
Abstract
In planar piecewise differential systems it is known that when the discontinuity curve is a straight line and both differential systems are linear centers, these piecewise differential systems have no limit cycles but if they are separated by other types of discontinuity curves, such as parabolas, then they have limit cycles. All these results are in the plane and although the qualitative theory of planar piecewise differential systems has been the subject of many research, this is not the case for piecewise differential systems in higher dimensions. In this paper, we study the maximum number of limit cycles of discontinuous piecewise differential systems in \(\mathbb {R}^3\) separated by a paraboloid (elliptic or hyperbolic), and formed by what we call two linear differential centers. We prove that these systems can have at most one limit cycle and that this upper bound is reached. We also provide systems of these types without periodic solutions and with a continuum of periodic solutions.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction and Statement of the Main Result
The study of piecewise linear differential systems goes back to Andronov et al. [1] and still continues to receive attention from researchers. These last years a renewed interest has appeared in the mathematical community for understanding the dynamical richness of these piecewise linear differential systems because they are widely used to model processes appearing in electronics, mechanics, economy, etc., see for instance the books of di Bernardo et al. [5], Simpson [18], the survey of Makarenkov and Lamb [14] and the hundreds of references quoted in these works.
In the qualitative theory of dynamical systems the existence of periodic orbits and more precisely of limit cycles is very important because when they exist, they enable us to understand the dynamical behavior of differential systems. Moreover many real world phenomena are related to their existence, see for instance the Van der Pol oscillator [19, 20], among many others. In order to understand the dynamical behavior of the discontinuous piecewise differential systems it is also important to know if they have crossing periodic orbits and crossing limit cycles. In discontinuous piecewise differential systems a crossing periodic orbit is a periodic orbit that intersects the discontinuity manifold in a finite number of crossing points and a crossing limit cycle is a crossing periodic orbit that is isolated in the set of all periodic orbits of the system.
In the last years, the study of the existence and maximum number of limit cycles of planar piecewise differential systems has been a subject of intense research. Most of the studies developed in this direction were done considering piecewise linear differential systems with only two zones and separated by a straight line and only a few of them were done taking into account more zones or considering discontinuity curves with different shapes than a straight line.
In the case of planar piecewise differential systems separated by a straight line, the following interesting question emerged: discontinuous piecewise linear differential systems with only centers can create limit cycles? In 2018 Llibre and Teixeira answered this question by proving that these piecewise differential systems have no limit cycles, see [11].
In this regard, recently in [2, 4, 7, 8, 13] some authors studied the existence and the maximum number of limit cycles for discontinuous piecewise differential systems formed by differential centers that have either two or more zones, and they are separated either straight line or conics (reducible or irreducible) and they proved that these systems have limit cycles. In particular, in [13] the authors proved that discontinuous piecewise differential systems separated by a parabola and formed by two linear differential centers have at most 3 limit cycles and that this upper bound is reached. From these works, it is apparent that the shape of the discontinuity curve plays an important role in the number of limit cycles that a discontinuous piecewise differential system can have.
In this way, a natural question arises, namely, to consider discontinuous piecewise differential systems in \(\mathbb {R}^3\), since although the qualitative theory of planar piecewise differential systems has been a subject of many research this is not the case for piecewise differential systems in higher dimensions. Most of the existing results are related to very specific families of systems (see for instance [12], where the authors characterized the families of periodic orbits of two discontinuous piecewise differential systems in \(\mathbb {R}^3\) where the discontinuity surface is a plane).
Our objective is to study the existence and the maximum number of crossing limit cycles for discontinuous piecewise differential systems in \(\mathbb {R}^3\) formed by two linear differential systems which we will call linear centers in \(\mathbb {R}^3\) and separated by a paraboloid ( elliptic or hyperbolic). Without loss of generality, we can consider that an elliptic paraboloid is of the form
And a hyperbolic paraboloid is of the form
We observe that indeed \(P_E\) and \(P_H\) divide the space \(\mathbb {R}^3\) in two regions, namely
and
respectively.
We recall that a center of a differential system in the plane \(\mathbb {R}^2\) is an equilibrium point p having a neighborhood U such that \(U\setminus \{p\}\) is filled of periodic orbits. A global center is a center p such that \(\mathbb {R}^2{\setminus } \{p\}\) is filled with periodic orbits. The notion of a center appeared already in the works of Poincaré [15,16,17] in 1881 and Dulac [6] in 1908.
In \(\mathbb {R}^3\) there are no centers in the sense that there are no equilibrium points p having a neighborhood U such that \(U\setminus \{p\}\) is filled of periodic orbits, see for instance [3]. In the following, we introduce the notion of the linear center in \(\mathbb {R}^3\) that we shall use.
One of the differential systems in \(\mathbb {R}^3\) with more periodic orbits is
This differential system has two linearly independent first integrals, namely
Moreover system (1) has a global center at the equilibrium point \((0, 0, z_0)\) of each plane \(z = z_0\). So all its orbits are periodic except the points of the z- axis which are equilibrium points. We denote this differential system as a linear center in \(\mathbb {R}^3\).
