
Abstract
In this paper, we propose an iterative technique with residual vectors for finding a common element of the set of fixed points of a relatively nonexpansive mapping and the set of solutions of a split inclusion problem (SIP) with a way of selecting the stepsizes without prior knowledge of the operator norm in the framework of p-uniformly convex and uniformly smooth Banach spaces. Then strong convergence of the proposed algorithm to a common element of the above two sets is proved. As applications, we apply our result to find the set of common fixed points of a family of mappings which is also a solution of the SIP. We also give a numerical example and demonstrate the efficiency of the proposed algorithm. The results presented in this paper improve and generalize many recent important results in the literature.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Let \(H_1\) and \(H_2\) be two Hilbert spaces. Let \(B_1:H_1\multimap H_1\) and \(B_2:H_2\multimap H_2\) be two set-valued maximal monotone operators and \(A:H_1\rightarrow H_2\) be a bounded linear operator. Moudafi (2011) introduced the following so-called split inclusion problem (SIP):
The set of solutions of problem (1.1) is denoted by \(\Gamma \), i.e., \(\Gamma :=\{x^*\in H_1:x^*\in B_{1}^{-1}(0)~~\text {and}~~Ax^*\in B_{2}^{-1}(0)\}\). In fact, we know that the split inclusion problem is a generalization of the inclusion problem and the split feasibility problem. Next, we provide some special cases of SIP (1.1).
-
Let \(f:H_1\rightarrow {\mathbb {R}}\cup \{+\infty \}\) and \(g:H_2\rightarrow {\mathbb {R}}\cup \{+\infty \}\) be proper, lower semicontinuous and convex functions. If we take \(B_1=\partial f\) and \(B_2=\partial g\), where \(\partial f\) and \(\partial g\) are the subdifferential of f and g, then the SIP (1.1) becomes the following so-called proximal split feasibility problem:
$$\begin{aligned} \text {Find}~~x^*\in \text {argmin}~f~~\text {such that}~~Ax^*\in \text {argmin}~g, \end{aligned}$$(1.2)where argmin \(f=\{x\in H_1: f(x)\le f(y),~\forall y\in H_1\}\) and argmin \(g=\{x\in H_2: g(x)\le g(y),~\forall y\in H_2\}\). In particular, if we take \(f(x)=\frac{1}{2}\Vert Mx-b\Vert ^2\) and \(g(x) =\frac{1}{2}\Vert Nx-c\Vert ^2\), where M and N are matrices, and \(b,c\in H_1\), then the SIP (1.2) becomes the least square problem. This problem has been intensively studied, especially, in Hilbert spaces; see for instance (Moudafi and Thakur 2014).
-
Let C and Q be nonempty, closed, and convex subsets of real Hilbert spaces \(H_1\) and \(H_2\), respectively. If \(B_1 = N_C\), \(B_2 = N_Q\), where \(N_C\) and \(N_Q\) are the normal cones of C and Q, respectively, then the SIP (1.2) becomes the following so-called split feasibility problem:
$$\begin{aligned} \text {Find}~~x^*\in C~~\text {such that}~~Ax^*\in Q. \end{aligned}$$(1.3)
This problem was first introduced, in a finite dimensional Hilbert space, by Censor and Elfving (1994) for modeling inverse problems in radiation therapy treatment planning which arise from phase retrieval and in medical image reconstruction, especially intensity modulated therapy (Censor et al. 2006).
To solve the SIP (1.1), Byrne et al. (2011) gave the following convergence theorem in infinite dimensional Hilbert spaces:
Theorem 1.1
Let \(H_1\) and \(H_2\) be real Hilbert spaces, \(A : H_1\rightarrow H_2\) be a bounded linear operator with its adjoint operator \(A^*\). Let \(B_1 : H_1\multimap H_1\) and \(B_2 : H_2\multimap H_2\) be set-valued maximal monotone mappings, \(\lambda >0\) and \(\gamma \in \big (0,\frac{2}{\Vert A\Vert ^2}\big )\). Suppose that \(\Gamma \ne \emptyset \). For given \(x_1\in H_1\), let \(\{x_n\}\) be the sequence defined by
Then \(\{x_n\}\) converges weakly to an element \(x^*\in \Gamma \).
In order to obtain strong convergence, Kazmi and Rizvi (2014) proposed an algorithm for solving SIP (1.1) with fixed points of a nonexpansive mapping T. They obtained the following result:
Theorem 1.2
Let \(H_1\) and \(H_2\) be real Hilbert spaces. Let \(A : H_1\rightarrow H_2\) be a bounded linear operator and \(f : H_1 \rightarrow H_1\) be a contraction mapping with a constant \(\alpha \in (0, 1)\). Let \(B_1 : H_1\multimap H_1\) and \(B_2 : H_2\multimap H_2\) be set-valued maximal monotone mappings, \(\lambda >0\). Let \(T : H_1 \rightarrow H_1\) be a nonexpansive mapping such that \(F(T)\cap \Gamma \ne \emptyset \). For a given \(x_1\in H_1\) arbitrarily, let the iterative sequences \(\{u_n\}\) and \(\{x_n\}\) be generated by
where \(\gamma \in \big (0,\frac{2}{\Vert A\Vert ^2}\big )\) and \(\{\alpha _n\}\) is a sequence in (0, 1) such that \(\lim _{n\rightarrow \infty }\alpha _n=0\), \(\sum _{n=1}^{\infty }\alpha _n=\infty \) and \(\sum _{n=1}^{\infty }|\alpha _{n+1}-\alpha _n|<\infty \). Then the sequences \(\{u_n\}\) and \(\{x_n\}\) both converge strongly to \(x^*\in F(T)\cap \Gamma \), where \(x^*=P_{F(T)\cap \Gamma }f(x^*)\).
On the other hand, Takahashi and Takahashi (2016) first introduced the SIP outside Hilbert spaces. Let \(E_1\) and \(E_2\) be two Banach spaces. Let \(B_1:E_1\multimap E_1\) and \(B_2:E_2\multimap E_2\) be two set-valued maximal monotone operators and \(A:E_1\rightarrow E_2\) be a bounded linear operator. They proposed the SIP in Banach spaces as follows:
In recent years, many authors have constructed several iterative methods for solving SIP (see, e.g., Sitthithakerngkiet et al. 2018; Takahashi and Takahashi 2016; Takahashi 2015, 2017; Takahashi and Yao 2015; Suantai et al. 2018; Jailoka and Suantai 2017; Ogbuisi and Mewomo 2017; Alofi et al. 2016).
Very recently, Alofi et al. (2016) introduced an algorithm based on Halpern’s iteration for solving SIP (1.1) in a uniformly convex and smooth Banach space. They proved the following strong convergence theorem:
Theorem 1.3
Let H be a Hilbert space and let E be a uniformly convex and smooth Banach space. Let \(J_E\) be the duality mapping on E. Let \(B_1:H\multimap H\) and \(B_2:E\multimap E^*\) be maximal monotone operators, respectively. Let \(J_{\lambda }^{B_1}\) be the resolvent of \(B_1\) for \(\lambda >0\) and let \(J_{\mu }^{B_2}\) be the metric resolvent of B for \(\mu > 0\). Let \(A:H\rightarrow E\) be a bounded linear operator with its adjoint \(A^*\) such that \( A\ne 0\). Suppose that \(\Gamma \ne \emptyset \). Let \(\{u_n\}\) be a sequence in H such that \(u_n\rightarrow u\). Let \(x_1\in H\) and let \(\{x_n\}\subset H\) be a sequence generated by
where \(\{\lambda _n\}\), \(\{\mu _n\}\subset (0,\infty )\), \(\{\alpha _n\}\subset (0,1)\) and \(\{\beta _n\}\subset (0,1)\) satisfy the following conditions:
for some \(a,b,c,d\in {\mathbb {R}}\). Then \(\{x_n\}\) converges strongly to \(x^*\in \Gamma \), where \(x^*=P_{\Gamma }u\).
