
Abstract
Fuzzy logic control, due to its simple control structure, easy and cost-effective design, has been successfully employed to the application of guidance and control in robotic fields. This paper aims to review fuzzy-logic-based guidance and control in an important branch of robots—marine robotic vehicles. First, guidance and motion forms including the maneuvering, path following, trajectory tracking, and position stabilization are described. Subsequently, the application of three major classes of fuzzy logic control, including the conventional fuzzy control (Mamdani fuzzy control and Takagi–Sugeno–Kang fuzzy control), adaptive fuzzy control (self-tuning fuzzy control and direct/indirect adaptive fuzzy control), and hybrid fuzzy control (fuzzy PID control, fuzzy sliding mode control, and neuro-fuzzy control) are presented. In particular, we summarize the design and analysis process of direct/indirect adaptive fuzzy control and fuzzy PID control in marine robotic fields. In addition, two comparative results between hybrid fuzzy control and the corresponding single control are provided to illustrate the superiority of hybrid fuzzy control. Finally, trends of the fuzzy future in marine robotic vehicles are concluded based on its state of the art.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the last years, a growing number of marine robotic vehicles including unmanned surface vehicles (USVs), autonomous underwater vehicles (AUVs), remotely operated vehicles (ROVs), and underwater gliders (UGs) have been developed for civil, military, and scientific research applications [7, 12, 78, 87, 101, 128, 162, 164, 170, 187, 195]. For instance, these vehicles prove their capabilities in three-dimensional reconstruction of seabed surface [197], automatic underwater sampling [175, 194, 217], detection and monitoring of marine gas seeps [6], subsea pipeline/cable tracking and inspection [3, 166, 171, 184], monitoring and assisting human divers [96], flow field mapping [13], and mine countermeasures [29].
For such vehicles to be capable of undertaking these missions, they require advanced, intelligent, reliable and adaptable modeling, planing, navigation, guidance, and control system [38, 40, 63, 79, 89, 98, 100, 143, 151, 159, 191,192,193, 200, 201, 212, 214]. As a result, various methods such as proportional–integral–derivative (PID) control [11, 41, 83, 188], feedback linearizing control [10], backstepping control [47, 72, 73, 80, 167, 174, 216], \({\mathcal {L}}_1\) [92], sliding mode control [25, 26, 111, 208], neural network control [24, 44, 105, 106, 108, 196, 209, 215], robust control [153], model predictive control [45], and fuzzy logic control [109, 149] are being widely applied to guidance and control of marine robotic vehicles.
Particularly, the fuzzy logic control based on fuzzy set theory by Zadeh exhibits excellent immunity to system nonlinearity and uncertainties [61, 145, 155, 190]. Based on the differences of fuzzy control rules and their generation methods, approaches to fuzzy logic control can be roughly classified into the following categories: (1) conventional fuzzy control (CFLC); (2) adaptive fuzzy control (AFLC); (3) hybrid fuzzy control including fuzzy PID control (FPIDC), fuzzy sliding mode control (FSMC), and neuro-fuzzy control (NFLC).
In this paper, we aim to survey state of the art of various fuzzy controllers for the guidance and control of marine robotic vehicles as well as the design and analysis. Hence, we hope to provide a valuable guide for learning guidance and control of marine robotic vehicles based on fuzzy logic control.
The rest of the paper is organized as follows. The guidance and control concept of marine robotic vehicles is defined in the next section. Various fuzzy logic controllers in guidance and control application are reviewed as well as the design and analysis in Sect. 3. In Sect. 4, the performance comparison between hybrid fuzzy control and other control is shown. Trends of the future of fuzzy-logic-based guidance and control in marine robotic vehicles are summarized in Sect. 5, while conclusions are included in Sect. 6.
2 Guidance and Control
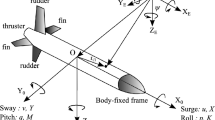
According to [38], the terms guidance and control are defined as: (1) Guidance is the action of determining the course, attitude, and speed of a marine robotic vehicle, relative to some reference frame; (2) Control is the development and application to a marine robotic vehicle of appropriate forces and moments for operating point control, tracking and stabilization, which is related to design the feedforward and feedback control laws. A guidance and control system for automatic weather routing of a ship is shown in Fig. 1.

Guidance and control system for automatic weather routing of ships
The control of marine robotic vehicles can be divided into single degree of freedom (1-DOF) maneuvering, point stabilization, path following, and trajectory tracking [31, 94, 174, 213], as shown in Fig. 2.

Basic control tasks for marine robotic vehicles: a maneuvering; b point stabilization; c path following; d trajectory tracking
1-DOF maneuvering, as shown in Fig. 2a: 1-DOF maneuvering includes zigzag maneuver, heading control, tuning motion, and roll stabilization.
Point stabilization, as shown in Fig. 2b: The point stabilization problem usually means that a vehicle is stabilized in a desired goal posture (position and orientation) from a given initial configuration.
Path following, as shown in Fig. 2c: In the path following task, the assigned Cartesian path is usually given in a parameterized form expressing the desired motion in terms of a path parameter, i.e., the arc length s along the path. A vehicle is required to follow this path with spatial convergence alone, without any temporal specification.
Trajectory tracking, as shown in Fig. 2d: In the trajectory tracking task, the vehicle must track a time-parameterized trajectory, i.e., a geometric path with an associated timing specification t. Hence, it inherently mixes the time and space assignments into one assignment.
Remark, Maneuvering trials are often performed to assess the path keeping and path changing ability of a marine robotic vehicle. Point stabilization task can often be achieved for a fully actuated marine robotic vehicle where the number of control inputs is the same as that of degrees of freedom. For path following, time dependence is not relevant because one is concerned only with the geometric displacement between the vehicle and the path. In this sense, the time evolution of the path parameter is usually free. Yet, the evolution of the trajectory parameter in trajectory tracking is time dependent [21, 30, 31, 39, 58, 66, 122, 154, 174, 205, 207].
3 Fuzzy Logic Application and Analysis
This section reviews the application of three kinds of fuzzy control in guidance and control of marine robotic vehicles.
3.1 Conventional Fuzzy Control (CFLC)
Generally, the CFLC can be divided in two types: Mamdani fuzzy control [95] and Takagi–Sugeno–Kang (TSK) fuzzy control [132], which need to deal with fuzzification, fuzzy inference, and defuzzification operations, as shown in Fig. 3. Here, the inputs of CFLC are usually composed of the error e and the error rate \(\dot{e}\) and the output can be directly given to the onboard actuator.

Basic structure of a CFLC system
3.1.1 Mamdani Fuzzy Control
In terms of guidance, the fuzzy logic system was used to generate a new safe heading angle, yaw rate, or rudder angle for an AUV in order to avoid obstacle [8, 9, 127]. It was also applied in a submarine to evade the attack from a torpedo [124]. Moreover, an outer-loop Mamdani fuzzy logic controller with triangular membership functions for the inputs and output was designed to generate the desired rudder angle of path following [42]. Besides its application for safe maneuvering and command guidance, the fuzzy comprehensive evaluation method was applied to evaluate the motion performance of an AUV, which can provide a valuable and scientific guide for layout scheme decision-making at the preliminary design stage [85].
Mamdani fuzzy control also plays an important role in motion control of marine robotic vehicles. A Mamdani fuzzy logic controller with triangular membership functions was designed for fixed and varying heading control of a tank [102, 147]. In [69], the Mamdani fuzzy control system was developed for classifying the transverse of terrain and performing pipeline following by a ROV. In addition to the above heading control and path following, a hierarchical closed-loop fuzzy control system was applied for horizontal-plane trajectory tracking of an under-actuated AUV [113]. The single Mamdani fuzzy logic controller was also used in horizontal-plane trajectory tracking of an USV [74] and vertical-plane trajectory tracking of an AUV [90, 117].
3.1.2 TSK Fuzzy Control
The difference is that unlike the Mamdani method, the output membership functions of the TSK method are only constants (singletons/zero-order) or have linear relationship (first-order) with respect to the input, which obviously simplifies the defuzzification process. In this sense, the TSK fuzzy control seems to be more popular in guidance and control fields of marine robotic vehicles.
The zero-order TSK fuzzy controller was designed for dynamic positioning [137], vertical-plane variable depth trajectory tracking [112, 118], and three-dimensional path following control [49, 182]. Actually, the zero-order TSK fuzzy control is a special case of the first-order TSK fuzzy control which is more general. For instance, the first-order TSK fuzzy logic was used to generate the desired heading angle in the underwater docking mission [135, 136]. Besides the guidance application, it was also applied to the heading, pitch and depth control of an AUV [123]. Compared with the above 1-DOF control, the first-order TSK fuzzy design for the coupled motion is relatively complicated, such as point stabilization of an AUV [15], vertical-plane trajectory tracking and path following of an AUV [64, 65]. Different form these two linear output functions, the yaw control of an AUV is based on a TSK fuzzy controller where the output of each rule is a nonlinear Gaussian function with respect to double inputs [130]. In [160], the nonlinear fuzzy output combined a smoothing function with a switch function.
