
Abstract
Environmental noise and infectious diseases are important factors affecting the development of the population. This paper develops a mathematical system to investigate the impacts of environmental noise and infectious diseases on predator–prey interactions. The globally unique positive solution is confirmed by using conventional methods. The stochastic uniform boundedness of the solution is obtained under certain conditions. Sufficient conditions for the persistence and extinction are given to measure the level of population size. Asymptotic dynamics of the solutions are carried out by two criteria parameters. The long-term dynamics of the solutions are demonstrated by numerical simulations. The results show that small-intensity environmental perturbations can cause population size to fluctuate around a certain level, while high-intensity environmental perturbations may lead to population extinction.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Interaction between predator and prey is one of the cornerstones in bio and ecosystems. Understanding the mechanism behind is of great significance for maintaining species diversity, and therefore it remains high attention in many fields of science [26,27,28, 31, 35]. Mathematically, the basic frameworks of this kind of interaction can be described as
The biological meanings of parameters and functions appeared are listed in Table 1. System (1) and its variants have extensively studied with attempts to understand the predator–prey interactions [19, 20, 22, 23]. However, the system (1) does not include the effect of infectious diseases on predator–prey interactions explicitly. Recently, Hethcote et al. [14] reported that the prevalence of infectious diseases is one of the main factors that is troubling the development of the population community. The spread of diseases in populations can lead to an increase in mortality, and predators can catch more infected prey. Thus, it has practical significance to gain deep insights into understanding the transmission dynamics of diseases in predator–prey interactions, but there are limited literature in this regards [5, 13, 16, 17, 25].
May [24] pointed out that birth rate, mortality rate and some other parameters related to population interactions could be affected by environmental noise. The biosphere environment is often changeable, and stochastic noise is also the cause leading to the extinction of individuals. By running a stochastic system several times, we can obtain the distribution of the predicted number of individuals, while a deterministic system will give a single predicted value. Traditionally, there are two common ways to introduce stochastic factors into deterministic population models. One is to assume that the predator–prey interactions are subject to some small random fluctuations. Physically, these small random fluctuations can be described by white noise [4, 6, 9, 11]. Another is to assume that the predator–prey interactions are subject to sudden catastrophic shocks including earthquake, flood, and drought. These catastrophic shocks can be described mathematically by the Lévy process [2, 21]. Several recent studies on predator–prey interactions have focused on the effects of environmental noise [1, 7, 10]. They played an irreplaceable role in studying the effects of diseases on predator–prey interactions. However, most of these models have considered either white noise or Lévy noise alone. Based on the work of [32], here we shall propose a new model, which allows us to examine the effects of white noise, Lévy noise as well as the diseases on the predator–prey interactions.
The paper is arranged as follows. We will, in Sect. 2, formulate the system and then prove some preliminary results. It is then followed by exploring the asymptotic dynamics of the model. Numerical simulations will be conducted in Sect. 4, to illustrate the dynamics of the stochastic system. Finally, we conclude our study with a brief discussion in Sect. 5.
