
Abstract
This paper investigates bifurcations analysis and resonances in a discrete-time prey-predator model analytically and numerically as well. The local stability conditions of all the fixed points in the system are determined. Here, codim-1 and codim-2 bifurcation including multiple and generic bifurcations in the discrete model are explored. The model undergoes fold bifurcation, flip bifurcation, Neimark–Sacker bifurcation and resonances 1:2, 1:3, 1:4 at different fixed points. Using the critical normal form theorem and bifurcation theory, normal form coefficients are calculated for each bifurcation. The different bifurcation curves of fixed points are drawn which validate the analytical findings. The numerical simulation gives a wide range of periodic cycles including codim-1 bifurcation and resonance curves in the system. The results in this manuscript reveal that the dynamics of the discrete-time model in both single-parameter and two-parameter spaces are inherently rich and complex. The resonance bifurcation in the discrete-time map indicates that both species coincide till order 4 in stable periodic cycles near some critical parametric values.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In ecology, the interaction between distinct species causes conflict, cooperation and consumption. The prey-predator system is the most fundamental linkage among them. Almost a century ago, the predator and prey populations had many variations based on their experimental evidence. As well as describing nonlinear ecosystem interactions such as competition, scavenging, and mutualism, the Lotka–Volterra model provides a general framework for other kinds of nonlinear interactions. The study of the dynamical behaviors of prey-predator models has drawn the attention of many mathematical ecologists [1,2,3,4,5,6].
The investigation of the prey-predator model in both cases discrete and continuous-time is a matter of interest [7,8,9,10,11,12]. For discrete-time model, the population includes non-overlapping generation i.e. population density is very low. These kinds of models are explained well by difference equation [13,14,15,16]. The discrete system can produce more realistic dynamics than the corresponding continuous counterparts [17,18,19,20]. Therefore many authors investigated discrete-time models and determined the interesting dynamical behavior including a wide range of bifurcation [21,22,23,24,25].
Maynard Smith [26] first studied the Lotka–Volterra discrete-time predator–prey system which was further investigated by Levine [27] and Liu and Xiao [28]. The discrete model exhibits complex dynamical behavior including flip bifurcation, fold bifurcation, and Neimark–Sacker bifurcation. In another investigation, the discrete version of the predator–prey model with Holling type-II functional response was studied by Hadelar and Gerstmann [29]. Also, Li and Zhang [30] gave a detailed discussion for codimension one bifurcation and parametric restriction for stability. A discrete predator–prey model with Holling type-II functional response was investigated for bifurcation and chaotic dynamics [31]. In recent work, Singh and Deolia studied a discretized Leslie-Gower predator–prey model in which the system exhibits codimension-1 bifurcation including flip bifurcation, fold bifurcation, and Neimark–Sacker bifurcation [32]. There are several investigations in which the discrete models show interesting dynamics including bifurcation and chaos [33,34,35,36,37,38].
In the previous decade, the bifurcation for higher codimension has played a significant role in discrete-time models because it reveals more complicated dynamical behavior. Resonance bifurcations are the most crucial higher codimension bifurcation in nonlinear systems. At first Kuznetsov [39] gave the theory of codimension two resonance bifurcations. The resonance bifurcations such as 1:1(R1), 1:2(R2), 1:3(R3) and 1:4(R4) may be determined by using the critical normal form coefficient (CNFC) method. Other researchers also explored resonances bifurcation of codim-2 in the discrete-time model, see Kuznetsov and Meijer [40], Alidousti et al. [41], Eskandari and Alidousti [42, 43], Ghaziani et al. [44], Naik et al.[45, 46] etc. Eskandari and Alidousti [43] explored codim-2 bifurcation viz. generalized flip bifurcation and strong resonances in a discrete predator–prey system. Alidousti et al. [41] studied a discretized Bonhoeffer-van der Pol oscillator system and determined codim-2 bifurcation. In another study, the codimension-two resonance bifurcations is reported in Bazykin-Berezovskaya two species discrete model with Allee effect [47]. A discretized version of the two-species model with mixed functional responses was discussed by Naik et al. [48]. They resulted in a detailed bifurcation phenomenon and control of chaos.
