
Abstract
In this work, a novel class of bilateral vibro-impact model is proposed. Unlike the traditional impact model, the energy dissipation of the novel bilateral system is measured by the model of the restitution coefficient dependent with velocity. Then the random vibration of the system is investigated in the presence of Gaussian white noise excitations. The motions of the unperturbed impact system are firstly considered and grouped into two categories. Then, the mean drift and diffusion coefficients of the two kinds of motion are calculated with the stochastic averaging methodology for energy envelope under the assumed condition that the impact vibration system is quasi-conservative. Subsequently, the probability density functions of stationary responses are computed with solving the averaged Fokker-Plank-Kolmogorov equation. Finally, two illustrations are chosen to demonstrate the reliability of the presented technique. And, the validation of analytical results is verified by the simulation data generated by Monte Carlo.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Impact vibration system is a complex nonlinear dynamical system, which has important theoretical and practical significance [1,2,3,4,5]. Assuming that the impact is completed in an instant, the energy dissipation is measured by the restitution coefficient. Early studies suggested that the restitution coefficient was a material dependent constant. On this basis, a great deal of researches has been carried out. Such that the non-smooth coordinate transformation techniques [6,7,8] are introduced, so that the traditional technique, such as stochastic averaging method [9], the path integral approach [10] and the exponential polynomial closure (EPC) method [11,12,13] and the iterative method of weighted residue [14] can be used to investigate impact vibration systems. In addition, Monte Carlo simulation is one of the most commonly methods for calculating the response of stochastic impact vibration systems [15] regardless of computational efficiency and convergence. The method of generalized cell mapping was used by Wang to obtain the random response of impulsive systems [16].
However, many results [17, 18] have showed that taking the restitution coefficient as constant would reduce the accuracy of the calculation. Since then, a great deal of research has been done to modify the restitution coefficient. Johnson [19] derived the expression of the restitution coefficient of the complete plastic impact, which is then supplemented by Stronge [20]. Thornton pointed out the deficiency of Stronge model and built the expression of relative velocity of correlation of restitution coefficient [21]. While the curvature variable was not considered in Thornton's model. Refs. [22,23,24,25,26,27] modified the restitution coefficient model given by Thornton. So many researchers [28, 29] were still dedicated to studying the restitution coefficient to better reflect the energy changes in the impact process, but the existing models are either too complicated to express or cannot be verified by experiments. Recently, Ma [30] has given the modified expression of the restitution coefficient with velocity of impact, and verified it by relevant experiments.
The correction of restitution coefficient provides a new perspective for us to further explore the mechanical properties of vibro-impact system. Especially for the issue of bilateral impact, such a model can better reflect the complex energy dissipation mechanism in impact process. For this reason, a new type of bilateral impact model is developed. Currently, this kind of new bilateral impact model has not been reported. The existing research is still based on constant restitution coefficient to analyze the bilateral impact issues. For example, Dimentberg [7] investigated the response of single-degree-of-freedom (SDOF) impact model driven by random excitation with bilateral and unilateral obstacles respectively. Liu et.al analyzed the random features of a two-sided impact vibration model excited by colored noise [31]. The stochastic dynamic analysis of a Duffing vibration-impact system with two side impact walls was investigated in Refs. [32, 33]. The stochastic dynamics of vibro-impact systems with distribution barriers under additive Gaussian noise excitation were reported in [34]. More recently, Su and his coworkers [35] used the stochastic averaging for energy envelope method to explored the response of the bilateral energy harvesting system.
In this work, the novel type of SDOF biliteral impact model is performed. And the random vibration of this model is analyzed. On the basis of the study of free impact vibration system, the displacement impact condition is converted to the impact condition of energy, and then the free impact vibration system can be divided according to the energy level. With the aid of stochastic averaging method for energy envelope, the mean drift and diffusion coefficients of system is calculated, by assuming that the system is quasi-conservative. The stationary probability density functions (PDFs) of system’s response is calculated by solving the averaged Fokker–Plank–Kolmogorov (FPK) equation in a closed-form. As for illustration, two vibro-impact oscillations are studied, and the precision of the procedure is confirmed by the Monte Carto simulation.
2 Novel type of vibro-impact system with bilateral clearance
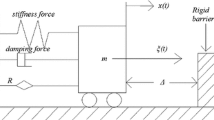
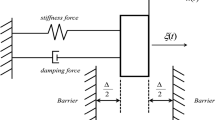
A class of SDOF bilateral impact vibration model driven by random excitations is presented in Fig. 1. Meanwhile, the differential equation of motion reads,
where ε is a parameter of positive; g(X) represents the restoring force of an free vibro-impact system; h(X, \(\dot{X}\)) represents damping force of linear or nonlinear; fk(X,\(\dot{X}\)) are random perturbations; ξk(t) mean Gaussian white noises with correlation functions E[ξk(t) ξl(t + τ)] = 2Dklδ(τ), k, l = 1,2,…,m.

