
Abstract
Elimination of random noise is crucial in seismic data processing. Especially in desert area, field record generally has problems of weak effective reflection wave and strong noise due to its special surface factors. Besides, desert noise has characteristics of low-frequency, non-stationary and non-Gaussian. Thus, it is difficult to separate the effective signal from desert noise in low-frequency band. In order to solve these problems, this paper proposes an iterative low-rank denoising method based on synchrosqueezed wavelet transform (SWT). The algorithm first transforms seismic signal into time–frequency domain by SWT, then the signal is decomposed by iterative low-rank decomposition. Different from a traditional low-rank algorithm, this paper performs an adaptive iterative convergence on low-rank decomposition algorithm. When the error of decomposition reaches the predetermined range, the effective low-rank component is extracted. In the end, the low-rank matrix is converted back to time domain by inverse SWT to achieve the denoising. The results of the synthetic and field records verify the effectiveness of the proposed method so that it can be applied to the denoising of desert seismic data. In addition, the surface waves in real desert seismic record have obvious suppression effects and the advantages of the algorithm are shown in the comparison experiments.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Seismic exploration (Crummett 1986) is one of the most important methods for oil and gas exploration. The field acquisition data contains significant interference noise, covering the effective seismic signal in the procession of exploration due to the complex geological structures and the surface environment. Especially in desert area, desert seismic signal contains significant low-frequency noise, so the effective signal in low-frequency band will be overwhelmed by the noise with large amplitude, which leads to a reduction in the signal-to-noise ratio (SNR). To solve these problems, processing methods should be adopted to improve the SNR to effectively facilitate the extraction of effective signal from seismic data.
In recent years, denoising methods in transform domain (Ma and Zhai 2018; Khajouei and Goudarzi 2018; Gómez and Velis 2018) have gradually failed to meet the needs of high-quality exploration. Some of their threshold methods are not suitable for the complex and uneven noisy signal because there is no suitable single threshold for processing, and some of them are lack of precision in the selection of parameters. In addition, the noise and the effective signal are probably misclassified by a single threshold. Empirical mode decomposition (EMD) (Shang et al. 2018; Gómez and Velis 2016) can adaptively decompose non-stationary signal on one-dimension first, and then select and retain the effective part. Its decomposition effect is affected by the modal component decomposition process. Moreover, modal aliasing often occurs during its decomposition process. If VMD (Li et al. 2018) decomposes too many modes, it will cause signal discontinuity, which is likely to distort the decomposition rules. Low-rank decomposition methods (Anvari et al. 2019; Liang et al. 2018; Zhou et al. 2018) extract low-rank components by shrinking the singular values, but in the case of large noise level, this method will produce more serious artifact, which affects the effectiveness of denoising. As a machine learning method, convolutional neural network (CNN) (Yuan et al. 2018; Zhao et al. 2019; Wang et al. 2019) has become common in research. Especially in the field of classification, the original data can be directly imported into the network for training without pre-processing. However, the training of CNN requires a larger sample size, which adds complexity to the denoising process. In addition, some methods that deal with non-stationary and non-Gaussian seismic signal played an important role in transform domain as well as low-rank decomposition have been widely used in practice. But the low-frequency, non-stationary and other complex characteristics of desert noise make those methods not suitable for desert seismic signal processing (Li et al. 2017; Zhong et al. 2015). To solve these problems, a denoising framework based on iterative low-rank convergence decomposition in transform domain is proposed.
In this paper, the noisy desert seismic signal in time domain is first transformed into time–frequency domain by using SWT (Anvari et al. 2017; Daubechies et al. 2011; Holighaus et al. 2016). SSGoDec (Zhou and Tao 2011) is then performed to decompose the noisy signal in time–frequency domain, and the cyclic condition of iterative convergence is added in the process of decomposition to get the best convergence. Finally, the converged low-rank matrix is converted back to time domain by inverse SWT. This method not only makes up for the shortcomings of the traditional threshold methods but also eliminates the need of a large number of data samples. It only needs adaptive iteration to make the low-rank matrix gradually converge to a given interval. The method effectively combines the accuracy of SWT as well as SSGoDec. The experimental results show that it is suitable for desert seismic signal denoising, especially in the area of surface wave removal.
2 Theory
2.1 Low-rank decomposition
Go Decomposition (GoDec) (Zhou and Tao 2011) decomposes a matrix as follows:
where L represents a low-rank matrix, S is a sparse matrix and G is the approximation error.