A functional response in ecology refers to the intake rate for the predator as a function of prey density. Due to the implementation of a particular type of functional response, the dynamical behavior of the predator–prey model is affected [49]. As discussed in [50], there are generally three types of functional response in dynamical systems: linear (type-I), hyperbolic (type-II), and sigmoidal (type-III). There is a direct connection between the prey density and the predator consumption rate in the Holling type-I functional response.
Let \(M(\theta )\) and \(Q(\theta )\) be the prey and predator population densities, respectively. Then prey-predator model with Holling type-I functional response in prey is represented as [51]
The maximum per capita growth rate for prey population is represented by \(a_1\). The strength for intra-specific competition among prey populations is denoted by \(b_1\). The parameter \(c_1\) represents the strength of intra-species competition between predator and prey. The conversion rate of prey species into predators is denoted by \(d_1\) and the per capita death rate of predator species is described by f. All involved parameters are taken as positive.
The non-dimensionalized form of (1) can be obtained with the help of the following transformation for reducing parameters:
The non-dimensionalized version of (1) is written as
where \(a=\dfrac{a_1}{f}\), \(\beta =\dfrac{b_1}{a_1d_1}\), \(c=\dfrac{c_1}{a_1}\).
Here we deploy a piecewise constant argument approach to discretize the model (2) [7, 23, 52]:
Here \(x_n\) and \(y_{n}\) denote prey population and predator population respectively.
The model (3) can be rewritten in form of a map
where all involve parameters a, \(\beta \) and c are positive.
Elsadany and Matouk discussed the local stability of equilibria and Neimark–Sacker bifurcation in a fractional-ordered model of (2) [51]. In another work, Lin et al. [53] studied local stability, flip bifurcation and Neimarck–Sacker bifurcation in a discrete version of the model (2). The authors attempted to control the chaos by using control techniques. But as far as our knowledge, the exploration of codim-2 resonance bifurcations in the above model is missing. The most variation between our results and the studied ones is for us to investigate all codimension two resonances bifurcations including 1:2(R2), 1:3(R3) and 1:4(R4) for different parameters in the map (4). This map is a good illustration of two species interaction for non-overlapping generations.
This study obtains the normal form coefficients to confirm the nondegeneracy of codim-1 and codim-2 bifurcations in the model. The advantage of this technique is that it can avoid the conversion of the linear part of the system into Jordan form. Section 3 discusses codim-1 bifurcation such as fold bifurcation, period-doubling (flip) bifurcation and Neimark–Sacker bifurcation on varying one parameter. Section 3.2 examines various codim-2 bifurcations including 1:2 resonance(R2), 1:3 resonance(R3), and 1:4 resonance(R4) in the model when two parameters are varied. Section 4 presents a detailed numerical study using MATCONTM. Section 5 outlines a brief conclusion.
2 Fixed point and stability analysis
Let \((x^*,y^*)\) be any fixed point of the discrete map (4) in a region \(D=\{(x,y):x,y \in \mathbb {R}^2_{+}\}\) such that
The trivial fixed point \(E^*_1(x^*_1,y^*_1)=(0,0)\) always exists and two other fixed points \(E^*_2(x^*_2,y^*_2)\) and \(E^*_3(x^*_3,y^*_3)\) are as follows:
The two eigenvalues are \(\mid \Lambda _1\mid = \mid e^a\mid >1\) and \(\mid \Lambda _2\mid = \mid \dfrac{1}{e}\mid <1\) for Jacobian matrix \(J(E^*_1)\). Therefore the trivial fixed point \(E^*_1\) is a saddle point.
Similarly, the Jacobian matrix \(J(E^*_2)\) gives eigenvalues \(\Lambda _1=1-a\) and \(\Lambda _2=e^{\frac{ac-\beta }{\beta }}\). Table 1 summarizes the local stability of semi-positive fixed point \(E^*_2\).
Let \(P(\Lambda )\) be a characteristic polynomial of associated variational matrix \(J(E^*_3)\):
where
Then
when \(\beta <ac\).
As \(P(1)>0\) and \(\Lambda _1\) and \(\Lambda _2\) be two roots of characteristic equation \(P(\Lambda )=0\), we summarize the stability of fixed point \(E^*_3\) in Table 2 (from lemma 2.2 in [16]).
3 Bifurcation analysis
The map (4) can be rewritten as
where \(\mu =(a,\beta ,c)\).
The corresponding Jacobian matrix J at arbitrary fixed point \((x^*, y^*)\) is