However, it is observed that several iterative methods suggested require the computation of the norm of the bounded linear operator \(\Vert A\Vert \), which may not be calculated easily in general. In this work, motivated by the previous works, we introduce an iterative technique with residual vectors for solving the fixed point problem of a relatively nonexpansive mapping and SIP with a way of selecting the step sizes without prior knowledge of the operator norm in the framework of p-uniformly convex and uniformly smooth Banach spaces. We prove its strong convergence of proposed algorithm to a common element of the set fixed points of a relatively nonexpansive mapping and the solutions of the SIP. As applications, we apply our result to finding the set of common fixed points of a family of mappings which is also a solution of the SIP. We also give some numerical examples and demonstrate the efficiency of the proposed algorithm. The results obtained in this paper improve and generalize many known results in the literature.
2 Preliminaries
Let E and \(E^*\) be real Banach spaces and the dual space of E, respectively. Let \(E_1\) and \(E_2\) be real Banach spaces and let \(A : E_1 \rightarrow E_2\) be a bounded linear operator with its adjoint operator \(A^* : E_{2}^{*}\rightarrow E_{1}^{*}\) which is defined by
The modulus of convexity of E is the function \(\delta _E:(0,2]\rightarrow [0,1]\) defined by
The modulus of smoothness of E is the function \(\rho _E:{\mathbb {R}}^{+}:=[0,\infty )\rightarrow {\mathbb {R}}^{+}\) defined by
Definition 2.1
A Banach space E is said to be
-
1.
uniformly convex if \(\delta _E(\epsilon )>0\) for all \(\epsilon \in (0,2]\);
-
2.
p-uniformly convex (or to have a modulus of convexity of power type p) if there is a \(c_p > 0\) such that \(\delta _E(\epsilon )\ge c_p\epsilon ^p\) for all \(\epsilon \in (0,2]\);
-
3.
uniformly smooth if \(\lim _{\tau \rightarrow 0}\frac{\rho _{E}(\tau )}{\tau }=0\);
-
4.
q-uniformly smooth if there exists a \(c_q > 0\) such that \(\rho _E(\tau )\le c_q\tau ^q\) for all \(\tau >0\).
From the Definition 2.1, we observe that every p-uniformly convex space is uniformly convex and if E is q-uniformly smooth, then E is also uniformly smooth. It is known that (Agarwal et al. 2009)
where \(p\ge 2\) and \(1<q\le 2\) are conjugate exponents, i.e., p, q satisfy \(\frac{1}{p} + \frac{1}{q} = 1\) (see Xu and Roach 1991). For the sequence spaces \(\ell _p\), Lebesgue spaces \(L_p\) and Sobolev spaces \(W_{p}^{m}\), we also know that (Agarwal et al. 2009; Hanner 1956; Xu and Roach 1991)
Definition 2.2
A continuous strictly increasing function \(\varphi :{\mathbb {R}}^{+}\rightarrow {\mathbb {R}}^{+}\) is said to be a gauge if \(\varphi (0)=0\) and \(\lim _{t\rightarrow \infty }\varphi (t)=\infty \).
Definition 2.3
The mapping \(J_{\varphi }^{E}:E\multimap E^*\) associated with a gauge function \(\varphi \) defined by
is called the duality mapping with gauge \(\varphi \), where \(\langle \cdot ,\cdot \rangle \) denotes the duality pairing between E and \(E^*\).
If \(\varphi (t)=t\), then \(J_{\varphi }^{E}= J_2^{E}=J\) is the normalized duality mapping. In particular, \(\varphi (t)=t^{p-1}\), where \(p>1\), the duality mapping \(J_{\varphi }^{E}=J_{p}^{E}\) is called the generalized duality mapping which is defined by
It is well known that if E is uniformly smooth, the generalized duality mapping \(J_{p}^{E}\) is norm to norm uniformly continuous on bounded subsets of E (see Reich 1981). Furthermore, \(J_{p}^{E}\) is one-to-one, single-valued and satisfies \(J_{p}^{E}=(J_{q}^{E^*})^{-1}\), where \(J_{q}^{E^*}\) is the generalized duality mapping of \(E^*\) (see Reich 1992; Cioranescu 1990 for more details).
For a gauge \(\varphi \), the function \(\Phi :{\mathbb {R}}^{+}\rightarrow {\mathbb {R}}^{+}\) defined by
is a continuous convex strictly increasing differentiable function on \({\mathbb {R}}^{+}\) with \(\Phi '(t)=\varphi (t)\) and \(\lim _{t\rightarrow \infty }\frac{\Phi (t)}{t}=\infty \). Therefore, \(\Phi \) has a continuous inverse function \(\Phi ^{-1}\).
We next recall the Bregman distance, which was introduced and studied in Bregman (1967).
Definition 2.4
Let E be a real smooth Banach space. The Bregman distance \(D_\varphi (x,y)\) between x and y in E is defined by
We note that the Bregman distance \(D_\varphi \) does not satisfy the well-known properties of a metric because \(D_\varphi \) is not symmetric and does not satisfy the triangle inequality. Moreover, the Bregman distance has the following important properties:
for all \(x,y,z\in E\).
In the case \(\varphi (t)=t^{p-1}\), where \(p > 1\), the distance \(D_\varphi =D_p\) is called the p-Lyapunov function which was studied in Bonesky et al. (2008) and it is given by
where p, q are conjugate exponents. For the p-uniformly convex space, the Bregman distance has the following relation (see Schöpfer et al. 2008):
where \(\tau >0\) is some fixed number. If \(p=2\), we get
where \(\phi \) is called the Lyapunov function which was introduced by Alber (1993, 1996).
The following Lemma can be obtained from Theorem 2.8.17 of Agarwal et al. (2009) (see also Lemma 5 of Kuo and Sahu 2013).
Lemma 2.5
Let \(p>1\), \(r>0\) and E be a Banach space. Then the following statements are equivalent:
-
(i)
E is uniformly convex;
-
(ii)
There exists a strictly increasing convex function \(g_{r}^{*}:{\mathbb {R}}^{+}\rightarrow {\mathbb {R}}^{+}\) with \(g_{r}^{*}(0)=0\) such that
$$\begin{aligned} \big \Vert \sum _{k=1}^{N}\alpha _kx_k\big \Vert ^p\le \sum _{k=1}^{N}\alpha _k\Vert x_k\Vert ^p-\alpha _i\alpha _jg_{r}^{*}(\Vert x_i-x_j\Vert ), \end{aligned}$$for all \(i,j\in \{1,2,\ldots ,N\}\), \(x_k\in B_r:=\{x\in E:\Vert x\Vert \le r\}\), \(\alpha _k\in (0,1)\) with \(\sum _{k=1}^{N}\alpha _k=1\), where \(k\in \{1,2,\ldots ,N\}\).