Note that the above TSK fuzzy controller has two inputs. It implies that if the number of membership functions for each input is n, the number of fuzzy rules will be \(n^2\). Based on the following signed distance method
with \(\lambda \) being a constant slope and d being the signed distance, the single input fuzzy controller using d as its input was proposed in [22] and applied to the control of marine robotic vehicles, such as the heading control of a chemical ship tanker [60], vertical-plane trajectory tracking of an AUV [2, 56, 57], and three-dimensional (3D) path following [183]. As shown in [56], the number of rules of the single input fuzzy controller can be reduced from \(n^2\) to n and the computational time was reduced form 1500 to 10 \(\upmu {\hbox {s}}\).
In summary, the CFLC-based documents in guidance and control of marine robotic vehicles are listed in Table 1.
3.1.3 Stability Analysis
The stability of the Mamdani fuzzy system was rarely reported in the listed documents, while the stability of the TSK fuzzy system can be based on common quadratic Lyapunov functions, piecewise quadratic Lyapunov functions, or fuzzy Lyapunov functions. The authors can refer to [37] for the details and in this paper it is omitted.
3.2 Adaptive Fuzzy Control (AFLC)
Fuzzy control design is composed of three important stages, namely fuzzy rules, scaling factors, and membership functions. Generally, the CFLC has a fixed set of IF-THEN rules, usually derived from experts’ knowledge. The membership functions of the associated input and output linguistic variables are generally predefined on a common universe of discourse. For the successful design, the proper selection of input and output scaling factors is also important.
As we all known, the marine robotic vehicle is a nonlinear second-order system and often has system uncertainties including hydrodynamic modeling inaccuracy and unknown environmental disturbances. Hence, the CFLC with a fixed number of IF-THEN rules, fixed valued scaling factors and predefined membership functions may be not enough sufficient to get a satisfactory control performance. In this subsection, we list three kinds of AFLC: self-tuning fuzzy control, direct adaptive fuzzy control, and indirect adaptive fuzzy control.
3.2.1 Self-tuning Fuzzy Control (SFLC)
If a fuzzy logic controller has self-tuning membership functions, scaling factors, or fuzzy rules, it can be called SFLC. An adaptive fuzzy controller with self-tuning membership functions was proposed for the obstacle avoidance of an AUV [35]. To achieve better track-keeping performance in the presence of external disturbances, the scaling factors of a fuzzy controller for the ship autopilot were changed by an adjustable mechanism with the object distance and the heading angle as its inputs [139]. In [75], a learning control algorithm automatically generated the fuzzy controller’s knowledge base online as new information on how to control the ship, as shown in Fig. 4. However, the stability of the above SFLC was not analyzed.

Basic structure of self-tuning fuzzy control
3.2.2 Direct Adaptive Fuzzy Control (DAFLC)
Before introducing DAFLC, we should first review the fuzzy approximation theorem, which is the basis of DAFLC and the subsequent indirect adaptive fuzzy control (IAFLC).
For a real continuous function f(x) whose analytic expression is unknown, given a sufficiently large number N of fuzzy rules and any small tolerance \(\bar{\varepsilon }\), there exists an optimal output weight matrix \({\varvec{\varpi }}^*\) such that
and
with the minimal functional approximation error \(\varepsilon \) satisfying \(|\varepsilon |\le \bar{\varepsilon }\) [62, 146, 157].
DAFLC uses the fuzzy approximation theorem to estimate the optimal control laws dependent on accurate dynamics model. For instance, an optimal control law was first developed based on full-state feedback control. Then, the fuzzy approximation was used to estimate the unknown terms in the optimal control law for a fully actuated USV [134, 148]. The general framework is given as follows:
The kinematic and dynamic models of a marine robotic vehicle can be described in the following vectorial strict-feedback form
where \({\varvec{\eta }}\) denotes the position and orientation vector with coordinates in the earth-fixed inertial frame; \({\varvec{R}}\) is a transformation matrix which is related through the functions of the Euler angles \({\varvec{{\varOmega }}}\); \({\varvec{\upsilon }}\) denotes the linear and angular velocity vector with coordinates in the body-fixed frame; \({\varvec{M}}\) is the inertia matrix; \({\varvec{C}}\) is the matrix of Coriolis and centripetal terms; \({\varvec{D}}\) is the damping matrix; \({\varvec{g}}\) is the vector of gravitational forces and moments; \({\varvec{\tau }}\) is used to describe the forces and moments acting on the vehicle in the body-fixed frame; and \({\varvec{d}}\) denotes the environmental disturbances in the body-fixed frame.
Assume that the desired position and orientation vector is \({\varvec{\eta }}_d\). Define error variables \({\varvec{z}}_1={\varvec{\eta }}-{\varvec{\eta }}_d\) and \({\varvec{z}}_2={\varvec{\upsilon }}-{\varvec{\alpha }}_1\) where \({\varvec{\alpha }}_1\) is a virtual velocity vector. The first step is to consider the Lyapunov function candidate \(V_1=0.5{\varvec{z}}_1^T{\varvec{z}}_1\) and then differentiating \(V_1\) yields the virtual control law \({\varvec{\alpha }}_1={\varvec{R}}({\varvec{{\varOmega }}})^T(\dot{{\varvec{\eta }}}_d-{\varvec{K}}_1{\varvec{z}}_1)\) where \({\varvec{K}}_1\) is a diagonal matrix. The second step is to choose the Lyapunov function candidate \(V_2=V_1\,+\,0.5{\varvec{z}}_2^T{\varvec{M}}{\varvec{z}}_2\) to obtain the optimal control law
where \({\varvec{K}}_2\) is also a diagonal matrix.
However, since \({\varvec{M}}, {\varvec{C}}({\varvec{\upsilon }}), {\varvec{D}}({\varvec{\upsilon }}), {\varvec{g}}({\varvec{\eta }}), {\varvec{d}}\) are difficult to measure precisely and usually all unknown or part known, the model-based optimal control law is not feasible [150, 152]. To overcome this difficulty, the fuzzy approximation can be used to approximate the unknown terms:
Combining the control framework in (5) with the fuzzy approximation of unknown dynamics, the final direct adaptive fuzzy controller can be designed as
where the updated law of \(\widehat{\varvec{\varpi }}\) can be resorted to [134, 148]. The same is that tracking errors are proven to be uniformly ultimately bounded due to the existence of the approximation error \(\varepsilon \).
3.2.3 Indirect Adaptive Fuzzy Control (IAFLC)
Different from the DAFLC, the IAFLC uses the fuzzy approximation to estimate the unknown dynamics model. In [4, 179], adaptive fuzzy control was used to approximate the nonlinear unknown terms in order to achieve the Lyapunov stability of the ship roll stabilization system. It was also used to approximate unknown function in the ship steering systems [114, 180]. In addition, the IAFLC identified the unknown nonlinear parts of the vertical-plane dynamic model of a submarine [115].
In summary, the AFLC used in guidance and control of marine robotic vehicles is listed in Table 2.
3.3 Hybrid Control Combining Fuzzy Control with Other Algorithms
In this subsection, we will present several kinds of hybrid control combining fuzzy control with other algorithms, which can generate a better behavior than either of them.
3.3.1 Fuzzy PID Control (FPIDC)
It is well known that the conventional PID controller is the most widely adopted controller in industry, due to its simple structure, ease of design, and low cost in implementation [37]. Yet, the conventional PID controller might not perform satisfactorily if the system to be controlled is highly nonlinear, coupled, or uncertain. On the other hand, fuzzy control has been well known for its ability to reject nonlinearities and uncertainties by the use of fuzzy set theory. Hence, it can be believed that by integrating these two methods, a better control system called FPIDC can be designed.
Usually, an adaptive PID controller with self-tuning parameters adjusted by fuzzy control is designed to offer the robustness with respect to the system uncertainties, including inaccurate hydrodynamic parameters and time-varying environmental disturbances, such as longitudinal control [133], heading control [76, 93], variable depth tracking control [88], three-dimensional trajectory tracking [68], and three-dimensional path following [173]. Here, the most commonly used control law \(\tau _i\) in certain degree of freedom is
where the self-tuning parameters are updated by
with the initial control gains \(k_{p0},k_{i0},k_{d0}\) and the time-varying incremental gains \(\Delta k_{p},\Delta k_{i},\Delta k_{d}\).
In order to get the gains \(\Delta k_{p},\Delta k_{i},\Delta k_{d}\), a fuzzy logic controller is usually adopted. If the fuzzy linguistic variables are defined as NB, NM, NS, ZE, PS, PM, PB, the fuzzy rules for \(\Delta k_{p},\Delta k_{i},\Delta k_{d}\) can be listed in Tables 3, 4 and 5. For each table, the first column represents the different fuzzy subsets of the tracking error e, the first row represents the different fuzzy subsets of the tracking error ratio \(\dot{e}\), and the other cells in the table are outputs of IF-THEN rules in different cases. The subsequent defuzzification step can be achieved by the use of the center of area method.
