
Abstract
The purpose of this paper is to study and analyze a new projection-type algorithm for solving pseudomonotone variational inequality problems in real Hilbert spaces. The advantage of the proposed algorithm is the strong convergence proved without assuming Lipschitz continuity of the associated mapping. In addition, the proposed algorithm uses only two projections onto the feasible set in each iteration. The numerical behaviors of the proposed algorithm on a test problem are illustrated and compared with several previously known algorithms.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
We consider the following variational inequality problem (VI) of finding a point \(x^*\in C\) such that
where C is a nonempty closed convex subset in a real Hilbert space H, \(A: H\rightarrow H\) is a single-valued mapping, and \(\langle \cdot ,\cdot \rangle \) and \(\Vert \cdot \Vert \) are the inner product and the norm in H, respectively.
Let us denote the solution set of VI (1) by VI(C, A). Variational inequality problems are fundamental in a broad range of mathematical and applied sciences; the theoretical and algorithmic foundations as well as the applications of variational inequality problems have been extensively studied in the literature and continue to attract intensive research. For the current state of the art in the finite dimensional setting, see for instance (Facchinei and Pang 2003; Konnov 2001) and the extensive list of references therein.
Many authors have proposed and analyzed several iterative methods for solving the variational inequality (1). The simplest one is the following projection method, which can be seen as an extension of the projected gradient method for optimization problems:
for each \(n\ge 1\), where \(P_C\) denotes the metric projection from H onto C. Convergence results for this method require some monotonicity properties of A. This method converges under quite strong hypotheses. If A is Lipschitz continuous with Lipschitz constant L and \(\alpha \)-strongly monotone, then the sequence generated by (2) converges to an element of VI(C, A), if \( \tau \in \left( 0, \dfrac{2\alpha }{L^2}\right) \).
To deal with the weakness of the method defined by (2). Korpelevich 1976 (also independently by Antipin (1976)) proposed the extragradient method in the finite dimensional Euclidean space \({\mathbb {R}}^m\) for a monotone and L-Lipschitz continuous operator \(A: {\mathbb {R}}^m\rightarrow {\mathbb {R}}^m\). The algorithm is of the following form:
where \(\tau _n \in \left( 0,\dfrac{1}{L}\right) \). The sequence \(\{x_n\}\) generated by (3) converges to an element of VI(C, A) provided that VI(C, A) is nonempty.
In recent years, the extragradient method was further extended to infinite-dimensional spaces in various ways, see, e.g. (Censor et al. 2011a, b, c; Bello Cruz and Iusem 2009, 2010, 2012, 2015; Bello Cruz et al. 2019; Gibali et al. 2019; Kanzow and Shehu 2018; Konnov 1997, 1998; Maingé and Gobinddass 2016; Malitsky 2015; Thong and Hieu 2018, 2019; Thong et al. 2019c; Thong and Vuong 2019; Thong and Gibali 2019a, b; Thong et al. 2019a, b; Vuong 2018) and the references therein.
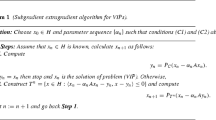
Note that, when A is not Lipschitz continuous or the constant L is very difficult to compute, the method of Korpelevich is not applicable (or possible to use) because we cannot determine the step-size \(\tau _n\). To overcome this obstacle, Iusem (1994) proposed an iterative algorithm in the finite dimensional Euclidean space \({\mathbb {R}}^m\) for VI(C, A) as follows:
Algorithm 1.1

It is worth noting that this modification allows the author to prove convergence without Lipschitz continuity of the operator A.
Algorithm 1.1 may require many iterations in the iterative procedure used to select the stepsize \(\gamma _n\) and each iterations uses a new projections. This may lead to a large computational effort that should be avoided.
Motivated by this idea, Iusem and Svaiter (1997) proposed a modified extragradient method for solving monotone variational inequalities which requires only two projections onto C at each iteration. Few years later, this method was improved by Solodov and Svaiter (1999). They introduced an algorithm for solving (1) in finite-dimensional spaces. In fact, the method in Solodov and Svaiter (1999) can solve a more general case where A is only continuous and satisfies the following condition:
The property (5) holds if A is monotone or more generally pseudomonotone on C in the sense of Karamardian (1976). Very recently, Vuong and Shehu (2019) modified result of Solodov and Svaiter to obtain strong convergence in infinite dimensional real Hilbert spaces. They constructed the algorithm based on Halpern method (Halpern 1967) and method of Solodov and Svaiter. The algorithm is of the following form:
Algorithm 1.2

