
Abstract
We study statistical inference of the inverted exponentiated Rayleigh distribution under progressively first-failure censoring samples in our paper. Specifically, we deal with Maximum likelihood and Bayes estimators of parameters. The observed Fisher matrix is conducive to obtain asymptotic confidence interval. Parametric bootstrap methods are applied to provide the confidence intervals. Bayes estimators in terms of squared error loss function are derived with Metropolis–Hastings technique, which are helpful to construct highest posterior density credible intervals. We compare the behavior of various estimators by conducting Monte Carlo simulations. A set of actual data is analyzed to introduce the proposed methods.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The definition of Rayleigh distribution was originally given by Rayleigh who concerned a problem about the area of acoustics, which was a particular form of the Weibull distribution. Its hazard rate function would grow linearly over time. Due to this important property, Rayleigh distribution is indispensable in numerous application fields. Some applications of Rayleigh distribution could be found in construction of physics model fields, for instance, sound radiation, ray radiation, wave heights and wind speed. Considering that Rayleigh distribution could exactly represent Instantaneous state, one would use it to describe instantaneous peak values in communication theory, see Gómez-Déniz and Gómez-Déniz (2013). Polovko (1968) and Dyer and Whisenand (1973) pointed out that Rayleigh distribution played a significant role in Electronic Vacuum Devices and Communication Engineering such as the swing of radio noise and envelopes of certain stochastic processes, which had probability density function of Rayleigh. In addition, the Rayleigh distribution fits very well with the model that grew rapidly over time. So it is very popular in probability and statistics. It is widely used as a useful life model in the field of reliability, while it applies in other sciences, including operations, statistics and biology. In the recent past, the distributions associated with the Rayleigh distribution have attracted the attention of many authors. Raqab and Madi (2009) considered informative and non-informative priors to get estimation and prediction of the exponentiated Rayleigh model. Mahmoud and Ghazal (2016) proposed estimations of exponentiated Rayleigh distribution with type-II censoring model. Also, Kundu and Raqabb (2005) introduced different estimation procedures to estimate the unknown parameter(s) of generalized Rayleigh distribution. Wu (2006) discussed the problem of accepting the sampling scheme when the samples came from the generalized Rayleigh distribution. Apart from that, Ali (2015) derived the Bayesian estimation for inverted Rayleigh distribution. Soliman et al. (2010) obtained estimation and prediction under lower record values for the inverted Rayleigh distribution. In a recent study, Rastogi and Tripathi (2014) showed that the estimation of unknown parameters using type-II progressive censoring, meanwhile the distribution was inverted exponentiated Rayleigh distribution.
We note that the hazard rate of inverted exponentiated Rayleigh distribution is not monotonous. In view of numerous practical situations, it is universal that hazard rate is nonmonotone. Therefore, we are interested in the inverted exponentiated Rayleigh distribution when the observed data is progressive first-failure censored. To the best of our knowledge, there is no research about this case. We consider the estimation of the parameters for the inverted exponentiated Rayleigh distribution by using the progressive first failure censored sample. The failure rate function of the inverted exponentiated Rayleigh distribution is unimodal. With the help of the advantage, the inverted exponentiated Rayleigh distribution is favored by many statisticians. In fact, the lifetime of electrical and mechanical components, the treatment of hospital patients will change with time, and is not only decreasing with the growth of time. Therefore, inverted exponentiated Rayleigh distribution can be used to fit the data, because its failure rate function is not monotonous. When we estimate the parameters of the inverted exponentiated Rayleigh distribution, the progressive first-failure censoring is used to obtain samples. The progressive first-failure censoring sample is the most time saving and cost efficient sampling method in the known censored modes. This method of obtaining samples can help us save experimental costs and carry out experiments at a fast speed.