3.3.2 Fuzzy Sliding Mode Control (FSMC)
As we all know, sliding mode control (SMC) is a robust approach to control a nonlinear system with internal and external uncertainties [28, 43, 138, 169]. Usually, a sliding mode surface is first defined, i.e.,
or
where \(k_1, k_2, k_3\) are control gains. Then, a switching function \(\sigma \text {sgn}(s)\) with a proper gain \(\sigma \) is necessary in the control law design. Yet, it often results in chattering phenomena due to its discontinuous switching function. Actually, the combination of fuzzy control and sliding mode control can weaken the chattering phenomena and realize the advantages of both techniques. For instance, the fuzzy logic is used to adjust the gain (i.e., \(\sigma \)) of the sliding mode switching part in order to suppress chattering. This kind of applications can be seen in roll stabilization [17], heading control [34], and depth tracking control [110].
On the one hand, fuzzy logic control is also used to approximate the system modeling based on the fuzzy approximation and then sliding mode control rejects the rest uncertainty, such as heading control [119, 189], depth control [186], trajectory tracking [5, 71, 149], and path following [48, 67, 81, 82, 158].
3.3.3 Neuro-Fuzzy Control (NFLC)
Since neural network control has strong learning capabilities and high computation efficiency in parallel implementation [27, 46, 50, 52, 99, 104, 120, 142, 156, 172, 177, 178, 203] and fuzzy control has a powerful framework for expert knowledge representation, the combination of these two methods has attracted lots of attention from control community. A typical combination is the so-called NFLC, which is basically a fuzzy control augmented by neural networks to enhance its characteristics like flexibility, data processing capability, and adaptability [37, 51, 51, 55].
In general, the NFLC has three kinds of control frameworks, as shown in Fig. 5. The first one is the linear superposition of them in Fig. 5a. For instance, a fuzzy PD control plus neural network control was designed for an underwater vehicle-manipulator system [176]. The second one is fuzzy control adjusted by neural network control shown in Fig. 5b. For instance, artificial neural network was used to tune the consequent portion of the fuzzy conditional statements [131]. A neuro-fuzzy system was used to reform the membership functions and rules of a collision avoidance system [1]. The weight of NFLC in path following task of the ODIN AUV was adjusted online to minimize the error function by using a simplified learning and retrieving procedure [70]. The third one is the complete integration of them shown in Fig. 5c. A typical example is that the NFLC was used to model the inverse dynamics of the ODIN AUV and the feedback-error-learning method or other method online tuned the parameters of the recurrent neuro-fuzzy controller [77, 144]. Similarly, the unknown dynamic function in trajectory tracking, heading control, and dynamic positioning was identified by the NFLC [23, 84, 97, 165]. In addition, the NFLC was introduced to approximate a backstepping control law [86].

Basic structure of NFLC
3.3.4 Other Hybrid Fuzzy Control
In addition to the aforementioned FPIDC, FSMC, and NFLC, there are other algorithms combined with fuzzy control, such as parallel distributed compensation [14, 16, 53], genetic algorithm [36, 54, 59], \(H_\infty \) [116], and particle swarm optimization [198]. In summary, the hybrid fuzzy control used in guidance and control of marine robotic vehicles is listed in Table 6.
4 Comparative Results
In this section, we will give two simulation comparisons between the fuzzy-logic-based hybrid controller and the corresponding single controller. In the authors’ opinion, the comparison of CFLC/AFLC and the other control (i.e., backstepping, neural network) seems not to be very equitable because the performance also depends on the design of control systems and the choice of control gains. From the simulated results, it can be concluded that the fuzzy-logic-based hybrid controller can perform better than the corresponding single controller, which is due to making full use of advantages of fuzzy logic in the hybrid control.
4.1 FPIDC Versus PID
In the first simulation, the algorithms of FPIDC and PID are taken from [173]. All the parameters of the whole simulated system are the same as it. Here, we give the following paths and errors under two different controllers, as shown in Figs. 6 and 7, respectively. Note that the external environmental disturbances and model uncertainties simultaneously act on the AUV from 160 to 350s. Obviously, the added fuzzy logic control makes the following process smoother and the robustness against disturbances stronger.

3D Tanh path following under FPIDC and PID

Path following errors under FPIDC and PID
4.2 FSMC Versus SMC
In the second simulation, the algorithms of FSMC and SMC are taken from [181]. All the parameters of the whole simulated system are also the same as it. Here, we give the following paths and control inputs under two different controllers, as shown in Figs. 8 and 9, respectively. Although there seems to be no difference between the two actual following paths, the control inputs under FSMC are smoother than those of SMC, which illustrates that the added fuzzy logic control suppresses the inherent chattering of the conventional SMC.

2D Path following under FSMC and SMC

Control inputs under FSMC and SMC
5 Trends for the Future
Based on state of the art of fuzzy logic application in marine robotic vehicles, it can be concluded that more attention should be paid to the following aspects:
The first one is the fuzzy application for new control scenarios, such as motion control with thruster fault [129, 161, 163, 210], motion control with input saturation [121, 126, 141, 185, 206, 209, 211], and formation control of multiple vehicles [18,19,20, 32, 33, 91, 103, 107, 125, 140, 168, 202]. The above topics are hotspots of present control fields in marine robotic vehicles, and it is expected that the fuzzy logic theory will play a greater role due to its simple control structure, easy and cost-effective design.
The second one is the fuzzy generalization in a guidance layer. Fuzzy logic control has shown the outperformance in various control scenarios. Yet, the guidance behavior is usually the basis of motion control, especially for an under-actuated marine robotic vehicle. Hence, we believe the fuzzy logic method will be also more applied to the guidance loop of marine robotic vehicles because most of existing marine robotic vehicles are under-actuated.
The third one is the design and analysis of fuzzy logic system itself. From Sect. 3, the design of most fuzzy logic controllers is coupled with other algorithms, i.e., PID. Yet, how to analyze the stability of FPIDC seems a difficult problem. Maybe the switching theory should be introduced.
The fourth one is the implementation of fuzzy-logic-based guidance and control in actual onboard system of marine robotic vehicles. It can be found that most of published papers presented simulation results except for [8, 48, 85, 119, 136, 199, 204]. Hence, the future work should focus on the application of various advanced adaptive fuzzy controllers in field tests.
6 Conclusion
In this paper, we review three major classes of fuzzy logic control, including CFLC, AFLC, and HFLC used in the marine robotic field. Due to its simple control structure, easy and cost-effective design, it can be seen that they are widely used in guidance and control of marine robotic fields, especially in control field. Subsequently, two comparative results between fuzzy-logic-based hybrid control and the corresponding single control are given to illustrate the superiority of fuzzy-logic-based hybrid control. Besides the review, trends of the fuzzy future in marine robotic vehicles are summarized, which can provide some potential research topics for the readers.