Stochastic vibro-impact system with bilateral clearance
The impact boundary of system (1) is given below:
where \(\dot{X}_{ - }\) and \(\dot{X}_{ + }\) are rebound and impact velocities of the oscillate. The position of impact barrier is X = ± Δ. The coefficient of restitution is presented as a piecewise function according to the magnitude of the impact velocity, i.e.,
in which VC is the critical velocity, which can be understood as the value of the velocity before oscillate enters the elastoplastic phase. e(\(\dot{X}_{ - }\)) is associated with \(\dot{X}_{ - }\), which is constrained by the condition 0 < e(\(\dot{X}_{ - }\)) < 1.
Equation (3) suggests that the value of the restitution coefficient remains at a larger level of unity when velocity of the impact is kept below the critical velocity, which fully reflects exchange of momentum during the elastic collision phase. As velocity of the impact increases, the oscillator enters the elastoplastic impact phase. Obviously, such model is equivalent to Newton restitution coefficient to some extent [36], i.e., e(\(\dot{X}_{ - }\))\(\equiv\) constant value. Recently, Ma et al. [30] considered the correlated energy dissipation due to impact and plastic deformation, and proposed the velocity-dependent restitution coefficient model as follows:
where ω is a parameter associated with the properties of the material and is determined by the relation of \(\dot{X}_{ - }\) > VC = ω6.
3 Free bilateral vibro-impact system
The free bilateral vibro-impact system associated with system (1) takes form,
The total energy is,
where
In the case of X ∈ (− Δ, Δ), the period of free vibration is determined by,
In which A < Δ means the max amplitude of the mass derived by H = G(A). Naturally, system will impact the barrier when H > G(Δ). Now assume that X = Δ is the position where the first impact occurs and the corresponding total energy is,
in which H1- and \(\dot{X}_{1 - }\) represents the energy of total and velocity of the free impact vibration system before impact. Thus, the total energy after impact reads,
By combination of the Eqs. (9) and (10), the energy dissipation during this impact δ1H is derived as,
Similarly, the energy loss during the impact δ2H at the position X = − Δ can be also obtained in the following form:
Note that G(Δ) = G(− Δ). Assuming that quasi-period of the impact is taken as the time interval between two impacts of the oscillator at the same obstacle X = Δ, the total energy dissipation for a quasi-period is presented below,
and the quasi-period can be obtained as follows:
4 Stochastic averaging of energy envelope
Introducing \(\dot{X}\) = Y, the following Itô stochastic differential equations could be derived:
where,
B(t) in the Eq. (15) denotes a unit Weiner process. Taking into account Eq. (15) and with the aid of Itô differential rule, the equations of Itô related to displacement X and energy H of system could be deduced as,
By virtues of Eqs. (18) and (19), the displacement X(t) and energy H(t) are a process of rapidly varying and a process of slow process, respectively. The stochastic averaging technique of energy envelop [37] is feasible. The Itô equation of averaged related to H(t) is yielded as follows:
where \(\overline{m}\)(H) denotes the mean coefficient of drift and \(\overline{\sigma }\)(H) is the mean diffusion coefficient. Note that the motion of the oscillator is grouped into two cases. One is the system will oscillate and impact alternately between the rigid barriers, the other is oscillations without impacts. Therefore, the averaged drift and diffusion coefficient could be calculated in different two cases, respectively.
4.1 Case 1 H < G(Δ)
In this case, the oscillate will be free of impact vibrations. The averaged drift and diffusion coefficients are:
In which A = G−1(H) denotes the value of the amplitude of vibration.
4.2 Case 2 H > G(Δ)
In such case, the system will oscillate and impact alternately between the rigid barriers. The averaged drift and diffusion coefficient can take the following forms after combining with the energy dissipation during one quasi-period,
where δH/T(H) indicates loss of energy during a complete impact cycle.
The Fokker-Plank-Kolmogorov equation corresponding to Eq. (20) reads,
In which p = p(H,t|H0) denotes the transition probability density function of energy under the condition of initial,
and the boundary conditions,
Taking into consideration the boundary condition in Eq. (29), the solution of stationary of Eq. (27) can be calculated analytically,
where C denotes a normalization constant.
The probability density of joint related to the velocity Y and the displacement X is easily deduced as
5 Illustrative Examples
Example 1
The Duffing oscillator is studied. the equation of motion is described by,
where a and b are constant; c represents the coefficient of damping; ξ(t) denotes the Gaussian white noise with intensity 2D.
The total energy of the Eq. (32) is,
In which
The drift and diffusion coefficients of averaged are presented below:
where A = [((a2 + 4bH)0.5 − a)/b]0.5.
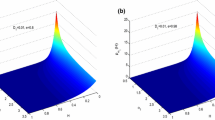
Figures 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 show the numerical results and the direct Monte Carlo simulation’s data of stationary response of Eq. (32). In Fig. 2, the stationary PDFs of energy H for different positions of rigid barrier are presented, respectively. It is seen that the peak value of the stationary PDF of energy of the system decreases with the increase of the rigid barrier position, and the rate of decay of the PDF decreases correspondingly. Furthermore, Figs. 3, 4, 5 demonstrate the corresponding joint PDFs for the velocity Y and displacement X, respectively.