The aim of this paper is to study the maximum number of crossing limit cycles that the discontinuous piecewise differential systems formed by two linear centers (after applying an affine change of variables) and separated by the paraboloid either \(P_E\) or \(P_H\) can have. Moreover, we also want to show that this maximum is reached.
Our main result is as follows.
Theorem 1
Consider discontinuous piecewise linear differential systems in \(\mathbb {R}^3\) formed by two linear centers (after applying an affine change of variables) and separated by a paraboloid ( elliptic or hyperbolic). The following statements hold:
- (i):
-
The maximum number of limit cycles in both cases is one.
- (ii):
-
In both cases there are systems without crossing periodic orbits.
- (iii):
-
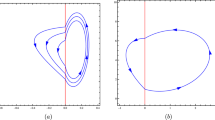
In both cases there are systems with a continuum of crossing periodic orbits. See Fig. 1 for the case of the elliptic paraboloid and Fig. 2 for the case of the hyperbolic paraboloid.
- (iv):
-
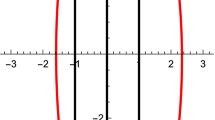
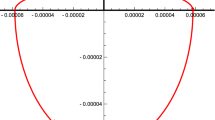
In both cases there are systems with one crossing limit cycle. See Fig. 3 for the case of the elliptic paraboloid and Fig. 4 for the case of the hyperbolic paraboloid.
Theorem 1 is proved in Sect. 3.



One crossing limit cycle intersecting \(P_E\)

One crossing limit cycle intersecting \(P_H\)
Preliminaries
The linear differential systems considered in each piece \(\mathcal {R}_E^1, \mathcal {R}_E^2, \mathcal {R}_H^1\) and \(\mathcal {R}_H^2\) are linear differential centers (1) after applying a general affine transformation. More precisely, we shall use the next result.
Lemma 1
Doing a rescaling of the independent variable after the affine change of variables given by
where \(a_i, b_i, c_i \in {\mathbb {R}}\) for \(i=1,2,3,4\) and
system (1) becomes
Moreover, two linearly independent first integrals of the differential system (2) are
In general, studying crossing periodic orbits of discontinuous piecewise differential systems is a very difficult problem. And a useful tool that allows studying these periodic orbits is to verify if the differential systems that compose the piecewise differential system are completely integrable. We recall that a differential system in \(\mathbb {R}^3\) is completely integrable if it has two first integrals linearly independent because then we can describe an orbit that passes through a given point p as the intersection of all level surfaces to which the point p belongs. It is known that linear differential systems are always completely integrable.
Therefore in order to study crossing periodic orbits of a piecewise differential system in \(\mathbb {R}^3\) formed by two linear differential systems, which intersect the discontinuity surface in the points \(p_0\) and \(p_1\), these points must belong to the intersection of the same level surfaces to both differential systems, this is, they must satisfy the following closing equations
where \(F_{i}(x_1, x_2, x_3)\) and \(G_i(x_1, x_2, x_3)\) for \(i=1,2\), are the linearly independent first integrals of the systems that compose the discontinuous piecewise differential system. This tool has been used in the papers [9, 10]. We use the same technique in the proof of Theorem 1.
Proof of Theorem 1
Proof of statement (i)
We have two cases, first when the discontinuity surface is an elliptic paraboloid \((P_E)\) and second when the discontinuity surface is a hyperbolic paraboloid \((P_H)\). Here we only provide all the details of the proof of statement (i) considering that the discontinuity surface is \(P_E\), because the proof considering the paraboloid \(P_H\) is completely analogous.
By Lemma 1, we consider the discontinuous piecewise differential systems such that in the region \(\mathcal {R}_E^1\) is considered the linear differential center (2), which has the two linearly independent first integrals (3) and in the region \(\mathcal {R}_E^2\) we consider the linear differential center
Where \(\alpha _i, \beta _i, \gamma _i \in {\mathbb {R}}\) for \(i=1,2,3,4\) and
This system has the two linearly independent first integrals
In order to have a crossing periodic orbit that intersects the discontinuity surface \(P_E\) in two points \(p_0=(X_0, Y_0, Z_0)\) and \(p_1=(X_1, Y_1, Z_1)\), using (4) we obtain that these points must satisfy the following equivalent system
We study two cases: \(c_3\gamma _3\ne 0\) and \(c_3\gamma _3=0\).
Case 1: \(c_3\gamma _3\ne 0\). Setting \(E_1=\gamma _3e_2-c_3e_4\), we obtain
We have two subcases: \(c_3 \gamma _1 - c_1 \gamma _3 =0\), or \(c_3 \gamma _1 - c_1 \gamma _3 \ne 0\).
Subcase 1.1: \(c_3 \gamma _1 - c_1 \gamma _3 =0\).
We have \(E_1=(c_3\gamma _2-c_2\gamma _3)(Y_0-Y_1)=0\). We have two subcases: \(c_3\gamma _2-c_2\gamma _3\ne 0\), or \(c_3\gamma _2-c_2\gamma _3=0\).
