
Abstract
This paper investigates the local stability of input- and output-quantized discrete-time linear time-invariant systems considering static finite-level logarithmic quantizers. The sector bound approach together with a relaxed stability notion is applied to derive an LMI-based method to estimate a set of admissible initial states and its attractor in a neighborhood of the system origin assuming that an output feedback controller and the quantizers are given. In addition, the stability analysis method is tailored to design an input and an output static finite-level logarithmic quantizers when a set of admissible initial states and an upper bound on the volume of its attractor are known. Numerical examples are presented to demonstrate the proposed stability analysis and quantizer design methods.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
With the increasing application of communication links to exchange information and control signals between spatially distributed system components, networked control systems (NCS) have recently attracted growing interest of the control community motivated by the fact that NCS bring a new range of control applications (Hespanha et al. 2007; Schenato et al. 2007; You and Xie 2013). Since in many situations quantization errors are unavoidable, their effects cannot be neglected at the cost of an inadequate closed-loop performance and even the lost of stability. As a result, the study of quantized feedback systems is of relevance in networked control systems.
Originally, quantized feedback systems were studied to evaluate and mitigate the quantization errors arising from the digital implementation of feedback systems; see, for instance, Kalman (1956), Slaughter (1964) and Delchamps (1990). Nowadays, with the increasing application of NCS in which control system components (i.e., sensor, controller and actuator) are connected via a shared digital communication network, the problem of limited bandwidth becomes an issue of great interest. In this context, quantized feedback methods can be applied to deal with the bandwidth allocation problem by constraining the number of bits to be transmitted in the communication link (Maestrelli et al. 2014). As a result, an increasing number of works in the last ten or more years has focused on the topic of quantized feedback systems, such as the references Brockett and Liberzon (2000); Ishii and Francis (2003); Fu and Xie (2005); Coutinho et al. (2010); Wei et al. (2014) to cite a few.
Signal quantization may be performed in several ways. For instance, the quantization levels can be uniformly or non-uniformly distributed, and the quantization policy can be divided into static and dynamic constructive laws. In Elia and Mitter (2001), it has been shown that for a quadratically stabilizable system a logarithmic quantizer (i.e., the quantization levels are linear in a logarithmic scale) is the optimal solution in terms of coarse quantization density. In addition, logarithmic quantizers can achieve superior dynamic range for a given number of bits (Rasool et al. 2012). However, the optimal solution requires an ideal logarithmic quantizer, namely a quantizer with an infinite number of quantization levels, which may be overcome via a finite-level quantizer combined with a dynamic scaling factor (Fu and Xie 2009). In this line, Fu and Xie (2005) have introduced the sector bound approach for static logarithmic quantized feedback systems, giving simple formulae to the stabilization problem via state and output feedback controllers. Since then, the sector bound approach has been applied to solve a variety of problems such as, quantized robust control of linear uncertain systems (Fu and Xie 2010), state estimation with quantized measurements (Fu and de Souza 2009), local stability analysis of control linear systems with a static finite-level quantizer (de Souza et al. 2010), and feedback control of quantized nonlinear systems (Liu et al. 2012).
The aforementioned works assume the presence of a single quantizer in the feedback loop either in the input channel or in the output channel. However, since in NCS the information (control signal and measurements) is generally exchanged through a shared communication channel with limited bandwidth, it is natural to consider that both control and measurement signals are quantized (Zhai et al. 2005). To date, few results have addressed the stability and stabilization problems for input- and output-quantized feedback systems as, for instance, Richter and Misawa (2003); Zhai et al. (2005); Yue et al. (2006); Picasso and Bicchi (2007); Coutinho et al. (2010); Liu et al. (2011); Rasool et al. (2012); Yan et al. (2013). In particular, Coutinho et al. (2010) have extended the sector bound approach to deal with input- and output-quantized discrete-time linear systems assuming static logarithmic quantizers having an infinite number of quantization levels. To the authors’ knowledge, the study of local stability properties of input and output finite-level logarithmic quantized linear control systems has not yet been fully addressed in the literature despite some recent results on global stability analysis of input and output finite-level quantized systems (Richter and Misawa 2003; Xia et al. 2013).
The local stability of input- and output-quantized SISO discrete-time linear time-invariant feedback systems considering static finite-level logarithmic quantizers was investigated by Maestrelli et al. (2012), where LMI-based conditions are proposed to estimate a set of admissible initial states and its attractor in a neighborhood of the state-space origin assuming a controller and a quantizer are given a priori. This paper expands this earlier result by addressing the quantizer design problem when the set of admissible initial states and an upper bound on the volume of the attractor are known, which is an important issue for bandwidth management with a policy based on limiting the amount of information (Maestrelli et al. 2014). In addition, the main result of (Maestrelli et al. 2012) is revised and a procedure to jointly optimize the estimates of the set of admissible initial states and its attractor is proposed. Numerical examples are presented to demonstrate the potentials of the proposed stability analysis and quantizer design methods.