They proved that if \(A:H\rightarrow H\) is a pseudomonotone, uniformly continuous and sequentially weakly continuous on bounded subsets of C and the sequence \(\{\alpha _n\}\) satisfies the conditions \(\lim _{n\rightarrow \infty }\alpha _n=0\) and \(\sum _{n=1}^\infty \alpha _n=\infty \), then the sequence \(\{x_n\}\) generated by Algorithm 1.2 converges strongly to \(p\in VI(C,A)\), where \(p=P_{C}x_1.\) Note that when \(\alpha _n=0 \ \forall n\) then Algorithm 1.2 reduces to the algorithm of Solodov and Svaiter.
Motivated and inspired by the works in Moudafi (2000), Solodov and Svaiter (1999) and Vuong and Shehu (2019), and by the ongoing research in these directions, in this paper we introduce a modification of the algorithm proposed by Solodov and Svaiter for solving variational inequalities with uniformly continuous pseudomonotone operator. The main modification is to use a different Armijo-type line search to obtain a hyperplane strictly separating current iterate from the solutions of the variational inequalities.
The paper is organized as follows: We first recall some basic definitions and results in Sect. 2. Our algorithm is presented and analyzed in Sect. 3. In Sect. 4 we present some numerical experiments which demonstrate the proposed algorithm performances as well as provide a preliminary computational overview by comparing it with some related algorithms.
2 Preliminaries
Let H be a real Hilbert space and C be a nonempty, closed and convex subset of H. The weak convergence of \(\{x_n\}_{n=1}^{\infty }\) to x is denoted by \(x_{n}\rightharpoonup x\) as \(n\rightarrow \infty \), while the strong convergence of \(\{x_n\}_{n=1}^{\infty }\) to x is written as \(x_n\rightarrow x\) as \(n\rightarrow \infty .\) For each \(x,y\in H\), we have
Definition 2.1
Let \(T:H\rightarrow H\) be an operator. Then
- 1.
The operator T is called L-Lipschitz continuous with \(L>0\) if
$$\begin{aligned} \Vert Tx-Ty\Vert \le L \Vert x-y\Vert \ \ \ \forall x,y \in H. \end{aligned}$$if \(L=1\) then the operator T is called nonexpansive and if \(L\in (0,1)\), T is called contraction.
- 2.
T is called monotone if
$$\begin{aligned} \langle Tx-Ty,x-y \rangle \ge 0 \ \ \ \forall x,y \in H. \end{aligned}$$ - 3.
T is called pseudomonotone if
$$\begin{aligned} \langle Tx,y-x \rangle \ge 0 \Longrightarrow \langle Ty,y-x \rangle \ge 0 \ \ \ \forall x,y \in H. \end{aligned}$$ - 4.
T is called \(\alpha \)-strongly monotone if there exists a constant \(\alpha >0\) such that
$$\begin{aligned} \langle Tx-Ty,x-y\rangle \ge \alpha \Vert x-y\Vert ^2 \ \ \forall x,y\in H. \end{aligned}$$ - 5.
The operator T is called sequentially weakly continuous if for each sequence \(\{x_n\}\) we have: \(x_n\) converges weakly to x implies \({Tx_n}\) converges weakly to Tx.
It is easy to see that every monotone operator is pseudomonotone but the converse is not true.
We next present an academic example of a variational inequality problem (VI) in infinite dimensional Hilbert spaces where the cost function A is pseudomonotone, uniformly continuous and sequentially weakly continuous, but A fails to be Lipschitz continuous on H.
Example 1
Consider the Hilbert space
equipped with the inner product and induced norm on H:
for any \(u=(u_1,u_2,\ldots ,u_i,\ldots ), v=(v_1,v_2,\ldots ,v_i,\ldots )\in H.\)
Consider the set and the mapping:
With this C and A, it is easy to see that \(VI(C,A)\ne \emptyset \) since \(0\in VI(C,A)\) and moreover, A is pseudomonotone, uniformly continuous and sequentially weakly continuous on C, but A fails to be Lipschitz continuous on H.
Now let \(u,v\in C\) be such that \(\langle Au,v-u\rangle \ge 0\). This implies that \(\langle u,v-u\rangle \ge 0\). Consequently,
meaning that A is pseudomonotone. Now, since C is compact, the mapping A is uniformly continuous on C and A is sequentially weakly continuous on C.