Let us consider a smooth map F
where \(A=J\) and B and C are multi linear functions corresponding to (4), discussed in [40].
Here
where
and \(X=(x_1,x_2)^T\), \(Y=(y_1,y_2)^T\), \(Z=(z_1,z_2)^T\).
3.1 Codimension-1 bifurcations at semi-positive fixed point \((E^*_2)\)
In this section, fold bifurcation and degenerate flip bifurcation are being determined at fixed point \(E^*_{2}\).
3.1.1 Fold bifurcation
Theorem 1
There is an occurrence of non-degenerate fold bifurcation in the system (4) at \(E^*_{2}(x^*_2,y^*_2)\) when
-
(i)
\(\beta ={ac}\), provided \(a\ne 0,2.\)
-
(ii)
\(a=\dfrac{\beta }{c}\), provided \(a\ne 0,2.\)
-
(iii)
\(c=\dfrac{\beta }{a}\), provided \(a\ne 0,2.\)
Proof
(i) From Table 2, it can be noted that the associated Jacobian matrix \(J(E^*_{2})\) has one eigenvalue \(\Lambda _1=1\) and other eigenvalue \(\Lambda _2\ne \pm 1\) when \(\beta =ac\) and \(a\ne 0,2\).
The center manifold at \(\beta =ac\) is taken as
where
and
The restriction of the map (4) on (5) has the following form:
For center manifold invariance, it is obtained
where \(\mu ^*=(a,ac,\beta )^T\).
Now we calculate the required condition
We apply solvability conditions to the singular system (8), it is obtained
then
Thus fold bifurcation occurs in the map (6) at \(E^*_2\).
The critical normal form coefficients (CNFCs) of fold bifurcation, given in theorem 1, are determined as
A fold bifurcation implies that a fixed point can never be destroyed and must exist for all values of a parameter. In such case, as the parameter changes, the fixed point may lose its stability. \(\square \)
3.1.2 Period doubling (flip) bifurcation
Theorem 2
A non-degenerate flip (Period-doubling) bifurcation occurs in the system (4)
(i) at \(E^*_{2}(x^*_2,y^*_2)\) for \(a=2\) when \(\beta \ne 2c\),
(ii) at \(E^*_{3}(x^*_3,y^*_3)\) for \(c=\dfrac{3\beta }{4+a}\) when \(a\ne 2,8\).
Proof
(i) From Table 1, it can be observed that corresponding Jacobian matrix \(J(E^*_{2})\) has eigenvalue \(\Lambda _1=-1\) and \(\Lambda _2\ne \pm 1\), for \(\beta \ne 2c.\)
The centre manifold for the map (4) at \(a=2\) is
The eigenvectors corresponding to eigenvalue \(-1\) such that
where \(v=\left( \begin{array}{c} 1 \\ 0\\ \end{array}\right) \), \(u=\left( \begin{array}{c} 1\\ \\ \dfrac{2}{\beta \left( 1+e^{\left( \dfrac{2c-\beta }{\beta }\right) }\right) }\\ \end{array}\right) \).
The map (4) can be written in the normal form at critical parameter
The invariance in the center manifold gives
Now we collect the power of \(\nu \) up to third order in the above expansion, we get
where \(\mu ^*=(a,\beta ,c)=(2,\beta .c)\).
If the system (12) is non-singular, \(m_2=\left( \begin{array}{c} 0\\ 0 \\ \end{array}\right) .\)
The solvability conditions of (13) yields
We get
The period-doubling bifurcation is non-degenerate provided \(b_{PD}\ne 0\).
For \(b_{PD}>0\), bifurcation is super-critical otherwise sub-critical bifurcation for \(b_{PD}<0\).
(ii) The proof is similar line to the theorem 2(i).
The CNFC for period-doubling bifurcation is obtained as
The period-doubling bifurcation is non-degenerate if \(b_{PD}\ne 0\). The double period cycle is stable and hence super-critical bifurcation occurs for \(b_{PD}>0\). For \(b_{PD}<0\), the period-2 cycle is unstable i.e. sub-critical bifurcation occurs. \(\square \)
3.1.3 Neimark–Sacker bifurcation
Theorem 3
The map (4) exhibits non-degenerate Neimark–Sacker bifurcation (NSB) at fixed point \(E^*_3\) for \(c=\dfrac{2\beta }{a}\), provided \(a\ne 0,8\) and \(\beta <4c\).
Proof
It is evident from Table 2, for non-hyperbolicity of fixed point \(E^*_3\), \(c=\dfrac{2\beta }{a}\); \(a\ne 0,8\) and \(\beta <4c\). And \(J(E^*_3)\) have complex conjugate eigenvalues with unit modulus i.e. \(\mid \Lambda _{1,2}\mid =1\).
The eigenvalues of the Variation matrix J are \(\Lambda _{1,2}=\alpha _1\pm i \alpha _2\) where \(\alpha _1=\dfrac{4-a}{4}\) and \(\alpha _2=\dfrac{1}{4}\sqrt{(8-a)a}\).
The non-degeneracy condition \(\Lambda _{1,2}^j\ne 0 \quad (j=1,2,3,4)\) are satisfied.
For the map (4), at critical parameter value \(c=\dfrac{2\beta }{a}\) then the center manifold form is taken as
And corresponding to both eigenvalues the eigenvectors are as follows
The map (4) is restricted to (14) at value c
where \(d_{NS}\) is a complex number.
The invariance in manifold gives
On collecting the power of \(\nu \) up to third order in (16), it is obtained
where \(\mu ^*=\left( a,\beta ,\dfrac{2\beta }{a}\right) .\)
For reducing the complexity in computation, we consider \(a=3.5\), \(\beta =4.8\) and c as a free parameter. The matrix \(J(E^*_{3})\) gives eigenvalues
As the systems (17)-(19) are non-singular, they have a unique solution.