References
Ahn, J.H., Rhee, K.P., You, Y.J.: A study on the collision avoidance of a ship using neural networks and fuzzy logic. Appl. Ocean Res. 37, 162–173 (2012)
Amjad, M., Ishaque, K., Abdullah, S., Salam, Z.: An alternative approach to design a fuzzy logic controller for an autonomous underwater vehicle. In: Proceedings of the IEEE Conference on Cybernetics and Intelligent Systems (CIS), pp. 195–200 (2010)
Asakawa, K., Kojima, J., Kato, Y., Matsumoto, S., Kato, N., Asai, T., Iso, T.: Design concept and experimental results of the autonomous underwater vehicle aqua explorer 2 for the inspection of underwater cables. Adv. Robot. 16(1), 27–42 (2002)
Bai, R.: Adaptive fuzzy output-feedback method applied to fin control for time-delay ship roll stabilization. Math. Probl. Eng. 2014, 791,932 (2014)
Bessa, W.M., Dutra, M.S., Kreuzer, E.: Depth control of remotely operated underwater vehicles using an adaptive fuzzy sliding mode controller. Robot. Auton. Syst. 56(8), 670–677 (2008)
Blomberg, A.E.A., Sæbø, T.O., Hansen, R.E., Pedersen, R.B., Austeng, A.: Automatic detection of marine gas seeps using an interferometric sidescan sonar. IEEE J. Ocean. Eng. 42(3), 590–602 (2017)
Bovio, E., Cecchi, D., Baralli, F.: Autonomous underwater vehicles for scientific and naval operations. Annu. Rev. Control 30(2), 117–130 (2006)
Braginsky, B., Guterman, H.: Obstacle avoidance approaches for autonomous underwater vehicle: simulation and experimental results. IEEE J. Ocean. Eng. 41(4), 882–892 (2016)
Bui, L.D., Kim, Y.G.: An obstacle-avoidance technique for autonomous underwater vehicles based on BK-products of fuzzy relation. Fuzzy Sets Syst. 157(4), 560–577 (2006)
Caharija, W., Pettersen, K.Y., Bibuli, M., Calado, P., Zereik, E., Braga, J., Gravdahl, J.T., Sørensen, A.J., Milovanović, M., Bruzzone, G.: Integral line-of-sight guidance and control of underactuated marine vehicles: theory, simulations, and experiments. IEEE Trans. Control Syst. Technol. 24(5), 1623–1642 (2016)
Campos, E., Chemori, A., Creuze, V., Torres, J., Lozano, R.: Saturation based nonlinear depth and yaw control of underwater vehicles with stability analysis and real-time experiments. Mechatronics 45, 49–59 (2017)
Capocci, R., Dooly, G., Omerdić, E., Coleman, J., Newe, T., Toal, D.: Inspection-class remotely operated vehicles—a review. J. Mar. Sci. Eng. 5(1), 13 (2017)
Chang, D., Wu, W., Edwards, C.R., Zhang, F.: Motion tomography: mapping flow fields using autonomous underwater vehicles. Int. J. Robot. Res. 36(3), 320–336 (2017)
Chang, W., Liang, H., Ku, C.: Fuzzy controller design subject to actuator saturation for dynamic ship positioning systems with multiplicative noises. Proc. Inst. Mech. Eng. I J. Syst. Control Eng. 224(6), 725–736 (2010)
Chang, W.J., Chang, W., Liu, H.H.: Model-based fuzzy modeling and control for autonomous underwater vehicles in the horizontal plane. J. Mar. Sci. Technol. 11(3), 155–163 (2003)
Chang, W.J., Chen, M.W., Ku, C.C.: Passive fuzzy controller design for discrete ship steering systems via takagi-sugeno fuzzy model with multiplicative noises. J. Mar. Sci. Technol. 21(2), 159–165 (2013)
Chen, S., Hsu, W.: Fuzzy sliding mode control for ship roll stabilization. Asian J. Control 5(2), 187–194 (2003)
Chen, Y.Y., Tian, Y.P.: Formation tracking and attitude synchronization control of underactuated ships along closed orbits. Int. J. Robust Nonlinear Control 25(16), 3023–3044 (2015)
Chen, Y.Y., Wang, Z.Z., Zhang, Y., Liu, C.L., Wang, Q.: A geometric extension design for spherical formation tracking control of second-order agents in unknown spatiotemporal flowfields. Nonlinear Dyn. 88(2), 1173–1186 (2017)
Chen, Y.Y., Zhang, Y., Liu, C.L., Wei, P.: Coordinated orbit-tracking control of second-order non-linear agents with directed communication topologies. Int. J. Syst. Sci. 47(16), 3929–3939 (2016)
Chen, Y.Y., Zhang, Y., Wang, Z.Z.: An adaptive backstepping design for formation tracking motion in an unknown eulerian specification flowfield. J. Frankl. Inst. 354(14), 6217–6233 (2017)
Choi, B.J., Kwak, S.W., Kim, B.K.: Design and stability analysis of single-input fuzzy logic controller. IEEE Trans. Syst. Man Cybern. B (Cybernetics) 30(2), 303–309 (2000)
Chu, Z., Xiang, X., Zhu, D., Luo, C., Xie, D.: Adaptive fuzzy sliding mode diving control for autonomous underwater vehicle with input constraint. Int. J. Fuzzy Syst. (2017). doi:10.1007/s40815-017-0390-2
Chu, Z., Zhu, D., Yang, S.X.: Observer-based adaptive neural network trajectory tracking control for remotely operated vehicle. IEEE Trans. Neural Netw. Learn. Syst. 28(7), 1633–1645 (2017)
Chu, Z., Zhu, D., Jan, G.E.: Observer-based adaptive neural network control for a class of remotely operated vehicles. Ocean Eng. 127, 82–89 (2016)
Cui, R., Chen, L., Yang, C., Chen, M.: Extended state observer-based integral sliding mode control for an underwater robot with unknown disturbances and uncertain nonlinearities. IEEE Trans. Industr. Electron. 64(8), 6785–6795 (2017)
Cui, R., Yang, C., Li, Y., Sharma, S.: Adaptive neural network control of auvs with control input nonlinearities using reinforcement learning. IEEE Trans. Syst. Man Cybern. Syst. 47(6), 1019–1029 (2017)
Cui, R., Zhang, X., Cui, D.: Adaptive sliding-mode attitude control for autonomous underwater vehicles with input nonlinearities. Ocean Eng. 123, 45–54 (2016)
Djapic, V., Nad, D.: Collaborative autonomous vehicle use in mine countermeasures. Sea Technol. 51(10), 19–23 (2010)
Do, K.D.: Global path-following control of underactuated ships under deterministic and stochastic sea loads. Robotica 34(11), 2566–2591 (2016)
Do, K.D., Pan, J.: Control of Ships and Underwater Vehicles: Design for Underactuated and Nonlinear Marine Systems. Springer, Berlin (2009)
Dong, X., Yu, B., Shi, Z., Zhong, Y.: Time-varying formation control for unmanned aerial vehicles: theories and applications. IEEE Trans. Control Syst. Technol. 23(1), 340–348 (2015)
Dong, X., Zhou, Y., Ren, Z., Zhong, Y.: Time-varying formation control for unmanned aerial vehicles with switching interaction topologies. Control Eng. Pract. 46, 26–36 (2016)
Ejaz, M., Chen, M.: Sliding mode control design of a ship steering autopilot with input saturation. Int. J. Adv. Rob. Syst. 14(3), 1–13 (2017)
Fang, M.C., Wang, S.M., Mu-Chen, W., Lin, Y.H.: Applying the self-tuning fuzzy control with the image detection technique on the obstacle-avoidance for autonomous underwater vehicles. Ocean Eng. 93, 11–24 (2015)
Faruq, A., Abdullah, S.S.B., Shah, M.F.N.: Optimization of an intelligent controller for an unmanned underwater vehicle. TELKOMNIKA (Telecommunication Computing Electronics and Control) 9(2), 245–256 (2011)
Feng, G.: A survey on analysis and design of model-based fuzzy control systems. IEEE Trans. Fuzzy Syst. 14(5), 676–697 (2006)
Fossen, T.I.: Guidance and Control of Ocean Vehicles. Wiley, Hoboken (1994)
Fossen, T.I., Lekkas, A.M.: Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents. Int. J. Adapt. Control Signal Process. 31(4), 445–463 (2017)
Fossen, T.I., Pettersen, K.Y.: On uniform semiglobal exponential stability (usges) of proportional line-of-sight guidance laws. Automatica 50(11), 2912–2917 (2014)
Fossen, T.I., Pettersen, K.Y., Galeazzi, R.: Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control Syst. Technol. 23(2), 820–827 (2015)
Fraga, R., Sheng, L.: Double fuzzy logic control for the ship path following. In: Proceedings of the 2nd International Conference on Intelligent Control and Information Processing (ICICIP), pp. 92–96 (2011)
Gao, J., An, X., Proctor, A., Bradley, C.: Sliding mode adaptive neural network control for hybrid visual servoing of underwater vehicles. Ocean Eng. 142, 666–675 (2017)
Gao, J., Proctor, A.A., Shi, Y., Bradley, C.: Hierarchical model predictive image-based visual servoing of underwater vehicles with adaptive neural network dynamic control. IEEE Trans. Cybern. 46(10), 2323–2334 (2016)
