
Abstract
The study of limit cycles of planar differential systems is one of the main and difficult problems for understanding their dynamics. Thus the objective of this paper is to study the limit cycles of continuous piecewise differential systems in the plane separated by a non-regular line \(\Sigma .\) More precisely, we show that a class of continuous piecewise differential systems formed by an arbitrary quadratic center, an arbitrary linear center and the linear center \(\dot{x}=-y,\ \dot{y}=x\) have at most two crossing limit cycles and we find examples of such systems with one crossing limit cycle. So we have solved the extension of the 16th Hilbert problem to this class of piecewise differential systems providing an upper bound for its maximum number of limit cycles.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction and statement of the main results
The study of the existence of the so-called limit cycles of a planar differential system, i.e. existence of periodic orbits isolated in the set of all periodic orbits of that system is one of the main difficulties for completely understanding (at least qualitatively) its dynamics. In particular to find a limit cycle of a given class of differential systems is very difficult and to provide an upper bound on the maximum number of them is even harder. When such an upper bound exists, additional difficulties arise when trying to prove that such upper bound is achieved.
In this paper we shall study the limit cycles of a class of piecewise differential systems. These systems have been studied intensively these last decades due to their applications, see for instance the books [1, 4, 20] and the papers [19, 21].
For planar piecewise differential systems with separation curve \(\Sigma =\{h^{-1}(0)\}\) where \(h:{\mathbb {R}}^2\rightarrow {\mathbb {R}}\) (being bi-valuated on the separation curve for the vector fields X and Y) a point \(p=(x,y)\) in \(\Sigma \) is a crossing point if \(Xh(p)\cdot Yh(p)>0,\) where \(\cdot \) denotes the inner product of two vectors, for more details see Filippov [5]. If there exist a periodic orbit of that piecewise differential system such that all the points of the orbit on \(\Sigma \) are crossing points, then we call it a crossing periodic orbit. A crossing limit cycle is an isolated periodic orbit in the set all crossing periodic orbits of the differential system.
The crossing limit cycles of different classes of piecewise differential systems have been studied by many authors during these last years, see for instance [2, 3, 6, 7, 9, 11,12,13,14,15,16,17,18].
In this paper we study the maximum number of crossing limit cycles of the class of planar continuous piecewise differential systems separated by the non-regular line
The three components of \({\mathbb {R}}^2 \setminus \Sigma \) are the positive or first quadrant
the second quadrant
and the half-plane
More precisely, in the region \(R_1\) we consider an arbitrary quadratic differential system
with \(c_i,d_i \in {\mathbb {R}}\) for \(i=0,\ldots , 5.\) In the region \(R_2\) we consider an arbitrary linear center
with \(a_i,b_i \in {\mathbb {R}}\) for \(i=0,1,2,\) and in the region \(R_3\) we consider the linear center
Our main result is the following.
Theorem 1
Any continuous piecewise differential system in the plane formed by systems (1) in \(R_1,\) systems (2) in \(R_2\) and systems (3) in \(R_3\) separated by the non-regular line \(\Sigma \) has at most two crossing limit cycles. Moreover we provide an example of such a system with one crossing limit cycle.
The proof of Theorem 1 is given in Sect. 2. Note that Theorem 1 provides a positive answer to the extension of the 16th Hilbert problem [8] for the class of continuous piecewise differential systems separated by a non-regular line \(\Sigma \) and formed by the above differential systems. Note that although two is the maximum number of crossing limit cycles that the above mentioned system can have, we are only able to find examples of these piecewise differential systems with one crossing limit cycle. So it remains open if the upper bound of two is reached or not.
2 Proof of Theorem 1
Before proving Theorem 1 we recall that a set of functions \(\{f_0, f_1, \ldots ,f_n \}\) is an extended complete Chebyshev system on \({\mathbb {R}}^+\) if and only if the Wronskians
on \({\mathbb {R}}^+\) for \(k=0,1,\ldots ,n.\) Moreover for an extended complete Chebyshev system in \({\mathbb {R}}^+\) we have the following well-known result, for a proof see for instance [10].
Theorem 2
Assume that the functions \(f_0, f_1,\ldots , f_n\) form an extended complete Chebyshev system in \({\mathbb {R}}^+.\) Then the maximum number of zeros of the function
in \({\mathbb {R}}^+\) is n. Furthermore, if we can choose the coefficients \(a_0, a_1,\ldots ,a_n\) arbitrarily there are functions of the form in (4) having exactly n zeros in \({\mathbb {R}}^+.\)
We separate the proof of Theorem 1 in two parts: the part concerning the upper bound and the part providing an example with one crossing limit cycle.