Lemma 2.6
(Xu 1991) Let \(1<q\le 2\) and E be a Banach space. Then the following statements are equivalent:
-
(i)
E is q-uniformly smooth;
-
(ii)
there is a constant \(\kappa _q>0\) which is called the q-uniform smoothness coefficient of E such that for all \(x,y\in E\)
$$\begin{aligned} \begin{array}{lcl} \Vert x-y\Vert ^q\le \Vert x\Vert ^q-q\langle y,J_q^{E}(x)\rangle +\kappa _q\Vert y\Vert ^q. \end{array} \end{aligned}$$(2.5)
In what follows, we shall use the following notations: \(x_n\rightarrow x\) means that \(\{x_n\}\) converges strongly to x and \(x_n\rightharpoonup x\) means that \(\{x_n\}\) converges weakly to x. Let C be a closed and convex subset of E and let T be a mapping from C into itself. We denote F(T) by the set of all fixed points of T, i.e., F(T) = \(\{x\in C:x=Tx\}\). A point \(z\in C\) is called an asymptotic fixed point (Reich 1996) of T, if there exists a sequence \(\{x_n\}\) in C which converges weakly to z and \(\lim _{n\rightarrow \infty }\Vert x_n-Tx_n\Vert =0\). We denote \({\widehat{F}}(T)\) by the set of asymptotic fixed points of T. A mapping \(T : C\rightarrow C\) is called Bregman relatively nonexpansive (Butnariu et al. 2001, 2003; Censor and Reich 1996; Matsushita and Takahashi 2005), if the following conditions are satisfied:
-
(R1)
\(F(T)={\widehat{F}}(T)\ne \emptyset \);
-
(R2)
\(D_p(Tx,z)\le D_p(x,z),~~\forall z\in F(T),~\forall x\in C\).
Let E be a p-uniformly convex Banach space which is also uniformly smooth. Following Censor and Lent (1981) and Alber (1993), we make use of the function \(V_p:E^*\times E\rightarrow {\mathbb {R}}^{+}\) which is defined by
for all \(x\in E\) and \(x^*\in E^*\), where p, q are conjugate exponents. Then \(V_p\) is nonnegative and convex in the first variable. It is observed that
for all \(x\in E\) and \(x^*\in E^*\). In addition,
for all \(x\in E\) and \(x^*\in E^*\).
Lemma 2.7
(Bonesky et al. 2008) Let \(p > 1\) and E be a real p-uniformly convex and uniformly smooth Banach space. For \(x\in E\) and a sequence \(\{x_n\}\) in E. Then, \(\lim _{n\rightarrow \infty }D_p(x_n,x)=0\Longleftrightarrow \lim _{n\rightarrow \infty }\Vert x_n-x\Vert =0\).
Let C be a nonempty, closed and convex subset of a smooth, strictly convex and reflexive Banach space E. Then we know that for any \(x\in E\), there exists a unique element \(z\in C\) such that
The mapping \(\Pi _C:E\rightarrow C\) defined by \(z=\Pi _{C}x\) is called the generalized projection of E onto C.
Lemma 2.8
(Kuo and Sahu 2013) Let C be a nonempty, closed and convex subset of a p-uniformly convex and uniformly smooth Banach space E and let \(x \in E\). Then the following assertions hold:
-
(i)
\(z=\Pi _{C}x\) if and only if \(\langle J_{p}^{E}(x)-J_{p}^{E}(z),y-z\rangle \le 0\), \(\forall y\in C\).
-
(ii)
\(D_p(\Pi _Cx,y)+D_p(x,\Pi _Cx)\le D_p(x,y)\), \(\forall y\in C\).
Let \(B:E\multimap E^*\) be a mapping. The effective domain of B is denoted by D(B), i.e., \(D(B)=\{x\in E : Bx\ne \emptyset \}\). A multi-valued mapping B is said to be monotone if
A monotone operator B on E is said to be maximal if its graph is not properly contained in the graph of any other monotone operator on E.
Let E be a p-uniformly convex and uniformly smooth Banach space and let \(B:E\multimap E^*\) be a maximal monotone operator. Then, for \(x\in E\) and \(\lambda > 0\), we define a mapping \(Q_{\lambda }^{B}:E\rightarrow D(B)\) by
This mapping is called the metric resolvent of B for \(\lambda >0\). The set of null points of B is defined by \(B^{-1}(0)=\{z\in E: 0\in Bz\}\). We know that \(B^{-1}(0)\) is closed and convex (see Takahashi 2000). We see that
Further, \(F(Q_{\lambda }^{B})=B^{-1}(0)\) for \(\lambda >0\) (see Zeidler 1984). From Kuo and Sahu (2013), we also know that
for all \(x, y \in E\) and if \(B^{-1}(0)\ne \emptyset \), then
for all \(x\in E\) and \(z\in B^{-1}(0)\).
In addition, we can define a single-valued mapping \(R_{\lambda }^{B}:E\rightarrow D(B)\) so-called the resolvent of B by (Kohsaka and Takahashi 2005)
It is known that \(R_{\lambda }^{B}\) is a relatively nonexpansive mapping and \(F(R_{\lambda }^{B})=B^{-1}(0)\) for \(\lambda >0\) (see Kuo and Sahu 2013).
Lemma 2.9
(Kohsaka and Takahashi 2005) Let \(B:E\multimap E^*\) be a maximal monotone operator with \(B^{-1}(0)\ne \emptyset \) and let \(R_{\lambda }^{B}\) be a resolvent operator of B for \(\lambda >0\). Then
for all \(x\in E\) and \(z\in B^{-1}(0)\).
The following Theorem is proved by Kohsaka and Takahashi (see Kohsaka and Takahashi 2005, Lemma 7.2).
Lemma 2.10
(Kohsaka and Takahashi 2005) Let \(B:E\multimap E^*\) be a monotone operator. Then B is maximal if and only if for each \(\lambda >0\),
where \(R(J_{p}^{E}+\lambda B)\) is the range of \(J_{p}^{E}+\lambda B\).
The following lemma was proved by Suantai et al. (2018).
Lemma 2.11
Let \(E_1\) and \(E_2\) be uniformly convex and smooth Banach spaces. Let \(A:E_1\rightarrow E_2\) be a bounded linear operator with the adjoint operator \(A^*\). Let \(R_{\lambda }^{B_1}\) be the resolvent operator of a maximal monotone operator \(B_1\) for \(\lambda _1>0\) and \(Q_{\lambda _{2}}^{B_2}\) be a metric resolvent of a maximal monotone operator \(B_2\) for \(\lambda _2>0\). Suppose that \(\Gamma \ne \emptyset \). Let \(r>0\) and \(x^*\in E_1\). Then \(x^*\) is a solution of problem (1.6) if and only if
Lemma 2.12
Let E be a real p-uniformly convex and uniformly smooth Banach spaces. Suppose that \(x\in E\) and \(\{x_n\}\) is a sequence in E. Then the following statements are equivalent:
-
(a)
\(\{D_p(x_n,x)\}\) is bounded;
-
(b)
\(\{x_n\}\) is bounded.
Proof
For the implication \((a)\Longrightarrow (b)\) was proved in Reich and Sabach (2010). For the converse implication \((b)\Longrightarrow (a)\), we assume that \(x\in E\) and \(\{x_n\}\) are bounded. From (2.4), we observe that
for all \(n\in {\mathbb {N}}\), where \(M=\sup _{n\ge 1}\{\Vert x_n\Vert ,\Vert x_n\Vert ^{p-1},\Vert x\Vert ,\Vert x\Vert ^{p-1}\}\). This implies that \(\{D_p(x_n,x)\}\) is bounded. \(\square \)
Lemma 2.13
(Reich 1979) Assume that \(\{a_n\}\) is a sequence of nonnegative real numbers such that
where \(\{\gamma _n\}\) is a sequence in (0, 1) and \(\{\delta _n\}\) is a sequence in \({\mathbb {R}}\) such that \(\lim _{n\rightarrow \infty }\gamma _n=0\), \(\sum _{n=1}^{\infty }\gamma _n=\infty \) and \(\limsup _{n\rightarrow \infty }\delta _n\le 0\). Then \(\lim _{n\rightarrow \infty }a_n=0\).