Notation
For a real matrix \(S\), \(S'\) is its transpose, \(\text{ diag } \{\cdots \}\) denotes a block-diagonal matrix and \(S>0\) (\(S \ge 0\)) means that \(S\) is symmetric and positive definite (nonnegative definite). For a symmetric block matrix, the symbol \(*\) stands for the transpose of the blocks outside the main diagonal block. For two sets \({\mathcal {A}}\) and \({\mathcal {B}}\) with \({\mathcal {B}}\subset {\mathcal {A}}\),

stand for \({\mathcal {A}}\) excluded \({\mathcal {B}}\). Finally, the argument \(k\) of \(x(k)\) as well as matrix and vector dimensions are often omitted.
2 Problem Statement
Consider the quantized feedback system in Fig. 1, where the system is represented by the following state-space model:
where \(x \in {\mathbb {R}}^n\) is the state, \(u \in {\mathbb {R}}\) is the control input, \(y \in {\mathbb {R}}\) is the measurement, and \(A\), \(B\), and \(C\) are given matrices with appropriate dimensions. This system is to be controlled by an output feedback controller with a state-space representation as follows:
where \(\xi \in {\mathbb {R}}^{n_\mathrm{c}}\) is the controller state, \(v \in {\mathbb {R}}\) is the controller input, \(w \in {\mathbb {R}}\) is the controller output, and \(A_\mathrm{c}\), \(B_\mathrm{c}\) and \(C_\mathrm{c}\) are given matrices with appropriate dimensions.

Feedback control system with input and output quantization
The system in (1) and the above controller are interconnected via the following relations:
where \(Q_1(\cdot )\) and \(Q_2(\cdot )\) are static finite-level logarithmic quantizers with quantization levels given by the sets as follows:
where \(N_i\) is the number of positive quantization levels and \(\mu _i\!>\!0\) is the largest admissible level. Note that a small (large) \(\rho _i\) implies coarse (dense) quantization. As an abuse of terminology, \(\rho _i\) will be referred to as quantization density.
This paper is concerned with investigating the stability of the closed-loop system of (1)–(3), where \(Q_1(\cdot )\) and \(Q_2(\cdot )\) are quantizers with finite alphabets obeying the following constructive law (see Fig. 2):
where
It is assumed that the input and output quantizers are independent and possibly different, i.e., they can have different parameters \(\rho _i\), \(\mu _i\), and \(N_i,\, i\!=\!1,2\).

Logarithmic quantizer with a finite number of quantization levels
3 Preliminaries
This section reviews a result derived in Coutinho et al. (2010) on quadratic stability of input- and output-quantized feedback linear SISO systems with ideal static logarithmic quantizers. To this end, consider feedback system in (1)–(3) under the assumption that \(Q_1(\cdot )\) and \(Q_2(\cdot )\) are ideal static logarithmic quantizers. Note that an ideal static logarithmic quantizer \(\bar{Q}(\cdot )\) is defined as follows (see Fig. 3):

Logarithmic quantizer with an infinite number of quantization levels
Theorem 1
Coutinho et al. (2010) The closed-loop system of (1)–(3), where \(Q_1(\cdot )\) and \(Q_2(\cdot )\) are static infinite-level logarithmic quantizers, is quadratically stable if and only if there exists a matrix \(P\!>\! 0\) such that
where
Theorem 1 establishes that the quadratic stabilization problem for an input–output-quantized feedback system with infinite-level logarithmic quantizers can be transformed, with no conservatism, into a standard robust control problem. Specifically, the system in (1) with given static infinite-level logarithmic quantizers \(Q_1(\cdot )\) and \(Q_2(\cdot )\) is quadratically stabilizable via an output feedback controller in (2) satisfying the interconnection relations in (3) if and only if the following uncertain system:
where \(\Delta _1\) and \(\Delta _2\) are uncertain parameters satisfying \(|\Delta _i| \le \delta _i,\, i\!=\!1,2\), is quadratically stabilizable via the controller in (2).
The result of Theorem 1 is strong in the sense that the quadratic stability of the uncertain system \(\bar{x}(k\!+\!1)\! =\! \bar{A}(\Delta _1,\Delta _2) \bar{x}(k)\), with uncertain parameters \(\Delta _1\) and \(\Delta _2\) satisfying \(|\Delta _i|\le \delta _i\), \(i\!=\! 1,2\), is a necessary and sufficient condition for the quadratic stability of the quantized closed-loop system. In other words, the sector bound condition
is non-conservative to model infinite-level logarithmic quantizers in the sense of quadratic stability.
