decomposition-spline approach [22], variational iteration method [15, 34], topological techniques [6], Padé approximation and collocation methods [1], a fourth order method [4], and other novel numerical methods such as those in [2, 5, 10, 11, 17,18,19,20, 23, 24, 31, 32].
Some applications of nonlinear singular boundary value problems (SBVPs) for ordinary differential equations arise in many branches of applied mathematics, engineering such as chemical reactions, sciences such as nuclear physics and many others. For instance, it arises in the theory of electro-hydrodynamics and in the radial stress on a rotationally symmetric shallow membrane cap. In addition, it describes the equilibrium of the isothermal gas sphere and finds the distribution of heat sources in the human head. Last but not least, it has application for finding the steady-state oxygen diffusion in a spherical cell (see [9] and [33] and the references therein).
In this paper, a recently introduced iterative method based on Green’s functions and fixed-point iteration schemes, such as Picard’s and Mann’s procedures, is presented for the approximate solution of a generalized class of nonlinear SBVPs (see [13, 14, 18, 21, 22] and the references therein). Five examples are considered and the results are compared with other numerical methods. The objective is to show that the iterative procedure yields relatively highly accurate approximate solutions and converges rapidly. Proof of convergence as well as rate of convergence are also included in our study.
An outline of the paper is as follows. To begin with, we will present the definition and construction of the Green’s function and then designate the fixed-point iteration method. A proof of convergence of the scheme as well as its rate of convergence will be included. Moving on, we will investigate five different nonlinear SVBPs to show the efficiency and high accuracy of the method. Finally, we will summarize our findings.
Description of the Iteration Method
Green’s Function
To construct the Green’s function for certain SBVPs, consider first the following linear second order equation:
for \(a<x<b\) with boundary conditions
The general solution is given by \(u=u_h+u_p\) where \(u_h\) is the solution to \(L[u]=0\) subject to the boundary conditions (2), and \(u_p\) is the solution to \(L[u]=f(x)\) satisfying the corresponding homogeneous boundary conditions
To find \(u_p\), we first seek a solution for
subject to the conditions (3); this solution is referred to as the Green’s function G(x|s). Then
Let \(u_1 , u_2\) be two linearly independent solutions of \(L[u]=0.\) The Green’s function satisfies the homogeneous equation for \(x\not =s\) and hence will be a linear combination of the solutions \(u_1, u_2:\)
The constants \(c_1,c_2,d_1,d_2\) are determined using the following conditions:
-
(i)
Homogeneous BCs:
$$\begin{aligned} B_a[G(x|s)]=B_b[G(x|s)]=0. \end{aligned}$$ -
(ii)
Continuity of G at \(x=s:\)
$$\begin{aligned} c_1u_1(s)+c_2u_2(s) = d_1u_1(s)+d_2u_2(s). \end{aligned}$$ -
(iii)
Jump discontinuity of \(G^\prime \) at \(x=s\):
$$\begin{aligned} d_1u_1^{\prime }(s) + d_2 u_2^{\prime }(s)- c_1u_1^{\prime }(s)-c_2u_2^{\prime }(s)=1. \end{aligned}$$
For nonlinear SBVPs
the particular solution satisfies
where G is the Green’s function corresponding to (6).
Picard’s Green’s Scheme (PGS)
In this section, we will describe and detail our proposed method. Let’s consider a class of SVBPs of the form:
with the boundary conditions (2). Let G be the Green’s function for the linear term and define the integral operator
Using (7), we can rewrite the latter equation as:
For convenience, let’s drop \(u_p\) and denote it by u. It follows that
Applying Picard’s iteration on K[u], namely
yields the following iterative procedure:
where \(L[u_n]\) is the linear term for the second order differential equation. The initial iterate \(u_0\) is chosen to satisfy the corresponding homogenous equation in (8), \(L[u]=0\), and the specified boundary conditions.
Mann’s Green’s Embedded Method (MGS)
Next, we apply the following Mann’s iterative algorithm for the approximation of fixed points, using the operator defined in (9):
Following the very similar steps as in the previous subsection, this results in the iterative scheme (MGS):
where \(\left\{ \alpha _{n}\right\} \) is a sequence of numbers that control the stability and speed up the convergence of the scheme. The starting function \(u_0\) is chosen to be the solution for the corresponding homogenous equation \(L[u]=0\) subject to the specified boundary conditions (2).