Finally, we show that A is not Lipschitz continuous on H. Assume to the contrary that A is Lipschitz continuous on H, i.e., there exists \(L>0\) such that
Let \(u=(L,0,\ldots ,0,\ldots )\) and \(v=(0,0,\ldots ,0,\ldots )\), then
Thus, \(\Vert Au-Av\Vert \le L\Vert u-v\Vert \) is equivalent to
equivalently
this leads to a contradiction and thus A is not Lipschitz continuous on H.
For every point \(x\in H\), there exists a unique nearest point in C, denoted by \(P_Cx\) such that \(\Vert x-P_Cx\Vert \le \Vert x-y\Vert \ \forall y\in C\). \(P_C\) is called the metric projection of H onto C. It is known that \(P_C\) is nonexpansive.
Lemma 2.1
(Goebel and Reich 1984) Let C be a nonempty closed convex subset of a real Hilbert space H. Given \(x\in H\) and \(z\in C\). Then \(z=P_Cx\Longleftrightarrow \langle x-z,z-y\rangle \ge 0 \ \ \forall y\in C.\)
Lemma 2.2
(Goebel and Reich 1984) Let C be a closed and convex subset in a real Hilbert space H, \(x\in H\). Then
- (i):
\(\Vert P_Cx-P_Cy\Vert ^2\le \langle P_C x-P_C y,x-y\rangle \ \forall y\in H\);
- (ii):
\(\Vert P_C x-y\Vert ^2\le \Vert x-y\Vert ^2-\Vert x-P_Cx\Vert ^2 \ \forall y\in C;\)
- (iii):
\(\langle (I-P_C)x-(I-P_C)y,x-y\rangle \ge \Vert (I-P_C)x-(I-P_C)y\Vert ^2 \ \forall y\in H.\)
For properties of the metric projection, the interested reader could be referred to Sect. 3 in Goebel and Reich (1984) and Chapter 4 in Cegielski (2012).
The following Lemmas are useful for the convergence of our proposed method.
Lemma 2.3
(Iusem and Garciga 2001) Let \(H_1\) and \(H_2\) be two real Hilbert spaces. Suppose \(A : H_1 \rightarrow H_2\) is uniformly continuous on bounded subsets of \(H_1\) and M is a bounded subset of \(H_1\). Then A(M) is bounded.
Lemma 2.4
(Cottle and Yao 1992, Lemma 2.1) Consider the problem VI(C, A) with C being a nonempty, closed, convex subset of a real Hilbert space H and \(A : C \rightarrow H\) being pseudomonotone and continuous. Then, \(x^*\) is a solution of VI(C, A) if and only if
Lemma 2.5
(He 2006) Let C be a nonempty closed and convex subset of a real Hilbert space H. Let h be a real-valued function on H and define \( K := \{x \in C: h(x) \le 0\}\). If K is nonempty and h is Lipschitz continuous on C with modulus \(\theta > 0\), then
where \(\mathrm{dist}(x, K)\) denotes the distance function from x to K.
Lemma 2.6
(Maingé 2008) Let \(\{a_n\}\) be a sequence of nonnegative real numbers such that there exists a subsequence \(\{a_{n_i}\}\) of \(\{a_n\}\) such that \(a_{n_{i}}<a_{n_{i}+1}\) for all \(i\in {\mathbb {N}}\). Then there exists a nondecreasing sequence \(\{m_k\}\) of \({\mathbb {N}}\) such that \(\lim _{k\rightarrow \infty }m_k=\infty \) and the following properties are satisfied by all (sufficiently large) number \(k\in {\mathbb {N}}\):
In fact, \(m_k\) is the largest number n in the set \(\{1,2,\ldots ,k\}\) such that \(a_n<a_{n+1}\).
Lemma 2.7
(Xu 2002) Let \(\{a_n\}\) be a sequence of nonnegative real numbers such that:
where \(\{\alpha _n\}\subset (0,1)\) and \(\{b_n\}\) is a sequence such that
- a):
\(\sum _{n=0}^\infty \alpha _n=\infty \);
- b):
\(\limsup _{n\rightarrow \infty }b_n\le 0.\)
Then \(\lim _{n\rightarrow \infty }a_n=0.\)
3 Main results
In this section we introduce a new modified method of Solodov and Svaiter for solving (1), and the following conditions are assumed for the convergence of the proposed method:
Condition 1
The feasible set C is a nonempty, closed, and convex subset of the real Hilbert space H.
Condition 2
The VI (1) associated operator \(A:H\rightarrow H\) is a pseudomonotone, uniformly continuous and sequentially weakly continuous on bounded subsets of C.
Condition 3
The solution set of the VI (1) is nonempty, that is \(VI(C,A)\ne \emptyset \).
Condition 4
We assume that \(f:C\rightarrow C\) is a contractive mapping with a coefficient \(\rho \in [0,1)\), and we add the following condition
Condition 5
Let \(\{\alpha _n\}\) be a real sequences in (0, 1) such that
Algorithm 3.3

