
Abstract
In this article, a delayed reaction-diffusion model of hepatitis B virus (HBV) infection with HBV DNA-containing capsids and cytotoxic T lymphocyte (CTL) immune response is presented and investigated by incorporating the spatial mobility of both capsids and virions. Also, the discrete time delays in the production of productively infected hepatocytes and matured capsids are taken into account in this model. First, the well-posedness of the concerned model is established in terms of existence, uniqueness, non-negativity and boundedness of solutions. The threshold conditions in terms of basic reproduction number \(R_{0}\) and immune response reproduction number \(R_{CTL}\) for global stability of the three spatially homogeneous steady states are established by constructing appropriate Lyapunov functions and by using linearization technique. We show that disease-free steady state, immune-free steady state and interior steady state with CTL immune response are globally asymptotically stable if \(R_{0}\le 1\), \(R_{CTL}\le 1<R_{0}\) and \(R_{CTL}>1\), respectively. Finally, several numerical simulations are carried out in order to illustrate the theoretical results obtained.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Hepatitis B virus (HBV) infection has emerged as a critical global health problem. The infection is caused from infection of liver cells (hepatocytes) by HBV which is a member of Hepadnaviridae family of viruses [1]. The infection can be acute or chronic in nature. While acute illness lasts for several weeks and resolves in the majority of cases with predominant immune responses, the chronic illness can eventually lead to spectrum of severe diseases such as liver cirrhosis, membranous glomerulonephritis and hepatocellular carcinoma (HCC) [2]. As one of the key factors, immune responses play an important role for determining whether the infection is acute or chronic [1]. During the infection of hepatocytes, HBV gets converted into covalently closed circular DNA (cccDNA) inside the nucleus of the infected hepatocyte [2, 3]. The several copies of cccDNA produce the pre-genomic and sub-genomic mRNAs and pre-genomic mRNA then follows reverse transcription procedure to become DNA which leads to the production of HBV DNA-containing capsid [2, 3]. These HBV DNA-containing capsids are then transmitted to plasma to get converted into virus particles [2, 3].
For the past few decades, several mathematical models have been proposed and investigated to understand the mechanisms and dynamics of within-host viral infections by using ordinary differential equations (ODEs), delay differential equations (DDEs) and partial differential equations (PDEs). Nowak et al. [4] introduced a basic HBV infection model comprising a system of three ODEs. Nowak and Bangham extended this basic viral infection model by incorporating cytotoxic T lymphocyte (CTL) immune responses in [5]. By incorporating a standard incidence function in place of the mass action term for the infection process, Min et al. [6] amended the basic model in [4]. Wang et al. [7] further extended this model by taking into account the cytokine-mediated cure of infected hepatocytes and performed a global stability analysis. In [8], Hews et al. extended the basic model by replacing the constant infusion of uninfected hepatocytes with a logistic growth term and the mass action term for infection process by a standard incidence function. Li et al. [9] showed the presence of Hopf bifurcation for an HBV infection model with logistic hepatocyte growth. Manna and Chakrabarty presented and investigated an HBV infection model with intracellular HBV DNA-containing capsids in [10]. Herz et al. [11] introduced a delayed viral infection model by incorporating intracellular delay for virus production from an infected cell. Gourley et al. [12] proposed and analyzed a delay-induced HBV infection model with a standard incidence function. Eikenberry et al. [13] presented and analyzed a delay-induced HBV infection model with logistic hepatocyte growth and a standard incidence function. Manna and Chakrabarty proposed and studied global properties of an HBV infection model with two discrete delays and capsids in [14]. Pang et al. investigated the role of cytolytic and non-cytolytic mechanisms of CTL cells for HBV infection in [15]. Global stability of a delay-induced HBV infection model with a standard incidence function and CTL immune responses has been discussed in [16]. Recently, Manna [17] discussed the global properties of an HBV infection model with capsids and CTL immune responses.