In consideration of cost and time, many experimenters pay more attention on censoring in life testing of reliability analysis, such as Aslam et al. (2018), Aslam et al. (2019) and Sajid Ali and Butt (2019). More importantly, deletion is reasonable. Aslam et al. (2018), Muhammad (2018), Aslam (2019) and Aslam and Arif (2018) have studied it. The most common censoring schemes have been used widely by many authors with all kinds of lifetime models, which are type-I and type-II censoring, one can refer to Kay (1976), Aslam et al. (2018) and Sinha (1986). However, there is a more popular censoring scheme, progressive censoring that could removal test units at time points not final terminal point by Balakrishnan and Aggarwala (2000), Nasrullah Khan (2018) applied this censoring method. And more, Balasooriya (1995) proposed that experimenter could divide the test items into several groups in order to cut short the time and cost of experiment. However, the more attractive censoring is uniting the characteristics of progressive censoring and grouping censoring into a better censoring, namely, progressive first-failure censoring scheme, Wu and Kus (2009) explained it in detail. Some recent studies, one can refer to Soliman et al. (2011) and Soliman et al. (2012).
The cumulative distribution funcution(cdf) of inverted exponentiated Rayleigh distribution(IERD), denotes by IERD \( (\alpha , \beta ) \), is written as
\(\alpha \) is a shape parameter, the scale parameter as \(\beta \). And corresponding probability density function (pdf) can be given by
Next, we give the IERD’s reliability and failure rate funcutions, respectively,

Plots of f(t) and h(t) of IERD when \( \beta =1 \)
Figure 1 shows the failure rate of inverted exponentiated Rayleigh distribution for \( \alpha =0.5,0.8,1 \) and \( \beta =1 \). It is not hard to find that failure rate of IERD is nonmonotone.
We should firstly define this progressively first-failure censored scheme as below: we assume there are n independent groups in a life experiment, each of which has k units. Once the first failed group is discovered, we will remove the group and \(R_{1} \) groups from the experiment, and the second failed group has taken place while \( R_{2} \) groups and the group are got rid of samples at random, which is discovered the second failure, and so on. The procedure would work m times, then we can get \( x_{1:m:n:k}<x_{2:m:n:k}<\cdots <x_{m:m:n:k} \) with the progressively censoring scheme \( R=( R_{1}, R_{2},\ldots , R_{m}) \) as progressively first-failure censoring order statistics, which comes from a population with pdf \( f(\cdot ) \) and cdf \( F(\cdot ) \). For simplicity, we shall utilize \( x_{i} \) to take place of \( x_{i:m:n:k}\). It is obvious that \( m+R_{1}+ R_{2}+\cdots + R_{m} = n \). The joint pdf with progressively first-failure censoring dataset was derived by Wu and Kus (2009):
\( 0< x_{1}<x_{2}<\cdots<x_{m}<\infty. \)
\( C = n (n- R_{1}-1)(n- R_{1}-R_{2}-1)\cdots (n- R_{1}-R_{2}-\cdots -R_{m-1}-m+1)\). Note that the censored scheme \( R=( R_{1}, R_{2},\ldots , R_{m}) \) could be determined in advance.
Obviously, if \( k=1\) and \(R_{1}=R_{2}=\cdots =R_{m}=0 \), the progressively first-failure censored scheme becomes the complete sample. With group size \( k=1 \), the scheme develops into the progressively type-II censoring. Also, when \( R=(R_{1}=R_{2}=\cdots =R_{m-1}=0) \) and \( R_{m}=n-m \), the progressively first-failure censoring scheme is changed into first failure type-II sample, and it corresponds to first failure censored sample and let \( R=(0,\ldots ,0) \) . And more interesting, this censoring plan can be regarded as traditional type-II censoring plan while \( k=1 \) and \( R=(0,\ldots ,n-m) \). Hence, progressively first-failure censored is a generalization of censoring whose advantages is considering test cost and time.