Now let us compare the above algorithm with Algorithm 1.2. In the step of the Armijo-type linesearch, the above algorithm uses a different procedure which replaces the one described in (6) as follows:
where \(\mu >0\) and \(\lambda \in \left( 0,\dfrac{1}{\mu }\right) \). Unlike (6), which requires \(\mu \in (0,1)\) and \(\lambda =1\). Such choices are crucial for the convergence analysis in Solodov and Svaiter (1999) and Vuong and Shehu (2019), while the parameter \(\mu \) in our algorithm can take any positive scalar. In addition, we use viscosity techniques to solve this problem, which increases the speed of the proposed algorithm (see our numerical experiments). So our algorithm can be applied more conveniently in practice.
Remark 3.1
It is easy to see that \(x_n,y_n,z_n\) in Algorithm 3.3 belong to C.
We start the analysis of the algorithm’s convergence by proving some Lemmas.
Lemma 3.8
Assume that Conditions 1–2 hold. The Armijo-line search rule (7) is well defined.
Proof
Since \(l\in (0,1)\) and A is continuous on C hence \(\langle Ax_n-A(x_n- l^j r_\lambda (x_n)), r_\lambda (x_n)\rangle \) converges to zero as j tends to infinite. On the other hand, as a consequence of Step 1, \(\Vert r_\lambda (x_n)\Vert >0\) (otherwise, the procedure stops). Therefore, there exists a non-negative integer \(j_n\) satisfying (7). \(\square \)
Lemma 3.9
Assume that \(\{x_n\}\) is generated by Algorithm 3.3; then we have
Proof
By the projection property we have \(\Vert x-P_Cy\Vert ^2\le \langle x-y,x-P_Cy\rangle \) for all \(x\in C\) and \(y\in H\). Let \(y=x_n-\lambda Ax_n, x=x_n\); then
thus
\(\square \)
Lemma 3.10
Assume that Conditions 1–3 hold. Let \(x^*\) be a solution of problem (1) and the function \(h_n\) be defined by (8). Then \(h_n (x^*)\le 0\) and \( h_n (x_n)\ge \tau _n \left( \dfrac{1}{\lambda }-\mu \right) \Vert r_\lambda (x_n)\Vert ^2\). In particular, if \(r_\lambda (x_n)\ne 0\) then \(h_n(x_n)>0.\)
Proof
Since \(x^*\) is a solution of problem (1), by Lemma 2.4 we have \(h_n(x^*)=\langle Ay_n,x^*-y_n\rangle \le 0.\) The first claim of Lemma 3.10 is proved. Now, we prove the second claim. We have
On the other hand, from (7) we have
thus
Using Lemma 3.9 we get
\(\square \)
Remark 3.2
From Lemma 3.10 we have \(C_n\ne \emptyset \).
Lemma 3.11
Assume that Conditions 1–3 hold. Let \(\{x_n\}\) be a sequence generated by Algorithm 3.3. If there exists a subsequence \(\{x_{n_k}\}\) of \(\{x_n\}\) such that \(\{x_{n_k}\}\) converges weakly to \(z\in C\) and \(\lim _{k\rightarrow \infty }\Vert x_{n_k}-z_{n_k}\Vert =0\) then \(z\in VI(C,A).\)
Proof
We have \(z_{n_k}=P_C(x_{n_k}-Ax_{n_k})\) thus,
or equivalently
This implies that
Taking \(k\rightarrow \infty \) in (11) since \(\Vert x_{n_k}-z_{n_k}\Vert \rightarrow 0\) and \(\{Ax_{n_k}\}\) is bounded, we get
Let us choose a sequence \(\{\epsilon _k\}_k\) of positive numbers decreasing and tending to 0. For each \(\epsilon _k\), we denote by \(N_k\) the smallest positive integer such that
where the existence of \(N_k\) follows from (12). Since \(\left\{ \epsilon _k \right\} \) is decreasing, it is clear that the sequence \( \left\{ N_k \right\} \) is increasing. Furthermore, for each k, \(Ax_{N_k} \not = 0\) and, setting
we have \( \left\langle Ax_{N_k},v_{N_k} \right\rangle =1\) for each k. Now we can deduce from (13) that for each k
and, since A is pseudomonotone on H, that