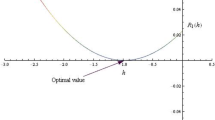
The optimal values of the sequence \(\left\{ \alpha _{n}\right\} \) is found by minimizing the \(L^2\)-norm of the residual error, \(R_n(x;\alpha _n)\), of the \(n^{th}\) iteration \(u_n\), namely
where for each n, \(R_n(x;\alpha _n)\) is given by
It is worth mentioning that with the proper choice of the parameters \(\alpha _n\)’s, the stability of the scheme can be controlled. For more details on the stability see [11].
Convergence Analysis of the PGS
This section includes the convergence analysis of the Picard’s scheme. The analysis is based on the contraction principle [28]. Without loss of generality, we prove convergence of the PGS that applies to the following boundary value problem:
where \(p \ge 2\), and complimented with the boundary conditions:
First, we construct the Green’s function for (16) using the properties detailed in Sect. 2.1. Solving the corresponding homogeneous equation of (16), which is a Cauchy–Euler equation, we have
Applying the corresponding homogenous BCs of (17), that is \(u^\prime (0) = u(1) = 0\), we get the two equations
The continuity of the Green’s function gives the equation
The unit jump discontinuity of the first derivative of the Green’s function results in the equation
Solving the system of equations in (19)–(21), we get the Green’s function
Substituting this latter Green’s function in the PGS iterative procedure given in (12), we get the following PGS procedure that corresponds to the BVP in (16), (17):
The next theorem gives convergence of the scheme.
Theorem 1
Assume that \(\displaystyle {f\left( x, u, u^{\prime }\right) }\) is a continuous function whose derivative is bounded with respect to u. Assume that
where
Then, the iterative sequence \(\left\{ u_n(x)\right\} _{n=1}^{\infty }\), given by (23), where \(x \in [0, 1]\) and using any bounded starting function on [0, 1], converges uniformly to the exact solution, u(x), of problem (16)–(17).
Proof
In order to prove the convergence, we will use the function space C[0, 1] equipped with the maximum norm defined by \(\displaystyle {\Vert u\Vert = \max _{0 \le x \le 1} \left| u(x)\right| }\).
Direct integration leads to
Integrating twice by parts we get
Integrating once by parts we get
Substituting the results of (24)–(26) into the iterative scheme (PGS) given in (23), we have
Equivalently, we have
where \(\beta =u_n(1)\), from (17), and
Define \(T_G: C[0,1] \rightarrow C[0,1]\) to be the right side of Eq. (28):
According to Banach-Picard fixed point theorem, to prove convergence it suffices to show that \(T_G\) is a contractive mapping. Therefore, we have
Simple integration gives
The maximum value of the absolute value of the function g(x) on the interval [0, 1] occurs either at the critical points or endpoints.
Using (32) and (33), we have from (31)
Applying the Mean Value Theorem for f, we obtain
where \(\displaystyle { \Vert u - v \Vert = \max _{0 \le x \le 1} |u(x) - v(x)|}\) and \(\displaystyle {L_c = \max _{[0, 1] \times R^3} \left| \frac{\partial }{\partial u}f(x, u, u^\prime )\right| }\). From the hypothesis of the theorem, namely that \(\displaystyle {K := \frac{1}{2(p+1)} L_c < 1,}\) it follows that
with \(0< K < 1\). This proves that \(T_G\) is a contraction mapping.
In regard to the rate of convergence, we have
If \(m> n > 0,\) then
If we let \(m \rightarrow \infty \), we get the error estimate:
\(\square \)
Numerical Examples
In this section, we will implement the Picard’s Green’s scheme for the solution of a nonlinear second order SBVPs. We will compare our numerical results with existing numerical solutions to confirm the validity and high accuracy of the strategy.
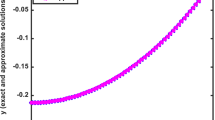
Example 1
Consider the following nonlinear SBVP describing the equilibrium of isothermal gas sphere [4], which is taken from Singh and Kumar [33]:
where \(0< x < 1\) and subject to
The exact solution is given by \(u(x)=\sqrt{\frac{3}{3+x^2}}\).
