
Abstract
In this paper, we consider the solution of the initial and boundary value problem for the time-space fractional diffusion equation in the sense of Caputo based on the Chebyshev collocation method. Firstly, the problem is converted to an initial value problem for a fractional integral-differential equation which absorbs the boundary conditions. Then the shifted Chebyshev polynomials and collocation method for the space variable are used. The coefficient functions of the Chebyshev expansion are solved through the Picard iterative process and the matrix Mittag-Leffler functions for the time variable. We also present a numerical method to cope with the improper convolution integral on the time variable. Finally, a numerical example is verified via the proposed method. The results demonstrate the effectiveness and great potential of the Chebyshev polynomials and the matrix Mittag-Leffler functions for the solution of the fractional differential equation.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Fractional calculus attracts much interest due to its ability to describe hereditary properties and memory phenomena in science and engineering fields such as in the areas of engineering vibrations [1], viscoelastic mechanics and rheology [2,3,4], control theory [5], anomalous diffusion [2, 6, 7], etc. Initial and boundary value problems for the fractional diffusion equation are an important research subject. The stability and existence of a solution of fractional differential equation were shown in [6, 8, 9].
It is well known that it is difficult to obtain an exact analytical solution within the scope of elementary functions for such a fractional differential equation. The finite difference method was used in [10,11,12,13] because it is easy to be understood and put into practice. In [12], Meerschaert and Tadjeran studied the approximate solution of fractional partial differential equation by the finite difference method and discussed the convergence under given conditions. Rawashdeh [14] used collocation method in polynomial spline space to study the numerical solution of a fractional integro-differential equation. Jafari and Daftardar-Gejji [15] used Adomian’s decomposition to solve fractional diffusion and wave equations. In [16], the boundedness theorem of general fractional integrals was proved. In [17], the discrete scheme was used to solve the time fractional diffusion equation in the sense of Caputo. Garrappa [18] gave a survey for numerical methods of the fractional differential equations including the multi-step methods, and designed a set of Matlab programs for problems of fractional order. Deng and Hesthaven [19] used local discontinuous Galerkin method to solve the spatial fractional diffusion equation. Chen and Li [20] used the compact difference scheme to solve the time fractional diffusion-wave equation.
The Chebyshev polynomials, applied in approximation theory and spectral methods of differential equation, play an increasingly important role in analytical and numerical analyses. Khader [21] proposed the shifted Chebyshev collocation method to solve the space fractional diffusion equation. Sweilam et al. [22, 23] used the second and third kind shifted Chebyshev polynomials to solve the space fractional diffusion equation.
In the present paper, we consider using the shifted Chebyshev polynomials of the first kind and the Picard iterative process to approximate the solution for the initial and boundary value problem of the time-space fractional diffusion equation. In the next section, we introduce some basic concepts used in this article. In Section 3, we describe the presented method by using the shifted Chebyshev polynomials and collocation method for the space variable combined with the Picard iterative process and matrix Mittag-Leffler function for the time variable. The method is verified by a numerical example. Conclusions are presented in Section 4.
2 Basic concepts
Definition 1
The Riemann-Liouville fractional integral of order \(\alpha \) is defined as the convolution,
if \(\alpha >0\), and \(J_{x}^0 f(x) = f(x)\) if \(\alpha =0\), where \(\Gamma (\cdot )\) is Euler’s Gamma function. The fractional integral has the properties
Definition 2
Let \(m-1<\alpha \le m\) and \(m \in \textbf{N}^+\). Then the \(\alpha \)-order Caputo fractional derivative is defined as the composition of the fractional integral and integer-order derivative
The fractional integral and the Caputo fractional derivative satisfy linear law, e.g.
where \(\lambda \) and \(\mu \) are constants. The Caputo fractional derivative of a monomial is [7]
where n is a nonnegative integer and \(\lceil \alpha \rceil \) is the smallest integer not less than \(\alpha \). The \(\alpha \)-order integral of \(\alpha \)-order Caputo fractional derivative of function f(x) has the following relation with the initial values [24],
More definitions and properties of fractional derivative were introduced in [7].
Definition 3
The Mittag-Leffler function with two parameters is defined as [25]:
The definition can be generalized to the case of matrix variable, i.e. the matrix Mittag-Leffler function
where A is an nth-order matrix and \({A^0} = I\), the nth-order unit matrix.