2 Model Formulation and Preliminaries
Let I(t) be the abundance of the infected prey, function g(S, I) the infection rate of I(t), b(I, Y) the attack rate of Y(t) on I(t), \(mb(I,Y),~0\le m\le 1\) the conversion rate from the infected prey to the predator, and \(M_I(I)\) the mortality rate of the infected prey. Supposing that the diseases spread only among the prey yields
where we take
as in [32], \(f(S,Y)=0\) and \(b(I,Y)=pIY,~p>0\), indicating that healthy prey has an absolute escape advantage over infected prey, and \(g(S,I)=\beta SI\). In general, depending on the case in question, \(M_I(I)\) and \(M_Y(Y)\) may take different forms, such as the linear mortality [37], the quadratic mortality [3, 12] and the hyperbolic mortality [36]. In this paper, the mortality rates take forms of
where c denotes the disease-related death rate of the infected prey. w is the density dependence of the infected prey, d is the death rate of Y(t), h is the density dependence of the predator. Please note that when \(w=h=0,\) Eq. (3) are linear mortality rates; however, when \(c=d=0\) they quadratic mortality rates. The mortality rate of Eq. (3) has been used in modeling ecosystems of marine bays in [12]. With these specifics, we reach
Using the similar argument as [8], we can prove
Proposition 2.1
Let \(R_0=\frac{K\beta }{c}\) and \(R_1=\frac{mp}{d}\frac{r(K\beta -c)}{K\beta ^2+wr}\). Then, for system (4), we know that
-
(1)
if \(R_0<1\), the disease-free equilibrium \(E_1(K,0,0)\) is globally asymptotically stable (GAS);
-
(2)
if \(R_0>1\) and \(R_1<1\), there exists a unique boundary equilibrium \(E_2(\overline{S},\overline{I},0)=\left( \frac{K(wr+\beta c)}{K\beta ^2+wr},\frac{r(K\beta -c)}{K\beta ^2+wr},0\right) ,\) which is GAS, while \(E_1\) is unstable;
-
(3)
if \(R_1>1\), there exists a unique positive equilibrium
$$\begin{aligned} E_3(S^*,I^*,Y^*)=\left( \frac{K\left( r-\beta I^*\right) }{r},\frac{K\beta rh+dpr-crh}{Kh\beta ^2+mp^2r+wrh},\frac{mpI^*-d}{h}\right) , \end{aligned}$$which is GAS, while both \(E_1\) and \(E_2\) are unstable.
To incorporate small stochastic noise into the deterministic system (4), for any initial value \(X_0\) and and \(0\le \varDelta t\ll 1\) we assume that the solution \(X_t=(S_t,I_t,Y_t)'\) is a Markov process with the conditional mean
and the conditional variance
With these considerations, we obtain the stochastic version of the system (4) as follows:
where \(B_i(t)~(i=1,2,3)\) present the standard Brownian motions with intensities \(\sigma _i^2\). Similarly, we can obtain the stochastic Lévy predator–prey system as follows accounted for the sudden catastrophic shocks
where \(\widetilde{\varGamma }(dt,du)=\varGamma (dt,du)-\lambda (du)dt\), \(\varGamma \) is a Poisson counting measure on a measureable subset \({\mathbb {Z}}\) of \((0, \infty )\), and \(\lambda \) is the characteristic measure of the Poisson counting measure \(\varGamma \) with \(\lambda ({\mathbb {Z}})<\infty .\)
Next, we will investigate model (6). For the sake of following discussion, we define
and introduce
Definition 2.1
System (6) is called stochastically ultimately bounded if for any \(\varepsilon \in (0,1)\) there exists a \(\chi (=\chi (\omega ))>0\) such that
3 Main Results
Define
Applying the same argument as in [33], we have the following result, which suggests the solution of (6) is always biological meaningful.
Theorem 3.1
Given \((S(0),I(0),Y(0))\in {\mathbb {R}}^3_+\). System (6) has a unique positive solution on \(t\ge 0\) with probability one.
Theorem 3.2
The solution of (6) determined by Theorem 3.1 is stochastically ultimately bounded, i.e.,
provided \(\frac{r}{K}>\frac{2\beta }{3}, w>\frac{\beta +2mp}{3}\) and \(h>\frac{mp}{3}\).