It is observed that biological motions of populations play an important role in many biological processes [18]. But the models discussed above ignore such spatial mobility of related populations by considering that the populations are well mixed [19]. In recent years, several PDE driven mathematical models of viral infection have been proposed and investigated. Wang and Wang [20] proposed and analyzed a diffusive HBV infection model by taking into account the free movement of viruses in liver and neglecting the spatial mobility for susceptible and infected hepatocytes. Wang et al. [21] further extended the model by incorporating a time delay in the production of productively infected hepatocytes and investigated the dynamics. The existence of traveling wave solutions to this extended model was discussed in [22]. Xu and Ma [23] proposed and analyzed a similar delayed diffusive HBV infection model with saturation response term for the infection process. Chí et al. also studied the dynamics of a similar type of HBV infection model in [24]. Zhang and Xu [25] investigated the dynamics of a diffusion-driven HBV infection model with Beddington-DeAngelis functional response and delay. Similar analysis was carried out in [26] for a delayed diffusive viral infection model with a specific nonlinear functional response. In [27], Hattaf and Yousfi considered a generalized diffusive HBV infection model with two delays and analyzed it. In [28], they showed how Lyapunov functions obtained from ODE-driven viral infection models can be used to prove the global stability of the corresponding reaction-diffusion systems. Shaoli et al. [29] investigated the global properties of a diffusive HBV infection model with CTL immune response and a nonlinear incidence function. By considering the spatial mobility of both capsids and virions, Manna and Chakrabarty [30] analyzed the global properties of a diffusive HBV infection model and further, presented a suitable non-standard finite difference (NSFD) scheme for it. Manna [31] studied the dynamical behaviors of a delayed version of the model presented in [30]. Recently, Xu et al. [32] studied the global stability of a delayed diffusive viral infection model with a general nonlinear incidence rate and developed a dynamically consistent NSFD scheme for the model. Wang et al. [33] investigated the role of density-dependent diffusion in the viral infection process. They analyzed both single-strain and multi-strain viral infection models. Kang et al. presented and analyzed a delayed diffusive viral infection model with Crowley-Martin incidence function and CTL immune response in [34]. Miao et al. [35] investigated global dynamics of a delayed diffusive viral infection model with general incidence function and adaptive immune response. Geng et al. showed the global stability of a delayed diffusive viral infection model with nonlinear incidence rate and the dynamic consistency of the corresponding discrete model in [36].
Taking motivation from the above discussion, we propose the following reaction-diffusion system for HBV infection with CTL immune response:
where H(x, t), I(x, t), D(x, t), V(x, t) and Z(x, t) denote the densities of uninfected hepatocytes, infected hepatocytes, HBV DNA-containing capsids, virions and CTL cells at position x and at time t, respectively. The uninfected hepatocytes are produced from a source at a constant rate s with a natural death rate \(\mu \) and become infected at a rate k. The parameter \(\delta \) is the death rate for infected hepatocytes and capsids. Capsids are produced from infected hepatocytes at a rate a while \(\beta \) denotes the rate of viral replication from capsids and c represents the removal rate of virions. Infected hepatocytes are killed at a rate p while q and \(\sigma \) represent CTL responsiveness rate and decay rate of CTLs in absence of antigenic stimulation, respectively. Two delays \(\tau _{1}\) and \(\tau _{2}\) represent the delays in the production of productively infected hepatocytes and in the production of matured capsids, respectively. Here, the parameters \(d_{D}\) and \(d_{V}\) represent the diffusion coefficients of capsids and virions, respectively. The symbol \(\Delta \) is the Laplacian operator and \(\Omega \) is a connected, bounded spatial domain in \(\mathbb {R}^{n}\) with a smooth boundary \(\partial \Omega \). For the model (1), the initial conditions are given by
and the homogeneous Neumann boundary conditions are given by
where \(\tau =\max \{\tau _{1},\tau _{2}\}\), \(\phi _{i}(x,\theta )~~(i=1,2,3,4,5)\) are non-negative Hölder continuous functions in \(\bar{\Omega }\times [-\tau ,0]\) and \(\frac{\partial }{\partial \nu }\) denotes the outward normal derivative on the boundary \(\partial \Omega \). For the sake of convenience, a real-valued function \(\phi \) is said to be a Hölder continuous function in \(\bar{\Omega }\times [-\tau ,0]\) if there exist non-negative real constants K and \(\kappa \) such that \(\Vert \phi (\mathbf {x}_{1})-\phi (\mathbf {x}_{2})\Vert \le K\Vert \mathbf {x}_{1}-\mathbf {x}_{2}\Vert ^{\kappa }\), for all \(\mathbf {x}_{1}=(x_{1},\theta _{1}),\mathbf {x}_{2}=(x_{2},\theta _{2})\in \bar{\Omega }\times [-\tau ,0]\) [37].
Our main goal in this article is to investigate the dynamical behaviors of solutions for the model (1). The rest of this article is organized as follows. In the next section, we prove the existence, uniqueness, non-negativity and boundedness of the solutions of the model and discuss the existence of the spatially homogeneous steady states. In Sect. 3, we investigate the threshold conditions for global asymptotic stability of the corresponding steady states by constructing appropriate Lyapunov functions and by implementing linearization method. Further, Sect. 4 presents the illustrative numerical simulations. Finally, we end this article with concluding remarks in Sect. 5.