The stationary PDF of energy p(H) of system (32) for different values of the rigid barrier position under D = 0.05 and VC = 0.4. The other parameters are a = 1.0, b = 0.2, c = 0.025. The solid lines denote the numerical results; symbols (●▲■) denote the Monte Carlo simulation of the system

The joint probability density of displacement and velocity of system (32) with Δ = 0.8 under D = 0.05 and VC = 0.4. The other parameters are the same as those in Fig. 2. a denotes the analytical result, and b denotes the Monte Carlo simulation result

The joint probability density of displacement and velocity of system (32) with Δ = 1.0 under D = 0.05 and VC = 0.4. The other parameters are the same as those in Fig. 2. a denotes the analytical result, and b denotes the Monte Carlo simulation result

The joint probability density of displacement and velocity of system (32) with Δ = 1.2 under D = 0.05 and VC = 0.4. The other parameters are the same as those in Fig. 2. a denotes the analytical result, and b denotes the Monte Carlo simulation result

The stationary PDF of energy p(H) of system (32) for different values of yield velocity under D = 0.01 and VC = 0.6. The other parameters are a = 1.0, b = 0.2, c = 0.025. The solid lines denote the numerical results; symbols (●▲■) denote the Monte Carlo simulation of the system

The joint probability density of displacement and velocity of system (32) with VC = 0.05 under D = 0.01 and Δ = 0.6. The other parameters are the same as those in Fig. 6. a denotes the analytical result, and b denotes the Monte Carlo simulation result

The joint probability density of displacement and velocity of system (32) with VC = 0.8 under D = 0.01 and Δ = 0.6. The other parameters are the same as those in Fig. 6. a denotes the analytical result, and b denotes the Monte Carlo simulation result