Subcase 1.1.1: \(c_3\gamma _2-c_2\gamma _3\ne 0\). From \(E_1\) we obtain that
Then equations \(e_1\), \(e_3\) and \(e_4\) in system (6) reduce to
We observe that we can consider \(X_0\ne X_1\), because if \(X_0= X_1\) from (8), we would have that \(p_0=p_1\), and consequently we would not have limit cycles. From equation \(e_4\) we get
Now we introduce \(X_1\) into \(e_1\) and \(e_3\) and we obtain
Analyzing equation \(e_1\) we have two subcases: \(\gamma _1(- a_3^2 \gamma _1 - b_3^2 \gamma _1 + a_1 a_3 \gamma _3 + b_1 b_3 \gamma _3)\ne 0\), or \(\gamma _1(- a_3^2 \gamma _1 - b_3^2 \gamma _1 + a_1 a_3 \gamma _3 + b_1 b_3 \gamma _3)= 0\).
Subcase 1.1.1.1: \(\gamma _1(- a_3^2 \gamma _1 - b_3^2 \gamma _1 + a_1 a_3 \gamma _3 + b_1 b_3 \gamma _3)\ne 0.\) From equation \(e_1\) we can isolate the variable \(X_0\) and we get
We observe that
Consider \(X_0^{-}\). From (9) we have \(X_1^-=(-\gamma _1-X_0^- \gamma _3)/\gamma _3\) and from equation \(e_3\) in (10), we obtain
Using this and also (8), we have that
is a solution of system (6).
Now if we consider \(X_0^+\), by (9) we have \(X_1^+=(-\gamma _1-X_0^+\gamma _3)/\gamma _3\) and by equation \(e_3\) we get \(Y_0^+\), which satisfies that
Moreover by (9) and (11) we have that
From the above conditions and by (8), the second solution is given by
That is, the second solution provides the same periodic orbit than the solution (12). Therefore in this case we have proved that it is possible to have at most one limit cycle intersecting the paraboloid \(P_E\) in two different points \(p_0\) and \(p_1\).
Subcase 1.1.1.2: \(\gamma _1 (- a_3^2 \gamma _1 - b_3^2 \gamma _1 + a_1 a_3 \gamma _3 + b_1 b_3 \gamma _3)= 0.\) We have three subcases: \(\gamma _1=0\) and \(-2 a_3^2 \gamma _1 - 2 b_3^2 \gamma _1 + 2 a_1 a_3 \gamma _3 + 2 b_1 b_3 \gamma _3\ne 0\), or \(\gamma _1\ne 0\) and \(-2 a_3^2 \gamma _1 - 2 b_3^2 \gamma _1 + 2 a_1 a_3 \gamma _3 + 2 b_1 b_3 \gamma _3= 0\), or \(\gamma _1=0\) and \(-2 a_3^2 \gamma _1 - 2 b_3^2 \gamma _1 + 2 a_1 a_3 \gamma _3 + 2 b_1 b_3 \gamma _3= 0\).
Subcase 1.1.1.2.1: \(\gamma _1=0\) and \(- a_3^2 \gamma _1 - b_3^2 \gamma _1 + a_1 a_3 \gamma _3 + b_1 b_3 \gamma _3\ne 0\). When \(\gamma _1=0\), from \(e_1\) in (10) we obtain
If we consider \(X_0^-\), from (9) and \(e_3\) we obtain \(X_1^-\) and \(Y_0^-\), respectively. Similarly to Subcase 1.1.1.1, if we consider \(X_0^+\) we get \(X_1^+\) and \(Y_0^+\). But then we have that
So we only have one solution of system (6) and therefore at most one limit cycle.
Subcase 1.1.1.2.2: \(\gamma _1\ne 0\) and \(- a_3^2 \gamma _1 - b_3^2 \gamma _1 + a_1 a_3 \gamma _3 + b_1 b_3 \gamma _3= 0\). If \(a_3^2+b_3^2\ne 0\), from \(- a_3^2 \gamma _1 - b_3^2 \gamma _1 + a_1 a_3 \gamma _3 + b_1 b_3 \gamma _3= 0\) we get
Substituting into equation \(e_1\), we get
If \(a_1 b_3 - a_3 b_1=0\) we have that \(e_1\equiv 0\) and equation \(e_3=0\) has two unknowns \(X_0\) and \(Y_0\). Then if there are solutions for this equation, we would have a continuum of solutions that would generate a continuum of crossing periodic solutions, and so we would not have limit cycles.
If \(a_1 b_3 - a_3 b_1\ne 0\) and \(a_3 b_2 - a_2 b_3=0\) then equation \(e_1=0\) only provides conditions for the parameters \(a_i, b_i\) for \(i=1,3,4\), and moreover to solve system (6) it is equivalent to solve equation \(e_3=0\) which has two unknowns \(X_0\) and \(Y_0\). As before, we cannot have limit cycles.