Proof
Define \(V(S,I,Y)=S^{\frac{1}{2}}+I^{\frac{1}{2}}+Y^{\frac{1}{2}}.\) By Itô’s formula, we obtain
where
By the Hölder inequation \(ab\le \frac{a^p}{p}+\frac{b^q}{q},\frac{1}{p}+\frac{1}{q}=1 (p,q>1)\), we have
Thus
Applying Itô’s formula to \(e^tV(S,I,Y)\) yields
Therefore we have
and
By elementary inequality
we have
For any \(\varepsilon >0\), set \(\chi =\frac{H^2}{\varepsilon ^2}\), the Chebyshev inequality implies
namely,
The proof is complete. \(\square \)
To study the persistence and extinction of Eq. (6), we define:
and
Theorem 3.3
For the solution of (6) determined by Theorem 3.1, we have
-
(i)
If \(r<\frac{\sigma _1^2}{2}+\int _{\mathbb {Z}}[\gamma _1(u)-\ln (1+\gamma _1(u))]\lambda (du),\) then we have
$$\begin{aligned} \lim _{t\rightarrow +\infty }S(t)=0, \lim _{t\rightarrow +\infty }I(t)=0,~\lim _{t\rightarrow +\infty }Y(t)=0~~\text {a.s.(almost surely)}, \end{aligned}$$i.e., the predator and prey populations are die out.
-
(ii)
If \(R_{11}>1\) and \(R_{12}>1\), then we have
$$\begin{aligned} S(t)\rangle _*>0,~~\langle I(t)\rangle _*>0,~~\langle Y(t)\rangle _*>0~~a.s., \end{aligned}$$i.e., the predator and prey populations are persistence in the mean.
Proof
Case (i). For the first equation of system (6), we apply the Itô’s formula, resulting
integrating both sides of which gives
By using [21], we obtain \( \lim _{t\rightarrow +\infty }S(t)=0~~a.s. \) Similarly, we have
Since \(\lim _{t\rightarrow +\infty }S(t)=0\), for sufficiently large T, there is a constant \(\varepsilon >0\) such that
Thus,
Note that
We conclude by \(\lim _{t\rightarrow +\infty }I(t)=0\) that
Case (ii). From (7) and [21], we have
substituting which into (8) gives
Thus,
Using a result from [21],
Similarly, by (11) and (9) one can obtain
Thus,
Equations (12), (13) and (8) yield
Note that
We have
Substituting Eq. (14) into Eq. (9), we have
Since \(R_{12}>1\), we obtain
The proof is complete. \(\square \)
Notes. Theorem 3.3 shows us the dynamics of birth and death of the prey-predator system. By Theorem 3.3, if \(r<\frac{\sigma _1^2}{2}+\int _{\mathbb {Z}}[\gamma _1(u)-\ln (1+\gamma _1(u))]\lambda (du)\), then the predator and prey are die out; while if \(R_{11}>1\) and \(R_{12}>1\), then the predator and prey are persistence in mean. Note that the right end of inequality \(r<\frac{\sigma _1^2}{2}+\int _{\mathbb {Z}}[\gamma _1(u)-\ln (1+\gamma _1(u))]\lambda (du)\) is a function of the intensity of noise and is positively correlated with the intensity of noise. This shows that as long as the intensity of the stochastic noise is large enough, we have \(r<\frac{\sigma _1^2}{2}+\int _{\mathbb {Z}}[\gamma _1(u)-\ln (1+\gamma _1(u))]\lambda (du)\), which means that large environmental disturbances can lead to the extinction of the population.