The joint probability density of displacement and velocity of system (32) with VC = 2.5 under D = 0.01 and Δ = 0.6. The other parameters are the same as those in Fig. 6. a denotes the analytical result, and b denotes the Monte Carlo simulation result

The stationary PDF of energy p(H) of system (32) for different values of noise intensities under Δ = 1.0 and VC = 0.6. The other parameters are a = 1.0, b = 0.2, c = 0.025. The solid lines denote the numerical results; symbols (●▲■) denote the Monte Carlo simulation of the system

The stationary PDF of energy p(H) of system (32) for different values of damping coefficient under Δ = 1.0, VC = 0.05 and D = 0.01. The other parameters are a = 1.0, b = 0.2. The solid lines denote the numerical results; symbols (●▲■) denote the Monte Carlo simulation of the system
Figure 6 demonstrates the influence of the yield velocity on the system. It can be seen that a larger yield velocity VC corresponds to a smaller energy peak, which implies that an increased amount of the energy is dissipated with the increase of yield velocity VC. Similarly, the joint PDFs derived by the presented technique and Monte Carlo simulation results, respectively are also shown, see Figs.7, 8, 9. It is worth pointing out that Figs. 8 and 9 are almost indistinguishable. This means that as the yield velocity increases, the difficulty of system collision will increase so that the system is in the elastic impact stage or no impact occurs.
Moreover, the effect of the excitation intensities on the system is displayed in Fig. 10 and the discussion on the damping coefficient is exhibited in Fig. 11. Finally, it is diverting to note that due to the constraint of the rigid barrier position, the stationary PDFs of energy are both show inflexion points, the position of which are located at H = G(Δ). Since G(Δ) is only related to Δ, the inflexion in Fig. 2 moves to the larger energy H with the increase of Δ.
Example 2
As the second illustration, Duffing-van der pol impact vibration system is considered. The differential equation of motion is written as,
where c1 and c2 represent the coefficient of damping; ξ(t) denotes the Gaussian white noise with intensity 2D. The total energy of the Eq. (39) is the same as those in Eq. (34). The potential energy is the same as Eq. (35).
The mean drift and diffusion coefficients for this example are given below:
The numerical results of stationary response of system (39) are demonstrated in Figs.12, 13, 14, 15, 16. Meanwhile, the direct Monte Carlo simulation result is supplied for examining the reliability of the proposed method. In Figs. 12, 13, 14, the effect of velocity of yield VC, noise intensities D and rigid barrier position Δ onto the PDFs of stationary are examined, respectively. It can be conducted from those figures that there is a good coincidence between the Monte Carlo simulation results and the analytical solutions.

The stationary PDF of energy p(H) of system (39) for different values of yield velocity under Δ = 1.0 and VC = 0.4. The other parameters are a = 1.0, b = 0.2, c1 = − 0.01, c2 = 0.005. The solid lines denote the numerical results; symbols (●▲■) denote the Monte Carlo simulation of the system

The stationary PDF of energy p(H) of system (39) for different values of noise intensities under Δ = 1.0 and VC = 0.4. The other parameters are a = 1.0, b = 0.2, c1 = − 0.01, c2 = 0.005. The solid lines denote the numerical results; symbols (●▲■) denote the Monte Carlo simulation of the system

The stationary PDF of energy p(H) of system (39) for different values of the rigid barrier under VC = 0.4 and D = 0.5. The other parameters are a = 1.0, b = 0.2, c1 = − 0.01, c2 = 0.005. The solid lines denote the numerical results; symbols (●▲■) denote the Monte Carlo simulation of the systemΔ

The analytical joint probability density of displacement and velocity of system (39) with Δ = 3.0 under D = 0.01 and Δ = 0.6. The other parameters are the same as those in Fig. 14