4 Local Stability Analysis
The result in Sect. 3 applies to input- and output-quantized feedback systems where the quantizers follow a logarithmic law and have an infinite number of levels. For finite-level quantizers, due to quantizers’ dead-zone, the convergence of the state trajectory to the system origin (the equilibrium point under analysis) cannot be in general guaranteed. In such scenario, LMI-based conditions are derived in the sequel to ascertain the state trajectory convergence, in finite time, to a small invariant region in the neighborhood of the system origin.
Firstly, consider the following augmented system, which represents the closed-loop system of (1)–(3):
where
Associated to the augmented system in (12) and the quantizers as in (5), let the following sets:
where \(n_\zeta \!= n\! +\! n_c\) and \(C_{\mathrm{a}_i}\) denotes the \(i\)-th row of the matrix \(C_\mathrm{a}\), namely
The sets \({\mathcal {B}}_i\) and \({\mathcal {C}}_i\) are related to, respectively, the largest and smallest quantization levels of the quantizer \(Q_i,\, i\!=\!1,2\). These sets are symmetric with respect to the origin, are unbounded in the direction of the vectors of an orthogonal basis of the null space of \(C_{\mathrm{a}_i}\), and are bounded by two hyperplanes orthogonal to \(C_{\mathrm{a}_i}'\). The distance between these hyperplanes is \(2\mu _i(1\!-\!\delta _i)^{-1}/\sqrt{C_{\mathrm{a}_i} C_{\mathrm{a}_i}'}\,\) for \({\mathcal {B}}_i\) and \(2\epsilon _i\,/\sqrt{C_{\mathrm{a}_i}C_{\mathrm{a}_i}'}\,\) for \({\mathcal {C}}_i\).
Note that whenever the state \(\zeta \) of system (12) lies in \({\mathcal {C}}_1 \cap {\mathcal {C}}_2\), one has \(Q_\mathrm{a}(q)\!=\!0\), which leads to a zero input signal \(p\) to system (12). Hence, in general, the trajectory of \(\zeta \) will not converge to the origin and thus quadratic stability will not hold. To tackle this behavior, in the sequel we introduce a notion of stability, which was inspired by the concept of practical stability proposed in Elia and Mitter (2001).
To introduce the stability notion adopted in this paper, let the quadratic functions
where \(\zeta \) is as in (13), and consider the sets
where the notation \(Dg(\zeta (k))\), for a real function \(g(\cdot )\), is defined by \(Dg(\zeta (k)):= g(\zeta (k\!+\!1))-g(\zeta (k))\).
Definition 1
The quantized closed-loop system in (12) is said to be widely quadratically stable if there exist quadratic functions \(V(\zeta )\) and \(V_\mathrm{a}(\zeta )\) as in (16) satisfying the following conditions:
Wide quadratic stability ensures that for any \(\zeta (0) \in {\mathcal {D}}\), the trajectory of \(\zeta (k)\) will converge to the set \({\mathcal {A}}\) in finite time. Moreover, \(\zeta (k) \in {\mathcal {A}}, \forall \ k\ge \bar{k}\), for some finite integer \(\bar{k}>0\). In view of that, \({\mathcal {A}}\) is said to be an attractor of \({\mathcal {D}}\) and \({\mathcal {D}}\) will be referred to as a set of admissible initial states. Observe that Definition 1 is similar to the notion of practical stability proposed in Elia and Mitter (2001), where the admissible initial states and attractor sets are ellipsoidal sets with the same shape. On the other hand, different shapes for \({\mathcal {D}}\) and \({\mathcal {A}}\) are allowed in the Definition 1, which may lead to less conservative sets \({\mathcal {D}}\) and \({\mathcal {A}}\) due to the shapes of \({\mathcal {B}}_1\) and \({\mathcal {B}}_2\). In addition, we can recover the practical stability definition by setting \(P_\mathrm{a}\!=\!\beta P\), with \(\beta >1\), which forces the sets \({\mathcal {A}}\) and \({\mathcal {D}}\) to have the same shape.
In order to ensure wide quadratic stability of the closed-loop system in (12), firstly observe that the condition \(DV(\zeta )\!<\!0\) is written as
Moreover, note that for all \(\zeta \! \in \! ({\mathcal {B}}_1 \cap {\mathcal {B}}_2)\backslash ({\mathcal {C}}_1 \cup {\mathcal {C}}_2)\), the input vector \(p(k)\) of system (12) satisfies the following multivariable sector-bound condition (Coutinho et al. 2010; Tarbouriech et al. 2011):
where \(T > 0\) is a free diagonal matrix to be determined and
Thus, considering that the second inclusion in (20) holds, condition (21) is satisfied if (24) holds subject to (25), which is guaranteed by the inequality
where
Similarly, to ensure (22), the following condition is considered:
where the matrices \(\varUpsilon _{\mathrm{a}_1}\), \(\varUpsilon _{\mathrm{a}_2}\), and \(\varUpsilon _{\mathrm{a}_3}\) are similar to \(\varUpsilon _{1}\), \(\varUpsilon _{2}\), and \(\varUpsilon _{3}\), respectively, with the matrices \(P\) and \(T\) replaced by, respectively, \(P_\mathrm{a}\) and \(T_\mathrm{a}\), where \(T_\mathrm{a} > 0\) is a diagonal matrix to be determined.