GoDec imposes strict constraints on the level of L and the cardinality of S. The noise decomposition and the controllable level of L are accelerated with the help of bilateral random projection (BRP) based on lower order approximation. It is time-consuming that the hard threshold processing of S requires sorting the size of all its entries. Semi-Soft Go Decomposition (SSGoDec) (Zhou and Tao 2013) improves this method by transforming the matrix decomposition into a series of alternative optimizations (Eq. 2).
The above equation can update \(L^{t}\) by the singular value hard threshold of \(X - S^{t - 1}\) and \(S^{t}\) by the soft threshold of \(X - L^{t}\).
where x is the representation of the soft threshold.
According to the low-rank approximation based on BRP (Zhou and Tao 2012), the independent Gauss random matrix is approximated by the fast rank P of X:
where \(Y_{1} \in R^{n \times r}\) and \(Y_{2} \in R^{p \times r}\) are left and right random projections, \(A_{2}\) is the left random mapping matrix. Based on Eq. 4, we can get the final low-rank matrix. The key difference between SSGoDec and GoDec is that the soft threshold processing of S only needs NP subtraction, while the hard threshold processing of the largest item in ordinary GoDec needs to sort NP values. On the basis of accelerating the modeling calculation, this improvement also guarantees that L still has linear convergence.
2.2 Transform domain conversion
Synchrosqueezed wavelet transform (SWT) is a time–frequency representation method improved by Daubechies et al. (2011). Its main idea is to calculate the analyzed speech signal through wavelet transform, and then refocus the calculated divergent ambiguity value. In this paper, SWT is used to map desert seismic data from time domain to time–frequency domain. Comparing with wavelet transform, S transform and short-time Fourier transform, SWT can extract features better in frequency dimension (Bonar and Sacchi 2012).
A detailed theoretical derivation of SWT is given by Daubechies et al. (2011). The signal after SWT can be expressed as:
where the value of \(a_{k}\) satisfies the interval \(\left| {w\left( {a_{k} ,b} \right) - w_{l} } \right| \le \Delta w/2\), \(w_{l}\) is the lth discrete angular frequency, \(a_{k}\) is the kth discrete scale. \(W_{s} \left( {a_{k} ,b} \right)\) is the continuous wavelet transform, \(w_{s} \left( {a,b} \right)\) is the instantaneous frequency after energy concentration.
2.3 Proposed method
In this paper, the desert seismic signal in time domain is first transformed into SWT domain by SWT. In the process of conversion, the desert seismic signal is divided into 36 layers. Then SSGoDec algorithm is performed to decompose the signal on each layer. After the decomposition, the corresponding low-rank matrix, sparse matrix, mean square error and decomposition error (RMSE = error, error = | |X-L-S|/|X|) are obtained. Zhou and Tao (2011) pointed out that the objective value (decomposition error) ∥X-L-S∥2F monotonously decreases and converges to the local minimum. Based on this theory, SSGoDec algorithm is iterated adaptively. In each iteration, the parameter rank is set to different values. When the predetermined condition is reached, the iteration is completed and the final optimal convergence value can be obtained.
In order to verify the effectiveness of the denoising method in this paper, the signal-to-noise ratio (SNR) is used to measure it:
where x(t) is the denoising signal and s(t) is the original signal.
Experiments with different iterations in Table 1 show that the optimal convergence effect can be obtained when the maximum iteration number is set to three. Figure 1 shows the training frame of the proposed method. The main steps of the algorithm are listed as follows:

Training frame of the proposed algorithm
- 1.
The noisy signal in time domain is transformed into time–frequency domain by SWT, the signal is divided into 36 layers.
- 2.
SSGoDec decomposition is applied to each layer in time–frequency domain. Then the corresponding low-rank matrix, sparse matrix, mean square error matrix and decomposition error are obtained.
- 3.
After completing the first low-rank decomposition, the decomposition error is compared with the iteration condition range \({\text{error}} < 0.0100\). If the threshold is not reached, the second iteration is carried out, in which the rank parameter is reduced by one compared with the previous one, and so on. When the threshold is reached, the iteration is stopped and the final low-rank matrix is obtained.
- 4.
The final low-rank matrix is converted back to time domain by the inverse SWT.
