
Abstract
Second-order Volterra integro-differential equation is solved by the linear barycentric rational collocation method. Following the barycentric interpolation method of Lagrange polynomial and Chebyshev polynomial, the matrix form of the collocation method is obtained from the discrete Volterra integro-differential equation. With the help of the convergence rate of the linear barycentric rational interpolation, the convergence rate of linear barycentric rational collocation method for solving Volterra integro-differential equation is proved. At last, several numerical examples are provided to validate the theoretical analysis.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this article, we pay our attention to the numerical solution of solving second-order Volterra integro-differential equation
where \(a_{2},a_{1},a_{0},a_{2}\ne 0 \) are constant, K(x, t) are the continuous function on \([a,b]\times [a,b]\) and f(x) are continuous functions.
Second-order Volterra integro-differential equation has been paid much attention because of its great importance in engineering and science. There are lots of physical phenomenon such as population dynamics of biological applications, electrostatics, potential theory, mechanics and so on. As it is difficult to solve second-order Volterra integro-differential equation analytically, numerical method is needed to be presented. Several numerical methods (Maleknejad and Aghazadeh 2005; Delves and Mohamed 1985; Ortiz and Samara 1981; Pour-Mahmoud et al. 2005; Hosseini and Shahmorad 2003; Razzaghi and Yousefi 2005; Yalcinbas et al. 2009; Bayramov and Kraus 2015), for examples, collocation and spectral collocation methods, Runge–Kutta methods, linear multistep methods, and block boundary value methods, the successive approximation method, the Adomian decomposition method, the Chebyshev and Taylor collocation method, Haar Wavelet method, Wavelet–Galerkin method have been used. There are some advantages such as without dividing elements, simple formulas, no integrals and easy programming of the collocation method (Bayramov and Kraus 2015; Shen et al. 2011). The barycentric formula is obtained by the Lagrange interpolation formula (Berrut et al. 2014; Berrut and Klein 2014; Cirillo and Hormann 2019) and has been used to solve Volterra equation and Volterra Integro-Differential equation (Ali et al. 2001; Berrut et al. 2011). In general, the interpolation nodes of Lagrange interpolation with barycentric center are dense at both ends of the interval and sparse in the middle of the interval. The special distributed nodes are usually the zeros of the spectral function or its derivative, such as the Chebyshev points of the second kind. To get the equidistant node of the barycentric formula, Floater et al. (2007, 2012a, b) have proposed a rational interpolation scheme which has high numerical stability and interpolation accuracy on both equidistant and special distributed nodes. In Garey and Shaw (1991), one-step methods of the Runge–Kutta type methods are presented for a class of second-order Volterra integro-differential equations in reference Abdi and Hossseint (2019), linear barycentric rational interpolation is used to derive a difference-quadrature scheme for solving first-order Volterra integro-differential equations. In recent papers, Wang et al. (2012, 2015, 2018, 2018) successfully applied the collocation method to solve initial value problems, plane elasticity problems, incompressible plane problems and non-linear problems which have expanded the application fields of the collocation method.
In this paper, the linear barycentric rational collocation method for solving second-order Volterra integro-differential equation is presented, which not only possess accurate numerical results but also have excellent stability properties. Following the barycentric interpolation method of Lagrange polynomial and Chebyshev polynomial, the matrix form of the collocation method is also obtained which can be easy to programming. With the help of the convergence rate of the linear barycentric rational interpolation, the convergence rate of linear barycentric rational collocation method for solving second-order Volterra integro-differential equation is proved. At last, several numerical examples are provided to validate our theoretical analysis.
This paper is organized as following: In Sect. 2, the differentiation matrices and collocation scheme for second-order Volterra integro-differential equation are presented and the matrix form of collocation scheme is obtained. In Sect. 3, the convergence rate is presented. At last, some numerical examples are listed to illustrated our theorem.
2 Differentiation matrices and algorithm for second-order Volterra integro-differential equation
Let the interval [a, b] be partitioned into n uniform part with \(h=(b-a)/n\) and \(x_{0},x_{1},\dots ,x_{n}\) with its related function \(u(x_{i}),i=0,1,\dots ,n\). For any \(0\le d \le n\), with \(p_{i}(x),i=0,1,\dots ,n-d\) to be the interpolation function at the point \(x_{i},x_{i+1},\dots ,x_{i+d}\), then we have \(p_{i}(x_{k})=u(x_{k}),k=i,i+1,\dots ,i+d\) and the rational barycentric interpolation function as Berrut et al. (2014)
where \( u_{j}=u(x_{j})\);
and
and \(J_{k}=\{i \in I ; k-d \le i \le k\},I=\{0,1,2,\dots ,n-d \}\).