The solutions of systems can be easily obtained as
Since the system (20) is singular, we use Fredholm’s solvability condition
The value of \(d_{NS}\) is calculated as
For Neimark–Sacker bifurcation the first Lyapunov coefficient gives
In the above calculation the value of u, v are taken as
Since \(C_{NS}<0\), the Neimark–Sacker bifurcation (NSB) is super-critical and a closed invariant curve appears which is stable i.e. both species can fluctuate near critical parameter values and the stable oscillations may appear. \(\square \)
3.2 Codimension-2 bifurcation analysis
This subsection illustrates codim-2 bifurcation analysis along with strong resonances R2(1:2), R3(1:3) and R4(1:4).
3.2.1 1:2 resonance at \(E^*_3\)
Theorem 4
The map (4) exhibits 1:2 resonance bifurcation at fixed point \(E^*_{3}\) for \(a=8\) and \(c=\dfrac{\beta }{4}\).
Proof
At the fixed point \(E^*_{3}\), the corresponding \(J(E^*_{3})\) has two multipliers \(\Lambda _{1,2}=-1\) when \(trace(J(E^*_{3}))=-2\), \(Det(J(E^*_{3}))=1\). It implies that \(a=8\), \(c=\dfrac{\beta }{4}\).
Here we consider the center manifold form of the map (4)
The eigenvectors corresponding to both eigenvalues are
and
where
The map (4) can be restricted as follows:
The invariance condition of the central manifold gives
On collecting power of \(\nu \) up to third order in above expansion (23), we get
The cubic terms of (23) yields
where \(\mu ^*=\left( a=8,\beta ,\dfrac{\beta }{4}\right) .\)
The solvability condition for the singular system (27) is
we get
The singular system (28) has a unique solution if
since
The third-order coefficient can be calculated as
The non-degeneracy conditions of 1:2 resonance bifurcation \(C_1=4C_{R2}\ne 0\) and \(D_1=-2D_{R2}-6C_{R2}\ne 0\) are satisfied. The sign of \(C_1\) indicates the behavior of a fixed point. If \(C_1<0\) then there is occurred Niemark-Sacker bifurcation curve and if \(C_1>0\) then bifurcation is supercritical. The 1:2 resonance bifurcation scenario is determined by the coefficient \(D_1\). \(\square \)
3.2.2 1:3 resonance at \(E^*_3\)
Theorem 5
The system (4) undergoes non-degenerate 1:3 resonance bifurcation at fixed point \(E^*_3\) when \(a=6\) and \(c=\dfrac{\beta }{3}\).
Proof
The eigenvalues of Jacobian matrix \(J(E^*_3)\) are in form of complex conjugate \(e^{\pm \frac{2\pi i}{3}}\) when \(trace(J(E^*_{3}))=1\) and \(Det(J(E^*_{3}))=1\) with \(a=6\), \(c=\dfrac{\beta }{3}\).
Now we consider the center manifold form of a map (4) as
The eigenvectors corresponding to both eigenvalues are
where \(q=\left( \begin{array}{c} -\dfrac{3+i\sqrt{3}}{2\beta }\\ 1\\ \end{array}\right) ,\) \(p=\left( \begin{array}{c} \dfrac{i\beta \sqrt{3}}{6}\\ \dfrac{1+i\sqrt{3}}{2}\\ \end{array}\right) .\)
The map (4) is restricted to the form
The center manifold invariance property requires
We collect quadratic terms of (33) in above expansion, it is obtained
where \(\mu ^*=(a=6,\beta ,c=\dfrac{\beta }{3}).\)
On using the Fredholm condition to the singular system (37), we get
and
Now we collect \(\nu ^2\bar{\nu }\)-terms in (33) which gives
As the system (37) is singular, it can be solved if
We get
The dynamical behavior of the invariant closed curve is determined by
For \(|B_{R3}|\ne 0\) as well as, \(L=\ne 0\) the 1:3 resonance bifurcation indicates that an invariant curve of period three is bifurcated from the fixed point near R3 point. \(\square \)
3.2.3 1:4 resonance at \(E^*_3\)
Theorem 6
The map (4) shows non-degenerate 1:4 resonance bifurcation at fixed point \(E^*_3\) when \(a=4\) and \(c=\dfrac{\beta }{2}\).
Proof
For 1:4 resonance bifurcation, there is an eigenvalue in a pair of complex conjugate \(e^{\pm \frac{\pi }{2}i}\) in corresponding Jacobian matrix \(J(E^*_3)\) when
Now we consider the center manifold form of map (4)
The eigenvectors corresponding to both eigenvalues give
where
We normalize the vector p with respect to q as
The restriction of the map (4) on (39) at parameters c and a is
The invariance condition in the center manifold yields
With the above expansion (41), we can determine \(\zeta \)’s power up to the second order
where \(\mu ^*=(a=4,\beta ,c=\dfrac{\beta }{2}).\)
For getting resonance terms in (41)
The Fredholm solvability conditions of the singular system (45) and (46) give
We have
The 1:4 resonance bifurcation curve is determined by
The coefficient \(A_0\) determines the bifurcation scenario near R4 resonance point on the curve for \(|D_{R4}|\ne 0\). The 1:4 resonance bifurcation demonstrates that both species coexist till order 4 in stable periodic cycles near some critical parametric values. \(\square \)