Theorem 3.4
For the solution of (6), we have
-
(i)
if \(R_0<1\), then
$$\begin{aligned} \begin{aligned} F_1(S,I,V):=&\limsup _{t\rightarrow \infty }\frac{1}{t}{\mathbb {E}}\int _0^t\left[ (S(s)-K)^2+I^2(s)+Y^2(s)\right] ds\le \frac{\delta _1}{\varTheta }; \end{aligned} \end{aligned}$$ -
(ii)
if \(R_0>1\) and \(R_1<1,\) then
$$\begin{aligned} \begin{aligned} F_2(S,I,V):= \limsup _{t\rightarrow \infty }\frac{1}{t}{\mathbb {E}}\int _0^t\left[ (S(s)-\overline{S})^2+(I(s)-\overline{I})^2+Y^2(s)\right] ds\le \frac{\delta _2}{\varTheta }; \end{aligned} \end{aligned}$$ -
(iii)
if \(R_1>1,\) then
$$\begin{aligned} \begin{aligned} F_3(S,I,V):=&\limsup _{t\rightarrow \infty }\frac{1}{t}{\mathbb {E}}\int _0^t\left[ (S(s){-}S^*)^2{+}(I(s){-}I^*)^2{+}(Y(s){-}Y^*)^2\right] ds \\ \le&\frac{\delta _3}{\varTheta }, \end{aligned} \end{aligned}$$where \(\varTheta =\min \bigg \{\frac{r}{K},w,\frac{h}{m}\bigg \}\) and
$$\begin{aligned} \begin{aligned} \delta _1=&\frac{1}{2}\sigma _1^2K+K\int _{\mathbb {Z}}[\gamma _1(u)-\ln (1+\gamma _1(u))]\lambda (du),\\ \delta _2=&\frac{\sigma _1^2\overline{S}}{2}+\frac{\sigma _2^2\overline{I}}{2}+\overline{S}\int _{\mathbb {Z}}[\gamma _1(u)-\ln (1+\gamma _1(u))]\lambda (du)\\&+\overline{I}\int _{\mathbb {Z}}[\gamma _2(u)-\ln (1+\gamma _2(u))]\lambda (du),\\ \delta _3=&\frac{1}{2}\sigma _1^2S^*+\frac{1}{2}\sigma _2^2I^*+\frac{1}{2m}\sigma _3^2Y^*+S^*\int _{\mathbb {Z}}[\gamma _1(u)-\ln (1+\gamma _1(u))]\lambda (du)\\&+I^*\int _{\mathbb {Z}}[\gamma _2(u)-\ln (1+\gamma _2(u))]\lambda (du)\\&+\frac{1}{m}Y^*\int _{\mathbb {Z}}[\gamma _3(u)-\ln (1+\gamma _3(u))]\lambda (du).\\ \end{aligned} \end{aligned}$$
Proof
Case (iii). Since \((S^*,I^*,Y^*)\) is the positive equilibrium point of the system (4), we have
Define the Lyapunov function:
Applying Itô’s formula to the system (6), we have
where
Integrating on both sides of Eq. (15) and then taking expectation result in
Dividing Eq. (16) by t and letting \(t\rightarrow \infty \), we have
The proof of case (iii) is complete. By defining the Lyapunov functions \(V(S,I,Y)=S-K-K\ln \frac{S}{K}+I+\frac{1}{m}Y\) and \(V(S,I,Y)=S-\overline{S}-\overline{S}\ln \frac{S}{\overline{S}}+I-\overline{I}-\overline{I}\ln \frac{I}{\overline{I}}+\frac{1}{m}Y\), respectively, the proofs of cases (i) and (ii) are similar to case (iii), so we omit them here. \(\square \)
Notes. Theorem 3.4 shows that under different conditions, the solution of the stochastic predator–prey system can fluctuate (around the equilibrium of the ODEs system (4)) in different states, and the amplitude of the fluctuation is positively correlated with the intensity of stochastic noise. In particular, when the intensity of the noise is zero, i.e., \(\sigma _i=\gamma _i(u)=0~(i=1,2,3)\), we have
which indicates that the interior solution \(E_3(S^*,I^*,Y^*)\) of the ODEs model (4) is GAS provided that \(R_1>1\). Similarly, we can obtain that the boundary equilibrium \(E_1(K,0,0)\) is GAS provided that \(R_0=\frac{K\beta }{c}<1\), and the disease-free equilibrium \(E_2(\overline{S},\overline{I},0)\) is GAS provided that \(R_0>1\) and \(R_1<1\). Therefore, we generalised the global stability of the ODEs system (4).
4 Numerical Simulation
In this section, all simulations are carried out with ©Matlab2013b, the initial value is (2, 2, 3) and the numerical method is based on [15].