The inequalities in (26) and (28) together with (20) and considering the definition of the set \({\mathcal {C}}_\mathrm{p}\) will ensure the feasibility of (22). Further, conditions (22) and (23) ensure that \({\mathcal {C}}_\mathrm{p}\) is bounded and \({\mathcal {C}}_p \subset {\mathcal {A}}\), otherwise \(\zeta (k)\) could eventually leave \({\mathcal {A}}\).
In view of the above, we have the following stability result:
Theorem 2
Consider system (1), a given controller (2) and the feedback law in (3) with finite-level quantizers \(Q_1(\cdot )\) and \(Q_2(\cdot )\) as defined in (5), where \(\mu _i\), \(\rho _i\), and \(N_i\) are given. The closed-loop system (12) is widely quadratically stable if there exist matrices \(P\) and \(P_\mathrm{a}\), diagonal matrices \(T\!>\!0\) and \(T_\mathrm{a}\!>\!0\), and positive scalars \(\tau ,\tau _i,\bar{\tau }_i,\hat{\tau }_i\) and \(\tilde{\tau }_i, \ i\!=\!1,2\) satisfying the following inequalities:
where \(\delta _i\) and \(\epsilon _i\) are defined in (6) and
Moreover, the set of admissible initial states \({\mathcal {D}}\) and the attractor \({\mathcal {A}}\) are given by (17) and (18), respectively.
Proof
Firstly, in view of (14), (17), and (18), the second inequality of (29) together with (30) ensure that \({\mathcal {A}}\subset {\mathcal {D}}\) and \({\mathcal {D}}\subset {\mathcal {B}}_i\), \(i\! =\! 1,2\), respectively. Next, the first inequality of (31) ensures the feasibility of (26), which in turns implies (21). Further, the second inequality of (31) guarantees that (28) holds, which together with (20) and the definition of \({\mathcal {C}}_\mathrm{p}\) imply that (22) is satisfied.
In the sequel, it will be shown that (32)–(34) guarantee that (23) holds. For that, we partition the set \({\mathcal {C}}_\mathrm{p}\) into three complementary subsets as follows:
and consider two cases:
(a) \(\zeta (k)\! \in {\mathcal {C}}_{\mathrm{p}_3}:\) Letting \(\phi \in {\mathbb {R}}^{n_\zeta }\) and adding the first inequality of (32) to (33) pre-multiplied by \(\phi '\) and post-multiplied by \(\phi \), and then dividing both sides by \(\tau > 0\), we get
Applying the \(S\)-procedure, the latter condition yields
Now, let \(\phi \!=\!\zeta (k)\) as defined in (13). Since the last condition in (36) is equivalent to \(\zeta (k)\in {\mathcal {C}}_1 \cap {\mathcal {C}}_2\), and in such a case the input signal \(p(k)\) of (12) is zero, then it holds that \(A_\mathrm{a}\phi \!=\! \zeta (k\!+\!1)\). Therefore, (36) leads to
This guarantees that \(\zeta (k+1) \in {\mathcal {A}}\) whenever \(\zeta (k) \in {\mathcal {C}}_{\mathrm{p}_3}\).
(b) \(\zeta (k)\!\in {\mathcal {C}}_{\mathrm{p}_i},\, i\!=\!1,2\): Let \(\phi \in {\mathbb {R}}^{n_\zeta }\) and \(\psi \in {\mathbb {R}}\). Adding the second inequality of (32) to (34) and pre-multiplied by \([\phi \;\; \psi ]'\) and post-multiplied by \([ \phi ' \;\; \psi ']'\), and then diving both sides by \(\tilde{\tau }_i >0\), we obtain
for all \(\phi \in {\mathbb {R}}^{n_\zeta }\) and \(\psi \in {\mathbb {R}}\). By the \(S\)-procedure, the latter inequality implies that for \(i,j\!=\!1,2\), \(i\!\ne \! j\)
Note that the last inequality of (37) is equivalent to \(\phi \in {\mathcal {C}}_i\). Let \(\phi \!=\!\zeta (k)\) and \(\psi \!=\! p_j(k)\) as in (13). Since for \(\zeta (k)\in {\mathcal {C}}_i\), the input signal \(p_i(k)\) of (12) is zero and \(p_j(k)\) satisfies the sector-bound inequality in (11), by considering (12) we obtain from (37) that
which ensures \(\zeta (k\!+\!1) \in \mathcal{A}\) whenever \(\zeta (k) \in {\mathcal {C}}_{p_i}\), \(i\!=\!1,2\).