Lemma 2.14
(Maingé 2008) Let \(\{\Gamma _n\}\) be a sequence of real numbers that does not decrease at infinity in the sense that there exists a subsequence \(\{\Gamma _{n_i}\}\) of \(\{\Gamma _n\}\) which satisfies \(\Gamma _{n_i}<\Gamma _{n_{i}+1}\) for all \(i\in {\mathbb {N}}\). Define the sequence \(\{\tau (n)\}_{n\ge n_0}\) of integers as follows:
where \(n_0\in {\mathbb {N}}\) such that \(\{k\le n_0:\Gamma _k<\Gamma _{k+1}\}\ne \emptyset \). Then, the following hold:
-
(i)
\(\tau ({n_0})\le \tau ({n_0+1})\le \ldots \) and \(\tau (n)\rightarrow \infty \);
-
(ii)
\(\Gamma _{\tau _n}\le \Gamma _{\tau (n)+1}\) and \(\Gamma _n\le \Gamma _{\tau (n)+1}\), \(\forall n\ge n_0\).
Lemma 2.15
Let E be a real p-uniformly convex and uniformly smooth Banach space. Let \(z,x_k\in E\) \((k=1,2,\ldots ,N)\) and \(\alpha _k\in (0,1)\) with \(\sum _{k=1}^{N}\alpha _k=1\). Then, we have
for all \(i,j\in \{1,2,\ldots ,N\}\).
Proof
Since p-uniformly convex, hence it is uniformly convex. From Lemma 2.5, we have
for all \(i,j\in \{1,2,\ldots ,N\}\). This completes the proof. \(\square \)
3 Algorithm and strong convergence theorem
In this section, we introduce an iterative algorithm for finding a common element of the set of solutions of split inclusion problem (1.6) and the set of fixed points of a Bregman relatively nonexpansive mapping. More specifically, we assume the following assumptions:
-
\(E_1\) and \(E_2\) are p-uniformly convex and uniformly smooth Banach spaces;
-
\(B_1:E_1\multimap E_{1}^{*}\) and \(B_2:E_2\multimap E_{2}^{*}\) are maximal monotone operators such that \(B_{1}^{-1}(0)\ne \emptyset \) and \(B_{2}^{-1}(0)\ne \emptyset \), respectively;
-
\(R_{\lambda _{1}}^{B_1}\) is the resolvent operator of a maximal monotone \(B_1\) for \(\lambda _1>0\) and \(Q_{\lambda _{2}}^{B_2}\) is the metric resolvent operator of a maximal monotone \(B_2\) for \(\lambda _{2}>0\);
-
\(A:E_1\rightarrow E_2\) is a bounded linear operator with its adjoint operator \(A^*:E_{2}^{*}\rightarrow E_{1}^{*}\);
-
\(T:E_1\rightarrow E_1\) is a Bregman relatively nonexpansive mapping such that \(F(T)={\widehat{F}}(T)\ne \emptyset \);
-
The set of solution of SIP is consistent, i.e., \(\Gamma \ne \emptyset \);
-
\(\Omega :=F(T)\cap \Gamma \ne \emptyset \);
-
\(\epsilon _n\) denotes the residual vector in \(E_1\) such that \(\lim _{n\rightarrow \infty }\epsilon _n=u\in E_1\).
Algorithm 3.1
Choose an initial guess \(u_1\in E_1\); let \(\{x_n\}_{n=1}^{\infty }\) and \(\{u_n\}_{n=1}^{\infty }\) be sequences generated by
where \(\{\alpha _n\}\), \(\{\beta _n\}\) and \(\{\gamma _n\}\) are sequences in (0, 1) such that \(\alpha _n+\beta _n+\gamma _n=1\). Suppose that stepsize \(\lambda _n\) is a bounded sequence chosen in such a way that
for some \(\epsilon >0\), where the index set \(N:=\{n\in {\mathbb {N}}:(I-Q_{\lambda _2}^{B_2})Au_n\ne 0\}\) and \(\lambda _n=\lambda \) (\(\lambda \) being any nonnegative value), otherwise. Note that the choice in (3.2) of the stepsize \(\lambda _n\) is independent of the norms \(\Vert A\Vert \).
Lemma 3.2
Let \(\{x_n\}_{n=1}^{\infty }\) and \(\{u_n\}_{n=1}^{\infty }\) be sequences generated by Algorithm 3.1. Then, \(\{x_n\}_{n=1}^{\infty }\) and \(\{u_n\}_{n=1}^{\infty }\) are bounded.
Proof. By the choice of \(\lambda _n\), we observe that
Let \(z\in \Omega \). From (2.14), we observe that
Set \(v_n:=J_{q}^{E_{1}^{*}}(J_{p}^{E_1}(u_n)-\lambda _n A^*J_{p}^{E_2}(I-Q_{\lambda _2}^{B_2})Au_n)\) for all \(n\ge 1\). By (3.4) and Lemma 2.6, we have
which implies by (3.3) that
Since \(\lim _{n\rightarrow \infty }\epsilon _n=u\in E_1\), which implies that \(\{\epsilon _n\}\) is bounded, then from Lemma 2.12, we have \(\{ D_p (\epsilon _n,z)\}\) is bounded. So there exists a constant \(K > 0\) such that \( D_p (\epsilon _n,z)\le K\) for all \(n\ge 1\). From Lemma 2.15, we have
By induction, we have \(\{ D_p (x_n,z)\}\) is bounded. Hence, \(\{x_n\}\) is bounded and so are \(\{u_n\}\) and \(\{Au_n\}\).
Theorem 3.3
Let \(\{x_n\}_{n=1}^{\infty }\) and \(\{u_n\}_{n=1}^{\infty }\) be sequences generated by Algorithm 3.1. Suppose that the following conditions hold:
-
(C1)
\(\lim _{n\rightarrow \infty }\alpha _n=0\) and \(\sum _{n=1}^{\infty }\alpha _n=\infty \);
-
(C2)
\(0<k \le \beta _n\gamma _n\le 1\) for some \(k\in (0,1)\).
Then \(\{x_n\}_{n=1}^{\infty }\) and \(\{u_n\}_{n=1}^{\infty }\) converge strongly to \(x^*=\Pi _{\Omega }u\), where \(\Pi _{\Omega }\) is the generalized projection from \(E_1\) onto \(\Omega \).