Gao, J., Wu, P., Li, T., Proctor, A.: Optimization-based model reference adaptive control for dynamic positioning of a fully actuated underwater vehicle. Nonlinear Dyn. 87(4), 2611–2623 (2017)
Ghommam, J., Chemori, A.: Adaptive RBFNN finite-time control of normal forms for underactuated mechanical systems. Nonlinear Dyn. 90(1), 301–315 (2017)
Ghommam, J., Saad, M.: Backstepping-based cooperative and adaptive tracking control design for a group of underactuated auvs in horizontal plan. Int. J. Control 87(5), 1076–1093 (2014)
Guo, J., Chiu, F.C., Huang, C.C.: Design of a sliding mode fuzzy controller for the guidance and control of an autonomous underwater vehicle. Ocean Eng. 30(16), 2137–2155 (2003)
Hassanein, O., Anavatti, S.G., Ray, T.: Fuzzy modeling and control for autonomous underwater vehicle. In: Proceedings of the 5th International Conference on Automation, Robotics and Applications (ICARA), pp. 169–174 (2011)
He, W., Chen, Y., Yin, Z.: Adaptive neural network control of an uncertain robot with full-state constraints. IEEE Trans. Cybern. 46(3), 620–629 (2016)
He, W., Dong, Y.: Adaptive fuzzy neural network control for a constrained robot using impedance learning. IEEE Trans. Neural Netw. Learn. Syst. (2017). doi:10.1109/TNNLS.2017.2665581
He, W., Yan, Z., Sun, C., Chen, Y.: Adaptive neural network control of a flapping wing micro aerial vehicle with disturbance observer. IEEE Trans. Cybern. 47(10), 3452–3465 (2017)
Ho, W.H., Chen, S.H., Chou, J.H.: Optimal control of Takagi–Sugeno fuzzy-model-based systems representing dynamic ship positioning systems. Appl. Soft Comput. 13(7), 3197–3210 (2013)
Hu, J., Li, T., Guo, C.: Design of ga-based fuzzy control for ship steering. In: Proceedings of the Sixth World Congress on Intelligent Control and Automation (WCICA), pp. 3594–3598 (2006)
Huang, H., Zhang, G., Qing, H., Zhou, Z.: Autonomous underwater vehicle precise motion control for target following with model uncertainty. Int. J. Adv. Rob. Syst. 14(4), 1–11 (2017)
Ishaque, K., Abdullah, S., Ayob, S., Salam, Z.: A simplified approach to design fuzzy logic controller for an underwater vehicle. Ocean Eng. 38(1), 271–284 (2011)
Ishaque, K., Abdullah, S.S., Ayob, S.M., Salam, Z.: Single input fuzzy logic controller for unmanned underwater vehicle. J. Intell. Robot. Syst. 59(1), 87–100 (2010)
Issac, M.T., Adams, S., Bose, N., Williams, C.D., Bachmayer, R., Crees, T.: Analysis of horizontal zigzag manoeuvring trials from the MUN explorer AUV. In: Proceedings of Oceans 2008, pp. 1–7 (2008)
Javadi-Moghaddam, J., Bagheri, A.: An adaptive neuro-fuzzy sliding mode based genetic algorithm control system for under water remotely operated vehicle. Expert Syst. Appl. 37(1), 647–660 (2010)
Javed, S., Ishaque, K., Ali, Z., Saleem, Y.: A simplified yet effective fuzzy logic controller for chemical ship tanker. J. Intell. Fuzzy Syst. 30(1), 29–41 (2016)
Ju, Z., Liu, H.: A unified fuzzy framework for human-hand motion recognition. IEEE Trans. Fuzzy Syst. 19(5), 901–913 (2011)
Ju, Z., Liu, H.: Fuzzy gaussian mixture models. Pattern Recogn. 45(3), 1146–1158 (2012)
Ju, Z., Ouyang, G., Wilamowska-Korsak, M., Liu, H.: Surface EMG based hand manipulation identification via nonlinear feature extraction and classification. IEEE Sens. J. 13(9), 3302–3311 (2013)
Jun, S.W., Kim, D.W., Lee, H.J.: Design of TS fuzzy-model-based controller for depth control of autonomous underwater vehicles with parametric uncertainties. In: Proceedings of the 11th International Conference on Control, Automation and Systems (ICCAS), pp. 1682–1684 (2011)
Jun, S.W., Lee, H.J., et al.: Design of TS fuzzy-model-based diving control of autonomous underwater vehicles: line of sight guidance approach. In: Proceedings of the 12th International Conference on Control, Automation and Systems (ICCAS), pp. 2071–2073 (2012)
Kelasidi, E., Liljebäck, P., Pettersen, K.Y., Gravdahl, J.T.: Integral line-of-sight guidance for path following control of underwater snake robots: theory and experiments. IEEE Trans. Robot. 33(3), 610–628 (2017)
Khaled, N., Chalhoub, N.G.: A self-tuning guidance and control system for marine surface vessels. Nonlinear Dyn. 73(1–2), 897–906 (2013)
Khodayari, M.H., Balochian, S.: Modeling and control of autonomous underwater vehicle (AUV) in heading and depth attitude via self-adaptive fuzzy PID controller. J. Mar. Sci. Technol. 20(3), 559–578 (2015)
Kia, C., Arshad, M.R.: Robotics vision-based heuristic reasoning for underwater target tracking and navigation. Int. J. Adv. Robot. Syst. 2(3), 245–250 (2005)
Kim, T.W., Yuh, J.: Application of on-line neuro-fuzzy controller to AUVs. Inf. Sci. 145(1), 169–182 (2002)
Lakhekar, G., Waghmare, L.: Robust maneuvering of autonomous underwater vehicle: an adaptive fuzzy PI sliding mode control. Intel. Serv. Robot. 10(3), 195–212 (2017)
Lapierre, L., Jouvencel, B.: Robust nonlinear path-following control of an AUV. IEEE J. Ocean. Eng. 33(2), 89–102 (2008)
Lapierre, L., Soetanto, D.: Nonlinear path-following control of an AUV. Ocean Eng. 34(11–12), 1734–1744 (2007)
Larrazabal, J.M., Peñas, M.S.: Intelligent rudder control of an unmanned surface vessel. Expert Syst. Appl. 55, 106–117 (2016)
Layne, J.R., Passino, K.M.: Fuzzy model reference learning control for cargo ship steering. IEEE Control Syst. 13(6), 23–34 (1993)
Le, M.D., Nguyen, S.H., Nguyen, L.A.: Study on a new and effective fuzzy PID ship autopilot. Artif. Life Robot. 8(2), 197–201 (2004)
Lee, C.G., Wang, J.S., Yuh, J.: Self-adaptive neuro-fuzzy systems for autonomous underwater vehicle control. Adv. Robot. 15(5), 589–608 (2001)
Lermusiaux, P.F., Haley Jr., P.J., Jana, S., Gupta, A., Kulkarni, C.S., Mirabito, C., Ali, W.H., Subramani, D.N., Dutt, A., Lin, J., et al.: Optimal planning and sampling predictions for autonomous and lagrangian platforms and sensors in the Northern Arabian Sea 2. Oceanography 30(2), 172–185 (2017)
Liang, X., Li, Y., Peng, Z., Zhang, J.: Nonlinear dynamics modeling and performance prediction for underactuated AUV with fins. Nonlinear Dyn. 84(1), 237–249 (2016)
Liang, X., Qu, X., Hou, Y., Zhang, J.: Three-dimensional path following control of underactuated autonomous underwater vehicle based on damping backstepping. Int. J. Adv. Robot. Syst. 14(4), 1–9 (2017)
Liang, X., Qu, X., Wan, L., Ma, Q.: Three-dimensional path following of an underactuated auv based on fuzzy backstepping sliding mode control. Int. J. Fuzzy Syst. (2017). doi:10.1007/s40815-017-0386-y
Liang, X., Wan, L., Blake, J.I., Shenoi, R.A., Townsend, N.: Path following of an underactuated auv based on fuzzy backstepping sliding mode control. Int. J. Adv. Robot. Syst. 13(3), 122 (2016)
Liu, L., Wang, D., Peng, Z.: ESO-based line-of-sight guidance law for path following of underactuated marine surface vehicles with exact sideslip compensation. IEEE J. Ocean. Eng. 42(2), 477–487 (2017)
Liu, S., Liu, Y., Wang, N.: Robust adaptive self-organizing neuro-fuzzy tracking control of UUV with system uncertainties and unknown dead-zone nonlinearity. Nonlinear Dyn. 89(2), 1397–1414 (2017)
Liu, Y., Fang, P., Bian, D., Zhang, H., Wang, S.: Fuzzy comprehensive evaluation for the motion performance of autonomous underwater vehicles. Ocean Eng. 88, 568–577 (2014)
Liu, Y.C., Liu, S.Y., Wang, N.: Fully-tuned fuzzy neural network based robust adaptive tracking control of unmanned underwater vehicle with thruster dynamics. Neurocomputing 196, 1–13 (2016)
Liu, Z., Zhang, Y., Yu, X., Yuan, C.: Unmanned surface vehicles: an overview of developments and challenges. Annu. Rev. Control 41, 71–93 (2016)
Loc, M.B., Choi, H.S., Kim, J.Y., Kim, Y.H., Murakami, Ri: Design of fuzzy PD depth controller for an AUV. Int. J. Ocean Syst. Eng. 3(1), 16–21 (2013)
Lolla, T., Haley Jr., P., Lermusiaux, P.: Path planning in multi-scale ocean flows: coordination and dynamic obstacles. Ocean Model. 94, 46–66 (2015)