The analytical joint probability density of displacement and velocity of system (39) with Δ = 1.0 under D = 0.01 and Δ = 0.6. The other parameters are the same as those in Fig. 14
As an additional illustration, the PDFs of joint of the velocity y and displacement x from theoretical results are displayed in Figs. 15 and 16 when the rigid barrier at Δ = 3.0 and Δ = 1.0, respectively. In contrast to Figs. 15 and 16, it is clearly observed that the system has no impact when the rigid barrier position is very large, and the PDFs of the system with respect to energy present a complete limit cycle. However, the limit cycle displays incomplete due to the impact of the system as the impact boundary gets closer and closer to the oscillator. According to the definition of stochastic P-bifurcation, the disappearance and appearance of complete limit cycle due to the change of system’s parameter is a stochastic P-bifurcation.
6 Conclusion
In this letter, the random vibration of the novel bilateral model driven by Gaussian white noise excitation is analyzed. By studying the unperturbed vibration system, the motion state of the system is divided into free vibration and impact vibration. The mean drift and diffusion coefficients under two different motion states are obtained by means of the stochastic average method of energy envelope, whereafter the stationary response of the system is calculated by solving the corresponding averaged FPK equation. Two illustrations are given to the effectiveness of the performed technique and the influence of several critical parameters on the system is examined. All numerical results could be conducted that the analytical solution with proposed method is consistent with the direct Monte Carlo simulation data.
Code availability
The code that support the findings of this study are available from the corresponding author upon reasonable request.
References
Dimentberg MF, Iourtchenko DV (1999) Towards incorporating impact losses into random vibration analyses: a model problem. Probabilistic Eng Mech 14:323–328
Ibrahim RA (2009) Vibro-impact dynamics: modeling, mapping and applications. Springer, Berlin
Kecik K, Brzeski P, Perlikowski P (2016) Non-linear dynamics and optimization of a harvester-absorber system. Int J Struct Stab Dyn 17:1740001
Liu WB, Dai HL et al (2017) Suppressing wind-induced oscillations of prismatic structures by dynamic vibration absorbers. Int J Struct Stab Dyn 17:1750056
Pratiknyo YB, Setiawan R, Suweca IW (2019) Experimental and theoretical investigation of combined expansion tube-axial splitting as impact energy absorbers. Int J Struct Stab Dyn 20:2050021
Zhuravlev VF (1976) A method for analyzing vibration-impact systems by means of special functions. Mech Solids 11:23–27
Dimentberg M, Menyailov A (1979) Response of a single-mass vibroimpact system to white-noise random excitation. ZAMM - J Appl Math Mech 59:709–716
Ivanov AP (1994) Impact oscillations: linear theory of stability and bifurcations. J Sound Vib 178:361–378
Xu W, Li C, Yue X, Rong H (2016) Stochastic responses of a vibro-impact system with additive and multiplicative colored noise excitations. Int J Dyn Control 4:393–399
Dimentberg MF, Iourtchenko DV (2004) Random vibrations with impacts: a review. Nonlinear Dyn 36:229–254
Er G-K (1998) An improved closure method for analysis of nonlinear stochastic systems. Nonlinear Dyn 17:285–297
Zhu HT (2015) Stochastic response of a vibro-impact Duffing system under external Poisson impulses. Nonlinear Dyn 82:1001–1013
Zhu HT (2015) Stochastic response of a parametrically excited vibro-impact system with a nonzero offset constraint. Int J Dyn Control 4:180–194
Chen L, Qian J, Zhu H, Sun J (2019) The closed-form stationary probability distribution of the stochastically excited vibro-impact oscillators. J Sound Vib 439:260–270
Yurchenko D, Song L (2006) Numerical investigation of a response probability density function of stochastic vibroimpact systems with inelastic impacts. Int J Non Linear Mech 41:447–455
Wang L, Ma S, Sun C et al (2018) The stochastic response of a class of impact systems calculated by a new strategy based on generalized cell mapping method. J Appl Mech 85:54502