Proof
Let \(x^*=\Pi _{F(T)\cap \Gamma }u\). From (2.7) and (3.6), we have
We now divide the proof into two cases:
Case 1 Suppose that there exists \(n_0\in {\mathbb {N}}\) such that \(\{ D_p (x_n,x^*)\}_{n=n_0}^{\infty }\) is non-increasing. So we have \(\{ D_p (x_n,x^*)\}_{n=1}^{\infty }\) converges and it is bounded. From (3.7), we have
This implies that
By the property of \(g_{r}^{*}\), we have
Since \(J_{q}^{E_{1}^{*}}\) is uniformly norm-to-norm continuous on bounded subsets of \(E_{1}^{*}\), then
By Lemma 2.7, we also have
By the boundedness of \(\{x_n\}\) and the reflexivity of \(E_1\), there exists a subsequence \(\{x_{n_i}\}\) of \(\{x_n\}\) such that \(x_{n_i}\rightharpoonup {\hat{x}}\in E_1\). From (3.10), we obtain \({\hat{x}}\in {\widehat{F}}(T)= F(T)\). From (3.3), (3.5) and (3.6), we see that
which implies that
Hence
Then, we have
which implies that
Since \(J_{q}^{E_{1}^{*}}\) is norm-to-norm uniformly continuous on bounded subsets of \(E_{1}^{*}\),
By Lemma 2.9 and (3.6), we have
Thus, we have
Since \(x_{n_i}\rightharpoonup {\hat{x}}\in E_1\), we also have \(v_{n_i}\rightharpoonup {\hat{x}}\in E_1\). From (3.16), we get \({\hat{x}}\in F(R_{\lambda _1}^{B_1})\in B_{1}^{-1}(0)\).
From (3.15) and (3.16), we obtain
Since \(x_{n_i}\rightharpoonup {\hat{x}}\in E_1\) and from (3.17), we also get \(u_{n_i}\rightharpoonup {\hat{x}}\in E_1\). From (2.14), we have
Since A is continuous, we have \(Au_{n_i}\rightharpoonup A{\hat{x}}\) as \(i\rightarrow \infty \). Then, we have
that is, \(A{\hat{x}}=Q_{\lambda _2}^{B_2}A{\hat{x}}\). This shows that \(A{\hat{x}}\in F(Q_{\lambda _2}^{B_2})=B_{2}^{-1}(0)\). So \({\hat{x}}\in \Gamma \). Therefore, we conclude that \({\hat{x}}\in \Omega :=F(T)\cap \Gamma \).
Now, we see that
and hence
So, we have
We now choose a subsequence \(\{x_{n_i}\}\) of \(\{x_n\}\) such that
where \(x^*=\Pi _{\Omega }u\). From (3.17) and Lemma 2.8, we get
From (3.20), we also have
By (3.7), we note that
Since \(\epsilon _n\rightarrow u\) implies \(J_{p}^{E_1}(\epsilon _n)\rightarrow J_{p}^{E_1}(u)\). Considering this together with (3.21), we conclude by Lemma 2.13 that \(D_p(x_n,x^*)\rightarrow 0\) as \(n\rightarrow \infty \). Therefore,S \(x_n\rightarrow x^*\in \Omega \).
Case 2 Suppose that there exists a subsequence \(\{\Gamma _{n_i}\}\) of \(\{\Gamma _n\}\) such that \( \Gamma _{n_i}< \Gamma _{n_i+1}\) for all \(i\in {\mathbb {N}}\). Let us define a mapping \(\tau :{\mathbb {N}}\rightarrow {\mathbb {N}}\) by
Then, by Lemma 2.14, we obtain
Put \(\Gamma _n=D_p(x_n,x^*)\) for all \(n\in {\mathbb {N}}\). Then, we have from (3.6) that
which implies that
Following the proof line in Case 1, we can show that
and
Furthermore, we can show that
From (3.7), we have
which implies that
Since \(\Gamma _{\tau (n)}\le \Gamma _{\tau (n)+1}\) and \(\alpha _{\tau (n)}>0\), we get
Since \(\epsilon _{\tau (n)}\rightarrow u\) implies \(J_{p}^{E_1}(\epsilon _{\tau (n)})\rightarrow J_{p}^{E_1}(u)\). Hence, \(\lim _{n\rightarrow \infty }D_p(x_{{\tau (n)}},x^*)=0\). From (3.22), we obtain
which implies that \(D_p(x_n,x^*)\rightarrow 0\). That is \(x_n\rightarrow x^*\) as \(n\rightarrow \infty \). This completes the proof. \(\square \)
We consequently obtain the following result in Hilbert spaces:
Corollary 3.4
Let \(H_1\) and \(H_2\) be Hilbert spaces. Let \(B_1:H_1\multimap H_{1}\) and \(B_2:H_2\multimap H_{2}\) be maximal monotone operators such that \(B_{1}^{-1}(0)\ne \emptyset \) and \(B_{2}^{-1}(0)\ne \emptyset \), respectively. Let \(R_{\lambda _{1}}^{B_1}\) be the resolvent operator of a maximal monotone \(B_1\) for \(\lambda _1>0\) and let \(Q_{\lambda _{2}}^{B_2}\) be the metric resolvent operator of a maximal monotone \(B_2\) for \(\lambda _{2}>0\). Let \(A:H_1\rightarrow H_2\) be a bounded linear operator with its adjoint operator \(A^*:H_{2}\rightarrow H_{1}\). Let \(T:H_1\rightarrow H_1\) be a relatively nonexpansive mapping such that \(F(T)=\widehat{F}(T)\ne \emptyset \). Assume that \(\Omega :=F(T)\cap \Gamma \ne \emptyset \). Choose an initial guess \(u_1\in H_1\); let \(\{x_n\}_{n=1}^{\infty }\) and \(\{u_n\}_{n=1}^{\infty }\) be sequences generated by
where \(\{\epsilon _n\}\subset H_1\) is a residual vector such that \(\epsilon _n\rightarrow u\), and \(\{\alpha _n\}\), \(\{\beta _n\}\) and \(\{\gamma _n\}\) are sequences in (0, 1) such that \(\alpha _n+\beta _n+\gamma _n=1\). Suppose that stepsize \(\lambda _n\) is a bounded sequence chosen in such a way that
for some \(\epsilon >0\), where the index set \(N:=\{n\in {\mathbb {N}}:(I-Q_{\lambda _2}^{B_2})Au_n\ne 0\}\) and \(\lambda _n=\lambda \) (\(\lambda \) being any nonnegative value), otherwise. Suppose that the following conditions hold:
-
(C1)
\(\lim _{n\rightarrow \infty }\alpha _n=0\) and \(\sum _{n=1}^{\infty }\alpha _n=\infty \);
-
(C2)
\(0<k \le \beta _n\gamma _n\le 1\) for some \(k\in (0,1)\).
Then \(\{x_n\}_{n=1}^{\infty }\) and \(\{u_n\}_{n=1}^{\infty }\) converge strongly to \(x^*=\Pi _{\Omega }u\).
4 Convergence theorems for a family of mappings
In this section, we apply our result to the common fixed point problems of a family of mappings.
4.1 A countable family of relatively nonexpansive mappings
Definition 4.1
(Aoyama et al. 2007) Let C be a subset of a real p-uniformly convex and uniformly smooth Banach space E. Let \(\{T_n\}_{n=1}^{\infty }\) be a sequence of mappings of C in to E such that \(\bigcap _{n=1}^{\infty }F(T_n)\ne \emptyset \). Then \(\{T_n\}_{n=1}^{\infty }\) is said to satisfy the AKTT-condition if, for any bounded subset B of C,
As in Suantai et al. (2012), we can prove the following Proposition:
Proposition 4.2
Let C be a nonempty, closed and convex subset of a real p-uniformly convex and uniformly smooth Banach space E. Let \(\{T_n\}_{n=1}^{\infty }\) be a sequence of mappings of C such that \(\bigcap _{n=1}^{\infty }F(T_n)\ne \emptyset \) and \(\{T_n\}_{n=1}^{\infty }\) satisfies the AKTT-condition. Suppose that for any bounded subset B of C. Then there exists the mapping \(T : B \rightarrow E\) such that
and
In the sequel, we say that \((\{T_n\}, T )\) satisfies the AKTT-condition if \(\{T_n\}_{n=1}^{\infty }\) satisfies the AKTT-condition and T is defined by (4.1) with \(\bigcap _{n=1}^{\infty }F(T_n)=F(T)\).