The structure of article is as below. Section 2 deals with MLEs, which uses the observed Fisher information matrix to obtain parameters’asymptotic confidence intervals (CI) and coverage probabilities (CP). We provide the parametric bootstrap CIs of the parameters with constructing the censoring sample in Sect. 3. Section 4 discusses Bayesian estimators of parameters, and we cover the Bayes estimations using Metropolis–Hastings (M–H) technique to gain highest posterior density (HPD) credible intervals of parameters in the same section. Section 5 adopts a method of simulation study by Monte Carlo. It is applied in order to evaluate the performance of different censored schemes, group number and group sizes. Finally, we illustrate all the methods of this article by a real dataset in the last Section.
2 Maximum likelihood estimation
2.1 Point estimation
\( x_{1}, x_{2}, \ldots , x_{m} \) can be seen as a censoring sample, which is from the inverted exponentiated Rayleigh distribution \((\alpha ,\beta )\) whose censoring scheme is \( \mathbf{R } \). Using Eqs. (1.1), (1.2) and (1.5), the likelihood function can be obtained
We can also write the log-likelihood function as
By taking derivatives from Eq. (2.2) with respect to \(\alpha \) and \(\beta \), then equating to zero in order to get the equations:
From Eq. (2.3) obtain that
Then replacing the Eq. (2.4) with Eq. (2.5)
The \( {\hat{\beta }} \) can be got with the help of Newtown-Raphson iteration method. At the same time, with the invariance character of MLEs, r(t) and h(t) can be derived at a predetermined time t
Here, \( t>0 \).
2.2 Confidence interval estimation
On the base of likelihood equation, this section infers observed Fisher information (OFI). We rename \( \theta =(\alpha ,\beta ) \), we can obtain \( \theta 's \) Fisher information matrix
Here,
We use OFI matrix in our calculations, not the Fisher information matrix, because the expectation of the above expressions are hard to solve. The OFI matrix is obtained as \( I({\hat{\theta }}) \) wtih \({\hat{\theta }} =({\hat{\alpha }},{\hat{\beta }}) \)
Next, the inverted of OFI matrix is the observed variance-covariance matrix of MLEs we need,
The asymptotic distribution of \({\hat{\theta }} \) is a normal distribution as \({\hat{\theta }} \sim N(\theta , I^{-1}({\hat{\theta }})) \) by Lawless (2011) given, which estimation method is MLE. Therefore, bivariate normal distribution as \( 100(1-\varepsilon ) \% \) CI for \( \theta \) is \( {\hat{\theta }}\pm z_{\varepsilon /2}\sqrt{{\hat{Var}}({\hat{\theta }})} \). And the CP can be gained by Monte Carlo simulation as
where the right \( (\varepsilon /2){th} \) percentile of standard normal distribution as \( z_{\varepsilon /2} \), and \(\theta \) could be \(\alpha \) or \( \beta \).
3 Bootstrap estimation for confidence intervals
Obviously, the CIs with asymptotic normal is executed well in view of the large effective sample m. Nevertheless, the sample m in the actual situation is not always large. The bootstrap method would be a wise choice. In this section, we propose two parametric bootstrap algorithms: (I) percentile bootstrap (Boot-p) method utilizes theory of Efron (1982) and (II) percentile bootstrap-t (Boot-t) method in view of Hall (1988). We show the bootstrap procedures below.
3.1 Boot-p method
-
(1)
Step 1: Compute MLEs \( ({\hat{\alpha }},{\hat{\beta }}) \) with the original sample \( x_1,x_2,\ldots ,x_m \), where n, k and \( \mathbf{R } \) are the amount of groups, the size of each group and censored schemes, respectively.
-
(2)
Step 2: Use \( ({\hat{\alpha }},{\hat{\beta }}) \) to create an independent sample, which in order to compute the MLEs \( ({\hat{\alpha }}^{*},{\hat{\beta }}^{*}) \).