Constructing the Green’s function for the linear equation \(L[u]=u^{\prime \prime }=0\) and complimented with the homogeneous BCs \(u^{\prime }(0)=0\) and \(u(1)=0\), results in the subsequent form of the PGS (12).
The initial iterate is the solution of \(L[u]=0\) subject to the BCs (41), which is found to be \(u_0=\sqrt{\frac{3}{4}}\).
For quantitative comparison, we now define \(E_n\) as the results obtained via the Picard Green’s function approach (PGS), while \(V_n[19]\), \({W}_{n}[6]\), and \(Z_n[23]\) are those obtained by the techniques proposed by Singh and Kumar [33], Geng [8], and Niu et al. [27] respectively. Numerical results of this SBVP, as reported in Table 1 below, confirm that our strategy is more accurate than the latter three methods combined.
It can be shown that the contraction constant for the corresponding PGS is \(\displaystyle {K=\frac{L_c}{2(p+1)}}\) which is equal to 5 / 6. This yield slow convergence since K is close to 1. Thus, the results by the PGS may be improved if we use the MGS (23). The best choice for the value of \(\alpha \) to minimize the absolute error in \(E_3\) is found to be \(\alpha ^*=1.43\); for simplicity this value is kept constant for the other iterations. The results are displayed in Table 2.
Example 2
Consider the following nonlinear SBVP, which is taken from Singh and Kumar [33]:
where \(0 < x \le 1\) and subject to
This problem is known as the Emden-Fowler equation of the second kind and arises in the study of distribution of heat sources in the human head [9]. The exact solution is not known explicitly.
The Green’s function for the linear equation \(L[u]=u^{\prime \prime }=0\) subject to homogeneous BCs, results in the subsequent form of the PGS (12).
where the initial iterate is found to be \(u_0=0\). Table 3 confirms that the PGS strategy is more accurate, when comparing the numerical results \(E_n\) of this SBVP using our introduced procedure and the numerical results \(V_n\) obtained by Singh and Kumar [33] method and \(Z_{10}\) obtained by Niu et al. approach [27].
Example 3
Consider the following nonlinear SBVP, which is taken from Khuri and Sayfy [18]:
where \(0< x < 1\) and subject to
The exact solution is given by \(u(x)=2\ln \left( {\frac{A+1}{Ax^2+1}}\right) \), where \(A=3-2\sqrt{2}.\)
Similar to the previous example, the problem is also known as the Emden-Fowler equation of the second kind. The Green’s function for the linear equation \(L[u]=u^{\prime \prime }=0\), results in the subsequent form of the PGS (12).
where the initial iterate is found to be \(u_0=0\).
Again \(E_n\) is defined as the results of our PGS approach, while \(T_n\), \(V_n[3]\), \({{W}_{n}[6]}\) and \(Z_{64}[23]\) are the results obtained by the techniques proposed by Singh and Kumar [33], Caglar and Caglar and Ozer [3], Geng [8], and Niu et al. [27] respectively. A comparison is summarized in Table 4.
Example 4
Consider the following nonlinear SBVP arising in the study of steady-state oxygen diffusion in spherical cell [34], which is taken from Singh and Kumar [33]:
subject to
where \(n=0.76129\) is the reaction rate and \(k=0.03119\) is the Michaelis constant (see [16, 18, 34]).
This above nonlinear SBVP arises in the study of steady-state oxygen diffusion in a spherical cell. The exact solution is not known explicitly. The Green’s function for the linear equation \(L[u]=u^{\prime \prime }=0\) subject to homogeneous BCs, results in the subsequent form of the PGS (12):
where initial iterate \(u_0=1\), and \(\alpha =1\). \(E_n\) is defined as the maximum absolute error of our PGS approach while \(V_n\) is the maximum absolute error obtained by the technique proposed by Singh and Kumar [33]. The results in Table 5 below confirm that the Green’s function approach is more accurate than the other existing method.