Theorem 4.3
Let \(E_1\) and \(E_2\) be p-uniformly convex and uniformly smooth Banach spaces. Let \(B_1:E_1\multimap E_{1}^{*}\) and \(B_2:E_2\multimap E_{2}^{*}\) be maximal monotone operators such that \(B_{1}^{-1}(0)\ne \emptyset \) and \(B_{2}^{-1}(0)\ne \emptyset \), respectively. Let \(R_{\lambda _{1}}^{B_1}\) be the resolvent operator of a maximal monotone \(B_1\) for \(\lambda _1>0\) and let \(Q_{\lambda _{2}}^{B_2}\) be the metric resolvent operator of a maximal monotone \(B_2\) for \(\lambda _{2}>0\). Let \(A:E_1\rightarrow E_2\) be a bounded linear operator with its adjoint operator \(A^*:E_{2}^{*}\rightarrow E_{1}^{*}\). Let \(\{T_n\}_{n=1}^{\infty }\) be a countable family of Bregman relatively nonexpansive mappings on \(E_1\) such that \(F(T_n)={\widehat{F}}(T_n)\) for all \(n\ge 1\). Assume that \(\Omega :=\bigcap _{n=1}^{\infty }F(T_n)\cap \Gamma \ne \emptyset \). Choose an initial guess \(u_1\in E_1\), and let \(\{x_n\}_{n=1}^{\infty }\) and \(\{u_n\}_{n=1}^{\infty }\) be sequences generated by
where \(\{\epsilon _n\}\subset E_1\) is a residual vector such that \(\epsilon _n\rightarrow u\), and \(\{\alpha _n\}\), \(\{\beta _n\}\) and \(\{\gamma _n\}\) are sequences in (0, 1) such that \(\alpha _n+\beta _n+\gamma _n=1\). Suppose that stepsize \(\lambda _n\) is a bounded sequence chosen in such a way that
for some \(\epsilon >0\), where the index set \(N:=\{n\in {\mathbb {N}}:(I-Q_{\lambda _2}^{B_2})Au_n\ne 0\}\) and \(\lambda _n=\lambda \) (\(\lambda \) being any nonnegative value), otherwise. Suppose that the following conditions hold:
-
(C1)
\(\lim _{n\rightarrow \infty }\alpha _n=0\) and \(\sum _{n=1}^{\infty }\alpha _n=\infty \);
-
(C2)
\(0<k \le \beta _n\gamma _n\le 1\) for some \(k\in (0,1)\).
Suppose in addition that \((\{T_n\}_{n=1}^{\infty }, T )\) satisfies the AKTT-condition and \(F(T) = {\widehat{F}}(T)\). Then \(\{x_n\}_{n=1}^{\infty }\) and \(\{u_n\}_{n=1}^{\infty }\) converge strongly to \(x^*=\Pi _{\Omega }u\), where \(\Pi _{\Omega }\) is the generalized projection from \(E_1\) onto \(\Omega \).
Proof
To this end, it suffices to show that \(\lim _{n\rightarrow \infty }\Vert x_n-Tx_n\Vert =0\). By following the method of proof in Theorem 3.3, we can show that \(\{x_n\}\) is bounded and \(\lim _{n\rightarrow \infty }\Vert x_n-T_nx_n\Vert =0\). Since \(J_{p}^{E_1}\) is uniformly continuous on bounded subsets of \(E_1\), we have
By Proposition 4.2, we see that
Since \(J_{q}^{E_{1}^{*}}\) is norm-to-norm uniformly continuous on bounded subsets of \(E_{1}^{*}\),
This completes the proof. \(\square \)
4.2 A semigroup of relatively nonexpansive mappings
Definition 4.4
A one-parameter family \({\mathcal {S}} = \{T_t\}_{t\ge 0}\) from E into E is said to be a nonexpansive semigroup if it satisfies the following conditions:
-
(S1)
\(T_0x=x ~~\text {for all} ~~x\in E\);
-
(S2)
\(T_{s+t}=T_sT_t\) for all \(s,t\ge 0\);
-
(S3)
for each \(x\in C\) the mapping \(t\mapsto T_tx\) is continuous;
-
(S4)
for each \(t \ge 0\), \(T_t\) is nonexpansive, i.e.,
$$\begin{aligned} \Vert T_tx-T_ty\Vert \le \Vert x-y\Vert ,~\forall x,y\in E. \end{aligned}$$
Remark 4.5
We denote by \(F({\mathcal {S}})\) the set of all common fixed points of \({\mathcal {S}}\), i.e., \(F({\mathcal {S}})=\bigcap _{t\ge 0}F(T_t)\).
We now give some examples of semigroup operator. The following classical examples were one of the main sources for the development of semigroup theory (see Engel and Nagel 2000):
Example 4.6
Let E be a real Banach space and let \({\mathcal {L}}(E)\) be the space of all bounded linear operators on E. For \(A\in {\mathcal {L}}(E)\) and define a bounded linear operator \(T_t\) by
for \(t\ge 0\). Then, the operator \(T_t\) is a semigroup on E.
Example 4.7
Let \(E:=L^{p}({\mathbb {R}}^n)\), \(1\le p<\infty \). Consider the initial value problem for the heat equation:

where \(\Delta =\sum _{i=1}^{n}\frac{\partial ^2}{\partial x_{i}^{2}}\) is the Laplacian operator on E. We can solve the heat equation using Fourier transform and the solution (4.4) can be written as follows:
where \(t>0\), \(s\in {\mathbb {R}}^n\) and \(f\in E\). Then, we can write the solution u(x, t) in the form of convolution integral as follows:
where \(K_t\) is heat kernel given by \(K_t(x)=\frac{1}{\sqrt{(4\pi t)^n}}e^{\frac{-\Vert x\Vert ^2}{4t}}\). Then the solution of (4.4) can be written as follows:
We can check that the operator \(T_tf(x)\) is a semigroup on E.
Definition 4.8
A one-parameter family \({\mathcal {S}} = \{T_t\}_{t\ge 0}:E\rightarrow E\) is said to be a family of uniformly Lipschitzian mappings if there exists a bounded measurable function \(L_t:(0,\infty )\rightarrow [0,\infty )\) such that
We now first give the following definition:
Definition 4.9
A one-parameter family \({\mathcal {S}} = \{T_t\}_{t\ge 0}:E\rightarrow E\) is said to be a Bregman relatively nonexpansive semigroup if it satisfies (S1), (S2), (S3) and the following conditions:
-
(a)
\(F({\mathcal {S}})={\widehat{F}}({\mathcal {S}})\ne \emptyset \);
-
(b)
\( D_p (T_tx,z)\le D_p (x,z),~~\forall x\in E,~z\in F({\mathcal {S}})\) and \(t\ge 0\).