Definition 4
The Chebyshev polynomials of the first kind are defined by the formulae [26]
The zeros of \({T_n}(z)\) have the exact expression \({z_i} = \cos \left( {\frac{{2i + 1}}{{2n}}\pi } \right) ,\ i = 0,1,\ldots ,n - 1,\) and the explicit expressions of \({T_n}(z)\) have the forms
where \(\left[ {\frac{n}{2}} \right] \) is the integral part of \(\frac{n}{2}\).
The shifted Chebyshev polynomials are defined by
which have the zeros \({x_i} = \frac{1}{2} + \frac{1}{2}\cos \left( {\frac{{2i + 1}}{{2n}}\pi } \right) ,i = 0,1,\ldots ,n - 1,\) and the explicit expressions
Suppose y(x) is \(L_2\) integrable on the interval [0, 1] with respect to the weight function \(\rho (x)=\frac{1}{\sqrt{x - x^2 }}\), then it has series expansion in the shifted Chebyshev polynomials
where the coefficient \(c_i\) are given as the follows:
When the series in (13) is approximated by its truncation
the error is no more than the sum of the absolute values of the coefficients after the first \((m+1)\)-terms in (13) [21]. For more results on convergence, see [26].
3 The solution of the time-space fractional diffusion equation
We consider the time-space fractional diffusion equation
where \(0 < \beta \le 1\), \(1 < \alpha \le 2\), c is a constant and s(x, t) is a source term, subject to the following initial and the Dirichlet boundary conditions:
The solving process is divided into the following three steps.
3.1 The integration with respect to the space variable merging the boundary conditions
We use \(J_{x,\eta }^{\alpha } f(x)\) to represent the value of the fractional integral \(J_{x}^{\alpha } f(x)\) at \(x=\eta \),
Applying the integral operator \(J_x^\alpha ( \cdot )\) to both sides of equation (16) leads to
According to equation (7), the composition of the left hand side of (20) involves the boundary values at \(x=0\)
where \({u_x^\prime } (0,t)\) is to be determined.
Substituting (21) into (20) yields
Collocating equation (22) at \(x=1\) and using the boundary value at \(x=1\) we have
Substituting (23) into (22) we obtain
So the initial and boundary value problem, (16)–(18), is converted to the initial value problem of equation (24) with the initial value (17).
3.2 The shifted Chebyshev polynomial expansion and collocation method
We use the truncation of the shifted Chebyshev polynomial expansion with respect to the space variable x to approximate the solution u(x, t) as
So equation (24) can be written in the following form
Rearranging equation (26) leads to
In order to solve the \(m+1\) functions \(a_i(t)\), \(i=0,1,\dots , m\), we collocate equation (27) at the \(m+1\) zeros \({x_p}\) of the shifted Chebyshev polynomial \(T_{m+1}^*(x)\) to get \(m+1\) fractional differential equations as follows,
where the zeros have the precise expressions \({x_p} = \frac{1}{2} + \frac{1}{2}\cos \left( {\frac{{2p + 1}}{{2m + 2}}\pi } \right) \), \(p=0,1,\ldots ,m\).
In matrix notation, the equation system has the form
where \({\textbf{a}}(t) = {({a_0}(t),{a_1}(t),\ldots ,{a_m}(t))^T}\),
Premultiplication by \(A^{-1}\) on both sides of equation (29) leads to
The initial values \({{a}_i}(0)\) are the coefficients of the shifted Chebyshev polynomial expansion of u(x, 0),
where
3.3 Solution for \({\textbf{a}}(t)\) by the Picard iterative process
Now we derive the series solution of the initial value problem, (30) and (32), by using the Picard iterative process. Operating the fractional integral \(J_t^\beta (\cdot )\) on both sides of equation (30) yields
Denote the kth approximate solution of the Picard iteration by \({{\varvec{\varphi }} _k}(t)\), then the iterative scheme starting from the 0th approximate solution is
The expression of the kth approximate solution is derived as follows,
Denoting the fractional integrals as convolutions and taking the limit \(k \rightarrow \infty \) for \({{\varvec{\varphi }} _k}(t)\) we get the series form of the solution,
In matrix Mittag-Leffler functions, equation (37) can be written as follows,
where
are the transient component caused by the initial condition u(x, 0) and the steady-state component caused by the boundary condition and the source term, respectively. After finding out \({\textbf{a}}(t)\), we can write out the approximate solution of the original initial and boundary problem by equation (25).
We note that the convolution in equation (40) is an improper integral. By using the relation
which can be verified by termwise derivation, the singularity in the convolution in equation (40) can be removed through integration by parts
Here we suppose that \({\textbf{c}}'(t)\) is continuous on the interested interval [0, T].