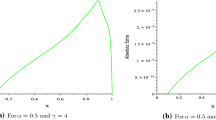
Example 5
Finally we consider the following nonlinear SBVP, which is also taken from Singh and Kumar [33]:
where \(0 < x \le 1\) and subject to
This nonlinear SBVP arises in the radial stress on a rotationally symmetric shallow membrane cap [15]. The exact solution is not known explicitly. The Green’s function for the linear equation \(L[u]=u^{\prime \prime }=0\) subject to homogeneous BCs, results in the subsequent form of the PGS (12).
where the initial iterate is \(u_0=1\). \(E_n\) is defined as the maximum absolute error of Green’s function approach while \(R_n\) is the maximum absolute error obtained by the proposed technique in Singh and Kumar [33]. After comparing the results in the Table 6, we assure that the PGS strategy is more accurate.
Conclusion
In this paper, a recent approach based on embedding Green’s function into fixed-point iteration, is used to solve an extended class of second order nonlinear singular boundary value problems. Five test problems have been considered that demonstrate the efficiency of the scheme. The results confirmed the convergence of the scheme numerically. This claim has been justified by proving convergence of the proposed scheme as well as its rate of convergence. Moreover, the scheme seems to be computationally highly accurate for solving the given class of nonlinear SBVPs, when it compared with other existing methods. In future work, we plan to apply the proposed approach to optimal control problems (see [12, 26]).
References
Allouche, H., Tazdayte, A.: Numerical solution of singular boundary value problems with logarithmic singularities by Padé approximation and collocation methods. J. Comput. Appl. Math. 311, 324–341 (2017)
Baleanu, D., Khan, H., Jafari, H., Khan, R.A., Alipour, M.: On existence results for solutions of a coupled system of hybrid boundary value problems with hybrid conditions. Adv. Differ. Equ. 2015(1), 318 (2015)
Caglar, H., Caglar, N., Özer, M.: B-spline solution of non-linear singular boundary value problems arising in physiology. Chaos Solitons Fractals 39(3), 1232–1237 (2009)
Chawla, M., Subramanian, R., Sathi, H.: A fourth order method for a singular two-point boundary value problem. BIT Numer. Math. 28, 88–97 (1988)
Dumitru Baleanu, D., Jafari, H., Khan, H., Johnston, S.J.: Results for Mild solution of fractional coupled hybrid boundary value problems. Open Math. 13(1), 601–608 (2015)
Fewster-Young, N.: Existence of solutions to the nonlinear, singular second order Bohr boundary value problems. Nonlinear Anal. Real World Appl. 36, 183–202 (2017)
Geng, F., Cui, M.: Solving singular nonlinear second-order periodic boundary value problems in the reproducing kernel space. Appl. Math. Comput. 192(2), 389–398 (2007)
Geng, F., Tang, Z.: Piecewise shooting reproducing kernel method for linear singularly perturbed boundary value problems. Appl. Math. Lett. 62, 1–8 (2016)
Goodman, A.M., Duggan, R.C.: Pointwise bounds for a nonlinear heat. Bull. Math. Biol. 48, 229–236 (1986)
Hajipour, M., Jajarmi, A., Baleanu, D.: On the accurate discretization of a highly nonlinear boundary value problem. Numer. Algorithms 2017, 1–17 (2017)
Hajipour, M., Hosseini, S.M.: The performance of a Tau preconditioner on systems of ODEs. Appl. Math. Model. 35(1), 80–92 (2011)
Jajarmi, D., Pariz, N., Effati, S., Kamyad, A.V.: Infinite horizon optimal control for nonlinear interconnected large-scale dynamical systems with an application to optimal attitude control. Asian J. Control 14(5), 1239–1250 (2012)
Kafri, H., Khuri, S.: Bratu’s problem: a novel approach using fixed-point iterations and Green’s functions. Comput. Phys. Commun. 198(1), 97–104 (2016)
Kafri, H., Khuri, S., Sayfy, A.: A new approach based on embedding Green’s functions into fixed-point iterations for highly accurate solution to Troesch’s problem. Int. J. Comput. Methods Eng. Sci. Mech. 17(2), 93–105 (2016)