In the light of the above, we conclude that system (12) is widely quadratically stable. \(\square \)
Remark 1
Observe that (33) and (34) are not jointly convex in \(\tau , {\tilde{\tau }}_1, {\tilde{\tau }}_2\), and \(P_a\). However, the conditions in (29)–(34) turn out to be LMIs when the scalars \(\tau , {\tilde{\tau }}_1, {\tilde{\tau }}_2\) are given a priori. Thus, applying a gridding procedure, we can perform a search on the latter scalars to obtain a feasible solution to the inequalities in (29)–(34). \(\square \)
In general, we may desire to obtain a maximized set \({\mathcal {D}}\) (in the sense of its volume), or a minimized set \({\mathcal {A}}\). As the set \({\mathcal {D}}\) is an ellipsoid, a way to approximately maximize its size is to minimize \({\mathrm{trace}}(P)\). The reason for this is that for \(P\!\in \!{\mathbb {R}}^{n_\zeta \times n_\zeta }\) we have \(n_\zeta ({\mathrm{trace}}(P))^{-1}\!\le \!{\mathrm{trace}}(P^{-1})\) and \({\mathrm{trace}}(P^{-1})\) is the sum of the squared semi-axis lengths of the ellipsoid \({\mathcal {D}}\). Specifically, the size of \({\mathcal {D}}\) in Theorem 2 can be approximately maximized by means of the following optimization problem:
Similarly, we can approximately minimize the size of \({\mathcal {A}}\) by maximizing \({\mathrm{trace}}(P_a)\), which can be achieved via the optimization problem as follows:
Very often, it is desired to jointly optimize the size of \({\mathcal {D}}\) and \({\mathcal {A}}\), which is generally a difficult problem to solve. A possible way to approximately jointly maximize \({\mathcal {D}}\) and minimize \({\mathcal {A}}\) is obtained by minimizing the scalar \(\gamma \!:=\!\gamma _1/\gamma _2\), where \(\gamma _1\) and \(\gamma _2\) are as in (38) and (39), respectively. More specifically, this optimization problem can be formulated as follows. First, define
Note that (29)–(34) can be written as
where \(\widehat{\varUpsilon }_k, \widehat{\varUpsilon }_{\mathrm{a}_k}\) and \(\widehat{U}_k\), \(k=1,2,3\), are similar to, respectively, \(\varUpsilon _k, \varUpsilon _{\mathrm{a}_k}\) and \({U}_k\), \(k=1, 2, 3\) as in Theorem 2 with \(P\), \(P_\mathrm{a}\), \(T\), \(T_a\), \(\tau _i\), \(\bar{\tau }_i\) and \(\hat{\tau }_i\) replaced by, respectively, \(X\), \(X_\mathrm{a}\), \(W\), \(W_\mathrm{a}\), \(\alpha _i\), \(\bar{\alpha }_i\), and \(\hat{\alpha }_i\), \(i\!=\!1,2\).
Considering (38) and (39), the minimization of \(\gamma \) can be achieved via the optimization problem
5 Quantizer Design
Theorem 2 provides a method for deriving a set \(\mathcal {D}\) of admissible initial states and its attractor \({\mathcal {A}}\) for the closed-loop system of (1)–(3) considering finite-time logarithmic quantizers as in (5) with given maximum quantization levels \(\mu _1\) and \(\mu _2\), and zero-level errors \(\epsilon _1\) and \(\epsilon _2\). In this section, we apply Theorem 2 for designing the quantizer parameters \(\mu _i\) and \(\epsilon _i,\ i\! =\! 1,2\). To this end, let \({\mathcal {D}}_0 = \{ \zeta \in {\mathbb {R}}^{n_\zeta } : \zeta ' P_0 \zeta \le 1\}\), \(P_0\! >\! 0\), be a given set of admissible initial states and \(\vartheta \) be an upper bound on the volume of the set \({\mathcal {A}}\! =\! \{ \zeta \in {\mathbb {R}}^{n_\zeta } : \zeta ' P_\mathrm{a} \zeta \le 1\}\),Footnote 1 which will be the attractor of \({\mathcal {D}}_0\), where \(P_\mathrm{a}\! >\! 0\) is to be determined. Assuming there exists an output feedback quadratically stabilizing controller for system (1), the following procedure can be applied to design static finite-level logarithmic quantizers \(Q_1(\cdot )\) and \(Q_2(\cdot )\) such that the wide quadratic stability of the closed-loop system in (1)–(3) is guaranteed:
Step 1: Assuming logarithmic quantizers with an infinity number of levels, determine a controller and the quantization densities \(\rho _1\) and \(\rho _2\) ensuring the closed-loop quadratic stability by applying the methodology proposed in Coutinho et al. (2010) and let \(\delta _i = (1 -\rho _i)/(1+\rho _i), \ i\! =\! 1,2\).
