
Abstract
In this work we use a decomposition method which is called differential transform method (DTM) to obtain the numerical or analytical solutions of fuzzy differential equations. The DTM has been applied to many nonlinear differential equations of integer order as well as fractional orders. Here by considering strongly generalized differentiable of fuzzy differential equations we obtain all possible solution of given equations by DTM. Two examples are presented to show the capacity of this method.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
During last few decades fuzzy differential equations (FDEs) has a tremendous use in science and engineering. The concept of the fuzzy calculus was introduced by Chang and Zadeh [7] and then Dubois and Prade followed up it [10]. Other methods have been studied by Goetschel and Voxman [11], and Puri and Ralescu [20]. Concept of the FDEs applied in the fuzzy dynamical problems by Kandel and Byatt [16, 17]. The Cauchy problem and FDE were rigorously discussed by He and Yi [12], Kaleva [14, 15], Kloeden [18], Menda [19], Seikkala [21], and by other researchers (see [3,4,5,6, 8, 9, 13]). Allahviranloo et al. used numerical methods to solve FDEs [1, 2].
In this work, the differential transform method (DTM) is used to obtain analytical and approximate solution of FDEs. The paper is arranged as follows.
In “Differential Transformation Method” section, we give a brief review of the differential transform method for solving FDEs. Then the mentioned method is applied to two examples in “Numerical Examples” section. Finally, some conclusions are summarized in “Conclusion” section.
Differential Transformation Method
Definition 2.1
Let x(t, r) in the time domain T is strongly generalized differentiable of order n then if x is (i)-differentiable,
and if x is (ii)-differentiable,
Here \( ~\overline{\mathcal {X}}(n,r) \,\, and \,\, \underline{\mathcal {X}}(n, r)~ \) are named the upper and the lower spectrum of x(t, r) respectively in the domain N at \( t = t_{i}\) . So, for (i)-differentiable x, we can write x(t, r) as
or for (ii)-differentiable f, we can represent x(t, r) as
The inverse transform of X(n) can be obtained as above set of equations. If X(n) is described as
or
Then the function x(t, r) can be written as
or
where \(p(t) > 0\) and \(M(n) > 0\). Here p(t) is considered as a kernel corresponding to x(t, r) and M(n) is known the weighting factor. In this article, we apply the \(p(t) = 1\) and \(M(n)=\dfrac{H^{n}}{n!}\), Here H is the time horizon of interest. If f is (i)-differentiable, then
If f is (ii)-differentiable, then
If n is even, then \( \vartheta \) is considered as in the first form (i). Using the DTM, a differential equation can be transformed into an algebraic equation in the domain n. Also x(t, r) can be shown as the finite-term Taylor series plus a remainder, as
or
Definition 2.2
The transformation of the nth derivative and the inverse transformation of a function can be defined as follows, respectively.
From definition (2.1), it can be easily shown that the transformation function has basic mathematical operations as Table 1.
Numerical Examples
In this section, we solve few examples by the DTM.
Example 3.1
Consider the following second-order nonlinear FDE
To use the DTM, first we rewrite Eq. (1) in the following form:
The related initial conditions should be also transformed as follows:
with substituting Eq. (2) into (2) and by recursive method, we have:
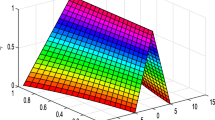
Some solutions with \(r = 0,0.05,0.1,\ldots ,0.95,1\) and \(x=1\) are shown in the Table 2.
Figure 1 is given to illustrate obtained solutions in the Table 2.

Obtained solutions in the Table 2
and
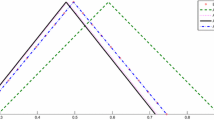
Some solutions with \(r = 0,0.05,0.1,\ldots ,0.95,1\) and \(x=1\) are shown in the Table 3.
Figure 2 is given to illustrate obtained solutions in the Table 3.

Obtained solutions in the Table 3
Example 3.2
Consider the second-order nonlinear FDE
To apply the DTM, first we rewrite Eq. (3) in the following form:
The related initial conditions should be also transformed as follows:
with substituting Eq. (5) into (4) and by recursive method, we have:
Some solutions with \(r = 0,0.05,0.1,\ldots ,0.95,1\) and \(x=1\) are shown in the Table 4. Figure 3 is given to illustrate obtained solutions in the Table 4.