On the other hand, we have that \(\left\{ x_{n_k} \right\} \) converges weakly to z when \(k \rightarrow \infty \). By the fact that A is sequentially weakly continuous on C, we have that \(\left\{ Ax_{n_k} \right\} \) converges weakly to Az. We assume that \(Az \not = 0\) (otherwise, z is a solution). By the sequentially weakly lower semicontinuity of norm, we get
Since \(\left\{ x_{N_k} \right\} \subset \left\{ x_{n_k} \right\} \) and \(\epsilon _k \rightarrow 0\) as \(k \rightarrow \infty \), we obtain
which implies that \(\lim _{k \rightarrow \infty } \Vert \epsilon _k v_{N_k}\Vert =0\). Hence, taking the limit as \(k \rightarrow \infty \) in (14), we obtain
By Lemma 2.4 we obtain \(z\in VI(C,A).\)\(\square \)
Theorem 3.1
Assume that Conditions 1–5 hold. Then any sequence \(\{x_n\}\) generated by Algorithm 3.3 converges strongly to \(p\in VI(C,A)\), where \(p=P_{VI(C,A)}\circ f(p).\)
Proof
Claim 1. The sequence \(\{x_n\}\) is bounded. Indeed, let \(w_n=P_{C_n}x_n\). Since \(p\in C_n\) we have
This implies that
Using (16) we have
Thus, the sequence \(\{x_n\}\) is bounded. Consequently, the sequences \(\{y_n\}, \{f(x_n)\}, \{Ay_n\}\) are bounded.
Claim 2.
We have
On the other hand, we have
Substituting (18) into (17) we get
This implies that
Claim 3.
We first prove that
Since \(\{Ay_n\}\) is bounded, there exists \(L>0\) such that \(\Vert Ay_n\Vert \le L\) for all n. Using this fact, we have for all \(u, v\in C_n\) that
This implies that \(h_n (\cdot )\) is L-Lipschitz continuous on \(C_n\). By Lemma 2.5 we obtain
which, together with Lemma 3.10 we get
Combining (15) and (20) we obtain
Now, we prove Claim 3. From the definition of the sequence \(\{x_n\}\) and (19) we obtain
This implies that
Claim 4.
We have
Claim 5. The sequence \(\{\Vert x_n-p\Vert ^2\}\) converges to zero by considering two possible cases on the sequence \(\{\Vert x_n-p\Vert ^2\}\).
Case 1: There exists an \(N\in {\mathbb N}\) such that \(\Vert x_{n+1}-p\Vert ^2\le \Vert x_n-p\Vert ^2\) for all \(n\ge N.\) This implies that \(\lim _{n\rightarrow \infty }\Vert x_n-p\Vert ^2\) exists. It implies from Claim 2 that
Since the sequence \(\{x_n\}\) is bounded, it implies that there exists a subsequence \(\{x_{n_k}\}\) of \(\{x_n\}\) that converges weakly to some \(z\in C\) such that
Now, according to Claim 3
This follows that
Now, we prove that
We first consider the case \(\liminf _{k\rightarrow \infty }\tau _{n_k}>0\). In this case, there is a constant \(\tau >0\) such that \(\tau _{n_k}\ge \tau >0\) for all \(k\in {\mathbb {N}}\). We have
Combining (22) and (24) we obtain
Second, we consider the case \(\liminf _{k\rightarrow }\tau _{n_k}=0 \). In this case, we take a subsequence \(\{n_{k_j}\}\) of \(\{n_k\}\) if necessary, we assume without loss of generality that
and
Let \(y_k=\dfrac{1}{l}\tau _{n_k} z_{n_k}+\left( 1-\dfrac{1}{l}\tau _{n_k}\right) x_{n_k}\). Using (25), we have
From the step size rule (6) and the definition of \(y_{k}\) we have
Since A is uniformly continuous on bounded subsets of C and using (27) it implies that
Combining (28) and (29) we obtain
This is a contraction to (26). Therefore, the limit (23) is proved.
Since \(x_{n_k}\rightharpoonup z\) and (23), Lemma 3.11 shows that \(z\in VI(C,A).\)
On the other hand,
Thus
Since \(p=P_{VI(C,A)}f(p)\) and \(x_{n_k} \rightharpoonup z\in VI(C,A)\) we get
This implies that
which, together with Claim 4, implies from Lemma 2.7 that