Step 2: Determine matrices \(P\) and \(P_a\) and positive scalars \(\eta _i\), \(\sigma _i\), \(\beta _i\), \({\bar{\beta }}_i\), \({\tilde{\tau }}_i\), \({\hat{\tau }}_i\), \(i\! =\! 1,2\), and \(\tau \) satisfying the inequalities in (31) and the following conditions:
where \(\widetilde{U}_k(i,j)\) is similar to \({U}_k(i,j),\ k\! =\! 1,2,3\) as defined in (35) with \(\bar{\tau }_i \epsilon _i^{-2}\) replaced by \({\bar{\beta }}_i\) and \(c\) is the constant related to the volume of \({\mathcal {A}}\). Note that (49)–(53) imply that the conditions in (29)–(34) of Theorem 2 hold with \(\mu _i\!=\!\eta _i^{-2}\), \(\epsilon _i\!=\!\sigma _i^{-2}\), \(\tau _i\!=\!\epsilon _i^2\beta _i\), and \(\bar{\tau }_i\!=\!\epsilon _i^2\bar{\beta }_i\), \(i\!=\!1,2\), whereas (54) ensures that \(\vartheta \) is an upper bound for the volume of \({\mathcal {A}}\).
Step 3: Suitable quantizers parameters \(\mu _i\) and \(\epsilon _i\) are given by \(\mu _i\! =\! 1/\sqrt{\eta _i}\,\) and \(\epsilon _i\! =\! 1/\sqrt{\sigma _i},\ i\! =\! 1,2\). Moreover, the numbers of positive quantization levels of quantizers \(Q_1(\cdot )\) and \(Q_2(\cdot )\) are the smallest integers \(N_1\) and \(N_2\), respectively, satisfying
Generally, we are interested in determining the smallest number of quantization levels guaranteeing the wide quadratic stability, which can be achieved by jointly minimizing \(\mu _i\) and maximizing \(\epsilon _i\), \(i=1,2\). To this end, the inequality constraints (31) and (49)–(54) of Step 2 are embedded in the following optimization problem:
where \(\theta = \sigma _1 + \sigma _2 - \eta _1 - \eta _2\).
6 Examples
Example 1
Consider the discrete-time system of Example 3.1 in Fu and Xie (2005), which deals with a non-minimum phase open-loop unstable system with a transfer function \(G(z) = \frac{z-3}{z(z - 2)}\). This system can be represented by the following state-space realization:
Firstly, using the methodology proposed in Coutinho et al. (2010) the following quadratically stabilizing output feedback controller is designed to maximize \(\delta _1\) and \(\delta _2\) assuming the quantizers to be ideal:
Next, we assume that the finite-level quantizers \(Q_1(\cdot )\) and \(Q_2(\cdot )\) have the following parameters:
and according to (6) we have \(\epsilon _1 = 6.4910 \times 10^{-4}\) and \( \epsilon _2 = 5.702 \times 10^{-3}\). Since the number of bits, \(N_{b_i}\), required for the quantizer \(Q_i(\cdot ),\ i\!=\!1,2\) is given by \(N_{b_i} = \log _2(2N_i)\), we have that \(Q_1(\cdot )\) and \(Q_2(\cdot )\) use 10 bits and 8 bits, respectively.
The optimization procedure in (48) together with a griding search procedure on the parameters \(\tau \), \(\tilde{\tau }_1\), and \(\tilde{\tau }_2\) have been applied to approximately jointly optimize the set \({\mathcal {D}}\) of admissible initial state and its attractor \({\mathcal {A}}\). Notice that in view of (46) and (47), the later parameters are typically small. For this example, the LMIs in (41)–(47) are feasible if \(0.1 \le \tau ,\tilde{\tau _1},\tilde{\tau }_2\le 0.2\). Furthermore, to simplify the griding search, we have considered \(0.1 \le \tau = \tilde{\tau }_1 = \tilde{\tau }_2\le 0.2\) leading to \(\tau = \tilde{\tau }_1 = \tilde{\tau }_2 = 0.155\) and
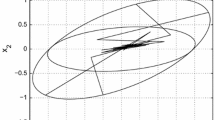
Figure 4 displays a slice of the set \({\mathcal {D}}\) for \(\xi \! =\! 0\) together with the projection of a stable and an unstable state trajectories on the plane defined by \([~x_1~~x_2~~0~~0~]'\). To evaluate the conservatism of the achieved results, Fig. 4 also shows a zoomed view of the starting sequence of the two state trajectories and the slice of \({\mathcal {D}}\).