If it is difficult to compute analytically the convolution integrals in (40) or (42), we can use a numerical integral method to cope with the definite integral in (42). For example, by introducing \(t_n = n h\), \(n=0,1,\ldots ,N\), then for \(1 \le n \le N\) we have from the composite trapezoidal integration,
where \({\omega _{n,0}} = {\omega _{n,n}} = \frac{h}{2},\ {\omega _{n,j}} = h,\ j = 1,2,\ldots ,n - 1.\) We note that for a second-order continuously differentiable function, the truncation error of the composite trapezoidal integration is proportional to \(t_n h^2\).
Example
Consider the initial and boundary value problem of the fractional diffusion equation
where the source function is \(s(x,t) = \frac{4}{3}\sqrt{\frac{x}{\pi }} \left( { 2\left( {1-x } \right) {{\left( {tx} \right) }^{\frac{3}{2}}} + 3\left( {1 + {t^2}} \right) \left( {2x - 1} \right) } \right) \). The problem has the exact solution \({u_{\textrm{exa}}}(x,t) = {x^2}(1 - x)(1 + {t^2})\).
The problem is solved by applying the suggested method with \(m=3\), i.e.
The coefficients are derived as in equation (38),
where
Approximating the convolution integral in equation (48) by using the composite trapezoidal integration rule as in equation (43), we have at \(t_n=nh,\) \(n\ge 1\),
where \({\omega _{n,0}} = {\omega _{n,n}} = \frac{h}{2},\ {\omega _{n,j}} = h,\ j = 1,2,\ldots ,n - 1. \) Using this result of numerical integration, the approximate solution of the original problem at \(t=t_n\) is denoted by \(u_{\textrm{Che}}(x, t_n) = \sum \limits _{i = 0}^3 {{{\hat{a}}_i}(t_n)T_i^*(x)}\).

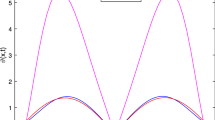
At \(t=1\), the exact solution \({u_{\textrm{exa}}}(x,1)\) (solid line) and the approximate solutions \(u_{\textrm{Che}}(x,1)\) (dash line) computed by using the different time step-sizes h

The absolute errors of the approximate solutions \(u_{\textrm{Che}}(x,1)\) computed by using the different time step-sizes \(h=0.1\) (solid line), \(h=0.05\) (dash line), \(h=0.025\) (dot line) and \(h=0.0125\) (dot-dash line)
In Figure 1, the approximate solutions \(u_{\textrm{Che}}(x, 1)\) at \(t=1\) are plotted together with the exact solution \({u_{\textrm{exa}}}(x,1)\), where the convolution integration was computed by using the different time step-sizes \(h=0.1\), 0.05, 0.025 and 0.0125. The corresponding absolute errors \(|{u}_{\textrm{exa}}(x,1) - u_{\textrm{Che}}(x,1)|\) for the four approximations are plotted in Figure 2. Corresponding to the four decreasing values of the step-size h, the maxima of the absolute errors are calculated to be 0.0105972, 0.00448355, 0.00182718 and 0.000718710. An obvious convergence is displayed.
4 Conclusions
We considered the solution of the initial and boundary value problem for the time-space fractional diffusion equation in the sense of Caputo based on the Chebyshev collocation method. First we converted the problem to an initial value problem of fractional integral-differential equation merging the boundary conditions. Then the solution was expanded by using the shifted Chebyshev polynomials with respect to the space variable and the collocation method led to a fractional ordinary differential equation system about the coefficient functions of the time variable. Further, the coefficient functions of the time variable were obtained in terms of the matrix Mittag-Leffler functions by using the Picard iterative process. We also presented a numerical method to cope with the improper convolution integral on the time variable in the steady-state component of the coefficient functions.
We verified the proposed method with a numerical example with exact solution. For the approximate solutions obtained by using the proposed method, the absolute errors become smaller with the decreasing of the step-size h of the time variable. This conclusion demonstrates the effectiveness and great potential of the Chebyshev collocation method for the solution of the fractional differential equation. All plots were generated by using Wolfram Mathematica 12.