Case 2: There exists a subsequence \(\{\Vert x_{n_j}-p\Vert ^2\}\) of \(\{\Vert x_{n}-p\Vert ^2\}\) such that \(\Vert x_{n_j}-p\Vert ^2 < \Vert x_{n_j+1}-p\Vert ^2\) for all \(j\in {\mathbb {N}}\). In this case, it follows from Lemma 2.6 that there exists a nondecreasing sequence \(\{m_k\}\) of \({\mathbb {N}}\) such that \(\lim _{k\rightarrow \infty }m_k=\infty \) and the following inequalities hold for all \(k\in {\mathbb {N}}\):
According to Claim 2 we have
According to Claim 3 we have
Using the same arguments as in the proof of Case 1, we obtain
and
Since (21) we get
which, together with (30), implies that
Therefore, \(\limsup _{k\rightarrow \infty }\Vert x_k-p\Vert \le 0\), that is \(x_k \rightarrow p\). The proof is completed. \(\square \)
4 Numerical illustrations
In this section, we discuss the numerical behavior of our proposed Algorithm 3.3 using different test examples and compare our method with method (1.2). In all the examples, we take \(\alpha _{n}=1/(n+1)\) and some choices of \(\mu \), \(\lambda \) and l.
Example 2
We take a classical example (see, e.g., Maingé and Gobinddass 2016) for which the usual gradient method does not converge to a solution of the variational inequality. Here, the feasible set is \(C:={\mathbb {R}}^m\) (for some positive even integer m) and \(A:=(a_{ij})_{1\le i,j\le m}\) is the square matrix \(m \times m\) whose terms are given by
It is clear that the zero vector \(z = (0,\ldots ,0)\) is the solution of this test example. Let \(x_{1}\) be the initial point whose element is randomly chosen in the closed interval \([-1,1]\). We terminate the iterations if \(\Vert x_{n}-z_n\Vert _2\le \varepsilon \) with \(\varepsilon =10^{-4}\). The results are listed in Table 1 below. We consider different values of m.
We next consider some model in infinite dimensional Hilbert spaces in the following example:
Example 3
Consider \(C:=\{x \in H:\Vert x\Vert \le 2\}\). Let \(g: C\rightarrow {\mathbb {R}}\) be defined by \(g(u):=\frac{1}{1+\Vert u\Vert ^2}\). Observe that g is \(L_g\)-Lipschitz continuous with \(L_g=\frac{16}{25}\) and \(\frac{1}{5}\le g(u)\le 1,~~\forall u \in C\). Define the Volterra integral operator \(F:L^2([0,1])\rightarrow L^2([0,1])\) by \(F(u)(t):=\int _0^t u(s)ds,~~\forall u \in L^2([0,1]), t \in [0,1].\) Then F is bounded linear monotone (see Exercise 20.12 of Bauschke and Combettes 2011) and \(\Vert F\Vert =\frac{2}{\pi }\). Now, define \(A:C\rightarrow L^2([0,1])\) by \(A(u)(t):=g(u)F(u)(t),~~\forall u \in C, t \in [0,1].\) Suppose \(\langle Au, v-u\rangle \ge 0,~~\forall u,v \in C\); then we have that \(\langle Fu, v-u\rangle \ge 0\) (noting that \(g(u)\ge \frac{1}{5}>0\)). Hence,
Therefore, A is pseudomonotone. Observe that A is not monotone since \(\langle Av-Au,v-u\rangle =-\frac{1}{20}<0\) with \(v=1\) and \(u=2\). Furthermore, for all \(u, v \in C\), we have
Hence, A is \(L_A\)-Lipschitz-continuous with \(L_A=\frac{82}{\pi }\). Therefore, A is uniformly continuous.
Observe that \(VI(C,A) \ne \emptyset \) since \(0 \in VI(C,A)\). We take \(\frac{\Vert x_{n+1}-x_n\Vert _2}{\max \{1,\Vert x_n\Vert _2\}}\le \epsilon \) as stopping criterion, with \(\epsilon =10^{-2}\). We consider different initial points \(x_1=1\), \(x_1=1+t^2\), \(x_1=e^t\) and \(x_1=sin(t)\) in the following cases:
Case I: \((\mu ,\lambda )=(0.3,3.2)\)
Case II: \((\mu ,\lambda )=(3.0,0.3)\)
We report the numerical behaviour of this example in Figs. 11, 12, 13 and 14 and Table 2.