First note that in Theorem 1 we are assuming that the piecewise differential system must be continuous, and so systems (1) and (2) must coincide on \(\{x= 0, y\ge 0\},\) systems (2) and (3) must coincide on \(\{x\le 0, y=0\},\) and systems (3) and (1) must coincide on \(\{x\ge 0, y=0\}.\) Imposing these three conditions we obtain that
and the continuous piecewise differential system to study is the one formed by the following three differential systems
Note that \(c_4^2+d_4^2 \ne 0,\) otherwise the first system in (5) will not be a quadratic system. Moreover, if \(c_2=0\) then in the second system in (5) we have \(\dot{x}=0,\) so its solutions live on the straight lines \(x=\) constant and then the piecewise differential system cannot have crossing periodic orbits. Hence we have that \(c_2 (c_4^2 +d_4^2) \ne 0.\)
2.1 The upper bound
We start imposing that the quadratic system in (1) has a center. The equilibrium points of such a quadratic system are
Since \(c_2 (c_4^2+d_4^2 ) \ne 0\) we have \(c_4^2 +(c_4 d_2 -c_2 d_4)^2 \ne 0.\) We consider different cases:
Case 1: \(c_4(c_4 d_2-c_2d_4)\ne 0.\) In this case we define
and
where T, D and \(\Delta \) are, respectively, the trace, the determinant and the discriminant associated to the linear part of the quadratic system in (5). Then at the equilibrium point \(E_0\) we obtain
and at the equilibrium point \(E_1\) we have
and
Observe that \(E_1\) cannot be a center because \(\Delta _1 \ge 0.\) On the other hand \(E_0\) is either a weak focus or a center if and only if \(D_0>0,\) \(\Delta _0<0\) and \(T_0=0.\) Thus, \(c_2<0\) (that we can write as \(c_2=-c^2\) with \(c > 0\)), \(d_2=0\) and \(c_4 d_4\ne 0.\)
Hence the quadratic system in the region \(R_1\) is
and the arbitrary linear system in the region \(R_2\) is
Note that in system (6) we can assume without loss of generality that \(c_4<0\) and \(d_4>0.\) Indeed, if originally \(c_4>0\) then doing the change of variables \((x,y,t)\rightarrow (-x,y,-t),\) \(c_4\) becomes negative, and if originally \(d_4<0\) then doing the change of variables \((x,y,t)\rightarrow (x,-y,-t),\) \(d_4\) becomes positive.
The first integrals for systems (6), (7) and (3) are
as it is easy to check. The existence of the first integral \(H_1(x,y)\) defined in the point (0, 0) forces that the equilibrium (0, 0) of the quadratic system (6) is a center.
Now we study the limit cycles of these continuous piecewise differential systems which intersect the non-regular line of discontinuity \(\Sigma \) in the points \((x_1,0),\) \((0,y_1)\) and \((x_2,0)\) with \(x_1>0,\ y_1>0\) and \(x_2<0.\) These points must satisfy
or equivalently
Solving \(e_2=0\) and \(e_3=0\) we obtain
Substituting \(y_1\) into \(e_1=0\) we get
which can be written as
We note that this last equation in the particular case \(c=1\) and \(c_4=-d_4,\) assumes the form
Which does not vanish in \({\mathbb {R}}^+=(0,\infty )\) because \(x_1=-1/d_4<0\) with \(d_4>0\) and the other is \(x_1=0.\) So there is not limit cycle for the system (8) when \(c=1\) and \(c_4=-d_4.\)
We write the equation in (9) as
where
and
The functions \(f_0,\) \(f_1\) and \(f_2\) form an extended Chebyshev system on \({\mathbb {R}}^+\) because the Wronskians of these functions are
and
which does not vanish in \({\mathbb {R}}^+=(0,\infty )\) because from the three zeros of this last Wronskian two are negative (namely \(c^2/c_4\) and \(-\frac{2 c^2}{c d_4-c_4}\)) and the other is the 0. In view of Theorem 2 the function (10) has at most two zeros and so the piecewise differential system has at most two limit cycles in this case. The upper bound provided by the theorem is proved in this case.