As in Fig. 4 the attractor is too small to be visible, in Fig. 5 we display a detailed view of a slice of \({\mathcal {A}}\) and the projection of the stable state trajectory on the plane defined by \([~x_1~~x_2~~0~~0~]'\).

A slice of the set \({\mathcal {D}}\) (with \(\xi \!= \! 0\)), and a stable and an unstable state trajectories

A slice of the set \({\mathcal {A}}\) (with \(\xi \!= \! 0\)) and a stable state trajectory
Example 2
This example is aimed at illustrating the method of quantizers design of Sect. 5. To this end, consider the following discrete-time linear approximation of an inverted pendulum system with null damping factor taken from de Souza et al. (2010):
and the following quadratically stabilizing output feedback controller obtained via the method of Coutinho et al. (2010) considering that the quantizers are ideal with the constraint \(\delta _1\! =\! \delta _2 \! =\! \delta \) and \(\delta \) being maximized:
To design the input and output finite-level logarithmic quantizers, we consider the following set \({\mathcal {D}}_0\) of admissible initial states:
and the quantization densities \(\rho _1 \! =\! \rho _2 \! =\! 0.7\). Moreover, it is assumed that the maximal volume of the attractor \({\mathcal {A}}\) is 10% of that of \({\mathcal {D}}_0\), i.e., \(\vartheta \! =\! 2.3\) (the volume of \({\mathcal {A}}\) is \(\pi ^2/\sqrt{4 \det (P_0)}\)). Applying the optimization problem (56) and performing a griding search over \({\tilde{\tau }}_1, {\tilde{\tau }}_2\), and \(\tau \) similar as in Example 1, yields:
for \(\tau \! =\!\tilde{\tau }_1 \! =\!{\tilde{\tau }}_2 \! =\! 0.0068\).
Figure 6 shows slices of the sets \({\mathcal {D}}\) and \({\mathcal {D}}_0\) with \(\xi \! =\! 0\) along with the projection of a stable state trajectory on the plane defined by \(\begin{bmatrix} x_1&x_2&0&0 \end{bmatrix}'\). A zoomed view of the starting sequence of the state trajectory and the slices of \({\mathcal {D}}\) and \({\mathcal {D}}_0\) are also displayed in Fig. 6. Furthermore, Fig. 7 gives a detailed view of the slice of \({\mathcal {A}}\) and the projection of the stable state trajectory.

Slices of the sets \({\mathcal {D}}\) and \({\mathcal {D}}_0\) (with \(\xi \!= \! 0\)) and a stable state trajectory

A slice of the set \({\mathcal {A}}\) (with \(\xi \!= \! 0\)) and a stable state trajectory
7 Concluding Remarks
This paper has extended the results of Maestrelli et al. (2012) on local stability analysis of SISO discrete-time linear time-invariant systems with input and output static finite-level logarithmic quantizers. Firstly, an optimization problem with LMI constraints has been proposed to jointly optimize the estimates of the set of admissible initial states and the associated invariant attractor set in a neighborhood of the state-space origin, based on a relaxed stability notion, referred to as wide quadratic stability. Then, assuming these sets are given, we have also provided a method to design the input and output quantizers ensuring wide quadratic stability. Numerical examples have demonstrated the potentials of the proposed approach. Future research is concentrated on extending these results to nonlinear quadratic systems.
Notes
The volume of an ellipsoid \({\mathcal {A}}=\{ \zeta \in {\mathbb {R}}^{n_\zeta } : \zeta ' P_\mathrm{a} \zeta \le 1, P_\mathrm{a} >0 \}\) is given by \(c/\sqrt{\det (P_\mathrm{a})}\), where \(c\) is a constant that depends on \(n_\zeta \) (see, e.g., Bernstein (2009)).
References
Bernstein, D. S. (2009). Matrix mathematics: theory, facts, and formulas. Princeton, NJ: Princeton University Press.
Brockett, R. W., & Liberzon, D. (2000). Quantized feedback stabilization of linear systems. IEEE Transactions on Automatic Control, 45(7), 1279–1289.
Coutinho, D., Fu, M., & de Souza, C. E. (2010). Input and output quantized feedback linear systems. IEEE Transactions on Automatic Control, 55(3), 761–766.
Delchamps, D. F. (1990). Stabilizing a linear system with quantized state feedback. IEEE Transactions on Automatic Control, 35(8), 916–924.
Elia, N., & Mitter, S. K. (2001). Stabilization of linear systems with limited information. IEEE Transactions on Automatic Control, 46(9), 1384–1400.
Fu, M., & de Souza, C. E. (2009). State estimation for linear discrete-time systems using quantized measurements. Automatica, 45(12), 2937–2945.