We show the extinction and persistence of the system (6). The simulations of the ODEs system (4) were also studied as a comparison. To proceed, we set \(\sigma _i=0.5,\gamma _i(u)=0.1,~i=1,2,3\), \( r=0.12, K=4, \beta =0.5, m=1, p=0.5, d=0.1, h=0.1, c=0.1,w=0.1.\) By straightforward calculation we obtain that:
and
By Theorem 3.3 (i), one can see that equilibrium \(E_3(0.3415,0.2195,0.0976)\) of system (4) is GAS, and the populations in the stochastic system (6) are die out. Figure 1a shows that the ODE system (4) admits a positive equilibrium, while Fig. 1b shows that stochastic solution of the predator and prey populations go to zero with probability one.

Next, we set \(\sigma _i=0.02,\gamma _i(u)=0.01,~i=1,2,3\), \(r=22, K=5, \beta =0.1, m=1, p=0.1, d=0.1, h=0.1, c=0.01,w=0.182.\) It follows that:
By Theorem 3.3 (ii), we know that the unique positive equilibrium \(E_3(4.9528,2.0755,1.0755)\) of (4) is GAS, and the populations in (6) are persistence in mean. Figure 2a shows that the ODE system (4) admits a positive equilibrium, while Fig. 2b shows that stochastic solution of the predator and prey populations fluctuates around the deterministic equilibrium point \(E_3\).

We now numerically illustrate the asymptotic dynamics of (6) with \(\sigma _i=0.3,~i=1,2,3, r=1,w=0.2.\) The other parameters are given by:
-
(1)
\(K=1,\beta =0.2,m=0.2,p=0.3,d=0.1,h=0.2,c=0.3,w=0.2\);
-
(2)
\(K=3,\beta =0.4,m=0.2,p=0.5,d=0.6,h=0.1,c=0.3,w=0.2\);
-
(3)
\(K=4,\beta =0.3,m=0.8,p=0.6,d=0.3,h=0.2,c=0.1,w=0.2\).
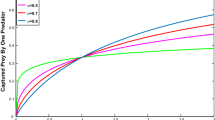
In case (1), by direct calculation we obtain that \(R_0=0.6667<1\), it follows that the ODEs model (4) admits a disease-free equilibrium \(E_1(K,0,0)=(1,0,0)\). To see the effects of noise on the stochastic system (6), we choose \(\gamma _i=0,0.2\) and 0.3 respectively, \(i=1,2,3\). By straightforward calculations we obtain that \(F_1(S,I,V)\le \frac{\delta _1}{\varTheta }=0.225,0.3134\) and 0.4132, respectively. Figure 3a shows that the ODEs system (4) admits a disease-free equilibrium \(E_1(K,0,0)=(1,0,0)\). Figure 3b, d describe that the level of the susceptible prey in the stochastic model vibrates around the solution of the ODEs model, while the infected prey and predator go to zero with probability one.

In case (2), by direct calculation we obtain that \(R_0=4>1,~R_1=0.2206<1\), it follows that the ODEs model (4) admits a boundary equilibrium \(E_2(\overline{S},\overline{I},0)=(1.4118,1.3235,0)\). To see the effects of noise on the stochastic system (6), we choose \(\gamma _i=0,0.1\) and 0.2 respectively, \(i=1,2,3\). By straightforward calculations we obtain that \(F_2(S,I,V)\le \frac{\delta _2}{\varTheta }=0.6154,0.6796\) and 0.8572, respectively. Figure 4a shows that the ODEs system (4) admits a boundary equilibrium \(E_2(\overline{S},\overline{I},0)=(1.4118,1.3235,0)\). Figure 4b–d show that stochastic solutions of the susceptible prey and infected prey fluctuate around the solution of the ODEs model, while the predator go to zero with probability one.


In case (3), by direct calculation we obtain that \(R_1=3.1429>1\), it follows that the ODEs model (4) admits a positive equilibrium \(E_3(S^*,I^*,Y^*)=(2.8,1,0.9)\). To see the effects of noise on the stochastic system (6), we choose \(\gamma _i=0,0.1\) and 0.2 respectively, \(i=1,2,3\). By straightforward calculations we obtain that \(F_3(S,I,V)\le \frac{\delta _3}{\varTheta }=0.7852,0.8671\) and 1.0937, respectively. Figure 5a shows that the ODEs system (4) admits a positive equilibrium \(E_3(S^*,I^*,Y^*)=(2.8,1,0.9)\). Figure 5b–d show that stochastic solutions of the predator and prey fluctuate around the deterministic equilibrium point.