Note that from Theorem 2 we cannot say that the Eq. (9) has values of the parameters c, \(c_4\) and \(d_4\) for which it has exactly two zeros, because the coefficients \(a_0,\) \(a_1\) and \(a_2\) are not free parameters. Moreover we also do not know if the possible zeros of the Eq. (9) are positive.
Case 2: \(c_4\ne 0\) and \(c_4 d_2-c_2 d_4 = 0.\) We write this condition as \(c_4\ne 0\) and \(d_2=c_2 d_4/c_4.\) In this case, system (5) becomes
Taking into account that \(c_2 \ne 0,\) the quadratic system in (11) has a unique equilibrium \(E_0=(0,0).\) So, the trace and the determinant associated to the linear part of the quadratic system in (11) at \(E_0\) are \(c_2 d_4/c_4\) and \(-c_2,\) respectively. In order that \(E_0\) can be a weak focus or a center, we must have that \(d_4=0\) and \(c_2=-c^2 <0\) with \(c>0.\) Now system (11) is written as
with first integrals
The existence of the first integral \(H_1(x,y)\) defined in the point (0, 0) forces that the equilibrium (0, 0) of the quadratic system in (11) is a center.
Assume that this continuous piecewise differential system has some crossing limit cycle with the points intersecting \(\Sigma \) being \((x_1,0),\) \((0,y_1)\) and \((x_2,0)\) with \(x_1>0,\) \(y_1>0,\) \(x_2<0.\) Then the first integrals given in (12) must satisfy system (8), or equivalently,
From equations \(e_2=0\) and \(e_3=0,\) we get \(x_2=-x_1\) and \(y_1=\dfrac{x_1}{c}.\) Introducing \(x_2\) and \(y_1\) in \(e_1=0\) we obtain
which can be written as
Note that Eq. (13) can be written as (10), where
and
The functions \(f_0,\) \(f_1\) and \(f_2\) form an extended Chebyshev system on \({\mathbb {R}}^+\) because the Wronskians of these functions are
and
which does not vanish in \({\mathbb {R}}^+\) because its two zeros are one negative (namely \(-\frac{2 c^2}{c_4}\)) and the other is the 0. In view of Theorem 2 the function (13) has at most two zeros. So the piecewise differential system has at most two limit cycles in this case. Hence the upper bound provided by the theorem is proved in this case.
Case 3: \(c_4=0\) and \(-c_2 d_4\ne 0.\) System (5) becomes
The quadratic system in (14) has a unique equilibrium point \(E_0=(0,0).\) The trace and the determinant associated to the linear part of the quadratic system in (14) are \(d_2\) and \(-c_2,\) respectively. The point \(E_0\) is either a weak focus or a center if and only if \(d_2=0\) and \(c_2=-c^2\) with \(c>0.\) So taking \(d_2=0\) and \(c_2=-c^2,\) system (14) is equivalently to
with first integrals
The existence of the first integral \(H_1(x,y)\) defined in the point (0, 0) forces that the equilibrium (0, 0) of the quadratic system in (14) is a center.
Now repeating the same steps as the ones in the proof of Case 2, we get
where
and
The Wronskians of these functions are
and
which does not vanish in \({\mathbb {R}}^+\) because has two solutions, namely \(\frac{2c}{d_4}\) and 0. So, by Theorem 2 the function (16) has at most two zeros and we conclude that (15) has at most two limit cycles which proves the upper bound in the theorem in this case.
2.2 The example
The planar continuous piecewise differential system separated by \(\Sigma \) and formed by the quadratic center and the two linear centers
with the first integrals
has one crossing limit cycle. Indeed, for this differential system equation (9) is
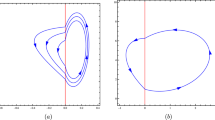
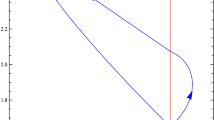
This equation has the approximated solution \(x_1=0.0000583439..\) and then system (17) has a unique solution
which provides the limit cycle of Fig. 1. This limit cycle is a crossing limit cycle which is traveled in counterclockwise sense.

The unique crossing limit cycle of the continuous piecewise differential system (17)
Data availability
Data sharing is not applicable to this article as no new data were created or analyzed in this study.