Londhe, P., Patre, B., Waghmare, L., Santhakumar, M.: Robust proportional derivative (PD)-like fuzzy control designs for diving and steering planes control of an autonomous underwater vehicle. J. Intell. Fuzzy Syst. 32(3), 2509–2522 (2017)
Ma, C., Shi, P., Zhao, X., Zeng, Q.: Consensus of Euler–Lagrange systems networked by sampled-data information with probabilistic time delays. IEEE Trans. Cybern. 45(6), 1126–1133 (2015)
Maalouf, D., Chemori, A., Creuze, V.: L1 adaptive depth and pitch control of an underwater vehicle with real-time experiments. Ocean Eng. 98, 66–77 (2015)
Makavita, C., Nguyen, H., Ranmuthugala, D.: Fuzzy gain scheduling based optimally tuned PID controllers for an unmanned underwater vehicle. Int. J. Concept. Electron. Commun. Eng. 2(1), 7–13 (2014)
Malisoff, M., Zhang, F.: Adaptive control for planar curve tracking under controller uncertainty. Automatica 49(5), 1411–1418 (2013)
Mamdani, E.H., Assilian, S.: An experiment in linguistic synthesis with a fuzzy logic controller. Int. J. Man Mach. Stud. 7(1), 1–13 (1975)
Mišković, N., Bibuli, M., Birk, A., Caccia, M., Egi, M., Grammer, K., Marroni, A., Neasham, J., Pascoal, A., Vasilijević, A., et al.: CADDY—cognitive autonomous diving buddy: two years of underwater human–robot interaction. Mar. Technol. Soc. J. 50(4), 54–66 (2016)
Mon, Y.J., Lin, C.M., et al.: Supervisory recurrent fuzzy neural network guidance law design for autonomous underwater vehicle. Int. J. Fuzzy Syst. 14(1), 54–64 (2012)
Ni, J., Wu, L., Shi, P., Yang, S.X.: A dynamic bioinspired neural network based real-time path planning method for autonomous underwater vehicles. Comput. Intell. Neurosci. 2017, 9269,742 (2017)
Ni, J., Yang, S.X.: Bioinspired neural network for real-time cooperative hunting by multirobots in unknown environments. IEEE Trans. Neural Netw. 22(12), 2062–2077 (2011)
Pascoal, A., Kaminer, I., Oliveira, P.: Navigation system design using time-varying complementary filters. IEEE Trans. Aerosp. Electron. Syst. 36(4), 1099–1114 (2000)
Pascoal, A., Oliveira, P., Silvestre, C., Bjerrum, A., Ishoy, A., Pignon, J.P., Ayela, G., Petzelt, C.: Marius: an autonomous underwater vehicle for coastal oceanography. IEEE Robot. Autom. Mag. 4(4), 46–59 (1997)
Pathan, D.M., Unar, M.A., Memon, Z.A.: Fuzzy logic trajectory tracking controller for a tanker. Mehran Univ. Res. J. Eng. Technol. 31(2), 315–324 (2012)
Peng, Z., Wang, D., Wang, J.: Cooperative dynamic positioning of multiple marine offshore vessels: a modular design. IEEE/ASME Trans. Mechatron. 21(3), 1210–1221 (2016)
Peng, Z., Wang, D., Wang, J.: Predictor-based neural dynamic surface control for uncertain nonlinear systems in strict-feedback form. IEEE Trans. Neural Netw. Learn. Syst. 28(9), 2156–2167 (2017)
Peng, Z., Wang, D., Wang, W., Liu, L.: Containment control of networked autonomous underwater vehicles: a predictor-based neural DSC design. ISA Trans. 59, 160–171 (2015)
Peng, Z., Wang, J.: Output-feedback path-following control of autonomous underwater vehicles based on an extended state observer and projection neural networks. IEEE Trans. Syst. Man Cybern. Syst. (2017). doi:10.1109/TSMC.2017.2697447
Peng, Z., Wang, J., Wang, D.: Containment maneuvering of marine surface vehicles with multiple parameterized paths via spatial–temporal decoupling. IEEE/ASME Trans. Mechatron. 22(2), 1026–1036 (2017)
Peng, Z., Wang, J., Wang, D.: Distributed containment maneuvering of multiple marine vessels via neurodynamics-based output feedback. IEEE Trans. Ind. Electron. 64(5), 3831–3839 (2017)
Peng, Z., Wang, J., Wang, D.: Distributed maneuvering of autonomous surface vehicles based on neurodynamic optimization and fuzzy approximation. IEEE Trans. Control Syst. Technol. (2017). doi:10.1109/TCST.2017.2699167
Qi, D., Feng, J., Yang, J.: Longitudinal motion control of auv based on fuzzy sliding mode method. J. Control Sci. Eng. 2016, 7428,361 (2016)
Qiao, L., Zhang, W.: Adaptive non-singular integral terminal sliding mode tracking control for autonomous underwater vehicles. IET Control Theory Appl. 11(8), 1293–1306 (2017)
Raeisy, B., Safavi, A.A., Khayatian, A.R.: Optimized fuzzy control design of an autonomous underwater vehicle. Iran. J. Fuzzy Syst. 9(2), 25–41 (2012)
Raimondi, F.M., Melluso, M.: Hierarchical fuzzy/lyapunov control for horizontal plane trajectory tracking of underactuated AUV. In: Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), pp. 1875–1882 (2010)
Ren, J., Zhang, X.: Fuzzy-approximator-based adaptive controller design for ship course-keeping steering in strict-feedback forms. Res. J. Appl. Sci. Eng. Technol. 6(3), 2907–2913 (2013)
Rigatos, G., Siano, P.: Flatness-based adaptive fuzzy control of autonomous submarines. Intell. Ind. Syst. 1(3), 187–200 (2015)
Rigatos, G., Tzafestas, S.: Adaptive fuzzy control for the ship steering problem. Mechatronics 16(8), 479–489 (2006)
Salim, M., Noordin, A., Jahari, A.: A robust of fuzzy logic and proportional derivative control system for monitoring underwater vehicles. In: Proceedings of the Second International Conference on Computer Research and Development, pp. 849–853 (2010)
Salman, S., Anavatti, S.A., Asokan, T.: Adaptive fuzzy control of unmanned underwater vehicles. Indian J. Geo Mar. Sci. 40(2), 168–175 (2011)
Sebastián, E., Sotelo, M.A.: Adaptive fuzzy sliding mode controller for the kinematic variables of an underwater vehicle. J. Intell. Robot. Syst. 49(2), 189–215 (2007)
Shojaei, K.: Neural adaptive robust control of underactuated marine surfacevehicles with input saturation. Appl. Ocean Res. 53(4), 267–278 (2015)
Shojaei, K.: Observer-based neural adaptive formation control of autonomous surface vessels with limited torque. Robot. Auton. Syst. 78, 83–96 (2016)
Shojaei, K., Dolatshahi, M.: Line-of-sight target tracking control of underactuated autonomous underwater vehicles. Ocean Eng. 133, 244–252 (2017)
Smith, S.M., Rae, G.J.S., Anderson, D.T.: Applications of fuzzy logic to the control of an autonomous underwater vehicle. In: Proceedings of the Second IEEE International Conference on Fuzzy Systems, pp. 1099–1106 (1993)
Son, M.J., Kim, Tw: Torpedo evasion simulation of underwater vehicle using fuzzy-logic-based tactical decision making in script tactics manager. Expert Syst. Appl. 39(9), 7995–8012 (2012)
Su, H., Li, Z., Chen, M.Z.: Distributed estimation and control for two-target tracking mobile sensor networks. J. Frankl. Inst. 354(7), 2994–3007 (2017)
Su, H., Qiu, Y., Wang, L.: Semi-global output consensus of discrete-time multi-agent systems with input saturation and external disturbances. ISA Trans. 67, 131–139 (2017)
Sun, B., Zhu, D., Jiang, L., Yang, S.X.: A novel fuzzy control algorithm for three-dimensional AUV path planning based on sonar model. J. Intell. Fuzzy Syst. 26(6), 2913–2926 (2014)
Sun, B., Zhu, D., Yang, S.X.: A bioinspired filtered backstepping tracking control of 7000-m manned submarine vehicle. IEEE Trans. Ind. Electron. 61(7), 3682–3693 (2014)
Sun, B., Zhu, D., Yang, S.X.: A novel tracking controller for autonomous underwater vehicles with thruster fault accommodation. J. Navig. 69(3), 593–612 (2016)
Sutton, R., Craven, P.J.: A fuzzy autopilot design approach that utilizes non-linear consequent terms. J. Mar. Sci. Technol. 9(2), 65–74 (2001)
Sutton, R., Roberts, G., Taylor, S.: Tuning fuzzy ship autopilots using artificial neural networks. Trans. Inst. Meas. Control 19(2), 94–106 (1997)
Takagi, T., Sugeno, M.: Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 15(1), 116–132 (1985)
Tang, Z., He, Q., Wang, S., Shen, J., Luo, J.: Predictive fuzzy PID control method for underwater vehicles. J. Comput. Inform. Syst. 8(9), 3635–3642 (2012)
Tee, K.P., Ge, S.S.: Control of fully actuated ocean surface vessels using a class of feedforward approximators. IEEE Trans. Control Syst. Technol. 14(4), 750–756 (2006)