3 Experiment results
3.1 Implementations
In the above we proposed a new framework, which is an adaptive iteration of low-rank algorithm. When discussing the selection of the number of iterations, we get the final result through experiments. Only when the maximum number of iterations is set to three, the decomposition error can be minimized (Table 1). To confirm this inference, we simulated a noisy seismic signal (Fig. 2) with main frequencies of 25 Hz and 30 Hz.

Denoising results. Original pure signal, original noisy signal (SNR = − 8.0675 dB), SSGoDec after synchrosqueezed wavelet transform (SNR = 3.0031 dB), Proposed (SNR = 3.5698 dB)
Table 2 shows the results of SSGoDec algorithm in transform domain and the results of adaptive iterative method in transform domain. It can be observed that the experimental results in this paper are superior to the traditional SSGoDec algorithm without iteration when the SNRs are − 3.6305 dB, − 6.1293 dB and − 8.0675 dB, respectively. A more obvious contrast can be seen in Fig. 2. The pure signal and the noisy signal are shown, which is further compared with the results of SSGoDec algorithm and the method in this paper. From the red dotted circles, the valid signal can be seen clearly. The proposed method shows a better noise reduction effect, and the filtered signal is similar to the original one. In the result of SSGoDec after SWT, the amplitude of the signal is greatly attenuated and the noise is not totally removed. Therefore, the denoising method proposed in this paper is more effective.
3.2 Synthetic desert seismic record
In order to verify the denoising effect of the proposed method, we synthesized desert seismic signal which has 50 traces (Fig. 3) and each trace contains 450 points with dominant frequencies of 25 Hz and 30 Hz. The sampling frequency is 512 Hz with an amplitude of 5. The method is applied to the synthetic record for denoising.

Synthetic desert seismic record. a Clean synthetic desert seismic record. b Synthetic desert seismic record with SNR = − 8.0675 dB
The above noisy signal is transformed into time–frequency domain by SWT, each record is divided into 36 layers. Each layer is decomposed by SSGoDec, and then self-adaptive iteration is carried out. The parameter is set to 10 in the first iteration, 9 in the second iteration and 8 in the third iteration. When the error is less than 0.0100, the iteration stops. Otherwise, the next iteration decomposition continues.
For intuitively verifying the effectiveness of the proposed method, a single trace comparison of the denoising method is given in Fig. 4, which is further compared with the pure signal (8th trace in Fig. 3a) and the noisy signal (8th trace in Fig. 3b). The blue line (pure signal) and the red line (denoised signal) are almost overlapped with the signal. The noise is also suppressed more thoroughly, which is basically floating slightly around 0. It is concluded that the proposed method has a good effect on both signal recovery and noise reduction.

Result of single-trace processing
Three more comparisons of synthetic record processing are added to verify the superiority of the proposed method (Fig. 5). The result of wavelet transform in Fig. 5c has an obvious attenuation on the amplitude of signal with remaining noises. The result of SSGoDec low-rank decomposition in time domain as shown in Fig. 5d is better than wavelet transform. Both the recovery of signal and the suppression of noise are much more effective, but the loss of signal is still evident in some places. The denoising result of F-x deconvolution method (Fig. 5e) shows that the signal can basically be recovered, but it also has a large degree of distortion. Figure 5f is the result generated using the proposed method. Both signal recovery and noise suppression are superior to the first three methods. In addition, the SNR of the final result is greatly improved. It can be seen that the proposed algorithm can achieve better denoising effect of desert seismic signal than other methods.

Processing results of synthetic desert seismic record. a Clean synthetic desert seismic record. b Synthetic desert seismic record with SNR = − 8.0675 dB. c Wavelet transform result with SNR = 0.3506 dB. d SSGoDec result with SNR = 2.1174 dB. e F-x deconvolution result with SNR = 2.1081 dB. f Proposed method result with SNR = 3.5698 dB
Figure 6 shows the residual results of synthetic desert seismic record by using four methods in Fig. 5. Figure 6a is the synthetic noise. The residual result of wavelet transform (Fig. 5b) remains a large part of effective signal, which destroys the amplitude preservation of the signal. Figure 6c is the residual result of SSGoDec low-rank method, whose effective signal remains, but the overall denoising effect is better than wavelet transform. The residual result of F-x deconvolution has residue at every effective signal position. In contrast, the proposed algorithm in Fig. 6e just has a minor valid signal being lost. By comparing with Fig. 6a, the residual result of the proposed algorithm and the synthetic noise are very similar. Obviously, the noise in other methods is not completely suppressed. In the following figures (Fig. 6), we also give the f-k spectrum of the residual results (Fig. 6g), which are further compared with the f-k spectrum of synthetic noise (Fig. 6f). In summary, the proposed method not only retains the signal energy better, but also removes the noise effectively.