Numerical scheme is given as
taking the \(x_{i}\) at the Eq. (5), we have
For the term of equation (6) with the integration, we have
Integral is written as
Taking (8) into Eq. (6), we have
Using the notation of differential matrix, the Eq. (9) is denoted as matrices equation in the form of
where we have used \( L_{j}(x_{i})= \delta _{i j}=0,i\ne j,\delta _{i j}=1,i= j \) ,\(i=0,1,2, \dots , n\) and \(K_{i j} =K_{j}(x_{i})\) defined as (8). Equation (9) is written as matrices in the form of
where \({\mathbf {L}} :=a_{2}{\mathbf {D}}^{(2)}+a_{1} {\mathbf {D}}^{(1)}+a_{0} {\mathbf {I}}+{\mathbf {K}} , {\mathbf {u}}=\left[ u_{0},u_{1}, u_{2}, \dots , u_{n}\right] ^{\mathrm {T}}, {\mathbf {D}}^{(k)}=\left[ D_{i j}^{(k)}\right] _{(n+1)\times (n+1)}, \) and
where \(\omega _{i}\) defined as (4).
3 Convergence and error analysis
In this part, the rational interpolation function (Wang and Li 2015) is presented as
where
and
With the help of error function of difference formula
where \(u[x_{i}, x_{i+1}, \ldots , x_{i+d}, x]\) denotes the divided difference of u at the points \(x_{i}, x_{i+1}, \ldots , x_{i+d}, x\), and
here,
and
By taking the numerical scheme
Combining (20) and (1), we have
and \(R_{f}(x)=f(x)-f(x_{k}),k=0,1,2,\dots ,n\).
The following Lemma has been proved in Jean–Paul Berrut Berrut et al. (2014).
Lemma 1
If \(y\in C^{d+2}[a,b]\),then
If \(y\in C^{d+2}[a,b]\),then
If \(y\in C^{d+3}[a,b]\),then
Let u(x) be the solution of (1) and \(u_{n}(x)\) is the numerical solution, then we have
and
where \(Tu=:a_{2}u^{\prime \prime }\left( x\right) +a_{1} u^{\prime }\left( x\right) +a_{0} u\left( x\right) + K(u(x)).\)
Based on the above lemma, we get the following theorem.
Theorem 1
Let \(u_{n}(x):Tu_{n}(x)=f(x),u_{n}^{*}(x):Tu_{n}^{*}(x)=f^{*}(x)\), \(f(x)\in C[a,b]\) and assume matrix \({\mathbf {L}} :=a_{2}{\mathbf {D}}^{(2)}+a_{1} {\mathbf {D}}^{(1)}+a_{0} {\mathbf {I}}+{\mathbf {K}}\) is invertible , we have
Proof
As
where \(U_{n}=(u(x_{0}),u(x_{1}), \ldots , u(x_{n}))^{T}\), \(U_{n}^{*}=(u^{*}(x_{0}),u^{*}(x_{1}), \ldots , u^{*}(x_{n}))^{T}\). By
which means
Combining the Lemma 1 and Eq. (21), we have
As we have assumed that matrix \({\mathbf {L}}\) is invertible and \(M_{j}(x)\) is the element of matrix \({\mathbf {L}}^{-1}\),then we have
The proof is completed. \(\square \)
4 Numerical example
In this part, numerical examples are presented to illustrate our theorem.
Example 1
Consider the second-order Volterra integro-differential equation
with condition \( u(0)=1,u^{\prime }(0)=1\) and its analysis solution is
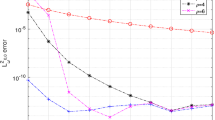
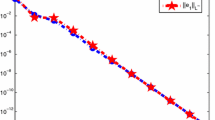
In this example, we test the linear barycentric rational with the equidistant nodes; Table 1 shows that the convergence rate is \(O(h^{d-1})\) with \(d=2,3,4,5\) which agrees with our theorem analysis. In Table 2, for the Chebyshev nodes, the convergence rate can reach \(O(h^{2d-2})\) with \(d=2,3,4,5\) which is out of our goal of this paper but will be presented in other papers. For \(n=160, 320,640\), because of the higher convergence rate and accumulation error of matlab, there is no convergence rate.
Example 2
In this example, we consider the second-order Volterra integro-differential equation with variable coefficient
where
with \(u(0)=1,u^{\prime }(0)=0\) and its analysis solution is
In this example, we test the linear barycentric rational with the equidistant nodes; Table 3 shows that the convergence rate is \(O(h^{d-1})\) with \(d=2,3,4,5\) which agrees with our theorem analysis. In Table 4, for the Chebyshev nodes, the convergence rate can reach \(O(h^{2d-2})\) with \(d=2,3,4,5\) which is out of our goal of this paper but will be presented in other papers. For \(n=160, 320,640\), because of the higher convergence rate and accumulation error of matlab, there is no convergence rate.