-
(3)
Step 3: Repeat N times of Step 2, we can acquire a series of bootstrap estimates \( ({\hat{\alpha }}^{*}_{i},{\hat{\beta }}^{*}_{i}) \), \( i= 1,2,\ldots ,N \).
-
(4)
Step 4: The \( 100(1-2\epsilon ) \% \) Boot-p CI of \( {\hat{\alpha }} \) is provided as
$$\begin{aligned} ({\hat{\alpha }}^{*}_{Boot-p(\epsilon )},~~ {\hat{\alpha }}^{*}_{Boot-p(1-\epsilon )}) \end{aligned}$$after ordering \({\hat{\alpha }}^{*}_{(1)}\le {\hat{\alpha }}^{*}_{(2)}\le ,\ldots ,\le {\hat{\alpha }}^{*}_{(m)}\). As for \(\beta \), we can use the same method to gain the similar result.
3.2 Boot-t method
The initial two steps of Boot-t method are alike as Boot-p method.
-
(3)
Step 3: Do last step N times to compute a series of statistics:
$$\begin{aligned} T_{\alpha i}^{*}=\dfrac{({\hat{\alpha }}^{*})-{\hat{\alpha }}}{\sqrt{I^{-1}({\hat{\alpha }}^{*})}} \end{aligned}$$\( i=1,2,\ldots ,N \).
-
(4)
Step 4: The circa \( 100(1-2\epsilon ) \% \) Boot-t CI of \( {\hat{\alpha }} \) is given by
$$\begin{aligned}&({\hat{\alpha }}-T^{*}_{\alpha Boot-t(\epsilon )}\sqrt{I^{-1}({\hat{\alpha }}^{*})}, \quad {\hat{\alpha }}+\,T^{*}_{\alpha Boot-t(1-\epsilon )}\sqrt{I^{-1}({\hat{\alpha }}^{*})}) \end{aligned}$$after ordering \(T^{*}_{(\alpha 1)}\le T^{*}_{(\alpha 2)}\le ,\ldots ,\le T^{*}_{(\alpha m)}. \)
Similarly, the same approach is used to \(\beta \) would achieve the confidence interval of \( \beta \).
4 Bayesian estimation
Although the traditional methods of estimation are always effective, it is possible to appear hard in mathematical. In the other hand, the simulation method would acquire more attention, for example, Markov Chain Monte Carlo (MCMC). And mroe, the simulation can get point estimation, at the same time, provide the interval estimation. For parameter estimation we have considered squared error loss function. We suppose that gamma priors for both \( \alpha , \beta \):
here a, b, c, d reflect prior knowledge about parameters. The model shall more flexible because of hyper-parameters, and when the super-parameters are zero, which is the non-informative prior. In addition, the prior distribution of gamma distribution is very reasonable, many authors have applied this prior, see Gupta and Singh (2013) and Almutairi et al. (2015). The posterior distribution of parameters can be given with combining the likelihood function and the prior distributions
the joint posterior can be written as
Because we don’t have enough prior information, so consider \( a=b=c=d=0 \). Next, we should give the marginal posterior distributions of parameters \( \alpha ,\beta \), respectively:
We can find that \( h_{\alpha }(\alpha ,\beta |data) \) is a gamma density whose parameters are \( (m+a, b-\sum _{i=1}^{m}k(R_{i}+1)\ln (1-e^{-\beta _{i}/x_{i}^{2}}))\), it’s not difficult to use any gamma generating algorithm to obtain samples of \( \alpha \). However, the samples of \( \beta \) are not directly to get by standard approaches. For this reason, we consider to apply Metropolis–Hastings algorithm.
4.1 Point estimation of Metropolis–Hastings algorithm
There are many methods to solve Bayesian estimation, for example, Lindley’s method, importance sampling procedure and Metropolis–Hastings algorithm (M–H). However, M–H is more attractive than other two methods, because: (I) the numerical procedures and computational are relative straightforward, (II) it provides point estimations, also gives HPD intervals for parameters, and (III) it allows a full analysis of the data. M–H approach is more flexible, simple and effective. For applications of the algorithm, one can refer to Dey and Pradhan (2014).