Note that in Fig. 1a, b, all parameters are the same except for the intensity of stochastic noise. This indicates that high-intensity environmental disturbances can lead to the extinction of the population. In addition, Figs. 2, 3, 4 and 5 show that when the stochastic noise is sufficiently small, the environmental disturbance does not cause the extinction of the population, but causes the density of the population to oscillate within a certain small range. In summary, our results that: (i) High-intensity environmental disturbances may lead to population extinction; (ii) Small-intensity environmental disturbances may not cause population extinction, but will cause population size to fluctuate within a certain interval. And the amplitude of the fluctuation is positively correlated with the intensity of the environmental disturbance.
5 Discussion
This paper formulates a stochastic system to study the interactions between predator and prey populations. The model is incorporating the disease invasion and sudden catastrophic shocks. The globally unique positive solution is confirmed by using conventional methods. The stochastic uniform boundedness of the solution is obtained under certain conditions. Sufficient conditions for the persistence and extinction are given to measure the level of population size. Asymptotic dynamics of the solutions are carried out by two criteria parameters. The long-term dynamics of the solutions are demonstrated by numerical simulations. By comparing the stochastic system with the corresponding ODE system, we find that: (i) when the intensity of environmental disturbance is large enough, environmental disturbance may lead to the extinction of the population; (ii) when the intensity of environmental disturbances is small enough, environmental disturbances do not cause extinction of the population but cause the population to fluctuate around a certain level, and the amplitude of the fluctuations is proportional to the intensity of environmental disturbances. Our findings indicate that: (i) when the intensity of environmental disturbances is small, the impact of environmental disturbances on the population can be ignored, and the deterministic model can be used to estimate the dynamics of the population. However, when the intensity of environmental disturbance is large, the impact of environmental disturbance on the dynamics of the population cannot be ignored. Otherwise, the estimation result may be inaccurate.
Many researchers have made great efforts in studying the dynamics of population and infectious diseases [29, 30]. Notably, Lipsitch et al. [18] studied the transmission mechanism of a SIRS infectious disease, but the results they have obtained were somewhat different from the actual situation. One persuasive reason is that they ignored the effects of noise (such as earthquake, flood, drought, typhoon, tsunami). May [24] indicated that the predation rate, environmental accommodation, and other factors could be affected by environmental noise. The biosphere environment in which the population located is often highly stochastic, and stochastic noise is also the cause leading to the extinction of individuals. Hence the effects of noise cannot be ignored. Accordingly, we introduced the Lévy jump into the proposed model and studied the dynamics of the model where noise plays a crucial rule. Compared to the stochastic system driven by Brownian motion in Ref. [34], our system is driven simultaneously by Brownian motion and Poisson motion. Therefore, the model in Ref. [34] can be used to study the effects of small environmental disturbances (such as wind and rain) on population dynamics, and our model can be used to study the effects of small environmental disturbances on population dynamics, as well as to study large environmental disturbances (such as sudden volcanoes and floods) on population dynamics. Therefore, our theoretical analysis is much more complicated than the theoretical analysis in Ref. [34].
The system developed in this paper unifies much of the previous work. It encompasses the influential work of Xiao et al. [32] in understanding the asymptotic stability of the model with the disease in prey and the more recent work on the random disturbance in a predator–prey model [34]. The results may help for the further study of such systems with singular diffusion, indicating that the variables or parameters are subject to the same environmental noise.