Residual comparison of synthetic desert seismic record. a Synthetic noise. b Removed noise using wavelet transform. c Removed noise using SSGoDec. d Removed noise using F-x deconvolution. e Removed noise using proposed method. f F-k spectrum of synthetic noise. g F-k spectrum of the removed noise using proposed method
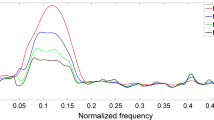
Table 3 gives the comparison of the denoising effect of four methods under different SNRs ranging from − 3.6305 to − 12.1499 dB. The table shows that the SNR of method in this paper is much higher than the other three methods. It can be seen from Fig. 7 that the proposed algorithm fold line is significantly higher than the other three algorithms (especially in the range from − 10 to − 5 dB). In summary, the proposed denoising method can achieve good results both in feasibility and effectiveness in processing synthetic records.

Line chart comparison. The blue line represents wavelet transform, the black line represents SSGoDec, the green line represents F-x deconvolution and the red line represents the proposed method. (Color figure online)
3.3 Real desert seismic record
The real desert seismic record with a total of 200 traces is used to analyze the practical application ability of the proposed framework, as shown in Fig. 8a. SWT divides them into 44 layers. In this case, our maximum iteration number is still set to 3. The parameter RANK in three iterations are set to 16, 15 and 14, respectively. Figure 8 shows the denoising results of the four methods mentioned above. The part of surface wave in Fig. 8b has not been removed and the effect of the signal–noise mixing part is not satisfied. SSGoDec low-rank decomposition method in Fig. 8c cannot achieve acceptable denoising effect, which mainly results from the lack of the effectiveness of surface wave removal. Although the F-x deconvolution method (Fig. 8d) can effectively remove a large area of surface wave, some signal-to-noise aliasing parts show signal distortion. The denoising effect is also not ideal. Figure 8e illustrates the denoising method in this paper. By observing the red boxes, it can be seen that this method can effectively remove surface wave, and recover most of the effective signal without obvious attenuation.

Processing results of real desert seismic record. a Real desert seismic record. b Wavelet transform result. c SSGoDec result. d F-x deconvolution result. e Proposed method result
4 Conclusion
In this paper, a framework of adaptive iteration low-rank decomposition in transform domain is proposed to be used in processing desert seismic signal. Comparing with traditional methods, the proposed algorithm not only layers the noisy signal in time–frequency domain, but also performs adaptive iterative low-rank decomposition for each layer of the signal in each trace. The experiments show that this iteration method can effectively converge the decomposition error to a minimum value. The corresponding low-rank matrix can be converted back to time domain by inverse transformation, which effectively removes the low frequency noise and preserves the signal integrity. Comparing with the wavelet transform, SSGoDec and F-x deconvolution, the proposed method successfully demonstrates its advantages in denoising, especially in removing the surface wave in the real desert seismic record. The results have shown that this method can be effectively applied to desert seismic signal denoising, yet very few research has applied similar methods. In future works, more improvements and experiments of different low-rank decomposition methods in transform domain which do not depend on the selection of iteration times will be proposed.