M–H approach is developed by Metropolis et al. (1952) and later extended by Hastings (1970), and now it is a more popular MCMC method. The M–H algorithm works as below:
-
(1)
Step 1: give an initial surmise of \( \beta ^{0} \) and make t=1.
-
(2)
Step 2: Crate \( \alpha ^{t} \) by using Gamma \( (m+a, b-\sum _{i=1}^{m}k(R_{i}+1)\ln (1-e^{-\beta _{i}/x_{i}^{2}}))\).
-
(3)
Step 3: Crate \( \beta ^{*} \) from \( h_{\beta }(\alpha ,\beta |data) \) with the proposal distribution \( N(\beta ^{t-1},\sigma ^{2}) \), where \( \sigma ^{2} \) is the variance of \( \beta \).
-
(4)
Step 4: Calculate \( \rho (\beta ^{*}|\beta ^{t-1})= \min \{\dfrac{f(\beta ^{*}|x)q(\beta ^{t-1}|\beta ^{*})}{f(\beta ^{t-1}|x)q(\beta ^{*}|\beta ^{t-1})},1\}. \)
-
(5)
Step 5: Take \(\upsilon \) from Uniform(0,1).
-
(6)
Step 6: If \( \upsilon \le \rho (\beta ^{*}|\beta ^{t-1}) \) then \( \beta ^{t}=\beta ^{*} \), otherwise \( \beta ^{t}=\beta ^{t-1} \).
-
(7)
Step 7: let \(t=t+1.\)
-
(8)
Step 8: Repeat Step 2–7 N times.
We discard M initial samples in order to get an independent sample. Thus, the approximate Bayes estimation of \( \theta =(\alpha , \beta ) \) is obtained as
4.2 Highest posterior density credible interval
The point estimation does not take the sampling error into consideration. It is difficult to make a judgement by simply relying on one value in the case of the inevitable occurrence of the sampling error. The advantage of interval estimation will be highlighted at this case. Interval estimation takes into account the sampling error on the basis of point estimation, and ensures that the error does not exceed a given range with a certain probability. So interval estimation provides more reliable information.
With the help of the Bayesian point estimation in the last section, we will build the HPD credible interval for parameter \( \theta \) based on the previously used MCMC method. In the last section, we have got \( N-M \) values of \( \theta \). By sorting the \( \theta _{N+1},\theta _{N+2},\ldots ,\theta _{M} \), a series of ordered values \(\theta _{(N+1)}<\theta _{(N+2)}<,\ldots ,<\theta _{(M)} \) can be obtained. Therefore, we can construct a HPD credible interval for \( \theta \). The strict theory of this method proof, one can see Chen and Shao (1999). Soliman et al. (2010), Soliman et al. (2012) and Dube et al. (2016) also apply this method to construct the HPD credible intervals of parameters. In the case of setting the set letter level \( \delta \), the \( 100(1-2\delta )\% \) HPD credible interval of \( \theta \) as follows:
where \( \theta _{[\delta (N-M)]} \) is the number \( [\delta *(N-M)] \) value of \(\theta _{(N+1)}<\theta _{(N+2)}<,\ldots ,<\theta _{(M)} \), and \( [\delta *(N-M)] \) is the integral part of \( \delta *(N-M) \).
5 Simulation study
We conduct the simulation study to compare the behavior of the different estimates for diverse censored schemes with various group sizes and number of groups, and different priors with different criterions in this section. We assess the performance of MLEs and Bayes estimations in view of bias and mean squares errors (MSE). In addition, we analyse some interval estimates of asymptotic CIs, bootstrap CIs and HPD credible intervals in respect of the average confidence lengths (AL), and CP. When computing the Bayes estimator, we suppose the two priors:
-
(1)
Prior 1: \( a=b=c=d=0 \),
-
(2)
Prior 2: \( a=b=c=d=1 \).