Bifurcation curve with respect to c

3D bifurcation diagram for both Neimark–Sacker and period-doubling and associated MLE

The Neimark–Sacker bifurcation diagram and and associated MLE
4 Numerical computation
To validate our analytic findings, we use the MATLAB package MATCONTM to demonstrate the dynamical behavior of the map (4) [54, 55].
4.1 Numerical continuation of \(E^*_{3}(x^*{_3},y^*{_3})\)
We compute the fixed point \(E^*_3\). We consider \(a=3.5\), \(\beta =4.8\), and vary c as a bifurcation parameter. MATCONTM generates the following report:


From theorem 2, the map (4) demonstrates a period-doubling bifurcation at positive fixed point \(E^*_3\). By theorem 3, the map (4) shows Neimarck–Sacker bifurcation at \(E^*_3\) when critical parameter \(c=2.742856\). The period-doubling point and Neimark–Sacker point are detected in the MATCONTM report by PD and NS respectively, shown in Fig. 1. Figure 2 shows the 3-dimensional bifurcation diagram of Neimark–Sacker and Period-doubling bifurcations together and associated maximum Lyapunov exponents (MLE) at \(a=3.5\), corresponding to Fig. 1. A Neimark–Sacker bifurcation diagram with respect to c and associated maximum Lyapunov exponents (MLE)is also drawn in Fig. 3 at \(a=3.5\) and \(\beta =4.8\).
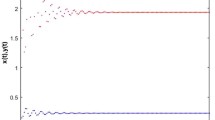
The phase plot diagrams are drawn in Fig. 4 for different values of c corresponding to near NS point, pointed in Fig. 1. If the value \(c=2.741\) then the fixed point \(E^*_3\) is a stable attractor, depicted in Fig. 4a. A closed invariant curve occurs at \(c=2.7428\) in Fig. 4b. After NS point the behavior of the system (4) is drawn in Fig. 4c at \(c=2.751\). Figure 4d shows the breakdown of a closed curve at \(c=2.9\). At \(c=3.0\), a fractal structure appears in Fig. 4e.
Now, we select the PD point in Fig. 1. The MATCONTM gives expression as follows
The statements of MATCONTM for a continuation of 2-cycles are

The continuation of 4-cycle at \(E^*_3\) in fourth iterations:

A cascade of 2-cycles and 4-cycles period doubling curves are drawn in Fig. 5. The corresponding bifurcation diagram is also shown in Fig 6.
4.2 Numerical continuation of codimension-two bifurcation of \(E^*_{3}\)
Here we present codimension-two bifurcation numerically.
We take \(\beta =4.8\) and vary a and c as bifurcation parameters. According to theorem 4, there is a 1:2 resonance point(R2) at \(a=8.0\) and \(c=1.2\), as shown in Fig. 7. The MATCONTM expression is given as

The normal form coefficient(NFC) for R2 is: [C,d] = -8.520711e\(-\)01,-1.704142e+00.
According to theorems 4, 5 and 6, the system (4) undergoes 1:2, 1:3, and 1:4 resonance bifurcations at fixed point \(E^*_{3}\). These resonance bifurcations, detected by R2, R3, and R4, are shown in Fig. 8. The MATCONTM gives

For the same set of parameters, the 1:2 resonance bifurcation diagram corresponding to Fig. 8 is shown in Fig. 9 at \(c=1.2\).

Cascade of PD-points 2-cycles and 4-cycles

Period-doubling bifurcation diagram with respect to c corresponding to fig 5
4.3 Orbits of period 3
We detect the closed region neighborhood of R3 by selecting the R3 point in Fig. 8, a closed invariant curve seems that coexists with an unstable fixed point i.e. the Neimark–Sacker curve, rooted at R3 in the third iteration, is drawn in Fig. 10.