Teo, K., An, E., Beaujean, P.P.J.: A robust fuzzy autonomous underwater vehicle (AUV) docking approach for unknown current disturbances. IEEE J. Ocean. Eng. 37(2), 143–155 (2012)
Teo, K., Goh, B., Chai, O.K.: Fuzzy docking guidance using augmented navigation system on an AUV. IEEE J. Ocean. Eng. 40(2), 349–361 (2015)
Thekkedan, M.D., Chin, C.S., Woo, W.L.: Virtual reality simulation of fuzzy-logic control during underwater dynamic positioning. J. Mar. Sci. Appl. 14(1), 14–24 (2015)
Utkin, V.I.: Sliding mode control design principles and applications to electric drives. IEEE Trans. Ind. Electron. 40(1), 23–36 (1993)
Velagic, J., Vukic, Z., Omerdic, E.: Adaptive fuzzy ship autopilot for track-keeping. Control Eng. Pract. 11(4), 433–443 (2003)
Wang, H., Guo, D., Liang, X., Chen, W., Hu, G., Leang, K.K.: Adaptive vision-based leader-follower formation control of mobile robots. IEEE Trans. Ind. Electron. 64(4), 2893–2902 (2017)
Wang, H., Wang, D., Peng, Z.: Adaptive dynamic surface control for cooperative path following of marine surface vehicles with input saturation. Nonlinear Dyn. 77(1–2), 107–117 (2014)
Wang, H., Wang, D., Peng, Z.: Adaptive neural control for cooperative path following of marine surface vehicles: state and output feedback. Int. J. Syst. Sci. 47(2), 343–359 (2016)
Wang, H., Yang, B., Liu, Y., Chen, W., Liang, X., Pfeifer, R.: Visual servoing of soft robot manipulator in constrained environments with an adaptive controller. IEEE/ASME Trans. Mechatron. 22(1), 41–50 (2017)
Wang, J.S., Lee, C.S.G.: Self-adaptive recurrent neuro-fuzzy control of an autonomous underwater vehicle. IEEE Trans. Robot. Autom. 19(2), 283–295 (2003)
Wang, L.X.: Stable adaptive fuzzy control of nonlinear systems. IEEE Trans. Fuzzy Syst. 1(2), 146–155 (1993)
Wang, L.X., Mendel, J.M.: Fuzzy basis functions, universal approximation, and orthogonal least-squares learning. IEEE Trans. Neural Netw. 3(5), 807–814 (1992)
Wang, M., Yu, Y., Lin, W.: A novel adaptive fuzzy autopilot design for ASV tracking control. In: Proceedings of the International Conference on Artificial Intelligence and Industrial Engineering, pp. 569–572 (2015)
Wang, N., Er, M.J.: Direct adaptive fuzzy tracking control of marine vehicles with fully unknown parametric dynamics and uncertainties. IEEE Trans. Control Syst. Technol. 24(5), 1845–1852 (2016)
Wang, N., Er, M.J., Sun, J.C., Liu, Y.C.: Adaptive robust online constructive fuzzy control of a complex surface vehicle system. IEEE Trans. Cybern. 46(7), 1511–1523 (2016)
Wang, N., Gao, Y., Sun, Z., Zheng, Z.: Nussbaum-based adaptive fuzzy tracking control of unmanned surface vehicles with fully unknown dynamics and complex input nonlinearities. Int. J. Fuzzy Syst. (2017). doi:10.1007/s40815-017-0387-x
Wang, N., Lv, S., Er, M.J., Chen, W.H.: Fast and accurate trajectory tracking control of an autonomous surface vehicle with unmodeled dynamics and disturbances. IEEE Trans. Intell. Veh. 1(3), 230–243 (2016)
Wang, N., Lv, S., Zhang, W., Liu, Z., Er, M.J.: Finite-time observer based accurate tracking control of a marine vehicle with complex unknowns. Ocean Eng. 145, 406–415 (2017)
Wang, N., Qian, C., Sun, J.C., Liu, Y.C.: Adaptive robust finite-time trajectory tracking control of fully actuated marine surface vehicles. IEEE Trans. Control Syst. Technol. 24(4), 1454–1462 (2016)
Wang, N., Su, S.F., Yin, J., Zheng, Z., Er, M.J.: Global asymptotic model-free trajectory-independent tracking control of an uncertain marine vehicle: An adaptive universe-based fuzzy control approach. IEEE Trans. Fuzzy Syst. (2017). doi:10.1109/TFUZZ.2017.2737405
Wang, N., Sun, J.C., Er, M.J.: Tracking-error-based universal adaptive fuzzy control for output tracking of nonlinear systems with completely unknown dynamics. IEEE Trans. Fuzzy Syst. (2017). doi:10.1109/TFUZZ.2017.2697399
Wang, N., Sun, J.C., Han, M., Zheng, Z., Er, M.J.: Adaptive approximation-based regulation control for a class of uncertain nonlinear systems without feedback linearizability. IEEE Trans. Neural Netw. Learn. Syst. (2017). doi:10.1109/TNNLS.2017.2738918
Wang, N., Sun, Z., Zheng, Z., Zhao, H.: Finite-time sideslip observer-based adaptive fuzzy path-following control of underactuated marine vehicles with time-varying large sideslip. Int. J. Fuzzy Syst. (2017). doi:10.1007/s40815-017-0392-0
Wang, S., Zhang, H., Hou, W., Liang, J.: Control and navigation of the variable buoyancy AUV for underwater landing and takeoff. Int. J. Control 80(7), 1018–1026 (2007)
Wang, W., Xie, G.: Online high-precision probabilistic localization of robotic fish using visual and inertial cues. IEEE Trans. Ind. Electron. 62(2), 1113–1124 (2015)
Wang, Y., Shen, Y., Wang, K., Sha, Q., He, B., Yan, T.: Fuzzy controller used smoothing function for depth control of autonomous underwater vehicle. In: Proceedings of the OCEANS’16 MTS/IEEE Shanghai, pp. 1–5 (2016)
Wang, Y., Zhang, M., Chu, Z., Liu, X.: Fault-tolerant control based on adaptive sliding mode for underwater vehicle with thruster fault. In: proceedings of the 2014 11th World Congress on Intelligent Control and Automation (WCICA), pp. 5323–5328 (2014)
Wang, Y., Zhang, M., Su, H.: Modular design method and module interface development for small reconfigurable underwater vehicle. In: Proceedings of the 2011 International Conference on Mechatronics and Automation (ICMA), pp. 1479–1484 (2011)
Wang, Y., Zhang, M., Wilson, P.A., Liu, X.: Adaptive neural network-based backstepping fault tolerant control for underwater vehicles with thruster fault. Ocean Eng. 110, 15–24 (2015)
Wynn, R.B., Huvenne, V.A., Le Bas, T.P., Murton, B.J., Connelly, D.P., Bett, B.J., Ruhl, H.A., Morris, K.J., Peakall, J., Parsons, D.R., et al.: Autonomous underwater vehicles (AUVs): their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 352, 451–468 (2014)
Xia, G., Pang, C., Xue, J.: Fuzzy neural network-based robust adaptive control for dynamic positioning of underwater vehicles with input dead-zone. J. Intell. Fuzzy Syst. 29(6), 2585–2595 (2015)
Xiang, X., Jouvencel, B., Parodi, O.: Coordinated formation control of multiple autonomous underwater vehicles for pipeline inspection. Int. J. Adv. Robot. Syst. 7(1), 75–84 (2010)
Xiang, X., Lapierre, L., Jouvencel, B.: Smooth transition of AUV motion control: from fully-actuated to under-actuated configuration. Robot. Auton. Syst. 67, 14–22 (2015)
Xiang, X., Liu, C., Lapierre, L., Jouvencel, B.: Synchronized path following control of multiple homogenous underactuated AUVs. J. Syst. Sci. Complex. 25(1), 71–89 (2012)
Xiang, X., Liu, C., Su, H., Zhang, Q.: On decentralized adaptive full-order sliding mode control of multiple UAVs. ISA Trans. (2017). doi:10.1016/j.isatra.2017.09.008
Xiang, X., Niu, Z., Lapierre, L., Zuo, M.: Hybrid underwater robotic vehicles: the state-of-the-art and future trends. HKIE Trans. 22(2), 103–116 (2015)
Xiang, X., Yu, C., Niu, Z., Zhang, Q.: Subsea cable tracking by autonomous underwater vehicle with magnetic sensing guidance. Sensors 16(8), 1335 (2016)
Xiang, X., Yu, C., Zhang, Q.: On intelligent risk analysis and critical decision of underwater robotic vehicle. Ocean Eng. 140, 453–465 (2017)
Xiang, X., Yu, C., Zhang, Q.: Robust fuzzy 3D path following for autonomous underwater vehicle subject to uncertainties. Comput. Oper. Res. 84, 165–177 (2017)
Xiang, X., Yu, C., Zhang, Q., Xu, G.: Path-following control of an AUV: fully actuated versus under-actuated configuration. Mar. Technol. Soc. J. 50(1), 34–47 (2016)
Xiang, X., Yu, C., Zheng, J., Xu, G.: Motion forecast of intelligent underwater sampling apparatus-part i: design and algorithm. Indian J. Geo Mar. Sci. 44(12), 1962–1970 (2015)
Xu, B., Pandian, S.R., Sakagami, N., Petry, F.: Neuro-fuzzy control of underwater vehicle-manipulator systems. J. Frankl. Inst. 349(3), 1125–1138 (2012)