References
Aguirre, P., González-Olivares, E., Torres, S.: Stochastic predator–prey model with allee effect on prey. Nonlinear Anal. Real World Appl. 14(1), 768–779 (2013)
Bao, J., Mao, X., Yin, G., Yuan, C.: Competitive Lotka–Volterra population dynamics with jumps. Nonlinear Anal. Theory, Methods Appl. 74(17), 6601–6616 (2011)
Baurmann, M., Gross, T., Feudel, U.: Instabilities in spatially extended predator–prey systems: spatio-temporal patterns in the neighborhood of turing-hopf bifurcations. J. Theor. Biol. 245(2), 220–229 (2007)
Cai, Y., Kang, Y., Banerjee, M., Wang, W.: A stochastic sirs epidemic model with infectious force under intervention strategies. J. Differ. Equ. 259(12), 7463–7502 (2015)
Chakraborty, S., Kooi, B.W., Biswas, B., Chattopadhyay, J.: Revealing the role of predator interference in a predator-prey system with disease in prey population. Ecol. Complex. 21, 100–111 (2015)
Chang, Z., Meng, X., Zhang, T.: A new way of investigating the asymptotic behaviour of a stochastic sis system with multiplicative noise. Appl. Math. Lett. 87, 80–86 (2019)
Du, N.H., Nguyen, D.H., Yin, G.G.: Conditions for permanence and ergodicity of certain stochastic predator–prey models. J. Appl. Probab. 53(1), 187–202 (2016)
Feng, T., Qiu, Z.: Global dynamics of deterministic and stochastic epidemic systems with nonmonotone incidence rate. Int. J. Biomath. 11(7), 1850101 (2018)
Feng, T., Qiu, Z., Meng, X.: Analysis of a stochastic recovery-relapse epidemic model with periodic parameters and media coverage. J. Appl. Anal. Comput. 9(3), 1022–1031 (2019)
Feng, T., Qiu, Z., Meng, X.: Dynamics of a stochastic hepatitis c virus system with host immunity. Discrete Contin. Dyn. Syst. Ser. B 24(12), 6367–6385 (2019)
Feng, T., Zhipeng, Q.: Global analysis of a stochastic TB model with vaccination and treatment. Discrete Contin. Dyn. Syst. Ser. B 24(6), 2923–2939 (2019)
Fulton, E.A., Smith, A.D., Johnson, C.R.: Mortality and predation in ecosystem models: is it important how these are expressed? Ecol. Model. 169(1), 157–178 (2003)
Haque, M., Sarwardi, S., Preston, S., Venturino, E.: Effect of delay in a Lotka–Volterra type predator-prey model with a transmissible disease in the predator species. Math. Biosci. 234(1), 47–57 (2011)
Hethcote, H.W., Wang, W., Han, L., Ma, Z.: A predator–prey model with infected prey. Theor. Popul. Biol. 66(3), 259–268 (2004)
Higham, D.J.: An algorithmic introduction to numerical simulation of stochastic differential equations. SIAM Rev. 43(3), 525–546 (2001)
Hilker, F.M., Schmitz, K.: Disease-induced stabilization of predator–prey oscillations. J. Theor. Biol. 255(3), 299–306 (2008)
Kooi, B.W., Venturino, E.: Ecoepidemic predator–prey model with feeding satiation, prey herd behavior and abandoned infected prey. Math. Biosci. 274, 58–72 (2016)
Lipsitch, M., Cohen, T., Cooper, B., Robins, J.M., Ma, S., James, L., Gopalakrishna, G., Chew, S.K., Tan, C.C., Samore, M.H., Fisman, D., Murray, M.: Transmission dynamics and control of severe acute respiratory syndrome. Science 300(5627), 1966–1970 (2003)
Liu, M., Bai, C., Jin, Y.: Population dynamical behavior of a two-predator one-prey stochastic model with time delay. Discrete Contin. Dyn. Syst. A 37(5), 2513–2538 (2017)
Liu, M., He, X., Yu, J.: Dynamics of a stochastic regime-switching predator–prey model with harvesting and distributed delays. Nonlinear Anal. Hybrid Syst. 28, 87–104 (2018)
Liu, M., Wang, K.: Stochastic Lotka–Volterra systems with Lévy noise. J. Math. Anal. Appl. 410(2), 750–763 (2014)