1:2 resonance point detect by R2 emanating from PD point

Neimark–Sacker bifurcation including curve of 1:2 resonance (R2), 1:3 resonance (R3), 1:4 resonance (R4) in (c, a)-space

1:2 Resonance bifurcation diagram

Neimark–Sacker curve of third iteration rooted at R3 bifurcation point in (c, a)-space

1:4 Resonance bifurcation diagram
The 1:4 resonance bifurcation diagram is plotted in Fig. 11 corresponding to Fig. 8. The resonance 1:4 indicates that at the unique fixed point \(E^*_3\), the closed invariant curve loses its smoothness and destroys when the saddle cycle of period-4 appears. The trajectory goes to period 4 orbits followed by chaos.
4.4 Biological interpretation
We studied the complex dynamical behavior of two species discrete-time model (4), in which, the existence and local stability of all fixed points are discussed. The map undergoes codim-1 bifurcation viz., fold bifurcation, flip bifurcation and Neimark–Sacker bifurcation at positive fixed point. These bifurcations mean both species (prey-predator) coexist in the neighborhood of an interior fixed point. Further, we obtained strong resonance bifurcation R2, R3, and R4 at a coexistence fixed point.
Biologically, the occurrence of R2 resonance bifurcation occurs at \(E^*_3\) implies that the discrete model may exhibit Neimark–Sacker, pitchfork, and heteroclinic bifurcation in the neighborhood of fixed points. The 1:3 resonance bifurcation reveals that an invariant curve of period three is bifurcated from the fixed point.
Moreover, the R4 resonance bifurcation demonstrates that both prey and predator coexist till order 4 in stable periodic cycles in the neighborhood of some critical parametric values.
Resonance bifurcation reveals the existence of multiple stable high periodic cycles between prey and predator in the ecosystem. Also, it furnishes a variety of strategies for the long-term coexistence of both species.
5 Conclusion
The two-dimensional continuous-time models show local and global behavior including limit cycles [56,57,58]. A difference equation describes interactions among non-overlapping generations. In this paper, we investigated a predator–prey discrete-time system with a linear functional response. We obtained our discretized model by deploying the piecewise constant argument approach and discussed the local stability around each fixed point. The bifurcations of codimension one and codimension two in the map (4) by using the critical normal form coefficient technique are investigated. The codimension one bifurcation including flip(period-doubling) bifurcation, fold bifurcation and Neimark–Sacker bifurcation (NSB) and codim-2 bifurcations viz. 1:2 resonance, 1:3 resonance and resonance 1:4 are determined. The numerical continuation confirms the dynamics of the system around the fixed point. The occurrence of different types of bifurcations indicates the dynamical behavior of the discrete systems with various complexity from different characteristics. The complex dynamical behavior could be helpful to understand the dynamics of interactive predator and prey systems. For illustration, the appearance of a fold bifurcation implies that a fixed point must exist for all values of a parameter and can never be destroyed i.e. the fixed point may change its stability on varying parametric values. Moreover, the occurrence of flip bifurcation is not desirable in prey-predator models as it may induce a risk of extinction of either prey or predator species. The period-doubling bifurcation indicates that the discrete-time system will vary from a fixed point to a period-2 cycle when the parameter varies. i.e both species (prey and predator) may coexist in period-2 cycles under some conditions. The Neimark–Sacker bifurcation reveals that the dynamic changes from a stable fixed point to attracting cycles including periodic windows and chaotic attractors. Biologically speaking, NSB signifies that both species can fluctuate near critical parameter value and stable fluctuations seem. If \(c_{NS} < 0\) then it will certainly continue.
The model may exhibit flip bifurcation, Neimark–Sacker bifurcation and hetroclinic bifurcation near 1:2 resonance point. The 1:3 resonance bifurcation indicates that an invariant curve of period three is bifurcated from the fixed point.
Moreover, the 1:4 resonance bifurcation demonstrates that both species coexist till order 4 in stable periodic cycles near some critical parametric values. Ecologically, the prey-predator system coexists up to the fourth order in the stable high periodic cycle. The prey and predator population can produce their density and survive mutually. On the invariant curve, the behavior of the fixed point can be quasi-periodic or periodic. However, the investigation of higher codimension bifurcations and chaos control are yet interesting problems. They may be assessed in future studies.