Well-Posedness and Steady States
In this section, our main purpose is to establish the existence, uniqueness, non-negativity and boundedness of solutions of system (1)–(3) since they represent the densities of uninfected hepatocytes, infected hepatocytes, HBV DNA-containing capsids, virions and CTL cells. Further, we discuss the existence of spatially homogeneous steady states of the model (1).
We first introduce some notations in order to show the non-negativity and boundedness of solutions of system (1)–(3). Let \(\mathcal {X}=C(\bar{\Omega },\mathbb {R}^{5})\) be a Banach space of continuous functions from \(\bar{\Omega }\) to \(\mathbb {R}^{5}\) and \(\mathcal {C}=C([-\tau ,0],\mathcal {X})\) be the Banach space of continuous functions from \([-\tau ,0]\) to \(\mathcal {X}\) equipped with the usual supremum norm. For the sake of convenience, an element \(\phi \in \mathcal {C}\) is a function from \(\bar{\Omega }\times [-\tau ,0]\) into \(\mathbb {R}^{5}\) and is defined by \(\phi (x,\theta )=\phi (\theta )(x)\). We define \(\omega _{t}\in \mathcal {C}\) by \(\omega _{t}(\theta )=\omega (t+\theta )\), \(\theta \in [-\tau ,0]\) for any continuous function \(\omega :[-\tau ,b)\rightarrow \mathcal {X}\) where \(b>0\).
Theorem 2.1
For any given initial data \(\phi \in \mathcal {C}\) satisfying the condition (2), there exists a unique solution of the system (1)–(3) defined on \([0,+\infty )\) and this solution remains nonnegative and bounded for all \(t\ge 0\).
Proof
For any initial data \(\phi =(\phi _{1},\phi _{2},\phi _{3},\phi _{4},\phi _{5})^{T}\in \mathcal {C}\) and \(x\in \bar{\Omega }\), let us define \(F=(F_{1},F_{2},F_{3},F_{4},F_{5}):\mathcal {C}\rightarrow \mathcal {X}\) by
Then we can rewrite the system (1)-(3) in terms of the following abstract functional differential equation :
where \(\omega =(H,I,D,V,Z)^{T}\), \(\phi =(\phi _{1},\phi _{2},\phi _{3},\phi _{4},\phi _{5})^{T}\) and \(A\omega =(0,0,d_{D}\Delta D,d_{V}\Delta V,0)^{T}\). Also, note that F is locally Lipschitz in \(\mathcal {X}\). We deduce that there exists a unique local solution of the system (4) on the interval \([0,T_{max})\), where \(T_{max}\) denotes the maximal existence time for solution of the system (4) [27, 31, 32].
It is easy to obtain that \(H(x,t)\ge 0\), \(I(x,t)\ge 0\), \(D(x,t)\ge 0\), \(V(x,t)\ge 0\) and \(Z(x,t)\ge 0\), since \(\mathbf {0}=(0,0,0,0,0)\) represents a lower-solution of the model (1).
In order to prove the boundedness of solutions, let us take \(W(x,t)=H(x,t-\tau _{1})+I(x,t)+\frac{p}{q}Z(x,t)\). This implies
where \(\gamma =\min \{\mu ,\delta ,\sigma \}\). Hence,
This implies that H, I and Z are bounded. Furthermore, from the bound for I and the system (1)-(3), it follows that D satisfies the following system
where \(\gamma _{1}=\max \left\{ \frac{s}{\gamma },\max _{x\in \bar{\Omega }}\{\phi _{1}(x,-\tau _{1})+\phi _{2}(x,0)+\frac{p}{q}\phi _{5}(x,0)\}\right\} \).
Let \(\widetilde{D}(t)\) be a solution to the following ODE
Thus, we obtain \(\widetilde{D}(t)\le \max \left\{ \frac{a\gamma _{1}}{\beta +\delta },\max _{x\in \bar{\Omega }}\phi _{3}(x,0)\right\} \) for all \(t\in [0,T_{max})\). From the comparison principle [38], it follows that \(D(x,t)\le \widetilde{D}(t)\). Therefore,
In a similar manner, we can show that
where \(\gamma _{2}=\max \left\{ \frac{a\gamma _{1}}{\beta +\delta },\max _{x\in \bar{\Omega }}\phi _{3}(x,0)\right\} \).