Using idea in Aleyner and Censor (2005), Aleyner and Reich (2005) and Benavides et al. (2002), we define the following concept:
Definition 4.10
A continuous operator semigroup \({\mathcal {S}}=\{T_t\}_{t\ge 0}:E\rightarrow E\) is said to be uniformly asymptotically regular (in short, u.a.r.) if for all \(s\ge 0\) and any bounded subset B of E such that
Theorem 4.11
Let \(E_1\) and \(E_2\) be p-uniformly convex and uniformly smooth Banach spaces. Let \(B_1:E_1\multimap E_{1}^{*}\) and \(B_2:E_2\multimap E_{2}^{*}\) be maximal monotone operators such that \(B_{1}^{-1}(0)\ne \emptyset \) and \(B_{2}^{-1}(0)\ne \emptyset \), respectively. Let \(R_{\lambda _{1}}^{B_1}\) be the resolvent operator of a maximal monotone \(B_1\) for \(\lambda _1>0\) and let \(Q_{\lambda _{2}}^{B_2}\) be the metric resolvent operator of a maximal monotone \(B_2\) for \(\lambda _{2}>0\). Let \(A:E_1\rightarrow E_2\) be a bounded linear operator with its adjoint operator \(A^*:E_{2}^{*}\rightarrow E_{1}^{*}\). Let \({\mathcal {S}}=\{T_t\}_{t\ge 0}\) be a u.a.r. Bregman relatively nonexpansive semigroup of uniformly Lipschitzian mappings on \(E_1\) into \(E_1\) with a bounded measurable function \(L_t:(0,\infty )\rightarrow [0,\infty )\) such that \(F({\mathcal {S}}):=\bigcap _{h\ge 0}F(T_h)\ne \emptyset \). Assume that \(\Omega :=F({\mathcal {S}})\cap \Gamma \ne \emptyset \). Choose an initial guess \(u_1\in E_1\); let \(\{x_n\}_{n=1}^{\infty }\) and \(\{u_n\}_{n=1}^{\infty }\) be sequences generated by
where \(\{\epsilon _n\}\subset E_1\) is a residual vector such that \(\epsilon _n\rightarrow u\), and \(\{\alpha _n\}\), \(\{\beta _n\}\) and \(\{\gamma _n\}\) are sequences in (0, 1) such that \(\alpha _n+\beta _n+\gamma _n=1\). Suppose that stepsize \(\lambda _n\) is a bounded sequence chosen in such a way that
for some \(\epsilon >0\), where the index set \(N:=\{n\in {\mathbb {N}}:(I-Q_{\lambda _2}^{B_2})Au_n\ne 0\}\) and \(\lambda _n=\lambda \) (\(\lambda \) being any nonnegative value), otherwise. Suppose that the following conditions hold:
-
(C1) \(\lim _{n\rightarrow \infty }\alpha _n=0\) and \(\sum _{n=1}^{\infty }\alpha _n=\infty \);
-
(C2) \(0<k \le \beta _n\gamma _n\le 1\) for some \(k\in (0,1)\);
-
(C3) \(\{t_n\}\subset (0,\infty )\) with \(\lim _{n\rightarrow \infty }t_n=\infty \).
Then \(\{x_n\}_{n=1}^{\infty }\) and \(\{u_n\}_{n=1}^{\infty }\) converge strongly to \(x^*=\Pi _{\Omega }u\), where \(\Pi _{\Omega }\) is the generalized projection from \(E_1\) onto \(\Omega \).
Proof
We only have to show that \(\lim _{n\rightarrow \infty }\Vert x_n-T_tx_n\Vert =0\) for all \(t\ge 0\). By following the method of proof in Theorem 3.3, we can show that \(\{x_n\}\) is bounded and
Since \(\{T_t\}_{t\ge 0}\) is a uniformly of Lipschitzian mappings with a bounded measurable function \(L_t\). Then, we have
Since \(J_{p}^{E_1}\) is uniformly norm-to-norm continuous on bounded subsets of \(E_1\), then we also have
For each \(t\ge 0\), we note that
Since \(\{T_t\}_{t\ge 0}\) is a u.a.r. Bregman relatively nonexpansive semigroup with \(\lim _{n\rightarrow \infty }t_n=\infty \), then from (4.7) and (4.8), we get
for all \(t\ge 0\). Since \(J_{q}^{E_{1}^{*}}\) is uniformly norm-to-norm continuous on bounded subsets of \(E_{1}^{*}\), we get
This completes the proof. \(\square \)
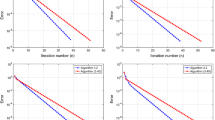
5 Numerical experiments

The convergence behavior of \(E_n\) for \(N = 50\) and \(M=50\)
In this section, we give some numerical examples to support our main theorem.
Example 5.1
For each \({\mathbf {x}}=(x_1,x_2,\ldots ,x_N)\in {\mathbb {R}}^{N}\). Let \(f:{\mathbb {R}}^N\rightarrow {\mathbb {R}}\cup \{+\infty \}\) and \(g:{\mathbb {R}}^N\rightarrow {\mathbb {R}}\cup \{+\infty \}\) be defined by
Then, we have
and
for \(i=1,2,3,\ldots ,N\). Let a mapping \(T:{\mathbb {R}}^{N}\rightarrow {\mathbb {R}}^{N}\) be defined by
We aim to solve the following SIP and the fixed point problem: find \(x^*\in \Gamma \cap F(T)\), i.e., find \(x^*\in \) argmin f such that \(Ax^*\in \arg \)min g and \(x^*\) is a fixed point of T, where A is a real \(N\times M\) matrix. So our iterative scheme (3.1) becomes
Let \(\lambda _1=\lambda _2=1\), \(\alpha _n=\frac{1}{20n+1}\), \(\beta _n=0.5\), \(\gamma _n=\frac{10n-0.5}{20n+1}\) and \(\lambda _n=\frac{\Vert A{\mathbf {u}}_n-\text {prox}_{\lambda _2}^{g}(A{\mathbf {u}}_n)\Vert ^2}{\Vert A^t(A{\mathbf {u}}_n-\text {prox}_{\lambda _2}^{g}(A{\mathbf {u}}_n))\Vert ^2}\). The stopping criterion is defined by \(E_{n}=\Vert u_{n+1}-u_{n}\Vert <10^{-6}\). The matrix A is generated from a normal distribution with mean zero and one variance. For an initial guess \({\mathbf {x}}_1\in {\mathbb {R}}^{N}\) and residual vector \(\epsilon _n\in {\mathbb {R}}^{N}\) randomly, we obtain the following numerical results, given in Table 1 and Figs. 1, 2, 3, 4 and 5:

The convergence behavior of \(E_n\) for \(N = 100\) and \(M=50\)

The convergence behavior of \(E_n\) for \(N = 200\) and \(M=200\)

The convergence behavior of \(E_n\) for \(N = 150\) and \(M=300\)

The convergence behavior of \(E_n\) for \(N = 500\) and \(M=1000\)
References
Agarwal RP, O’Regan D, Sahu DR (2009) Fixed point theory for Lipschitzian type mappings with applications. Springer, Berlin
Alber YI (1993) Generalized projection operators in Banach spaces: properties and applications. In: Functional differential equations. Proceedings of the Israel seminar ariel, vol 1, pp 1–21
Alber YI (1996) Metric and generalized projection operators in Banach spaces: properties and applications. Lect Notes Pure Appl Math 178:15–50
Aleyner A, Censor Y (2005) Best approximation to common fixed points of a semigroup of nonexpansive operator. Nonlinear Convex Anal 6(1):137–151
Aleyner A, Reich S (2005) An explicit construction of sunny nonexpansive retractions in Banach spaces. Fixed Point Theory Appl 3:295–305
Alofi AS, Alsulami SM, Takahashi W (2016) Strongly convergent iterative method for the split common null point problem in Banach spaces. J Nonlinear Convex Anal 17:311–324
Aoyama K, Kimura Y, Takahashi W, Toyoda M (2007) Approximation of common fixed points of a countable family of nonexpansive mappings in a Banach space. Nonlinear Anal Theory Methods Appl 67:2350–2360
Benavides TD, Acedo GL, Xu HK (2002) Construction of sunny nonexpansive retractions in Banach spaces. Bull Austr Math Soc 66(1):9–16
Bonesky T, Kazimierski KS, Maass P, Schöpfer F, Schuster T (2008) Minimization of Tikhonov functionals in Banach spaces. Abstr Appl Anal. https://doi.org/10.1155/2008/192679