Data availibility
The data used in this research are available/mentioned within the manuscript.
References
Lotka AJ (1925) Elements of physical biology. Williams & Wilkins
Volterra V (1928) Variations and fluctuations in the number of individuals in cohabiting animal species
Du Y, Peng R, Wang M (2009) Effect of a protection zone in the diffusive Leslie predator-prey model. J Differ Equ 246(10):3932–3956
Gakkhar S, Singh A (2012) Control of chaos due to additional predator in the hastings-powell food chain model. J Math Anal Appl 385(1):423–438
Huang J-C, Xiao D-M (2004) Analyses of bifurcations and stability in a predator-prey system with holling type-iv functional response. Acta Math Appl Sin 20(1):167–178
Huang J, Gong Y, Ruan S (2013) Bifurcation analysis in a predator-prey model with constant-yield predator harvesting. Discret Contin Dyn Syst-B 18(8):2101
Din Q (2017) Complexity and chaos control in a discrete-time prey-predator model. Commun Nonlinear Sci Numer Simul 49:113–134
Khan A (2016) Neimark-sacker bifurcation of a two-dimensional discrete-time predator-prey model. Springerplus 5(1):1–10
Singh A, Deolia P (2021) Bifurcation and chaos in a discrete predator-prey model with holling type-iii functional response and harvesting effect. J Biol Syst 1:1–28
Wang J, Cheng H, Liu H, Wang Y (2018) Periodic solution and control optimization of a prey-predator model with two types of harvesting. Adv Differ Equ 2018(1):1–14
Xiao D, Ruan S (2001) Global analysis in a predator-prey system with nonmonotonic functional response. SIAM J Appl Math 61(4):1445–1472
Liu B, Teng Z, Chen L (2006) Analysis of a predator-prey model with holling ii functional response concerning impulsive control strategy. J Comput Appl Math 193(1):347–362
Elabbasy E, Elsadany A, Zhang Y (2014) Bifurcation analysis and chaos in a discrete reduced lorenz system. Appl Math Comput 228:184–194
Singh A, Elsadany AA, Elsonbaty A (2019) Complex dynamics of a discrete fractional-order Leslie–Gower predator-prey model. Math Methods Appl Sci 42(11):3992–4007
Cheng L, Cao H (2016) Bifurcation analysis of a discrete-time ratio-dependent predator-prey model with Allee effect. Commun Nonlinear Sci Numer Simul 38:288–302
He Z, Lai X (2011) Bifurcation and chaotic behavior of a discrete-time predator-prey system. Nonlinear Anal Real World Appl 12(1):403–417
Jing Z, Yang J (2006) Bifurcation and chaos in discrete-time predator-prey system. Chaos Solitons Fract 27(1):259–277
Huang J, Liu S, Ruan S, Xiao D (2018) Bifurcations in a discrete predator-prey model with nonmonotonic functional response. J Math Anal Appl 464(1):201–230
Din Q (2013) Dynamics of a discrete Lotka–Volterra model. Adv Differ Equ 2013(1):1–13
Li L, Wang Z-J (2013) Global stability of periodic solutions for a discrete predator-prey system with functional response. Nonlinear Dyn 72(3):507–516
Liu W, Cai D (2019) Bifurcation, chaos analysis and control in a discrete-time predator-prey system. Adv Differ Equ 2019(1):1–22
Hu Z, Teng Z, Zhang L (2011) Stability and bifurcation analysis of a discrete predator-prey model with nonmonotonic functional response. Nonlinear Anal Real World Appl 12(4):2356–2377
Fan M, Wang K (2002) Periodic solutions of a discrete time nonautonomous ratio-dependent predator-prey system. Math Comput Model 35(9–10):951–961
Din Q (2018) Controlling chaos in a discrete-time prey-predator model with allee effects. Int J Dyn Control 6(2):858–872
Hogarth W, Norbury J, Cunning I, Sommers K (1992) Stability of a predator-prey model with harvesting. Ecol Model 62(1–3):83–106
Smith JM (1968) Mathematical ideas in biology. CUP Archive
Levine SH (1975) Discrete time modeling of ecosystems with applications in environmental enrichment. Math Biosci 24(3–4):307–317
Liu X, Xiao D (2006) Bifurcations in a discrete time Lotka–Volterra predator-prey system. Discret Contin Dyn Syst-B 6(3):559
Hadeler K, Gerstmann I (1990) The discrete Rosenzweig model. Math Biosci 98(1):49–72
Li S, Zhang W (2010) Bifurcations of a discrete prey-predator model with holling type ii functional response. Discret Contin Dyn Syst-B 14(1):159
Agiza H, Elabbasy E, El-Metwally H, Elsadany A (2009) Chaotic dynamics of a discrete prey-predator model with holling type ii. Nonlinear Anal Real World Appl 10(1):116–129
Singh A, Deolia P (2020) Dynamical analysis and chaos control in discrete-time prey-predator model. Commun Nonlinear Sci Numer Simul 90:105313
Murakami K (2007) Stability and bifurcation in a discrete-time predator-prey model. J Differ Equ Appl 13(10):911–925
Yuan L-G, Yang Q-G (2015) Bifurcation, invariant curve and hybrid control in a discrete-time predator-prey system. Appl Math Model 39(8):2345–2362
Xiao D, Li W, Han M (2006) Dynamics in a ratio-dependent predator-prey model with predator harvesting. J Math Anal Appl 324(1):14–29