If \(a_1 b_3 - a_3 b_1\ne 0\) and \(a_3b_2-a_2b_3\ne 0\), then we have
Substituting \(Y_0\) into equation \(e_3\) we obtain \(X_0^{\pm }\). Similarly to the above case, if we consider \(X_0^-\), using (9) we obtain \(X_1^-\) and then we have the solution \((X_0^-,Y_0,Z_0^-,X_1^-,Y_0,Z_1^-)\). Considering \(X_0^+\) we get \(X_1^+\), but we have that
Then the second solution provides the same periodic orbit as the first one. Therefore in this case we only have one solution for system (6), and hence at most one limit cycle intersecting the paraboloid \(P_E\) in two points.
If \(a_3^2+b_3^2= 0\), equation \(e_1\) in (10) becomes
If \(a_1 a_2 + b_1 b_2=0\), equation \(e_1=0\) provides conditions for the parameters \(a_1, a_4, b_1, b_4\), \(\gamma _1, \gamma _3\), and similarly to the above case, equation \(e_3=0\) has two unknowns \(X_0\) and \(Y_0\) and as before, we cannot have limit cycles.
Considering that \(a_1a_2+b_1b_2\ne 0\), from \(e_1\) we get
Substituting it in equation \(e_3\) we obtain \(X_0^{\pm }\), and similarly to the above cases, the two possible solutions generate the same periodic orbit, and so we have at most one limit cycle.
Subcase 1.1.1.2.3: \(\gamma _1=0\) and \(- a_3^2 \gamma _1 - b_3^2 \gamma _1 + a_1 a_3 \gamma _3 + b_1 b_3 \gamma _3= 0.\) This condition is equivalent to \(\gamma _1=0\) and
From (13) we obtain that when \(a_3 \ne 0\) then \(a_1=-b_1b_3/a_3\). In this case equation \(e_1\) becomes
If \(b_1=0\) then \(e_1\equiv 0\) and as in the above case, equation \(e_3=0\) has two unknowns \(X_0\) and \(Y_0\), and if there are solutions for this equation, we would have a continuum of crossing periodic orbits and so we do not have limit cycles.
If \(b_1\ne 0\) and \(a_3b_2-a_3b_3=0\), equation \(e_1=0\) provides conditions for the parameters \(a_3, a_4, b_3\) and \(b_4\), and again \(e_3=0\) has two unknowns \(X_0\) and \(Y_0\), and so we cannot have limit cycles.
If \(b_1\ne 0\) and \(a_3b_2-a_3b_3\ne 0\) then from equation \(e_1\), we get \(Y_0=(a_4b_3-a_3b_4)/(a_3b_2-a_2b_3)\). In this case, substituting it in equation \(e_3\) we obtain \(X_0^{\pm }\), and as in the above cases the two possible solutions generate only one periodic orbit and then we have at most one limit cycle.
When \(a_3=0\), from the condition (13) we obtain three possibilities, namely either \(b_1=0\) and \(b_3\ne 0\), or \(b_1\ne 0\) and \(b_3=0\), or \(b_1=0=b_3\). In all cases, we obtain the expression for \(Y_0\) by equation \(e_1\) in (10) and substituting it in equation \(e_3\) we obtain \(X_0^{\pm }\). These points satisfy \(X_0^+=X_1^-\) and \(X_0^-=X_1^+\), that is, the two possible solutions \((X_0^{\pm },Y_{0},Z_0^{\pm },X_1^{\pm },Y_0,Z_1^{\pm })\) generate the same periodic orbit. Therefore we can have at most one crossing limit cycle.
Subcase 1.1.2: \(c_3 \gamma _2 - c_2 \gamma _3 = 0\). In this case, we have that equations \(e_2\) and \(e_4\) in (6) satisfy,
this is, system (6) reduces to system which has three polynomial equations and four unknowns \(X_0, X_1, Y_0, Y_1\), if there are solutions for this system, then it would have a continuum of solutions that produce a continuum of crossing periodic solutions, then we cannot have crossing limit cycles.
Subcase 1.2: \(c_3 \gamma _1 - c_1 \gamma _3 \ne 0\). From (7) we get
Substituting this expression of \(X_0\) into system (6), we obtain that equations \(e_1, e_3 \ \text{ and }\ e_4,\) have as common factor \(Y_1-Y_0\), and we observed that this factor can be eliminated because if \(Y_1 = Y_0\), by (14) we would have that \(p_0=p_1\), and consequently we would not have limit cycles.
The expression for equation \(e_4\) is
Then we have two subcases, either \(c_3 \gamma _2 - c_2 \gamma _3=0\), or \(c_3 \gamma _2 - c_2 \gamma _3\ne 0.\)
Subcase 1.2.1: \(c_3 \gamma _2 - c_2 \gamma _3 = 0\). We obtain that \(c_2=c_3\gamma _2/\gamma _3.\) Moreover by (14), we get that
And from (15) we obtain
Substituting these expressions into equations \(e_1\) and \(e_3\), we have
By equation \(e_1\) we can have two subcases: \((a_3^2 + b_3^2) \gamma _2 - (a_2 a_3+ b_2 b_3) \gamma _3=0\), or \((a_3^2 + b_3^2) \gamma _2 - (a_2 a_3+ b_2 b_3) \gamma _3\ne 0\).