Till now from the above discussion, we can observe that H(x, t), I(x, t), D(x, t), V(x, t) and Z(x, t) are bounded on \(\bar{\Omega }\times [0,T_{max})\). Now, from the standard theory of semi-linear parabolic systems [39], we deduce that \(T_{max}=+\infty \). This completes the proof. \(\square \)
The basic reproduction number of the virus is given by \(R_{0}=\frac{a\beta sk}{c\delta \mu (\beta +\delta )}\) and the immune response reproduction number is given by \(R_{CTL}=\frac{a\beta skq}{\delta \{cq\mu (\beta +\delta )+a\beta \sigma k\}}\) [17]. In terms of biology, \(R_{0}\) represents the average number of newly infected hepatocytes from one infected hepatocyte at the beginning of the infection process whereas \(R_{CTL}\) represents the same in presence of CTL immune response [17]. From the expressions for \(R_{0}\) and \(R_{CTL}\), it is observed that the inequality \(R_{0}>R_{CTL}\) holds always and this is a biologically realistic relationship between \(R_{0}\) and \(R_{CTL}\). The model (1) admits three spatially homogeneous steady states:
-
1.
The disease-free steady state, \(E_{0}=\left( H_{0},I_{0},D_{0},V_{0},Z_{0}\right) =\left( \frac{s}{\mu },0,0,0,0\right) \), which exists always.
-
2.
The immune-free steady state, \(E_{1}=\left( H_{1},I_{1},D_{1},V_{1},Z_{1}\right) \), where \(H_{1}=\frac{c\delta (\beta +\delta )}{a\beta k}\), \(V_{1}=\left[ \frac{a\beta s}{c\delta (\beta +\delta )}-\frac{\mu }{k} \right] \), \(D_{1}=\frac{c}{\beta }V_{1}\), \(I_{1}=\frac{(\beta +\delta )}{a}D_{1}\) and \(Z_{1}=0\). The immune-free steady state, \(E_{1}\), exists when the basic reproduction number \(R_{0}>1\).
-
3.
The interior steady state with CTL immune response, \(E_{2}=\left( H_{2},I_{2},D_{2},V_{2},Z_{2}\right) \), where \(H_{2}=\frac{scq(\beta +\delta )}{cq\mu (\beta +\delta )+a\beta \sigma k}\), \(I_{2}=\frac{\sigma }{q}\), \(D_{2}=\frac{a}{(\beta +\delta )}I_{2}\), \(V_{2}=\frac{\beta }{c}D_{2}\), \(Z_{2}=\frac{\delta }{p}\left[ \frac{a\beta skq}{\delta \{cq\mu (\beta +\delta )+a\beta \sigma k\}}-1\right] \). The interior steady state with CTL immune response, \(E_{2}\), exists when the immune response reproduction number \(R_{CTL}>1\).
Stability Analysis
In this section, we investigate the global asymptotic stability of the corresponding steady states of the model (1) by constructing appropriate Lyapunov functions. For this purpose, we introduce the function \(G(u)=u-1-\ln u\) for \(u>0\) which will be used in Lyapunov functions. Note that \(G(u)=0\) if and only if \(u=1\). Also, let us assume that \(0=\lambda _{1}<\lambda _{2}<\dots<\lambda _{n}<\dots \) be the eigenvalues of the operator \(-\Delta \) on \(\Omega \) with the no-flux boundary conditions and \(\mathcal {E}(\lambda _{i})\) be the eigenfunction space corresponding to \(\lambda _{i}\) in \(C^{1}(\Omega )\). Let \(\{\psi _{ij}:~j=1,2,\dots ,\dim \mathcal {E}(\lambda _{i})\}\) represent an orthonormal basis of \(\mathcal {E}(\lambda _{i})\), \(\mathbb {X}_{ij}=\{d\psi _{ij}:~d\in \mathbb {R}^{5}\}\) and \(\mathbb {X}=[C^{1}(\Omega )]^{5}\). Then we have
Let \(E_{*}\left( H_{*},I_{*},D_{*},V_{*},Z_{*}\right) \) denote an arbitrary steady state of the system (1)-(3) and consider the following perturbation about the steady state variables:
Linearizing the system (1) about \(E_{*}\), we arrive at the following linearized system
where
We define \(\mathcal {L}U=\mathcal {D}\Delta U+J_{1}U(x,t)+J_{2}U(x,t-\tau _{1})+J_{3}U(x,t-\tau _{2})\). Now, \(\mathbb {X}_{i}\) is invariant under the operator \(\mathcal {L}\) for all \(i\ge 1\). Also, \(\xi \) is an eigenvalue of \(\mathcal {L}\) if and only if it is a root of the equation \(\det (-\lambda _{i}\mathcal {D}+J_{1}+J_{2}e^{-\xi \tau _{1}}+J_{3}e^{-\xi \tau _{2}}-\xi \mathbb {I}_{5})=0\) for some \(i\ge 1\) and in this case, there exists an eigenvector in \(\mathbb {X}_{i}\).
Theorem 3.1
The disease-free steady state \(E_{0}\) is globally asymptotically stable when \(R_{0}\le 1\) and it becomes unstable when \(R_{0}>1\).