Liu, Q., Jiang, D., Hayat, T., Ahmad, B.: Stationary distribution and extinction of a stochastic predator–prey model with additional food and nonlinear perturbation. Appl. Math. Comput. 320, 226–239 (2018)
Liu, Q., Jiang, D., Hayat, T., Alsaedi, A.: Dynamics of a stochastic predator–prey model with stage structure for predator and holling type II functional response. J. Nonlinear Sci. 28(3), 1151–1187 (2018)
May, R.M.: Stability and Complexity in Model Ecosystems, vol. 6. Princeton University Press, Princeton (2001)
Meng, X., Li, F., Gao, S.: Global analysis and numerical simulations of a novel stochastic eco-epidemiological model with time delay. Appl. Math. Comput. 339, 701–726 (2018)
Numfor, E., Hilker, F.M., Lenhart, S.: Optimal culling and biocontrol in a predator–prey model. Bull. Math. Biol. 79(1), 88–116 (2017)
Rao, F., Castillo-Chavez, C., Kang, Y.: Dynamics of a diffusion reaction prey–predator model with delay in prey: effects of delay and spatial components. J. Math. Anal. Appl. 461(2), 1177–1214 (2018)
Sahoo, B., Poria, S.: Effects of additional food in a delayed predator–prey model. Math. Biosci. 261, 62–73 (2015)
Wang, W., Ma, W.: Travelling wave solutions for a nonlocal dispersal HIV infection dynamical model. J. Math. Anal. Appl. 457(1), 868–889 (2018)
Wang, W., Zhang, T.: Caspase-1-mediated pyroptosis of the predominance for driving CD4+ T cells death: a nonlocal spatial mathematical model. Bull. Math. Biol. 80(3), 540–582 (2018)
Wu, S., Shi, J., Wu, B.: Global existence of solutions and uniform persistence of a diffusive predator–prey model with prey-taxis. J. Differ. Equ. 260(7), 5847–5874 (2016)
Xiao, Y., Chen, L.: Analysis of a three species eco-epidemiological model. J. Math. Anal. Appl. 258(2), 733–754 (2001)
Yang, Q., Mao, X.: Extinction and recurrence of multi-group seir epidemic models with stochastic perturbations. Nonlinear Anal. Real World Appl. 14(3), 1434–1456 (2013)
Zhang, Q., Jiang, D., Liu, Z., O’Regan, D.: The long time behavior of a predator–prey model with disease in the prey by stochastic perturbation. Appl. Math. Comput. 245, 305–320 (2014)
Zhang, S., Meng, X., Feng, T., Zhang, T.: Dynamics analysis and numerical simulations of a stochastic non-autonomous predator–prey system with impulsive effects. Nonlinear Anal. Hybrid Syst. 26, 19–37 (2017)
Zhang, T., Xing, Y., Zang, H., Han, M.: Spatio-temporal dynamics of a reaction–diffusion system for a predator–prey model with hyperbolic mortality. Nonlinear Dyn. 78(1), 265–277 (2014)
Zhang, T., Zang, H.: Delay-induced turing instability in reaction–diffusion equations. Phys. Rev. E 90, 052908 (2014)
Acknowledgements
The authors would like to thank the editor and the reviewers for their valuable suggestions and comments, which greatly improve the quality of the paper.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
We declare that we have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was supported by the National Natural Science Foundation of China (11671206, 11971232), the Scholarship Foundation of China Scholarship Council (201806840120), the Fundamental Research Funds for the Central Universities (30918011339) and the Research Fund for the Taishan Scholar Project of Shandong Province of China and the SDUST Research Fund (2014TDJH102)
Rights and permissions
About this article

Cite this article
Feng, T., Meng, X., Zhang, T. et al. Analysis of the Predator–Prey Interactions: A Stochastic Model Incorporating Disease Invasion. Qual. Theory Dyn. Syst. 19, 55 (2020). https://doi.org/10.1007/s12346-020-00391-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12346-020-00391-4