References
Li, M.: Theory of Fractional Engineering Vibrations. De Gruyter, Berlin (2021)
Mainardi, F.: Fractional Calculus and Waves in Linear Viscoelasticity. Imperial College, London (2010)
Rossikhin, Y.A., Shitikova, M.V.: Application of fractional calculus for dynamic problems of solid mechanics: Novel trends and recent results. Applied Mechanics Reviews 63, 010801 (2010)
Torvik, P.J., Bagley, R.L.: On the appearance of the fractional derivative in the behavior of real materials. Journal of Applied Mechanics 51, 725–728 (1984)
Monje, C.A., Chen, Y.Q., Vinagre, B.M., Xue, D., Feliu, V.: Fractional-Order Systems and Controls, Fundamentals and Applications. Springer, London (2010)
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam (2006)
Podlubny, I.: Fractional Differential Equations. Academic Press, San Diego (1999)
Miller, K.S., Ross, B.: An Introduction to the Fractional Calculus and Fractional Differential Equations. Wiley, New York (1993)
Diethelm, K.: The Analysis of Fractional Differential Equations: An Application-Oriented Exposition Using Differential Operators of Caputo Type. Springer, Berlin (2010)
Lubich, C.: Discretized fractional calculus. SIAM Journal on Mathematical Analysis 17(3), 704–719 (1986)
Meerschaert, M.M., Tadjeran, C.: Finite difference approximations for fractional advection-dispersion flow equations. Journal of Computational and Applied Mathematics 172, 65–77 (2004)
Meerschaert, M.M., Tadjeran, C.: Finite difference approximations for two-sided space-fractional partial differential equations. Applied Numerical Mathematics 56, 80–90 (2006)
Meerschaert, M.M., Tadjeran, C.: A second-order accurate numerical method for the two-dimensional fractional diffusion equation. Journal of Computational Physics 220, 813–823 (2007)
Rawashdeh, E.A.: Numerical solution of fractional integro-differential equations by collocation method. Applied Mathematics and Computation 176, 1–6 (2006)
Jafari, H., Daftardar-Gejji, V.: Solving linear and nonlinear fractional diffusion and wave equations by adomian decomposition. Applied Mathematics and Computation 180, 488–497 (2006)
Fan, Q., Wu, G.C., Fu, H.: A note on function space and boundedness of the general fractional integral in continuous time random walk. Journal of Nonlinear Mathematical Physics 29, 95–102 (2022)
Wu, G.C., Baleanu, D., Zeng, S.D., Deng, Z.G.: Discrete fractional diffusion equation. Nonlinear Dynamics 80, 281–286 (2015)
Garrappa, R.: Numerical solution of fractional differential equations: a survey and a software tutorial. Mathematics 6(2), 16 (2018)
Deng, W.H., Hesthaven, J.S.: Local discontinuous galerkin methods for fractional diffusion equations. ESAIM Mathematical Modelling and Numerical Analysis 47, 1845–1864 (2013)
Chen, A., Li, C.P.: Numerical solution of fractional diffusion-wave equation. Numerical Functional Analysis and Optimization 37, 19–39 (2016)
Khader, M.M.: On the numerical solutions for the fractional diffusion equation. Communications in Nonlinear Science and Numerical Simulation 16, 2535–2542 (2011)
Sweilam, N.H., Nagy, A.M., El-Sayed, A.A.: Second kind shifted chebyshev polynomials for solving space fractional order diffusion equation. Chaos, Solitons & Fractals 73, 141–147 (2015)
Sweilam, N.H., Nagy, A.M., El-Sayed, A.A.: On the numerical solution of space fractional order diffusion equation via shifted chebyshev polynomials of the third kind. Journal of King Saud University-Science 28, 41–47 (2016)
Duan, J.S.: The boundary value problems for fractional ordinary differential equations with robin boundary conditions. International Journal of Applied Mathematics & Statistics 57, 200–214 (2018)
Mainardi, F., Gorenflo, R.: On mittag-leffler-type functions in fractional evolution processes. Journal of Computational and Applied Mathematics 118, 283–299 (2000)
Mason, J.C., Handscomb, D.C.: Chebyshev Polynomials. Chapman & Hall/CRC, Londoon (2003)
Acknowledgements
The work was supported by the National Natural Science Foundation of China (No. 11772203).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by NM Bujurke.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Duan, J., Jing, L. The solution of the time-space fractional diffusion equation based on the Chebyshev collocation method. Indian J Pure Appl Math (2023). https://doi.org/10.1007/s13226-023-00495-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s13226-023-00495-y
Keywords
- Fractional calculus
- Fractional diffusion equation
- Chebyshev polynomials
- Mittag-Leffler function
- Collocation method