It is clear that prior 2 carries more information, comparing with prior 1. Six censoring schemes (CS) and four combinations of (k, n, m) are considered, they are list next.
-
(1)
six CS: (25, 0 * 24), (1 * 25), (0 * 24, 25), (20, 0 * 29), ((2, 0, 0) * 10), (0 * 29, 20),
-
(2)
four (k, n, m) : (2, 50, 25), (2, 50, 30), (3, 50, 25), (3, 50, 20).
where (1 * 25) means that (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1).
Tables 1 and 2 report the results above average absolute bias and MSE with MLEs and Bayes estimate of \( \alpha ,~\beta \) when \(\alpha =0.5 ,~ \beta =1\). From Tables 1 and 2, we have the following conclusions:
-
(1)
with the increasing of group size k, the MSE would not decrease, however, bias and MSE will decrease with effective m increasing;
-
(2)
Bayesian estimators based on informative prior perform better than non-informative prior;
-
(3)
Bayes estimate is better than MLEs in terms of MSE.
The estimated values \( \hat{r(t)} \) and \( \hat{h(t)} \) are presented in Tables 3 and 4.
One can note that
-
(1)
all the cases show underestimating of \( \hat{r(t)} \) and vice versa for \( \hat{h(t)} \);
-
(2)
as group size k increasing and sample size m is decreasing, the estimates of both MLEs and Bayes are increasing according as bias and MSE;
-
(3)
Bayes estimates obtained with informative prior is outperform.
The AL and CP of the parameter \( \alpha ,~\beta \) in Tables 5 and 6. And, we can see that
-
(1)
the AL of asymptotic CIs, bootstrap CIs and HPD credible intervals would become narrow as effective sample size m and group size k increasing;
-
(2)
Bayes estimates work better than MLEs with a view to AL and CP, especially the information priori Bayesian performance very great;
-
(3)
bootstrap CIs are worse than other CIs in accordance with AL and CP at the case of not large effective sample.
6 Real data
We seek out a real dataset, which helps us to illustrate the estimations of our paper. At first, we will analyze the strength data set, which is initially used by Badar and Priest (1982). The data of numerical example gave the strength meterage in GPA of single carbon fibers, and impregnates 1000-carbon fiber tows, which was tested under tension at gauge lengths of 10mm. The dataset is given in Table 7.
This data was analyzed previously by Kundu and Gupta (2006) and Kundu and Gupta (2005).
Before progressing further, we verify the inverted exponentiated Rayleigh distribution to the data, which is removed the first data and is subtracted 0.75 from the data in order to group the dataset, and compare its fitting with inverted exponentiated exponential (IEER) and inverted exponentiated Pareto distributions (IEPD). The pdfs of them as follows:
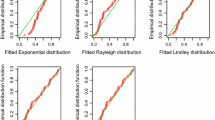
We present different criterions to evaluate the optimum degree for fitting these distributions, which applying MLE to compute subtractive log-likelihood function(\(-\ln L \)), Akaike information criterion (\( \textit{AIC} \)), Bayesian information criterion(\(\textit{BIC}\)) and Kolmogorov−Smirnov (K–S) statistic, we just to know \( \textit{p} \) values of K–S. Here, the maximum value for likelihood function of an estimated model is named L. And \( \textit{AIC} \) is defined that \( \textit{AIC}=2\times (\textit{p}-\ln (\textit{L})) \), and the amount of distribution’s parameters as \(\textit{p}\). We also give definition of \(\textit{BIC} \) : \( \textit{BIC}=\textit{p}\times \ln (n)-2\times \ln (\textit{L}) \), and the sum of observations in sample as n. Thus the minimum \( -\ln L,\textit{AIC},\textit{BIC} \) and highest \( \textit{p} \) values of K–S statistics values would be the criterions for best distribution. Apart from that, we propose a graphic method for the optimum degree of fitting different distributions at Fig. 2.