Subcase 1.2.1.1: \((a_3^2 + b_3^2) \gamma _2 - (a_2 a_3+ b_2 b_3) \gamma _3=0\). If we consider \(a_3^2 + b_3^2\ne 0\), by \((a_3^2 + b_3^2) \gamma _2 - (a_2 a_3+ b_2 b_3) \gamma _3=0\), we obtain
Hence from \(e_1\) we get
Now we introduce \(X_1\) into \(e_3\) and we obtain two options for \(Y_1\), namely \(Y_1^+\) and \(Y_1^-\), which satisfy
Then we have two real solutions, namely \(S^{\pm }=(X_0^{\pm },Y_0^{\pm },Z_0^{\pm },X_1^{\pm },Y_1^{\pm },Z_1^{\pm })\), but from (16), we have that \(X_0^{\pm }=X_1^{\pm }\). Moreover from equation (17) we obtain two options for \(Y_0\), this is,
Then by equations (19), (20) and (21), we have that
Then the solution
generates the same periodic orbit than the solution \(S^+\). Therefore we have proved that it is possible to have at most one real solution of system (6) and so at most one limit cycle that intersects the paraboloid \(P_E\) in two points.
If \(a_3^2 + b_3^2=0\), we can find the expression for \(X_1\) from equation \(e_1\) and substituting in equation \(e_3\) we get two options for \(Y_1\), namely \(Y_1^{\pm }\). Moreover these points satisfy that \(Y_1^++Y_1^-=-\gamma _2/\gamma _3\) and similarly to the above case, we obtain that \(Y_0^+=Y_1^-\) and \(Y_0^-=Y_1^+\) and so the two possible solutions \(S^{\pm }=(X_0^{\pm },Y_0^{\pm },Z_0^{\pm },X_1^{\pm },Y_1^{\pm },Z_1^{\pm })\) generate the same periodic orbit. In short, we can have at most one limit cycle.
Subcase 1.2.1.2: \((a_3^2 + b_3^2) \gamma _2 - (a_2 a_3+ b_2 b_3) \gamma _3\ne 0\). By equation \(e_1\) in (18) we obtain
Moreover we observe that
Then we have two reals solution, namely \(S^{\pm }=(X_0^{\pm },Y_0^{\pm },Z_0^{\pm },X_1^{\pm },Y_1^{\pm },Z_1^{\pm })\). Substituting \(Y_1^{\pm }\) in equation \(e_3\) in (18) we get expressions for \(X_1^{\pm }\). From (17) we have \(Y_0^{\pm }=-Y_1^{\pm }-\gamma _2/\gamma _3\). More precisely from (17) and (22) we have that
Then for conditions above and by (16) the solution \(S^{-}=(X_0,Y_0^{-},Z_0^{-},X_0,Y_1^{-},Z_1^{-})=(X_0,Y_1^{+},Z_1^{+},X_0,Y_0^{+},Z_0^{+})\), generates the same periodic orbit than the solution \(S^+\). Therefore we only have one real solution of system (6), and so at most one limit cycle.
Subcase 1.2.2: \(c_3 \gamma _2 - c_2 \gamma _3\ne 0.\) From equation \(e_4\) in (15) we get
Then substituting this expression into equations \(e_1\) and \(e_3\), they become
Where the expressions of the coefficients \(k_i\) for \(i=0,1,2,3\) are
The expressions of \(\eta _i\) for \(i=0,1,2,3\) are equals, only interchanging \(a_j\) by \(\alpha _j\) and \(b_j\) by \(\beta _j\) for \(j=1,2,3,4\).
We know that if \((Y_0, Y_1)\) is a solution of the system \(e_1=0\), \(e_3=0\), the point \(Y_0\) must be a root of the resultant of \(e_1\) and \(e_3\) with respect to the variable \(Y_1\). We denote such a resultant as \(R(Y_0)\). Moreover the point \(Y_1\) must be a root of the resultant of \(e_1\) and \(e_3\) with respect to the variable \(Y_0\), which we denote it as \(R(Y_1)\). In this case, it is possible to verify that by interchanging the variable \(Y_0\) by \(Y_1\), the expressions of the resultants \(R(Y_0)\) and \(R(Y_1)\) are the same. Moreover in this case the resultants are polynomials of degree 2. Then we would have at most two reals solutions \(Y_0\), \(Y_1\) for system \(e_1=0=e_3\), and consequently two real solutions \(S^{i}=(X_0^i,Y_0^i,Z_0^i,X_1^i,Y_1^i,Z_1^i)\) for system (6). But we can observe that if \((X_0, Y_0, Z_0, X_1, Y_1, Z_1)\) is a solution of system (6) then \((X_1, Y_1, Z_1, X_0, Y_0, Z_0)\) is also a solution, and this last solution generates the same periodic orbit than the first one. Therefore we can conclude that system (6) has at most one real solution and consequently the discontinuous piecewise differential system formed by the linear differential systems (2) and (5) has at most one limit cycle.