Obtained solutions in the Table 4
and
Some solutions with \(r = 0,0.05,0.1,\ldots ,0.95,1\) and \(x=1\) are shown in the Table 5.
Figure 4 is given to illustrate obtained solutions in the Table 5.

Obtained solutions in the Table 5
Conclusion
In this paper, the differential transform method has been utilized to obtain solution of nonlinear fuzzy differential equations with initial conditions. It has shown that the DTM is a useful mathematical method for solving nonlinear FDEs. Two examples were used to illustrate the efficiency of this technique.
References
Abbasbandy, S., Allahviranloo, T.: Numerical solutions of fuzzy differential equations by Taylor method. Comput. Methods Appl. Math. 2, 113–124 (2002)
Allahviranloo, T., Ahmady, N., Ahmady, E.: Numerical solution of fuzzy differential equations by predictor–corrector method. Inf. Sci. 177(7), 1633–1647 (2007)
Bede, B., Rudas, I.J., Bencsik, A.L.: First order linear fuzzy differential equations under generalized differentiability. Inf. Sci. 177, 1648–1662 (2007)
Buckley, J.J.: Simulating Continuous Fuzzy Systems. Springer, Berlin (2006)
Buckley, J.J., Feuring, T.: Introduction to fuzzy partial differential equations. Fuzzy Sets Syst. 105, 241–248 (1999)
Buckley, J.J., Feuring, T.: Fuzzy differential equations. Fuzzy Sets Syst. 110, 43–54 (2000)
Chang, S.L., Zadeh, L.A.: On fuzzy mapping and control. IEEE Trans. Syst. Man Cybern. 2, 330–340 (1972)
Congxin, W., Shiji, S.: Existence theorem to the Cauchy problem of fuzzy differential equations under compactness-type conditions. Inf. Sci. 108, 123–134 (1998)
Ding, Z., Ma, M., Kandel, A.: Existence of the solutions of fuzzy differential equations with parameters. Inf. Sci. 99, 205–217 (1997)
Dubois, D., prade, H.: Towards fuzzy differential calculus: part 3, differentiation. Fuzzy Sets Syst. 8, 225–233 (1982)
Goetschel, R., Voxman, W.: Elementary fuzzy calculus. Fuzzy Sets Syst. 18, 31–43 (1986)
He, O., Yi, W.: On fuzzy differential equations. Fuzzy Sets Syst. 24, 321–325 (1989)
Jowers, L.J., Buckley, J.J., Reilly, K.D.: Simulating continuous fuzzy systems. Inf. Sci. 177, 436–448 (2007)
Kaleva, O.: Fuzzy differential equations. Fuzzy Sets Syst. 24, 301–317 (1987)
Kaleva, O.: The Cauchy problem for fuzzy differential equations. Fuzzy Sets Syst. 35, 389–396 (1990)
Kandel, A.: Fuzzy dynamical systems and the nature of their solutions. In: Wang, P.P., Chang, S.K. (eds.) Fuzzy Sets Theory and Application to Policy Analysis and Information Systems, pp. 93–122. Plenum Press, New York (1980)
Kandel, A., Byatt, W.J.: Fuzzy differential equations. In: Proceedings of the International Conference on Cybernetics and Society, Tokyo, November, pp. 1213–1216 (1978)
Kloeden, P.: Remarks on peano-like theorems for fuzzy differential equations. Fuzzy Sets Syst. 44, 161–164 (1991)
Menda, W.: Linear fuzzy differential equation systems on R1. J. Fuzzy Syst. Math. 2, 51–56 (1988) (in Chinese)
Park, J.Y., Kwan, Y.C., Jeong, J.V.: Existence of solutions of fuzzy integral equations in Banaeh spaces. Fuzzy Sets Syst. 72, 373–378 (1995)
Seikkala, S.: On the fuzzy initial value problem. Fuzzy Sets Syst. 24, 319–330 (1987)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Kadkhoda, N., Roushan, S.S. & Jafari, H. Differential Transform Method: A Tool for Solving Fuzzy Differential Equations. Int. J. Appl. Comput. Math 4, 33 (2018). https://doi.org/10.1007/s40819-017-0471-9
Published:
DOI: https://doi.org/10.1007/s40819-017-0471-9