Proof
In order to prove the first part of this theorem, we define the following Lyapunov function
where \(H_{0}=s/\mu \). Differentiating \(L_{1}\) with respect to t along the solutions of the model (1), we obtain
Using the divergence theorem and homogeneous Neumann boundary conditions (3), we have \(\int _{\Omega }\Delta D(x,t)dx=0\) and \(\int _{\Omega }\Delta V(x,t)dx=0\) [34]. Therefore,
Hence, \(\frac{dL_{1}}{dt}\le 0\) if \(R_{0}\le 1\). Observe that \(\frac{dL_{1}}{dt}=0\) if and only if \(H=H_{0}=\frac{s}{\mu }\), \(I=0\), \(D=0\), \(V=0\), and \(Z=0\). It follows that if \(\mathcal {M}\) represents the largest compact invariant set in \(\{(H,I,D,V,Z)|\frac{dL_{1}}{dt}=0\}\), then \(\mathcal {M}=\{E_{0}\}=\{(\frac{s}{\mu },0,0,0,0)\}\). Thus, by the LaSalle’s invariance principle [27, 31], \(E_{0}\) is globally asymptotically stable when \(R_{0}\le 1\).
In order to prove the remaining part, we determine the characteristic equation about the disease-free steady state \(E_{0}\). The characteristic equation of the corresponding linearized system of model (1) about \(E_{0}\) is given by
From the equation (5), clearly we can see that \(\xi =-\mu (<0)\) and \(\xi =-\sigma (<0)\) are two roots of the characteristic equation (5). Let us consider
Other roots of the characteristic equation (5) are given by the solutions of \(f_{1}(\xi )=0\). Now, we have
Further, we obtain \(f_{1}(0)\mid _{i=1}=c\delta (\beta +\delta )(1-R_{0})<0\) when \(R_{0}>1\) and \(\lambda _{1}=0\). Consequently, there exists a positive real root of the characteristic equation (5) and hence, the disease-free steady state \(E_{0}\) is unstable whenever \(R_{0}>1\). This completes the proof. \(\square \)
Theorem 3.2
The immune-free steady state \(E_{1}\) is globally asymptotically stable when \(R_{CTL}\le 1<R_{0}\) and it becomes unstable when \(R_{CTL}>1\).
Proof
In order to prove the first part of this theorem, we define the following Lyapunov function
where \(\left( H_{1},I_{1},D_{1},V_{1},Z_{1}\right) \) denotes the immune-free steady state. Differentiating \(L_{2}\) with respect to t along the solutions of the model (1), we obtain
Note that \(\int _{\Omega }\Delta D(x,t)dx=0\), \(\int _{\Omega }\Delta V(x,t)dx=0\), \(\int _{\Omega }\frac{\Delta D(x,t)}{D(x,t)}dx=\int _{\Omega }\frac{\Vert \nabla D(x,t)\Vert ^{2}}{D^{2}(x,t)}dx\) and \(\int _{\Omega }\frac{\Delta V(x,t)}{V(x,t)}dx=\int _{\Omega }\frac{\Vert \nabla V(x,t)\Vert ^{2}}{V^{2}(x,t)}dx\) [28, 34]. Therefore, we have
Hence, we have \(\frac{dL_{2}}{dt}\le 0\) if \(R_{CTL}\le 1\). Observe that \(\frac{dL_{2}}{dt}=0\) if and only if \(H=H_{1}\), \(I=I_{1}\), \(D=D_{1}\), \(V=V_{1}\) and \(Z=Z_{1}=0\). Therefore, if \(\mathcal {M}\) represents the largest compact invariant set in \(\left\{ (H,I,D,V,Z)|\frac{dL_{2}}{dt}=0\right\} \) then \(\mathcal {M}=\{E_{1}\}\). Also since \(E_{1}\) exists whenever \(R_{0}>1\), then by the LaSalle’s invariance principle [27, 31] we deduce that \(E_{1}\) is globally asymptotically stable whenever \(R_{CTL}\le 1<R_{0}\).
In order to prove the remaining part, we determine the characteristic equation about the immune-free steady state \(E_{1}\). The characteristic equation of the corresponding linearized system of model (1) about \(E_{1}\) is given by
where
From the equation (6), clearly we can see that \(\xi =qI_{1}-\sigma =\frac{sq}{\delta R_{CTL}}(R_{CTL}-1)\) is a root of the characteristic equation (6). If \(R_{CTL}>1\), then \(\xi =qI_{1}-\sigma >0\) and hence, the characteristic equation (6) has a positive real root. Therefore, the immune-free steady state \(E_{1}\) is unstable whenever \(R_{CTL}>1\). This completes the proof. \(\square \)
Theorem 3.3
The interior steady state with CTL immune response \(E_{2}\) is globally asymptotically stable when \(R_{CTL}>1\).