We do not give the explicit expressions of the polynomials \(R(Y_0)\) and \(R(Y_1)\) because their expressions are huge. These resultants can be computed immediately using an algebraic manipulator, such as Mathematica or Maple.
Case 2: \(c_3\gamma _3=0\). We have three subcases: \(c_3=\gamma _3=0\), or \(c_3=0\) and \(\gamma _3\ne 0\), or \(c_3\ne 0\) and \(\gamma _3=0\).
Subcase 2.1: \(c_3=\gamma _3=0\). Equation \(e_2\) in system (6) becomes
then we have two subcases \(c_2\ne 0\), or \(c_2=0\).
Subcase 2.1.1: \(c_2\ne 0\). From (23), we get
Then equation \(e_4\) in system (6) reduces to
First, we assume that \(c_2\gamma _1-c_1\gamma _2\ne 0\). Then from \(e_4\) we get \(X_0=X_1\), and from (24) we get \(Y_0=Y_1\). So we have that \(p_0=p_1\) and we do not have limit cycles.
Second we consider that \(c_2\gamma _1-c_1\gamma _2= 0\), that is, \(\gamma _1=c_1\gamma _2/c_2\). Then \(e_4\equiv 0\), and equation \(e_1\) becomes
Moreover, the expression for equation \(e_3\) are the same, changing \((a_1, a_2, a_3,a_4,b_1,b_2,b_3,b_4)\) by \((\alpha _1,\alpha _2,\alpha _3,\alpha _4,\beta _1,\beta _2,\beta _3,\beta _4)\). This means that we must solve system \(e_1=0=e_3\), which has two polynomial equations and three unknowns \(X_0, X_1, Y_0\). Hence, if there are solutions for this system, then it would have a continuum of solutions that produce a continuum of crossing periodic solutions and therefore we cannot have crossing limit cycles.
Subcase 2.1.2: \(c_2=0\). Equation (23) becomes
First, we consider that \(c_1\ne 0\). Then we have that \(X_0=X_1\) and equation \(e_4\) in system (6) reduces to
We observe that we can consider \(Y_0\ne Y_1\), because if \(Y_0=Y_1\) we have that \(p_0=p_1\) and we do not have limit cycles. Hence \(\gamma _2=0\) and equation
Moreover the expression for equation \(e_3\) is the same changing \(a_i\) by \(\alpha _i\) and \(b_i\) by \(\beta _i\), respectively, for \(i=1,2,3,4\). Then similar arguments used for Subcase 2.1.1 show that if system \(e_1=0=e_3\) has real solutions then it has a continuum of solutions and therefore we do not have limit cycles.
Second, if we consider \(c_1=0\), then we have \(c_2=0=c_3\). In this case, we obtain that the linear differential system (2) considered in the region \(\mathcal {R}_E^1\), becomes \(\dot{X}=0,\quad \dot{Y}=0,\quad \dot{Z}=0\) and so we cannot have limit cycles.
Subcase 2.2: \(c_3=0\) and \(\gamma _3\ne 0.\) Equation \(e_2\) in system (6) reduces to equation (23). Then we have two subcases \(c_2\ne 0\), or \(c_2=0\).
Subcase 2.2.1: \(c_2\ne 0\). From equation \(e_2\), we obtain the expression for \(Y_1\) given in (24). Then equation \(e_4\) in system (6) becomes
We can consider \(X_0\ne X_1\), because if \(X_0=X_1\), from equation (24), we get \(Y_0=Y_1\) and then \(p_0=p_1\) implying that we cannot have limit cycles. So, considering \(X_0\ne X_1\) in \(e_4\) (25), we get
Substituting \(Y_1\) and \(X_1\) in equations \(e_1\) and \(e_3\) of system (6), we have
and the expressions of the coefficients \(\lambda _i\) for \(i=0,1,2,3,4,5,6\) are
Moreover the expressions of \(\delta _i\) for \(i=0,1,2,3,4,5,6\) are equal, only interchanging \(a_j\) by \(\alpha _j\) and \(b_j\) by \(\beta _j\), respectively, for \(j=1,2,3,4\). We know that if \((X_0, Y_0)\) is a solution of the system \(e_1=0\), \(e_3=0\), the point \(X_0\) must be a root of the resultant of \(e_1\) and \(e_3\) with respect to the variable \(Y_0\), that we denote it by \(R(X_0)\). Moreover the point \(Y_0\) must be a root of the resultant of \(e_1\) and \(e_3\) with respect to the variable \(X_0\), which we denote by \(R(Y_0)\). In this case, it is possible to verify that \(R(Y_0)=R(X_0)=0\). Therefore we cannot have limit cycles.