References
Andronov, A., Vitt, A., Khaikin, S.: Theory of Oscillations. Pergamon Press, Oxford (1966)
Braga, D.C., Mello, L.F.: Limit cycles in a family of discontinuous piecewise linear differential systems with two zones in the plane. Nonlinear Dyn. 73, 1283–1288 (2013)
Buzzi, C., Pessoa, C., Torregrosa, J.: Piecewise linear perturbations of a linear center. Discret. Contin. Dyn. Syst. 9, 3915–3936 (2013)
Di Bernardo, M., Budd, C.J., Champneys, A.R., Kowalczyk, P.: Piecewise-Smooth Dynamical Systems: Theory and Applications. Applied Mathematical Sciences Series, vol. 163. Springer, London (2008)
Filippov, A.F.: Differential Equations with Discontinuous Right-Hand Sides, Translated from Russian. Mathematics and Its Applications (Soviet Series), vol. 18. Kluwer Academic Publishers Group, Dordrecht (1988)
Freire, E., Ponce, E., Torres, F.: A general mechanism to generate three limit cycles in planar Filippov systems with two zones. Nonlinear Dyn. 78, 251–263 (2014)
Giannakopoulos, F., Pliete, K.: Planar systems of piecewise linear differential equations with a line of discontinuity. Nonlinearity 14, 1611–1632 (2001)
Hilbert, D.: Mathematische Probleme, Lecture, Second Internat. Congr. Math. (Paris, 1900), Nachr. Ges. Wiss. Göttingen Math. Phys. KL., pp. 253–297 (1900). [English transl., Bull. Amer. Math. Soc. 8, 437–479 (1902); Bull. (New Series) Amer. Math. Soc. 37, 407–436 (2000)]
Huan, S.M., Yang, X.S.: On the number of limit cycles in general planar piecewise linear systems. Discret. Contin. Dyn. Syst. Ser. A 32, 2147–2164 (2012)
Karlin, S., Studden, W.J.: Tchebycheff Systems: With Applications in Analysis and Statistics. Pure and Applied Mathematics, vol. XV. Interscience Publishers John Wiley & Sons, New York (1966)
Li, L.: Three crossing limit cycles in planar piecewise linear systems with saddle-focus type. Electron. J. Qual. Theory Differ. Equ. 70, 1–14 (2014)
Llibre, J., Novaes, D., Teixeira, M.A.: Maximum number of limit cycles for certain piecewise linear dynamical systems. Nonlinear Dyn. 82, 1159–1175 (2015)
Llibre, J., Ordóñez, M., Ponce, E.: On the existence and uniqueness of limit cycles in a planar piecewise linear systems without symmetry. Nonlinear Anal. Ser. B RealWorld Appl. 14, 2002–2012 (2013)
Llibre, J., Ponce, E.: Three nested limit cycles in discontinuous piecewise linear differential systems with two zones. Dyn. Contin. Discret. Impul. Syst. Ser. B 19, 325–335 (2012)
Llibre, J., Teixeira, M.A.: Piecewise linear differential systems with only centers can create limit cycles? Nonlinear Dyn. 91, 249–255 (2018)
Llibre, J., Valls, C.: Limit cycles of piecewise differential systems with only linear Hamiltonian saddles. Symmetry 13, 1128 (2021)
Llibre, J., Zhang, X.: Limit cycles for discontinuous planar piecewise linear differential systems separated by one straight line and having a center. J. Math. Anal. Appl. 467(1), 537–549 (2018)
Llibre, J., Zhang, X.: Limit cycles created by piecewise linear centers. Chaos 29, 053116 (2019)
Makarenkov, O., Lamb, J.S.W.: Dynamics and bifurcations of nonsmooth systems: a survey. Physica D 241, 1826–1844 (2012)
Simpson, D.J.W.: Bifurcations in Piecewise-Smooth Continuous Systems, World Scientific Series on Nonlinear Science A, vol. 69. World Scientific, Singapore (2010)
Teixeira, M.A.: Perturbation theory for non-smooth systems. In: Robert, A.M. (ed.) Mathematics of Complexity and Dynamical Systems, vols. 1–3, pp. 1325–1336. Springer, New York (2012)
Acknowledgements
The second author is supported by the Agencia Estatal de Investigación grants PID2019-104658GB-I00, and the H2020 European Research Council Grant MSCA-RISE-2017-777911. The third author is partially supported by FCT/Portugal through UID/MAT/04459/2019.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Ethical standard
The authors state that this research complies with ethical standards.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Anacleto, M.E., Llibre, J., Valls, C. et al. Limit cycles of a continuous piecewise differential system formed by a quadratic center and two linear centers. Bol. Soc. Mat. Mex. 29, 29 (2023). https://doi.org/10.1007/s40590-023-00501-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40590-023-00501-7