References
Anvari R, Siahsar MAN, Gholtashi S, Roshandel Kahoo A, Mohammadi M (2017) Seismic random noise attenuation using synchrosqueezed wavelet transform and low-rank signal matrix approximation. IEEE Trans Geosci Remote Sens 55(11):6574–6581. https://doi.org/10.1109/tgrs.2017.2730228
Anvari R, Mohammadi M, Kahoo AR (2019) Enhancing 3-D seismic data using the t-SVD and optimal shrinkage of singular value. IEEE J Sel Top Appl Earth Obs Remote Sens 12(1):382–388. https://doi.org/10.1109/jstars.2018.2883404
Bonar D, Sacchi M (2012) Denoising seismic data using the nonlocal means algorithm. Geophysics 77(1):A5–A8
Crummett WP (1986) Seismic exploration. Phys Teach 24(8):462. https://doi.org/10.1119/1.2342095
Daubechies I, Lu J, Wu H (2011) Synchrosqueezed wavelet transforms: an empirical mode decomposition-like tool. Appl Comput Harmon Anal 30(2):243–261. https://doi.org/10.1016/j.acha.2010.08.002
Gómez JL, Velis DR (2016) A simple method inspired by empirical mode decomposition for denoising seismic data. Geophysics 81(6):V403–V413. https://doi.org/10.1190/geo2015-0566.1
Gómez JL, Velis DR (2018) Edge-preserving frequency-offset denoising of seismic data. Geophysics 83(5):V293–V303. https://doi.org/10.1190/geo2017-0373.1
Holighaus N, Průša Z, Søndergaard PL (2016) Reassignment and synchrosqueezing for general time–frequency filter banks, subsampling and processing. Sig Process 125:1–8. https://doi.org/10.1016/j.sigpro.2016.01.007
Khajouei MA, Goudarzi A (2018) UDWT domain: a verified replacement for time domain implementation of the robust P phase picker algorithm. IEEE J Sel Top Appl Earth Obs Remote Sens 11(10):3918–3924. https://doi.org/10.1109/jstars.2018.2868899
Li G, Li Y, Yang B (2017) Seismic exploration random noise on land: modeling and application to noise suppression. IEEE Trans Geosci Remote Sens 55(8):4668–4681. https://doi.org/10.1109/tgrs.2017.2697444
Li F, Zhang B, Verma S, Marfurt KJ (2018) Seismic signal denoising using thresholded variational mode decomposition. Explor Geophys 49(4):450–461. https://doi.org/10.1071/eg17004
Liang X, Li Y, Zhang C (2018) Noise suppression for microseismic data by non-subsampled shearlet transform based on singular value decomposition: suppressing noise for microseismic data. Geophys Prospect 66(5):894–903. https://doi.org/10.1111/1365-2478.12576
Ma Y, Zhai M (2018) Random noise suppression algorithm for seismic signals based on principal component analysis. Wireless Pers Commun 102(2):653–665. https://doi.org/10.1007/s11277-017-5081-7
Shang X, Li X, Morales-Esteban A, Dong L (2018) Enhancing micro-seismic P-phase arrival picking: EMD-cosine function-based denoising with an application to the AIC picker. J Appl Geophys 150:325–337. https://doi.org/10.1016/j.jappgeo.2017.09.012
Wang Y, Lu W, Liu J, Zhang M, Miao Y (2019) Random seismic noise attenuation based on data augmentation and CNN. Chin J Geophys Chin Ed 62(1):421–433. https://doi.org/10.6038/cjg2019m0385
Yuan S, Liu J, Wang S, Wang T, Shi P (2018) Seismic waveform classification and first-break picking using convolution neural networks. IEEE Geosci Remote Sens Lett 15(2):272–276. https://doi.org/10.1109/lgrs.2017.2785834
Zhao Y, Li Y, Dong X, Yang B (2019) Low-frequency noise suppression method based on improved DnCNN in desert seismic data. IEEE Geosci Remote Sens Lett 16(5):811–815. https://doi.org/10.1109/lgrs.2018.2882058
Zhong T, Li Y, Wu N, Nie P, Yang B (2015) A study on the stationarity and gaussianity of the background noise in land-seismic prospecting. Geophysics 80(4):V67–V82. https://doi.org/10.1190/geo2014-0153.1
Zhou T, Tao D (2011) GoDec: randomized low-rank and sparse matrix decomposition in noisy case. Paper presented at the 33–40
Zhou T, Tao D (2012) Bilateral random projections. Paper presented at the 1286–1290. https://doi.org/10.1109/isit.2012.6283064
Zhou T, Tao D (2013) Shifted subspaces tracking on sparse outlier for motion segmentation. Paper presented at the 1946–1952
Zhou Y, Li S, Zhang D, Chen Y (2018) Seismic noise attenuation using an online subspace tracking algorithm. Geophys J Int 212(2):1072–1097. https://doi.org/10.1093/gji/ggx422
Acknowledgements
This work was financially supported by the National Natural Science Foundations of China under Grants 41730422.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Sun, X., Li, Y. Application of adaptive iterative low-rank algorithm based on transform domain in desert seismic signal analysis. Acta Geod Geophys 55, 151–162 (2020). https://doi.org/10.1007/s40328-020-00287-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40328-020-00287-4