Subcase 2.2.2: \(c_2=0\). Equation \(e_2\) given in (23) reduces to
First if we consider that \(c_1\ne 0\), then \(X_0=X_1\) and equation \(e_4\) in (6) becomes
We observe that we can consider \(Y_0\ne Y_1\), because if \(Y_0=Y_1\) we obtain that \(p_0=p_1\) and we cannot have limit cycles. Then from \(e_4\), we get \(Y_0=-(\gamma _2-Y_1\gamma _3)/\gamma _3\), and substituting them in equations \(e_1\) and \(e_3\) we obtain two polynomials of degree 4 whose resultants are zero. Therefore we cannot have limit cycles.
Second, we consider that \(c_1=0\). But then since \(c_2=c_3=0\), we obtain that the linear differential system (2) considered in the region \(\mathcal {R}_E^1\) becomes \(\dot{X}=0,\quad \dot{Y}=0,\quad \dot{Z}=0,\) and so we cannot have limit cycles.
Subcase 2.3: \(c_3\ne 0\) and \(\gamma _3=0\). The proof in this case is analogous to the Subcase 2.2 \(\square\)
Proof of statement (ii)
If the discontinuity surface is \(P_E\) it is sufficient to consider the discontinuous piecewise linear differential system formed by a linear differential center (1) in the region \(\mathcal {R}_E^1\) and an arbitrary linear differential center (5) in the region \(\mathcal {R}_E^2\). We have that this discontinuous piecewise differential system has no crossing periodic orbits. If the discontinuity surface is \(P_H\) we consider the linear differential systems (2) and (5) in \(\mathcal {R}_H^1\) and \(\mathcal {R}_H^2\), respectively, considering \(c_3=0=\gamma _3\), \(c_2\ne 0\), and \(c_2\gamma _1-c_1\gamma _2\ne 0\), as in the proof of Subcase 2.1.1 in a statement (i). In this case, we obtain that the unique real solution for system (4) is \((X_0, Y_0, Z_0, X_0, Y_0, Z_0)\) for \(X_0, Y_0, Z_0\in {\mathbb {R}}\), which do not generates crossing periodic orbits.
Proof of statement (iii)
First, we provide a discontinuous piecewise differential system that has a continuum of crossing periodic orbits when the discontinuity surface is \(P_E\). For this we consider in the region \(\mathcal {R}_E^1\) the linear differential system
and in the region \(\mathcal {R}_E^2\) the linear differential system
Considering \(Z_0=X_0^2+Y_0^2\) and \(Z_1=X_1^2+Y_1^2\) we get that system (6) is equivalent to
We observe that the points \(p_{0,1}=(\pm X_0,Y_0,Z_0)\) for \(X_0,Y_0,Z_0\in {\mathbb {R}}\) are solutions of system (28). Therefore, the discontinuous piecewise linear differential system formed by the differential systems (26) and (27) has a continuum of crossing periodic solutions, which intersect the paraboloid \(P_E\) at the two points \(p_0\) and \(p_1\). See the three crossing periodic solutions \(S^i=(p_0^i,p_1^i)\) for \(i=1,2,3\), of this continuum of crossing periodic solutions in Fig. 1, where
Now we consider that the discontinuity surface is \(P_H\) and we provide a discontinuous piecewise differential system that has a continuum of crossing periodic orbits. In the region \(\mathcal {R}_H^1\) we consider the linear differential system
and in the region \(\mathcal {R}_H^2\) the linear differential system
Considering \(Z_0=X_0^2-Y_0^2\) and \(Z_1=X_1^2-Y_1^2\) we get that system (4) is equivalent to
We observe that the points \(p_{0,1}=(\pm X_0,Y_0,Z_0)\) for \(X_0,Y_0,Z_0\in {\mathbb {R}}\) are solutions of system (31). Then, the discontinuous piecewise linear differential system formed by the differential systems (29) and (30) has a continuum of crossing periodic solutions, which intersect the paraboloid \(P_H\) at the two points \(p_0\) and \(p_1\). See the three crossing periodic solutions \(S^i=(p_0^i,p_1^i)\) for \(i=1,2,3\), of this continuum of crossing periodic solutions in Fig. 2, where
Proof of statement (iv)
We provide two examples of discontinuous piecewise differential systems separated by either \(P_E\) or \(P_H\) and which have one crossing limit cycle. With these examples we can conclude that the upper bound found is reached.
First, we provide a discontinuous piecewise differential system whose discontinuity surface is \(P_E\) and that has one crossing limit cycle. In the region \(\mathcal {R}_E^1\) we consider the linear differential system
and in the region \(\mathcal {R}_E^2\) the linear differential system
With these linear differential systems, system (6) has only one real solution which generates one limit cycle that intersects the paraboloid \(P_E\) in two different points \(p_0=(X_0, Y_0, Z_0)\) and \(p_1=(X_1, Y_1, Z_1)\), namely
See this crossing limit cycle in Fig. 3.
Now we provide a discontinuous piecewise differential system whose discontinuity surface is \(P_H\) and that has one crossing limit cycle. We consider in the region \(\mathcal {R}_H^1\) the linear differential system
and in the region \(\mathcal {R}_H^2\) the linear differential system
With these linear differential systems, system (4) has only one real solution which generates one crossing limit cycle that intersects the paraboloid \(P_H\) in two different points \(p_0= (X_0,Y_0, Z_0)\) and \(p_1=(X_1, Y_1, Z_1)\), namely
See this crossing limit cycle in Fig. 4.