Fu, M., & Xie, L. (2005). The sector bound approach to quantized feedback control. IEEE Transactions on Automatic Control, 50(11), 1698–1711.
Fu, M., & Xie, L. (2009). Finite-level quantized feedback control for linear systems. IEEE Transactions on Automatic Control, 54(5), 1165–1170.
Fu, M., & Xie, L. (2010). Quantized feedback control for linear uncertain systems. International Journal of Robust and Nonlinear Control, 20(8), 843–857.
Hespanha, J. P., Naghshtabrizi, P., & Xu, Y. (2007). A survey of recent results in networked control systems. Proceedings of IEEE, 95(1), 138–162.
Ishii, H., & Francis, B. A. (2003). Quadratic stabilization of sampled-data systems with quantization. Automatica, 39(10), 1793–1800.
Kalman, R.E. (1956). Nonlinear aspects of sampled-data control systems. In Proceedings of the Symposium on Nonlinear Circuit Theory (Vol. VII). Brooklyn, NY.
Liu, J., Xie, L., Zhang, M., & Wu, Z. (2011). Stabilization and stability connection of networked control systems with two quantizers. In Proceedings of 2011 American Control Conference (pp. 2826–2830). San Francisco, CA.
Liu, T., Jiang, Z. P., & Hill, D. J. (2012). A sector bound approach to feedback control of nonlinear systems with state quantization. Automatica, 48(1), 145–152.
Maestrelli, R., Coutinho, D., & de Souza, C.E. (2012). Stability analysis of input and output finite level quantized discrete-time linear control systems. In Proceedings 51st IEEE Conference Decision and Control (pp. 6096–6101).
Maestrelli, R., Almeida, L., Coutinho, D., & Moreno, U. (2014). Dynamic bandwidth management in networked control systems using quantization. In 6th Workshop on Adaptive and Reconfigurable Embedded Systems—APRES 2014. Berlin, Germany.
Picasso, B., & Bicchi, A. (2007). On the stabilization of linear systems under assigned I/O quantization. IEEE Transactions on Automatic Control, 52(10), 1994–2000.
Rasool, F., Huang, D., & Nguang, S. K. (2012). Robust \(\text{ H }_\infty \) output feedback control of networked control systems with multiple quantizers. Journal of the Franklin Institute, 349(3), 1153–1173.
Richter, H., & Misawa, E. A. (2003). Stability of discrete-time systems with quantized input and state measurements. IEEE Transactions on Automatic Control, 48(8), 1453–1458.
Schenato, L., Sinopoli, B., Franceschetti, M., Poolla, K., & Sastry, S. (2007). Foundations of control and estimation over lossy networks. Proceedings of IEEE, 95(1), 163–187.
Slaughter, J. B. (1964). Quantization errors in digital control systems. IEEE Transactions on Automatic Control, 9(1), 70–74.
de Souza, C. E., Coutinho, D., & Fu, M. (2010). Stability analysis of finite-level quantized discrete-time linear control systems. European Journal of Control, 16(3), 258–274.
Tarbouriech, S., Garcia, G., Gomes da Silva, J. M, Jr, & Queinnec, I. (2011). Stability and stabilization of linear systems with saturating actuators. Berlin: Springer-Verlag.
Wei, L., Fu, M., & Zhang, H. (2014). Quantized output feedback control with multiplicative measurement noises. International Journal of Robust and Nonlinear Control. doi:10.1002/rnc.3145.
Xia, Y., Yan, J., Shi, P., & Fu, M. (2013). Stability analysis of discrete-time systems with quantized feedback and measurements. IEEE Transactions on Industrial Informatics, 9(1), 313–324.
Yan, H., Shi, H., Zhang, H., & Yang, F. (2013). Quantized \(\text{ H }_\infty \) control for networked systems with communication constraints. Asian Journal of Control, 15(5), 1468–1476.
You, K.-Y., & Xie, L.-H. (2013). Survey of recent progress in networked control systems. Acta Automatica Sinica, 39(2), 101–117.
Yue, D., Peng, C., & Tang, G. Y. (2006). Guaranteed cost control of linear systems over networks with state and input quantisations. IEE Proceedings—Control Theory and Applications, 153, 658–664.
Zhai, G., Matsumoto, Y., Chen, X., Imae, J., & Kobayashi, T. (2005). Hybrid stabilization of discrete-time LTI systems with two quantized signals. International Journal of Applied Mathematics and Computer Science, 15(4), 509–516.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Maestrelli, R., Coutinho, D. & de Souza, C.E. Input and Output Finite-Level Quantized Linear Control Systems: Stability Analysis and Quantizer Design. J Control Autom Electr Syst 26, 105–114 (2015). https://doi.org/10.1007/s40313-014-0163-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40313-014-0163-1