quantile-quantile plots of three distributions with actual example
Table 8 lists that \( -\ln L,~\textit{AIC},~\textit{BIC} \) and \( \textit{p} \) values.
Next, we divide the dataset into \( n=31 \) groups, which has \( k=2 \) units in each group, to generate first-failure censored sample. Then, we consider three progressive censoring schemes with the last sample. Table 9 presentes the censoring schemes and corresponding samples.
We estimate the two parameters and reliability characteristics with MLEs and Bayes estimators in Table 10.
And, we compute r(t) and h(t) corresponding to real data by using \( t=4 \). This section considers Bayes estimation with non-informative prior, due to that we don’t have prior information about the parameters. Table 11 lists the \( 95\% \) asymptotic, Boot-p, Boot-t CIs and HPD credible intervals for parameters.
7 Conclusion
Censoring is an ordinary technique to acquire sample from various experiments. Progressively first-failure censored is an extension of censoring, which helps to reduce time and cost. And, the hazard rate of IERD is nonmonotone. It is common that nonmonotone of hazard rate in many practical situations. We study the estimation of parameters of IERD under progressively first-failure censored in our paper. We propose MLE and corresponding asymptotic CI estimate of the parameters with IERD. We then compute confidence intervals with bootstrap method. The Bayesian estimates and the associated HPD interval estimates under square error loss function are developed. It is hard to obtain explicit forms of Bayes estimators, however, we make use of M–H algorithm for Bayes estimation. A simulation is used to evaluate the various estimators’work. And the theoretical results have been applied with real data. Moreover, the methodology is discussed in our article could be helpful to data analyst and reliability practitioners.
References
Ali S (2015) Mixture of the inverse rayleigh distribution: properties and estimation in a bayesian framework. Appl Math Model 39(2):515–530
Ali S, Raza SM, Aslam M, Butt MM (2019) Cev-hybrid dewma charts for censored data using weibull distribution. Commun Stat Simul Comput 2:1–16
Almutairi DK, Ghitany ME, Kundu D (2015) Inferences on stress-strength reliability from weighted lindley distributions. Commun Stat Theory Methods 42(8):1443–1463
Aslam M (2019) A new failure-censored reliability test using neutrosophic statistical interval method. Int J Fuzzy Syst 14:1–7
Aslam M, Arif O (2018) Testing of grouped product for the weibull distribution using neutrosophic statistics. Symmetry 10:1–10
Aslam M, Khan N, Hussein Al-Marshadi A (2018) Design of chart for a birnbaum saunders distribution under accelerated hybrid censoring. J Stat Manag Syst 21:1419–1432
Aslam M, Balamurali S, Periyasamypandian J, Khan N (2019) Designing of an attribute control chart based on modified multiple dependent state sampling using accelerated life test under weibull distribution. Commun Stat Simul Comput 7:1–15
Badar M, Priest A (1982) Statistical aspects of fiber and bundle strength in hybrid composites. Prog Sci Eng Compos 4:1129–1136
Balakrishnan N, Aggarwala R (2000) Progressive censoring. Birkhauser, Basel
Balasooriya U (1995) Failure censored reliability sampling plans for the exponential distribution. J Stat Comput Simul 52(52):337–349
Chen MH, Shao QM (1999) Monte carlo estimation of bayesian credible and HPD intervals. J Comput Graph Stat 8(1):69–92
Dey S, Pradhan B (2014) Generalized inverted exponential distribution under hybrid censoring. Stat Methodol 18:101–114
Dube M, Krishna H, Garg R (2016) Generalized inverted exponential distribution under progressive first-failure censoring. J Stat Comput Simul 86(6):1095–1114