Proof
We define the following Lyapunov function
where \(\left( H_{2},I_{2},D_{2},V_{2},Z_{2}\right) \) denotes the interior steady state with CTL immune response. Differentiating \(L_{3}\) with respect to t along the solutions of the model (1), we obtain
Hence, the inequality \(\frac{dL_{3}}{dt}\le 0\) holds always. Observe that \(\frac{dL_{3}}{dt}=0\) if and only if \(H=H_{2}\), \(I=I_{2}\), \(D=D_{2}\), \(V=V_{2}\) and \(Z=Z_{2}\). Therefore, \(\mathcal {M}=\{E_{2}\}\) where \(\mathcal {M}\) represents the largest compact invariant set in \(\left\{ (H,I,D,V,Z)|\frac{dL_{3}}{dt}=0\right\} \). Thus by using the LaSalle’s invariance principle [27, 31] we deduce that \(E_{2}\) is globally asymptotically stable whenever \(R_{CTL}>1\) as the steady state \(E_{2}\) exists whenever \(R_{CTL}>1\). This completes the proof. \(\square \)



Numerical Simulation
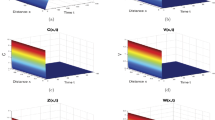
In this section, we carry out some numerical simulations to illustrate the theoretical results obtained in the previous section. For this purpose, we consider three sets of parameter values corresponding to the cases \(R_{0}<1\), \(R_{CTL}<1<R_{0}\) and \(R_{CTL}>1\). For the sake of simplicity of numerical simulations, we take one-dimensional spatial domain \(\Omega =[0,50]\) and the values of the diffusion coefficients as \(d_{D}=0.1~\text {mm}^{2}~\text {day}^{-1}\) and \(d_{V}=0.1~\text {mm}^{2}~\text {day}^{-1}\). Also, we consider the grid sizes as \(\Delta x=0.1\), \(\Delta t=0.1\) and delays as \(\tau _{1}=1~\text {day}\), \(\tau _{2}=2~\text {days}\). First we choose the following parameter values: \(s=2.6\times 10^{7}~\text {cells}~\text {ml}^{-1}~\text {day}^{-1}\), \(\mu =0.01~\text {day}^{-1}\), \(k=3\times 10^{-13}~\text {ml}~\text {virion}^{-1}~\text {day}^{-1}\), \(\delta =0.053~\text {day}^{-1}\), \(p=0.95~\text {ml}~\text {cell}^{-1}~\text {day}^{-1}\), \(a=150~\text {capsids}~\text {cell}^{-1}~\text {day}^{-1}\), \(\beta =0.87~\text {day}^{-1}\), \(c=3.8~\text {day}^{-1}\), \(q=0.12~\text {ml}~\text {cell}^{-1}~\text {day}^{-1}\) and \(\sigma =0.05~\text {day}^{-1}\) [17]. In this case, \(R_{0}=0.5476<1\) and it can be observed from Fig. 1 that all the corresponding populations converge towards the disease-free steady state \((2.6\times 10^{9},0,0,0,0)\) which eventually supports the Theorem 3.1. Biologically, this set of parameter values indicates that the disease will eventually die out and the infected individual will become completely cured. Next, we choose parameter values as \(k=1.67\times 10^{-12}~\text {ml}~\text {virion}^{-1}~\text {day}^{-1}\) [17], \(q=2\times 10^{-10}~\text {ml}~\text {cell}^{-1}~\text {day}^{-1}\), \(\sigma =0.45~\text {day}^{-1}\) and all other parameters are taken same as in the previous case. In this case, \(R_{CTL}=0.2035<1\) and \(R_{0}=3.0482>1\). For this set of parameter values, we can expect that all the populations will approach the immune-free steady state \((8.53\times 10^{8},3.3\times 10^{8},5.36\times 10^{10},1.23\times 10^{10},0)\) and this is evident from Fig. 2. In this case, the CTL immune response would not be triggered and the infection will eventually become chronic with associated severe consequences. Finally, we choose the parameter values as \(k=1.67\times 10^{-12}~\text {ml}~\text {virion}^{-1}~\text {day}^{-1}\), \(p=0.2~\text {ml}~\text {cell}^{-1}~\text {day}^{-1}\), \(q=0.2~\text {ml}~\text {cell}^{-1}~\text {day}^{-1}\), \(\sigma =0.45~\text {day}^{-1}\) and all other parameters are taken same as in the case \(R_{0}<1\). In this case, we have \(R_{CTL}=3.0482>1\) and we can expect that all the populations will approach the interior steady state with CTL immune response \((2.6\times 10^{9},2.25,365.66,83.72,0.54)\). This can be seen in Fig. 3. This set of parameter values demonstrates the scenario when the infection will activate the CTL immune response which in turn will diminish the viral load by blocking the infection process.