Comparison with \(m=50\)

Comparison with \(m=100\)

Comparison with \(m=150\)

Comparison with \(m=200\)

Proposed Alg. 3.3 with \(m=500\)

Proposed Alg. 3.3 with \(m=1000\)

Proposed Alg. 3.3 with \(m=2000\)

Proposed Alg. 3.3 with \(m=3000\)

Proposed Alg. 3.3 with \(m=5000\)

Proposed Alg. 3.3 with \(m=10000\)

Proposed Alg. 3.3 with \(x_1=1\)

Proposed Alg. 3.3 with \(x_1=1+t^2\)

Proposed Alg. 3.3 with \(x_1=e^t\)

Proposed Alg. 3.3 with \(x_1=\sin (t)\)
Remark 4.3
-
1.
From the numerical results of Examples 2–3, we observe that our proposed Algorithm 3.3 is efficient and easy to implement. See Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13 and 14 and Tables 1 and 2.
-
2.
In Example 2, there is no significant change in the number of iterations required as we increase the dimension m. This is a significant improvement since the iteration number required to terminate the proposed Algorithm 3.3 does not depend on the size of the problem. See Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9 and 10 and Table 1.
-
3.
In Example 3, we observe also that both the choice of initial points and the parameters \(\mu \) and \(\lambda \) do not have significant effect on the number of iterations and the CPU time. See Figs. 11, 12, 13 and 14 and Table 2.
-
4.
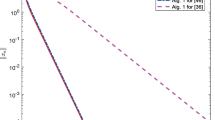
Clearly from the numerical Examples presented above, our proposed Algorithm 3.3 outperformed Algorithm 1.2 proposed by Vuong & Shehu. See Table 1 and Figs. 1 2, 3 and 4. We have omitted some of the comparison results (part in Example 2 and all in Example 3) due to large amount of time required by Vuong and Shehu Algorithm 1.2 to terminate.
Our preliminary examples in this section play a role in illustrating the rationality in studying pseudomonotone variational inequality. In future works, we shall give more interesting examples from applications.
5 Conclusions
In this paper we proposed a new algorithm for solving variational inequalities in real Hilbert spaces. The proposed algorithm shows the strongly convergence property under pseudomonotonicity and non-Lipschitz continuity of the mapping A. The algorithm requires the calculation of only two projections onto the feasible set C per iteration. These two properties pseudomonotonicity and non-Lipschitz continuity of the mapping A emphasize the applicability and advantages over several existing results in the literature. Numerical experiments in finite and infinite dimensional spaces illustrate the performance of the new scheme.
References
Antipin AS (1976) On a method for convex programs using a symmetrical modification of the Lagrange function. Ekon. i Mat. Metody. 12:1164–1173
Bauschke HH, Combettes PL (2011) Convex Analysis and Monotone Operator Theory in Hilbert Spaces. Springer, New York
Bello Cruz JY, Iusem AN (2009) A strongly convergent direct method for monotone variational inequalities in Hilbert spaces. Numer. Funct. Anal. Optim. 30:23–36
Bello Cruz JY, Iusem AN (2010) Convergence of direct methods for paramonotone variational inequalities. Comput. Optim. Appl. 46:247–263
Bello Cruz JY, Iusem AN (2012) An explicit algorithm for monotone variational inequalities. Optimization 61:855–871
Bello Cruz JY, Iusem AN (2015) Full convergence of an approximate projection method for nonsmooth variational inequalities. Math. Comput. Simul. 114:2–13
Bello Cruz JY, Díaz Millán R, Phan HM (2019) Conditional extragradient algorithms for solving variational inequalities. Pac. J. Optim. 15:331–357
Cegielski A (2012) Iterative Methods for Fixed Point Problems in Hilbert Spaces. Lecture Notes in Mathematics 2057. Springer, Berlin
Censor Y, Gibali A, Reich S (2011a) The subgradient extragradient method for solving variational inequalities in Hilbert space. J. Optim. Theory Appl. 148:318–335
Censor Y, Gibali A, Reich S (2011b) Strong convergence of subgradient extragradient methods for the variational inequality problem in Hilbert space. Optim. Methods Softw. 26:827–845
Censor Y, Gibali A, Reich S (2011c) Extensions of Korpelevich’s extragradient method for the variational inequality problem in Euclidean space. Optimization 61:1119–1132
Cottle RW, Yao JC (1992) Pseudomonotone complementarity problems in Hilbert space. J. Optim. Theory Appl. 75:281–295
Facchinei F, Pang JS (2003) Finite-Dimensional Variational Inequalities and Complementarity Problems. Springer Series in Operations Research, vols, vol 1. Springer, New York
Gibali A, Thong DV, Tuan PA (2019) Two simple projection-type methods for solving variational inequalities. Anal. Math. Phys. 9:2203–2225
Goebel K, Reich S (1984) Uniform Convexity, Hyperbolic Geometry, and Nonexpansive Mappings. Marcel Dekker, New York