This completes the proof of Theorem 1.
Conclusions
In Theorem 1 we have solved the extension of the 16th Hilbert problem to the discontinuous piecewise linear differential systems formed by linear centers and separated by a paraboloid (elliptic or hyperbolic) restricted to the crossing limit cycles which intersect the quadric in two points. We recall that this problem was studied intensively in the plane but this is not the case for piecewise differential systems in higher dimensions.
Data Availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Andronov, A., Vitt, A.M., Khaikin, S.: Theory of Oscillations. Pergamon Press, Oxford (1966)
Benterki, R., Damene, L., Llibre, J.: The limit cycles of discontinuous piecewise linear differential systems formed by centers and separated by irreducible cubic curves II. Differ. Equ. Dyn, Syst (2021)
Brunella, M.: Instability of equilibria in dimension three. Annales de l’Institut Fourier 48(5), 1345–1357 (1998)
Buzzi, C., Romano, Y., Llibre, J.: Crossing limit cycles of planar discontinuous piecewise differential systems formed by isochronous centres. Dyn. Syst. 37(4), 710–728 (2022)
di Bernardo, M., Budd, C.J., Champneys, A.R., Kowalczyk, P.: Piecewise-Smooth Dynamical Systems: Theory and Applications, Applied Mathematical Sciences Series, vol. 163. Springer-Verlag, London (2008)
Dulac, H.: Détermination et intégration d’une certaine classe d’équations différentielles ayant pour point singulier un centre. Bull. Sci. math. Sér. 2(32), 230–252 (1908)
Jimenez, J.J., Llibre, J., Medrado, J.C.: Crossing limit cycles for a class of piecewise linear differential centers separated by a conic. Electron. J. Differ. Equ. 41, 36 (2020)
Jimenez, J.J., Llibre, J., Medrado, J.C.: Crossing limit cycles for piecewise linear differential centers separated by a reducible cubic curve. Electron. J. Qual. Theory Differ. Equ. 19, 48 (2020)
Llibre, J., Nuñez, E., Teruel, A.E.: Limit cycles for planar piecewise linear differential systems via first integrals. Qual. Theory Dyn. Syst. 3(1), 29–50 (2002)
Llibre, J., Teixeira, M.A.: Periodic orbits of continuous and discontinuous piecewise linear differential systems via first integrals. São Paulo J. Math. Sci. 12(1), 121–135 (2018)
Llibre, J., Teixeira, M.A.: Piecewise linear differential systems with only centers can create limit cycles? Nonlinear Dyn. 91, 249–255 (2018)
Llibre, J., Tonon, D., Velter, M.: Crossing periodic orbits via first integrals. Int. J. Bifurc. Chaos 30(11), 2050163 (2020)
Llibre, J., Valls, C.: Crossing limit cycles for discontinuous piecewise differential systems formed by linear Hamiltonian saddles or linear centers separated by a conic. Chaos Solit. Fractals 159, 112076 (2022)
Makarenkov, O., Lamb, J.S.W.: Dynamics and bifurcations of nonsmooth systems: a survey. Physica D 241, 1826–1844 (2012)
Poincaré, H.: Mémoire sur les courbes définies par une équation différentielle. J. de Mathématiques 37, 375–422 (1881)
Poincaré, H.: Mémoire sur les courbes définies par une équation différentielle. J. de Mathématiques 8, 251–296 (1882)
Poincaré, H.: Mémoire sur les courbes définies par une équation différentielle, Oeuvres de Henri Poincaré, vol. I, pp. 3–84. Gauthier-Villars, Paris (1951)
Simpson, D.J.W.: Bifurcations in Piecewise-Smooth Continuous Systems, World Scientific Series on Nonlinear Science A, vol. 69. World Scientific, Singapore (2010)
Van der Pol, B.: A theory of the amplitude of free and forced triode vibrations. Radio Rev. 1, 701–710 (1920)
Van der Pol, B.: On relaxation-oscillations. Lond. Edinb. Dublin Philos. Mag. J. Sci. 2(7), 978–992 (1926)
Acknowledgements
The first author is supported by the Agencia Estatal de Investigación grant PID2019-104658GB-I00. The second author is partially supported by the Agencia Estatal de Investigación grant PID2019-104658GB-I00, and the H2020 European Research Council grant MSCA-RISE-2017-777911. The third author is partially supported through CAMGSD, IST-ID, projects UIDB/04459/2020 and UIDP/04459/2020.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Jimenez, J., Llibre, J. & Valls, C. Limit Cycles for Discontinuous Piecewise Differential Systems in \(\mathbb {R}^3\) Separated by a Paraboloid. Differ Equ Dyn Syst (2023). https://doi.org/10.1007/s12591-023-00668-5
Accepted:
Published:
DOI: https://doi.org/10.1007/s12591-023-00668-5