Xu, B., Yang, C., Pan, Y.: Global neural dynamic surface tracking control of strict-feedback systems with application to hypersonic flight vehicle. IEEE Trans. Neural Netw. Learn. Syst. 26(10), 2563–2575 (2015)
Xu, B., Zhang, Q., Pan, Y.: Neural network based dynamic surface control of hypersonic flight dynamics using small-gain theorem. Neurocomputing 173, 690–699 (2016)
Yang, Y., Zhou, C., Jia, X.: Robust adaptive fuzzy control and its application to ship roll stabilization. Inf. Sci. 142(1), 177–194 (2002)
Yang, Y., Zhou, C., Ren, J.: Model reference adaptive robust fuzzy control for ship steering autopilot with uncertain nonlinear systems. Appl. Soft Comput. 3(4), 305–316 (2003)
Yu, C., Xiang, X.: Robust variable-depth path following of an under-actuated autonomous underwater vehicle with uncertainties. Indian J. Geo Mar. Sci. (2018)
Yu, C., Xiang, X., Dai, J.: 3D path following for under-actuated AUV via nonlinear fuzzy controller. In: Proceedings of the OCEANS’16 MTS/IEEE Shanghai, pp. 1–7 (2016)
Yu, C., Xiang, X., Lapierre, L., Zhang, Q.: Nonlinear guidance and fuzzy control for three-dimensional path following of an underactuated autonomous underwater vehicle. Ocean Eng. 146, 457–467 (2017)
Yu, C., Xiang, X., Lapierre, L., Zhang, Q.: Robust magnetic tracking of subsea cable by AUV in the presence of sensor noise and ocean currents. IEEE J. Ocean. Eng. (2018)
Yu, C., Xiang, X., Zhang, Q., Xu, G.: Adaptive fuzzy trajectory tracking control of an under-actuated autonomous underwater vehicle subject to actuator saturation. Int. J. Fuzzy Syst. (2017). doi:10.1007/s40815-017-0396-9
Yu, J., Liu, J., Wu, Z., Fang, H.: Depth control of a bioinspired robotic dolphin based on sliding mode fuzzy control method. IEEE Trans. Ind. Electron. (2017). doi:10.1109/TIE.2017.2745451
Yu, J., Su, Z., Wu, Z., Tan, M.: Development of a fast-swimming dolphin robot capable of leaping. IEEE/ASME Trans. Mechatron. 21(5), 2307–2316 (2016)
Yu, J., Su, Z., Wu, Z., Tan, M.: An integrative control method for bio-inspired dolphin leaping: design and experiments. IEEE Trans. Ind. Electron. 63(5), 3108–3116 (2016)
Yuan, L., Wu, H.S.: Terminal sliding mode fuzzy control based on multiple sliding surfaces for nonlinear ship autopilot systems. J. Mar. Sci. Appl. 9(4), 425–430 (2010)
Zadeh, L.A.: Fuzzy sets. Inf. Control 8(3), 338–353 (1965)
Zeng, Z., Lammas, A., Sammut, K., He, F., Tang, Y.: Shell space decomposition based path planning for AUVs operating in a variable environment. Ocean Eng. 91, 181–195 (2014)
Zeng, Z., Lian, L., Sammut, K., He, F., Tang, Y., Lammas, A.: A survey on path planning for persistent autonomy of autonomous underwater vehicles. Ocean Eng. 110, 303–313 (2015)
Zeng, Z., Sammut, K., Lian, L., He, F., Lammas, A., Tang, Y.: A comparison of optimization techniques for AUV path planning in environments with ocean currents. Robot. Auton. Syst. 82, 61–72 (2016)
Zhang, F., Fratantoni, D.M., Paley, D.A., Lund, J.M., Leonard, N.E.: Control of coordinated patterns for ocean sampling. Int. J. Control 80(7), 1186–1199 (2007)
Zhang, F., Marani, G., Smith, R.N., Choi, H.T.: Future trends in marine robotics. IEEE Robot. Autom. Mag. 22(1), 14–122 (2015)
Zhang, G., Cai, Y., Zhang, W.: Robust neural control for dynamic positioning ships with the optimum-seeking guidance. IEEE Trans. Syst. Man Cybern. Syst. 47(7), 1500–1509 (2017)
Zhang, L., Jouvencel, B., Fang, Z., Xiang, X.: 3D reconstruction of seabed surface through sonar data of AUVs. Indian J. Geo Mar. Sci. 41(6), 509–515 (2012)
Zhang, L., Pang, Y., Su, Y., Liang, Y.: HPSO-based fuzzy neural network control for AUV. J. Control Theory Appl. 6(3), 322–326 (2008)
Zhang, Mj, Wu, J., Chu, Zz: Multi-fault diagnosis for autonomous underwater vehicle based on fuzzy weighted support vector domain description. China Ocean Eng. 28(5), 599–616 (2014)
Zhang, Q., Hayashibe, M., Azevedo-Coste, C.: Evoked electromyography-based closed-loop torque control in functional electrical stimulation. IEEE Trans. Biomed. Eng. 60(8), 2299–2307 (2013)
Zhang, Q., Hayashibe, M., Fraisse, P., Guiraud, D.: FES-induced torque prediction with evoked EMG sensing for muscle fatigue tracking. IEEE/ASME Trans. Mechatron. 16(5), 816–826 (2011)
Zhang, Q., Lapierre, L., Xiang, X.: Distributed control of coordinated path tracking for networked nonholonomic mobile vehicles. IEEE Trans. Ind. Inf. 9(1), 472–484 (2013)
Zhang, Q., Liu, R., Chen, W., Xiong, C.: Simultaneous and continuous estimation of shoulder and elbow kinematics from surface EMG signals. Front. Neurosci. 11, 1–12 (2017). doi:10.3389/ins.2017.00280
Zhang, W., Chen, H., Chen, T., Yan, Z., Ren, H.: Research on coordinated robotic motion control based on fuzzy decoupling method in fluidic environments. Math. Probl. Eng. 2014, 1–10 (2014)
Zheng, Z., Feroskhan, M.: Path following of a surface vessel with prescribed performance in the presence of input saturation and external disturbances. IEEE/ASME Trans. Mechatron. (2017). doi:10.1109/TMECH.2017.2756110
Zheng, Z., Huang, Y., Xie, L., Zhu, B.: Adaptive trajectory tracking control of a fully actuated surface vessel with asymmetrically constrained input and output. IEEE Trans. Control Syst. Technol. (2017). doi:10.1109/TCST.2017.2728518
Zheng, Z., Jin, C., Zhu, M., Sun, K.: Trajectory tracking control for a marine surface vessel with asymmetric saturation actuators. Robot. Auton. Syst. 97, 83–91 (2017)
Zheng, Z., Jin, Z., Sun, L., Zhu, M.: Adaptive sliding mode relative motion control for autonomous carrier landing of fixed-wing unmanned aerial vehicles. IEEE Access 5, 5556–5565 (2017)
Zheng, Z., Sun, L.: Path following control for marine surface vessel with uncertainties and input saturation. Neurocomputing 177, 158–167 (2016)
Zheng, Z., Sun, L., Xie, L.: Error-constrained los path following of a surface vessel with actuator saturation and faults. IEEE Trans. Syst. Man Cybern. Syst. (2017). doi:10.1109/TSMC.2017.2717850
Zheng, Z., Yan, K., Yu, S., Zhu, B., Zhu, M.: Path following control for a stratospheric airship with actuator saturation. Trans. Inst. Meas. Control 39(7), 987–999 (2017)
Zhu, D., Cao, X., Sun, B., Luo, C.: Biologically inspired self-organizing map applied to task assignment and path planning of an AUV system. IEEE Trans. Cognit. Dev. Syst. (2017). doi:10.1109/TCDS.2017.2727678
Zhu, D., Hua, X., Sun, B.: A neurodynamics control strategy for real-time tracking control of autonomous underwater vehicles. J. Navig. 67(1), 113–127 (2014)
Zhu, D., Huang, H., Yang, S.X.: Dynamic task assignment and path planning of multi-AUV system based on an improved self-organizing map and velocity synthesis method in three-dimensional underwater workspace. IEEE Trans. Cybern. 43(2), 504–514 (2013)
Zhu, D., Lv, R., Cao, X., Yang, S.X.: Multi-AUV hunting algorithm based on bio-inspired neural network in unknown environments. Int. J. Adv. Robot. Syst. 12(11), 1–12 (2015)
Zhu, D., Zhao, Y., Yan, M.: A bio-inspired neurodynamics-based backstepping path-following control of an AUV with ocean current. Int. J. Robot. Autom. 27(3), 298–307 (2012)
Zuo, M., Xiang, X., Yu, C., Zheng, J.: Motion forecast of intelligent underwater sampling apparatus—part ii: CFD simulation and experimental results. Indian J. Geo Mar. Sci. 44(12), 1971–1979 (2015)
Acknowledgements
This work is supported by National Natural Science Foundation of China (under Grant 51579111 and 51209100), the Fundamental Research Funds for the Central Universities (under Grant 2017KFYXJJ005), State Key Laboratory of Ocean Engineering (under Grant 1504), and International Exchanges of the UK Royal Society (under Grant IE161588).
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Xiang, X., Yu, C., Lapierre, L. et al. Survey on Fuzzy-Logic-Based Guidance and Control of Marine Surface Vehicles and Underwater Vehicles. Int. J. Fuzzy Syst. 20, 572–586 (2018). https://doi.org/10.1007/s40815-017-0401-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-017-0401-3