Halpern B (1967) Fixed points of nonexpanding maps. Proc. Am. Math. Soc. 73:957–961
He YR (2006) A new double projection algorithm for variational inequalities. J. Comput. Appl. Math. 185:166–173
Iusem AN (1994) An iterative algorithm for the variational inequality problem. Comput. Appl. Math. 13:103–114
Iusem AN, Garciga OR (2001) Inexact versions of proximal point and augmented Lagrangian algorithms in Banach spaces. Numer. Funct. Anal. Optim. 22:609–640
Iusem AN, Svaiter BF (1997) A variant of Korpelevich’s method for variational inequalities with a new search strategy. Optimization 42:309–321
Kanzow C, Shehu Y (2018) Strong convergence of a double projection-type method for monotone variational inequalities in Hilbert spaces. J. Fixed Point Theory Appl. 20:51
Karamardian S (1976) Complementarity problems over cones with monotone and pseudomonotone maps. J. Optim. Theory Appl. 18:445–454
Konnov IV (1997) A class of combined iterative methods for solving variational inequalities. J. Optim. Theory Appl. 94:677–693
Konnov IV (1998) A combined relaxation method for variational inequalities with nonlinear constraints. Math. Progr. 80:239–252
Konnov IV (2001) Combined Relaxation Methods for Variational Inequalities. Springer, Berlin
Korpelevich GM (1976) The extragradient method for finding saddle points and other problems. Ekonom. i Mat. Metody. 12:747–756
Maingé PE (2008) A hybrid extragradient-viscosity method for monotone operators and fixed point problems. SIAM J. Control Optim. 47:1499–1515
Maingé P-E, Gobinddass ML (2016) Convergence of one-step projected gradient methods for variational inequalities. J. Optim. Theory Appl. 171:146–168
Malitsky YV (2015) Projected reflected gradient methods for monotone variational inequalities. SIAM J. Optim. 25:502–520
Moudafi A (2000) Viscosity approximating methods for fixed point problems. J. Math. Anal. Appl. 241:46–55
Solodov MV, Svaiter BF (1999) A new projection method for variational inequality problems. SIAM J. Control Optim. 37:765–776
Thong DV, Hieu DV (2018) Modified subgradient extragradient method for variational inequality problems. Numer. Algorithms 79:597–610
Thong DV, Hieu DV (2019) Mann-type algorithms for variational inequality problems and fixed point problems. Optimization. https://doi.org/10.1080/02331934.2019.1692207
Thong DV, Vuong PT (2019) Modifed Tseng’s extragradient methods for solving pseudomonotone variational inequalities. Optimization 68:2203–2222
Thong DV, Gibali A (2019a) Two strong convergence subgradient extragradient methods for solving variational inequalities in Hilbert spaces. Jpn J. Ind. Appl. Math. 36:299–321
Thong DV, Gibali A (2019b) Extragradient methods for solving non-Lipschitzian pseudo-monotone variational inequalities. J. Fixed Point Theory Appl. 21:20. https://doi.org/10.1007/s11784-018-0656-9
Thong DV, Triet NA, Li XH, Dong QL (2019a) Strong convergence of extragradient methods for solving bilevel pseudo-monotone variational inequality problems. Numer. Algorithms. https://doi.org/10.1007/s11075-019-00718-6
Thong DV, Hieu DV, Rassias TM (2019b) Self adaptive inertial subgradient extragradient algorithms for solving pseudomonotone variational inequality problems. Optim. Lett. https://doi.org/10.1007/s11590-019-01511-z
Thong DV, Shehu Y, Iyiola OS (2019c) Weak and strong convergence theorems for solving pseudo-monotone variational inequalities with non-Lipschitz mappings. Numer. Algorithms. https://doi.org/10.1007/s11075-019-00780-0
Vuong PT (2018) On the weak convergence of the extragradient method for solving pseudo-monotone variational inequalities. J. Optim. Theory Appl. 176:399–409
Vuong PT, Shehu Y (2019) Convergence of an extragradient-type method for variational inequality with applications to optimal control problems. Numer. Algorithms 81:269–291
Xu HK (2002) Iterative algorithms for nonlinear operators. J. Lond. Math. Soc. 66:240–256
Acknowledgements
The authors would like to thank Associate Editor and anonymous reviewers for their comments on the manuscript which helped us very much in improving and presenting the original version of this paper. This work is supported by Vietnam (National Foundation for Science and Technology Development (NAFOSTED)) under the project: 101.01-2019.320.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Paulo J. S. Silva.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Thong, D.V., Shehu, Y. & Iyiola, O.S. A new iterative method for solving pseudomonotone variational inequalities with non-Lipschitz operators. Comp. Appl. Math. 39, 108 (2020). https://doi.org/10.1007/s40314-020-1136-6
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-020-1136-6