Elsadany A, Din Q, Salman S (2020) Qualitative properties and bifurcations of discrete-time bazykin-berezovskaya predator-prey model. Int J Biomath 13(06):2050040
Elaydi SN (2007) Discrete chaos: with applications in science and engineering. Chapman and Hall/CRC
Elabbasy E, Agiza H, El-Metwally H, Elsadany A (2007) Bifurcation analysis, chaos and control in the burgers mapping. Int J Nonlinear Sci 4(3):171–185
Kuznetsov YA (1998) Elements of applied bifurcation theory. Appl Math Sci 112:591
Kuznetsov YA, Meijer HG (2005) Numerical normal forms for codim 2 bifurcations of fixed points with at most two critical eigenvalues. SIAM J Sci Comput 26(6):1932–1954
Alidousti J, Eskandari Z, Fardi M, Asadipour M (2021) Codimension two bifurcations of discrete Bonhoeffer-van der Pol oscillator model. Soft Comput 25(7):5261–5276
Eskandari Z, Alidousti J (2020) Stability and codimension 2 bifurcations of a discrete time sir model. J Frankl Inst 357(15):10937–10959
Eskandari Z, Alidousti J (2021) Generalized flip and strong resonances bifurcations of a predator-prey model. Int J Dyn Control 9:275–287
Ghaziani RK, Govaerts W, Sonck C (2012) Resonance and bifurcation in a discrete-time predator-prey system with holling functional response. Nonlinear Anal Real World Appl 13(3):1451–1465
Naik PA, Eskandari Z, Shahraki HE (2021) Flip and generalized flip bifurcations of a two-dimensional discrete-time chemical model. Math Model Numer Simul Appl 1(2):95–101
Eskandari Z, Avazzadeh Z, Ghaziani RK (2023) Theoretical and numerical bifurcation analysis of a predator-prey system with ratio-dependence. Math Sci 1:1–12
Naik PA, Eskandari Z, Yavuz M, Zu J (2022) Complex dynamics of a discrete-time Bazykin–Berezovskaya prey-predator model with a strong Allee effect. J Comput Appl Math 413:114401
Naik PA, Eskandari Z, Avazzadeh Z, Zu J (2022) Multiple bifurcations of a discrete-time prey-predator model with mixed functional response. Int J Bifurc Chaos 32(04):2250050
Huiwang G, Hao W, Wenxin S, Xuemei Z (2000) Functions used in biological models and their influences on simulations
Holling CS (1965) The functional response of predators to prey density and its role in mimicry and population regulation. Memoirs Entomol Soc Canada 97(S45):5–60
Elsadany A, Matouk A (2015) Dynamical behaviors of fractional-order Lotka–Volterra predator-prey model and its discretization. J Appl Math Comput 49(1):269–283
Din Q (2019) Stability, bifurcation analysis and chaos control for a predator-prey system. J Vib Control 25(3):612–626
Lin Y, Din Q, Rafaqat M, Elsadany AA, Zeng Y (2020) Dynamics and chaos control for a discrete-time Lotka–Volterra model. IEEE Access 8:126760–126775
Govaerts W, Ghaziani RK, Kuznetsov YA, Meijer HG (2007) Numerical methods for two-parameter local bifurcation analysis of maps. SIAM J Sci Comput 29(6):2644–2667
Kouznetsov IA, Meijer HGE (2019) Numerical Bifurcation Analysis of Maps: From Theory to Software. Cambridge University Press, Cambridge
May RM, Oster GF (1976) Bifurcations and dynamic complexity in simple ecological models. Am Nat 110(974):573–599
Sáez E, González-Olivares E (1999) Dynamics of a predator-prey model. SIAM J Appl Math 59(5):1867–1878
Liz E (2007) Local stability implies global stability in some one-dimensional discrete single-species models. Discret Contin Dyn Syst-B 7(1):191
Acknowledgements
The authors thank the Editor and anonymous Reviewers for handling this article and providing their helpful comments which significantly improved the scientific contents of the work.
Funding
This study is supported by Core Research Grant, Science Engineering Research Board, Govt. of India (CRG/2021/006380). The work of Vijay Shankar Sharma is supported by the University Grant Commission (UGC), Govt. of India. This study is also supported via funding from Prince Sattam bin Abdulaziz University project number (PASU/2023/R/1444).
Author information
Authors and Affiliations
Contributions
V.S.S. contributed to conceptualization, visualization, software, resources, formal analysis, investigation, and writing—original draft. A.S. performed investigation, supervision, formal analysis, and writing—review and editing. A.E. performed investigation, formal analysis, and writing—review and editing. A.A.E. contributed to conceptualization, visualization, formal analysis, investigation, resources, visualization, and writing—review and editing.
Corresponding author
Ethics declarations
Comnflict of interest
The authors declare that they have no conflict of interest.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Sharma, V.S., Singh, A., Elsonbaty, A. et al. Codimension-one and -two bifurcation analysis of a discrete-time prey-predator model. Int. J. Dynam. Control 11, 2691–2705 (2023). https://doi.org/10.1007/s40435-023-01177-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-023-01177-7