Kecskemethy A, Lüder J (1996) Rigid and elastic approaches for the modeling of collisions with friction in multibody systems. Zeitschrift für Angew Math und Mech 76:243–244
Wang Y, Mason MT (1992) Two-Dimensional Rigid-Body Collisions With Friction. J Appl Mech 59:635
Johnson KL (1985) Contact Mechanics. In: Cambridge, UK: Cambridge University Press
Stronge WJ (1995) Theoretical coefficient of restitution for planar impact of rough elasto-plastic bodies. Am Soc Mech Eng Appl Mech Div AMD 205:351–362
Thornton C (1997) Coefficient of restitution for collinear collisions of elastic-perfectly plastic spheres. J Appl Mech Asme 64:383–386
Mesarovic SD, Fleck NA (1999) Spherical indentation of elastic-plastic solids. Proc Math Phys Eng ences 455:2707–2728
Vu-Quoc L, Zhang X (2000) A normal force-displacement model for contacting spheres accounting for plastic deformation: force-driven formulation. J Appl Mech 67:363–371
Kogut L, Etsion I (2002) Elastic-plastic contact analysis of a sphere and a rigid flat. J Appl Mech 69:657–662
Zhang X, Vu-Quoc L (2002) Modeling the dependence of the coefficient of restitution on the impact velocity in elasto-plastic collisions. Int J Impact Eng 27:317–341
Weir G, Mcgavin P (2008) The coefficient of restitution for the idealized impact of a spherical, nano-scale particle on a rigid plane. Proc R Soc A Math 464:1364–5021
Etsion I, Kligerman Y, Kadin Y (2005) Unloading of an elastic–plastic loaded spherical contact. Int J Solids Struct 42:3716–3729
Kharaz AH, Gorham DA (2000) A study of the restitution coefficient in elastic-plastic impact. Philos Mag Lett 80:549–559
Minamoto H, Kawamura S (2011) Moderately high speed impact of two identical spheres. Int J Impact Eng 38:123–129
Ma D, Liu C (2015) Contact law and coefficient of restitution in elastoplastic spheres. J Appl Mech 82:121006–121015
Liu D, Li J, Meng Y (2019) Probabilistic response analysis for a class of nonlinear vibro-impact oscillator with bilateral constraints under colored noise excitation. Chaos Solitons Fractals 122:179–188
Kumar P, Narayanan S, Gupta S (2016) Bifurcation analysis of a stochastically excited vibro-impact Duffing-Van der Pol oscillator with bilateral rigid barriers. Int J Mech ences 127:103–117
Yang G, Xu W, Gu X, Huang D (2016) Response analysis for a vibroimpact Duffing system with bilateral barriers under external and parametric Gaussian white noises. Chaos Solitons Fractals 87:125–135
Chen L, Zhu H, Sun JQ (2019) Novel method for random vibration analysis of single-degree-of-freedom vibroimpact systems with bilateral barriers. Appl Math Mech 40:1759–1776
Su M, Xu W, Zhang Y, Yang G (2021) Response of a vibro-impact energy harvesting system with bilateral rigid stoppers under Gaussian white noise. Appl Math Model 89:991–1003
Qian J, Chen L (2021) Random vibration of SDOF vibro-impact oscillators with restitution factor related to velocity under wide-band noise excitations. Mech Syst Signal Process 147:107082
Zhu W, Lin YK (1905) stochastic averaging of energy envelope. J Eng Mech 117:1890–1905
Funding
The National Natural Science Foundation of China (No. 11672111, No. 12072118), the Program for New Century Excellent Talents in Fujian Province University, the Natural Science Foundation of Fujian Province of China (No. 2019J01049).
Author information
Authors and Affiliations
Contributions
JQ: Investigation, Data curation, Writing—original draft. LC: Conceptualization, Methodology, Supervision, Project administration. SL: Data Collation, textual corrigendum.
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no conflict of interest.
Availability of data and material
The data and material that support the findings of this study are available from the corresponding author upon reasonable request.
Rights and permissions
About this article

Cite this article
Qian, J., Chen, L. & Liu, S. A new type of bilateral vibro-impact model: random vibration analysis. Int. J. Dynam. Control 9, 829–839 (2021). https://doi.org/10.1007/s40435-021-00759-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-021-00759-7