Bregman LM (1967) The relaxation method for finding the common point of convex sets and its application to the solution of problems in convex programming. USSR Comput Math Math Phys 7:200–217
Browder FE (1965) Fixed-point theorems for noncompact mappings in Hilbert space. Proc Natl Acad Sci USA 53:1272–1276
Butnariu D, Reich S, Zaslavski AJ (2001) Asymptotic behavior of relatively nonexpansive operators in Banach spaces. J Appl Anal 7(2):151–174
Butnariu D, Reich S, Zaslavski AJ (2003) Weak convergence of orbits of nonlinear operators in reflexive Banach spaces. Numer Funct Anal Optim 24:489–508
Byrne C, Censor Y, Gibali A, Reich S (2011) Weak and strong convergence of algorithms for the split common null point problem. J Nonlinear Convx Anal 13:759–775
Censor Y, Elfving T (1994) A multiprojection algorithm using Bregman projections in a product space. Numer Algorithms 8:221–239
Censor Y, Lent A (1981) An iterative row-action method for interval convex programming. J Optim Theory Appl 34:321–353
Censor Y, Reich S (1996) Iterations of paracontractions and firmly nonexpansive operators with applications to feasibility and optimization. Optimization 37:323–339
Censor Y, Bortfeld T, Martin B, Trofimov A (2006) A unified approach for inversion problems in intensity-modulated radiation therapy. Phys Med Biol 51:2353–2365
Chidume C (2009) Geometric properties of banach spaces and nonlinear iterations. Springer, London, p 2009
Cioranescu I (1990) Geometry of Banach spaces, duality mappings and nonlinear problems. Kluwer Academic, Dordrecht
Engel KJ, Nagel R (2000) One-parameter semigroups for linear evolution equations. Springer, New York Inc
Hanner O (1956) On the uniform convexity of \(L_p\) and \(\ell _p\). Arkiv Mat 3(3):239–244
Jailoka P, Suantai S (2017) Split common fixed point and null point problems for demicontractive operators in Hilbert spaces. Optim Methods Softw. https://doi.org/10.1080/10556788.2017.1359265
Kazmi KR, Rizvi H (2014) An iterative method for split variational inclusion problem and fixed point problem for a nonexpansive mapping. Optim Lett 8:1113
Kohsaka F, Takahashi W (2005) Proximal point algorithm with Bregman function in Banach spaces. J Nonlinear Convex Anal 6(3):505–523
Kohsaka F, Takahashi W (2008) Existence and approximation of fixed points of firmly nonexpansive-type mappings in Banach spaces. SIAM J Optim 19(2):824–835
Kuo LW, Sahu DR (2013) Bregman distance and strong convergence of proximal-type algorithms. Abstr Appl Anal. https://doi.org/10.1155/2013/590519
Maingé PE (2008) Strong convergence of projected subgradient methods for nonsmooth and nonstrictly convex minimization. Set Valued Anal 16:899–912
Matsushita S, Takahashi W (2005) A strong convergence theorem for relatively nonexpansive mappings in a Banach space. J Approx Theory 134:257–266
Moudafi A (2011) Split monotone variational inclusions. J Optim Theory Appl 150(2):275–283
Moudafi A, Thakur BS (2014) Solving proximal split feasibility problems without prior knowledge of operator norms. Optim Lett 8:2099–2110
Ogbuisi FU, Mewomo OT (2017) Iterative solution of split variational inclusion problem in a real Banach spaces. Afr Mat 28:295–309
Reich S (1979) Constructive techniques for accretive and monotone operators. Appl Nonlinear Anal. Academic Press, New York, pp 335–345
Reich S (1981) On the asymptotic behavior of nonlinear semigroups and the range of accretive operators. J Math Anal Appl 79(1):113–126
Reich S (1992) Review of geometry of Banach spaces, duality mappings and nonlinear problems by Ioana Cioranescu. Kluwer Academic Publishers, Dordrecht. 1990 Bull Amer Math Soc 26:367–370
Reich S (1996) A weak convergence theorem for the alternating method with Bregman distance. Theory and applications of nonlinear operators of accretive and monotone type. Marcel Dekker, New York. Lecture Notes Pure Appl Math 313–318
Reich S, Sabach S (2010) Two strong convergence theorems for a proximal methods in reflexive Banach spaces. Numer Funct Anal Optim 31(1):22–44
Schöpfer F, Schuster T, Louis AK (2008) An iterative regularization method for the solution of the split feasibility problem in Banach spaces. Inverse Probl. https://doi.org/10.1088/0266-5611/24/5/055008
Sitthithakerngkiet K, Deepho J, Martinez-Moreno J, Kumam P (2018) Convergence analysis of a general iterative algorithm for finding a common solution of split variational inclusion and optimization problems. Numer Algorithms. https://doi.org/10.1007/s11075-017-0462-2
Shehu Y, Iyiola OS, Enyi CD (2016) An iterative algorithm for solving split feasibility problems and fixed point problems in Banach spaces. Numer Algorithms 72:835
Suantai S, Cho YJ, Cholamjiak P (2012) Halpern’s iteration for Bregman strongly nonexpansive mappings in reflexive Banach spaces. Comput Math Appl 64:489–499
Suantai S, Shehu Y, Cholamjiak P (2018) Nonlinear iterative methods for solving the split common null point problem in Banach spaces. Optim Methods Softw. https://doi.org/10.1080/10556788.2018.1472257
Takahashi W (2000) Convex analysis and approximation of fixed points. Yokohama Publishers, Yokohama (Japanese)
Takahashi W (2015) The split common null point problem in Banach spaces. Arch Math 104:357–365
Takahashi W (2017) The split common null point problem for generalized resolvents in two Banach spaces. Numer Algorithms 75:1065–1078
Takahashi S, Takahashi W (2016) The split common null point problem and the shrinking projection method in Banach spaces. Optimization 65:281–287
Takahashi W, Yao JC (2015) Strong convergence theorems by hybrid methods for the split common null point problem in Banach spaces. Fixed Point Theory Appl 2015:87
Xu HK (1991) Inequalities in Banach spaces with applications. Nonlinear Anal Theory Methods Appl 16:1127–1138
Xu ZB, Roach GF (1991) Characteristic inequalities of uniformly convex and uniformly smooth Banach spaces. J Math Anal Appl 157(1):189–210
Zeidler E (1984) Nonlinear functional analysis, vol 3. Springer, New York
Acknowledgements
P. Cholamjiak was supported by the Thailand Research Fund and University of Phayao under Grant RSA6180084. S. Suantai was partially supported by Chiang Mai University.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Héctor Ramírez.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Cholamjiak, P., Suantai, S. & Sunthrayuth, P. An iterative method with residual vectors for solving the fixed point and the split inclusion problems in Banach spaces. Comp. Appl. Math. 38, 12 (2019). https://doi.org/10.1007/s40314-019-0766-z
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-019-0766-z