Conclusion
In this article, we proposed and investigated a delayed spatiotemporal HBV infection model with capsids and CTL immune response. We proved the existence and global asymptotic stability of the three spatially homogeneous steady states, namely, disease-free steady state \(E_{0}\), immune-free steady state \(E_{1}\) and endemic steady state \(E_{2}\). By using the direct Lyapunov method, we showed that the disease-free steady state \(E_{0}\) is globally asymptotically stable when \(R_{0}\le 1\), which indicates that the virions are cleared and eventually the disease dies out. When \(R_{CTL}\le 1<R_{0}\), the immune-free steady state \(E_{1}\) is globally asymptotically stable, which points out that immune response would not be activated and the infection becomes chronic. Further, the interior steady state with CTL immune response \(E_{2}\) is globally asymptotically stable when \(R_{CTL}>1\) and this indicates that CTL immune response will be activated only when the immune response reproduction number is greater than unity. Therefore, the results obtained in this article indicate that the delays and diffusions together does not have any effect on the global dynamical behaviors of the HBV infection model presented in [17]. Finally, several numerical illustrations are provided to validate our theoretical findings.
However, how to present a dynamically consistent non-standard finite difference scheme for this continuous model is our future work. Also, we want to extend this model by incorporating antibody immune response and examine it for the dynamical behaviors in near future.
References
Ciupe, S.M., Ribeiro, R.M., Nelson, P.W., Perelson, A.S.: Modeling the mechanisms of acute hepatitis B virus infection. J. Theor. Biol. 247(1), 23–35 (2007)
Ribeiro, R.M., Lo, A., Perelson, A.S.: Dynamics of hepatitis B virus infection. Microbes Infect. 4(8), 829–835 (2002)
Lewin, S., Walters, T., Locarnini, S.: Hepatitis B treatment: rational combination chemotherapy based on viral kinetic and animal model studies. Antivir. Res. 55(3), 381–396 (2002)
Nowak, M.A., Bonhoeffer, S., Hill, A.M., Boehme, R., Thomas, H.C., McDade, H.: Viral dynamics in hepatitis B virus infection. Proc. Natl. Acad. Sci USA 93(9), 4398–4402 (1996)
Nowak, M.A., Bangham, C.R.M.: Population dynamics of immune responses to persistent viruses. Science 272(5258), 74–79 (1996)
Min, L., Su, Y., Kuang, Y.: Mathematical analysis of a basic virus infection model with application to HBV infection. Rocky Mt. J. Math. 38(5), 1573–1585 (2008)
Wang, K., Fan, A., Torres, A.: Global properties of an improved hepatitis B virus model. Nonlinear Anal. Real World Appl. 11(4), 3131–3138 (2010)
Hews, S., Eikenberry, S., Nagy, J.D., Kuang, Y.: Rich dynamics of a hepatitis B viral infection model with logistic hepatocyte growth. J. Math. Biol. 60(4), 573–590 (2010)
Li, J., Wang, K., Yang, Y.: Dynamical behaviors of an HBV infection model with logistic hepatocyte growth. Math. Comput. Model. 54(1–2), 704–711 (2011)
Manna, K., Chakrabarty, S.P.: Chronic hepatitis B infection and HBV DNA-containing capsids: modeling and analysis. Commun. Nonlinear Sci. Numer. Simul. 22(1–3), 383–395 (2015)
Herz, A.V.M., Bonhoeffer, S., Anderson, R.M., May, R.M., Nowak, M.A.: Viral dynamics in vivo: limitations on estimates of intracellular delay and virus decay. Proc. Natl. Acad. Sci USA 93(14), 7247–7251 (1996)
Gourley, S.A., Kuang, Y., Nagy, J.D.: Dynamics of a delay differential equation model of hepatitis B virus infection. J. Biol. Dyn. 2(2), 140–153 (2008)
Eikenberry, S., Hews, S., Nagy, J.D., Kuang, Y.: The dynamics of a delay model of hepatitis B virus infection with logistic hepatocyte growth. Math. Biosci. Eng. 6(2), 283–299 (2009)
Manna, K., Chakrabarty, S.P.: Global stability of one and two discrete delay models for chronic hepatitis B infection with HBV DNA-containing capsids. Comput. Appl. Math. 36(1), 525–536 (2017)
Pang, J., Cui, J., Hui, J.: The importance of immune responses in a model of hepatitis B virus. Nonlinear Dyn. 67(1), 723–734 (2012)