Dyer DD, Whisenand CW (1973) Best linear unbiased estimator of the parameter of the Rayleigh distribution-part i: Small sample theory for censored order statistics. IEEE Trans Reliab R–22(1):27–34
Efron B (1982) The jackknife, the bootstrap and other resampling plans. Society for Industrial and Applied Mathematics, Philadelphia
Gupta PK, Singh B (2013) Parameter estimation of lindley distribution with hybrid censored data. Int J Syst Assur Eng Manag 4(4):378–385
Gómez-Déniz E, Gómez-Déniz L (2013) A generalisation of the Rayleigh distribution with applications in wireless fading channels. Wirel Commun Mobile Comput 13(1):85–94
Hall P (1988) Theoretical comparison of bootstrap confidence intervals. Ann Stat 16(3):927–953
Hastings WK (1970) Monte carlo sampling methods using markov chains and their applications. Biometrika 57(1):97–109
Kay E (1976) Methods for statistical analysis of reliability and life data. J Oper Res Soc 27(2):401–403
Khan N, Muhammad Aslam SMMRCJ (2018) A new variable control chart under failure-censored reliability tests for weibull distribution. Qual Reliab Eng Int 35:572–581
Kundu D, Gupta RD (2005) Estimation of \(p[y < x ]\) for generalized exponential distribution. Metrika 61(3):291–308
Kundu D, Gupta RD (2006) Estimation of \(p[y<x]\) for weibull distributions. IEEE Trans Reliab 55(2):270–280
Kundu D, Raqabb MZ (2005) Generalized Rayleigh distribution: different methods of estimations. Comput Stat Data Anal 49(1):187–200
Lawless JF (2011) Statistical models and methods for lifetime data, 2nd edn. Wiley, London
Mahmoud MAW, Ghazal MGM (2016) Estimations from the exponentiated Rayleigh distribution based on generalized type-ii hybrid censored data. J Egypt Math Soc 25:71
Metropolis N, Rosenbluth AW, Rosenbluth MN, Teller AH, Teller E (1952) Equation of state calculations by fast computing machines. J Biochem Biophys Methods 21(6):1087–1092
Muhammad A (2018) Design of sampling plan for exponential distribution under neutrosophic statistical interval method. IEEE Access 6:64153–64158
Polovko AM (1968) Fundamentals of reliability theory. Academic Press, New York
Raqab MZ, Madi MT (2009) Bayesian analysis for the exponentiated Rayleigh distribution. Metron LXVII(3):269–288
Rastogi MK, Tripathi YM (2014) Estimation for an inverted exponentiated Rayleigh distribution under type ii progressive censoring. J Appl Stat 41(11):2375–2405
Sinha SK (1986) Reliability and life testing. Wiley, London
Soliman A, Amin EA, Abd-El Aziz AA (2010) Estimation and prediction from inverse Rayleigh distribution based on lower record values. Sensors 20:882–885
Soliman AA, Ellah AHA, Abouelheggag NA, Modhesh AA (2011) Bayesian inference and prediction of burr type xii distribution for progressive first failure censored sampling. Intel Inf Manag 03(5):175–185
Soliman AA, Abd-Ellah AH, Abou-Elheggag NA, Abd-Elmougod GA (2012) Estimation of the parameters of life for gompertz distribution using progressive first-failure censored data. Comput Stat Data Anal 56(8):2471–2485
Wu SJ (2006) Acceptance sampling based on truncated life tests for generalized Rayleigh distribution. J Appl Stat 33(6):595–600
Wu SJ, Kuş C (2009) On estimation based on progressive first-failure-censored sampling. Comput Stat Data Anal 53(10):3659–3670
Acknowledgements
Funding was provided by the program for the Fundamental Research Funds for the Central Universities (Grant No. 2014RC042).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Gao, S., Gui, W. Parameter estimation of the inverted exponentiated Rayleigh distribution based on progressively first-failure censored samples. Int J Syst Assur Eng Manag 10, 925–936 (2019). https://doi.org/10.1007/s13198-019-00822-9
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13198-019-00822-9