5 Concluding remarks
In this paper, the numerical approximation of linear barycentric rational collocation method for solving the constant coefficient second-order Volterra integro-differential equation is presented. The matrix form of algorithm is obtained from the equation (1). With the help of error function of difference formula, the convergence rate of linear barycentric rational collocation method \(O(h^{d-1})\) with equidistant nodes agree with our theorem analysis, while for Chebyshev point, numerical results shows the convergence rate can reach \(O(h^{2d-2})\) which is out of our goal of this paper will be presented in other papers.
In Theorem 1, we have assumed that the matrix \({\mathbf {L}}\) is invertible. With the matrix equation of the linear barycentric rational collocation method, as there are the term of integral matrix \({\mathbf {K}}\), we have not presented the invertible properties of matrix \({\mathbf {L}}\) which will be given in other papers.”
References
Abdi A, Hossseint SA (2019) The barycentric rational difference-quadrature scheme for systems of volterra integro-differential equations. SIAM J Sci Comput 40(3):A1936–A1960
Abdi A, Berrut J-P, Hosseini SA (2001) The linear barycentric rational method for a class of delay Volterra integro-differential equations. pp 1195–1210
Bayramov NR, Kraus JK (2015) On the stable solution of transient convection–diffusion equations. J Comput Appl Math 280:275–293
Berrut P, Klein G (2014) Recent advances in linear barycentric rational interpolation. J Comput Appl Math 259(Part A):95–107
Berrut P, Floater MS, Klein G (2011) Convergence rates of derivatives of a family of barycentric rational interpolants. Appl Numer Math 61(9):989–1000
Berrut JP, Hosseini SA, Klein G (2014) The linear barycentric rational quadrature method for Volterra integral equations. SIAM J Sci Comput 36(1):105–123
Cirillo E, Hormann K (2019) On the Lebesgue constant of barycentric rational Hermite interpolants at equidistant nodes. J Comput Appl Math 349:292–301
Delves LM, Mohamed JL (1985) Computational methods for integral equations. Cambridge University Press, Cambridge
Floater MS, Kai H (2007) Barycentric rational interpolation with no poles and high rates of approximation. Numer Math 107(2):315–331
Garey LE, Shaw RE (1991) Algorithms for the solution of second order Volterra integro-differential equations. Comput Math Appl 22(3):27–34
Hosseini SM, Shahmorad S (2003) Numerical solution of a class of integro-differential equations by the tau method with an error estimation. Appl Math Comput 136:559–570
Klein G, Berrut JP (2012a) Linear rational finite differences from derivatives of barycentric rational interpolants. SIAM J Numer Anal 50(2):643–656
Klein G, Berrut J-P (2012b) Linear barycentric rational quadrature. BIT Numer Math 52:407–424
Li S, Wang Z (2012) High precision meshless barycentric interpolation collocation method-algorithmic program and engineering application. Science Publishing, New York
Maleknejad K, Aghazadeh N (2005) Numerical solutions of Volterra integral equations of the second kind with convolution kernel by using Taylor-series expansion method. Appl Math Comput 161(3):915–922
Ortiz EL, Samara L (1981) An operational approach to the tau method for the numerical solution of nonlinear differential equations. Computing 27:15–25
Pour-Mahmoud J, Rahimi-Ardabili MY, Shahmorad S (2005) Numerical solution of the system of Fredholm integro-differential equations by the tau method. Appl Math Comput 168:465–478
Razzaghi M, Yousefi S (2005) Legendre wavelets method for the nonlinear Volterra Fredholm integral equations. Math Comput Simul 70:1–8
Shen J, Tang T, Wang L (2011) Spectral methods algorithms, analysis and applications. Springer, Berlin
Wang Z, Li S (2015) Barycentric interpolation collocation method for nonlinear problems. National Defense Industry Press, Beijing
Wang Z, Xu Z, Li J (2018) Mixed barycentric interpolation collocation method of displacement-pressure for incompressible plane elastic problems. Chin J Appl Mech 35(3):195–201
Wang Z, Zhang L, Xu Z, Li J (2018) Barycentric interpolation collocation method based on mixed displacement-stress formulation for solving plane elastic problems. Chin J Appl Mech 35(2):304–309
Yalcinbas S, Sezer M, Sorkun H (2009) Legendre polynomial solutions of high-order linear Fredholm integro-differential equations. Appl Numer Math 210:334–349
Acknowledgements
The work of Jin Li was supported by Natural Science Foundation of Shandong Province (Grant No. ZR2016JL006) Natural Science Foundation of Hebei Province (Grant No. A2019209533), National Natural Science Foundation of China (Grant Nos. 11471195, 11771398) and China Postdoctoral Science Foundation (Grant No. 2015T80703).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Hui Liang.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Li, J., Cheng, Y. Linear barycentric rational collocation method for solving second-order Volterra integro-differential equation. Comp. Appl. Math. 39, 92 (2020). https://doi.org/10.1007/s40314-020-1114-z
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-020-1114-z
Keywords
- Linear barycentric rational interpolation
- Collocation method
- Volterra integro-differential equation
- Convergence rate
- Barycentric interpolation method