Wang, J., Tian, X.: Global stability of a delay differential equation of hepatitis B virus infection with immune response. Electron. J. Differ. Equ. 94, 1–11 (2013)
Manna, K.: Global properties of a HBV infection model with HBV DNA-containing capsids and CTL immune response. Int. J. Appl. Comput. Math. 3(3), 2323–2338 (2017)
Britton, N.F.: Essential Mathematical Biology. Springer, London (2003)
Funk, G.A., Jansen, V.A.A., Bonhoeffer, S., Killingback, T.: Spatial models of virus-immune dynamics. J. Theor. Biol. 233(2), 221–236 (2005)
Wang, K., Wang, W.: Propagation of HBV with spatial dependence. Math. Biosci. 210(1), 78–95 (2007)
Wang, K., Wang, W., Song, S.: Dynamics of an HBV model with diffusion and delay. J. Theor. Biol. 253(1), 36–44 (2008)
Gan, Q., Xu, R., Yang, P., Wu, Z.: Travelling waves of a hepatitis B virus infection model with spatial diffusion and time delay. IMA J. Appl. Math. 75(3), 392–417 (2010)
Xu, R., Ma, Z.: An HBV model with diffusion and time delay. J. Theor. Biol. 257(3), 499–509 (2009)
Chí NC, Vales EÁ, Almeida GG (2012), Analysis of a HBV model with diffusion and time delay. J. Appl. Math. Article ID 578561, 25 pages
Zhang, Y., Xu, Z.: Dynamics of a diffusive HBV model with delayed Beddington-DeAngelis response. Nonlinear Anal. Real World Appl. 15, 118–139 (2014)
Hattaf, K., Yousfi, N.: Global dynamics of a delay reaction-diffusion model for viral infection with specific functional response. Comput. Appl. Math. 34(3), 807–818 (2015)
Hattaf, K., Yousfi, N.: A generalized HBV model with diffusion and two delays. Comput. Math. Appl. 69(1), 31–40 (2015)
Hattaf, K., Yousfi, N.: Global stability for reaction-diffusion equations in biology. Comput. Math. Appl. 66(8), 1488–1497 (2013)
Shaoli, W., Xinlong, F., Yinnian, H.: Global asymptotical properties for a diffused HBV infection model with CTL immune response and nonlinear incidence. Acta Math. Sci. 31(5), 1959–1967 (2011)
Manna, K., Chakrabarty, S.P.: Global stability and a non-standard finite difference scheme for a diffusion driven HBV model with capsids. J. Differ. Equ. Appl. 21(10), 918–933 (2015)
Manna, K.: Dynamics of a diffusion-driven HBV infection model with capsids and time delay. Int. J. Biomath. 10(5), 1750062 (2017)
Xu, J., Geng, Y., Hou, J.: A non-standard finite difference scheme for a delayed and diffusive viral infection model with general nonlinear incidence rate. Comput. Math. Appl. 74(8), 1782–1798 (2017)
Wang, S., Zhang, J., Xu, F., Song, X.: Dynamics of virus infection models with density-dependent diffusion. Comput. Math. Appl. 74(10), 2403–2422 (2017)
Kang, C., Miao, H., Chen, X., Xu, J., Huang, D.: Global stability of a diffusive and delayed virus dynamics model with Crowley-Martin incidence function and CTL immune response. Adv. Differ. Equ. (2017). https://doi.org/10.1186/s13662-017-1332-x
Miao, H., Teng, Z., Abdurahman, X., Li, Z.: Global stability of a diffusive and delayed virus infection model with general incidence function and adaptive immune response. Comput. Appl. Math. (2017). https://doi.org/10.1007/s40314-017-0543-9
Geng, Y., Xu, J., Hou, J.: Discretization and dynamic consistency of a delayed and diffusive viral infection model. Applied Mathematics and Computation 316, 282–295 (2018)
Evans, L.C.: Partial Differential Equations. American Mathematical Society, Rhode Island (1998)
Protter, M.H., Weinberger, H.F.: Maximum Principles in Differential Equations. Prentice Hall, Englewood Cliffs (1967)
Henry, D.: Geometric Theory of Semilinear Parabolic Equations. Lecture Notes in Mathematics, vol. 840. Springer-Verlag, Berlin, New York (1981)
Acknowledgements
I gratefully acknowledge the financial support provided by Science and Engineering Research Board, Government of India for pursuing my post-doctoral research. I convey my gratitude to the learned reviewers for their valuable comments and suggestions.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Manna, K. Dynamics of a Delayed Diffusive HBV Infection Model with Capsids and CTL Immune Response. Int. J. Appl. Comput. Math 4, 116 (2018). https://doi.org/10.1007/s40819-018-0552-4
Published:
DOI: https://doi.org/10.1007/s40819-018-0552-4