Kanth, A., Aruna, K.: He’s variational iteration method for treating nonlinear singular boundary value problems. Comput. Math. Appl. 60(3), 821–829 (2010)
Kanth, A., Bhattacharya, V.: Cubic spline for a class of non-linear singular boundary value problems arising in physiology. Appl. Math. Comput. 174(1), 768–774 (2006)
Khuri, S.A.: An alternative solution algorithm for the nonlinear generalized Emden–Fowler equation. Int. J. Nonlinear Sci. Numer. Simul. 2(3), 299–302 (2001)
Khuri, S.A., Sayfy, A.: A novel approach for the solution of a class of singular boundary value problems arising in physiology. Math. Comput. Model. 52, 626–636 (2010)
Khuri, S.A., Sayfy, A.: The boundary layer problem: a fourth-order adaptive collocation approach. Comput. Math. Appl. 64(6), 2089–2099 (2012)
Khuri, S.A., Sayfy, A.: A spline collocation approach for a generalized parabolic problem subject to non-classical conditions. Appl. Math. Comput. 218(18), 9187–9196 (2012)
Khuri, S., Sayfy, A.: A novel fixed point scheme: proper setting of variational iteration method for BVPs. Appl. Math. Lett. 48(4), 75–84 (2015)
Khuri, S., Sayfy, A.: A mixed decomposition-spline approach for the numerical solution of a class of singular boundary value problems. Appl. Math. Model. 40(7–8), 4664–4680 (2016)
Lima, P., Morgado, M., Schöbinger, M., Weinmüller, E.: A novel computational approach to singular free boundary problems in ordinary differential equations. Appl. Numer. Math. 114, 97–107 (2017)
Marin, M., Baleanu, D., Carstea, C., Ellahi, R.: A uniqueness result for final boundary value problem of microstretch bodies. J. Nonlinear Sci. Appl. 10, 1908–1918 (2017)
Motsa, S., Sibanda, P.: A linearisation method for non-linear singular boundary value problems. Comput. Math. Appl. 63(7), 1197–1203 (2012)
Nik, H.S., Rebelo, P., Zahedi, M.S.: Solving infinite horizon nonlinear optimal control problems using an extended modal series method. J. Zhejiang Univ. Sci. C 12(8), 667–677 (2011)
Niu, J., Xu, M., Lin, Y., Xue, Q.: Numerical solution of nonlinear singular boundary value problems. J. Comput. Appl. Math. 331, 42–51 (2018)
Osilike, M.O.: Stability of the Mann and Ishikawa iteration procedures for \(\phi \)-strong pseudocontractions and nonlinear equations of the \(\phi \)-strongly accretive type. J. Math. Anal. Appl. 227, 319–334 (1998)
Pandey, R.K., Singh, A.K.: On the convergence of a finite difference method for a class of singular boundary value problems arising in physiology. J. Comput. Appl. Math. 166, 553–564 (2004)
Pirabaharan, P., Chandrakumar, R.: A computational method for solving a class of singular boundary value problems arising in science and engineering. Egypt. J. Basic Appl. Sci. 3(4), 383–391 (2016)
Rashidinia, J., Mohammadi, R., Jalilian, R.: The numerical solution of non-linear singular boundary value problems arising in physiology. Appl. Math. Comput. 185, 360–367 (2007)
Roul, P., Warbhe, U.: A novel numerical approach and its convergence for numerical solution of nonlinear doubly singular boundary value problems. J. Comput. Appl. Math. 296, 661–676 (2016)
Singh, R., Kumar, J.: An efficient numerical technique for the solution of nonlinear singular boundary value problems. Comput. Phys. Commun. 185(4), 1282–1289 (2014)
Wazwaz, A.M.: The variational iteration method for solving nonlinear singular boundary value problems arising in various physical models. Commun. Nonlinear Sci. Numer. Simul. 16(10), 3881–3886 (2011)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Assadi, R., Khuri, S.A. & Sayfy, A. Numerical Solution of Nonlinear Second Order Singular BVPs Based on Green’s Functions and Fixed-Point Iterative Schemes. Int. J. Appl. Comput. Math 4, 134 (2018). https://doi.org/10.1007/s40819-018-0569-8
Published:
DOI: https://doi.org/10.1007/s40819-018-0569-8