
Abstract
Microfluidic technology has advantages in producing high-quality droplets with monodispersity which is promising in chemical engineering, biological medicine and so on. An in-depth study on the underlying mechanism of droplet formation in microfluidics is of great significance, and to understand it, numerical simulation is highly beneficial. This article reviews the substantial numerical methods used to study the fluid dynamics in microfluidic droplet formation, mainly including the continuum methods and mesoscale methods. Moreover, the principles of various methods and their applications in droplets formation in microfluidics have been thoroughly discussed, establishing the guidelines to further promote the numerical research in microfluidic droplet formation. The potential directions of numerical modelling for droplet formation in microfluidics are also given.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The droplets generated by traditional methods, such as high-speed stirring method, layer-by-layer assembly method, and membrane emulsification method, encounter great difficulties to meet the requirements of uniform size and precise control (Han and Chen 2021; Lee et al. 2016). Microfluidics has good prospects in the preparation of highly monodispersed droplets with good quality (Cybulski et al. 2019; Chen et al. 2014b; Morozov and Leshansky 2019; Chen et al. 2015b; Cao et al. 2009). It has been widely used in drug delivery (Fontana et al. 2016; Sattari et al. 2020), biological assays (Guo et al. 2012; Dressler et al. 2017), chemical synthesis (Kaminski and Garstecki 2017; Liu and Jiang 2017), fusion energy (Liu et al. 2014; Gao and Chen 2019) and medical diagnosis (Theberge et al. 2010; Agresti et al. 2010; KöSter et al. 2008). The droplet-based microfluidic technology refers to the method of generating droplets individually in tiny geometric structures (Wu et al. 2017; Rahimi et al. 2020; Hao et al. 2022). The interfacial tension and viscosity dominate the flow on a micro scale which is different from the conventional emulsification approaches (Woerner 2012; Yu et al. 2022). Precise control over the size of the droplets and their formation frequency can be achieved by implementing different microchannels, adjusting the flow rate, viscosity and interfacial tension ratio between the phases or by applying external force (Yu et al. 2021; Wang et al. 2022; Wei Gao 2020). Similar to the processes in microgravity environments, gravity is insignificant during the droplet formation through microfluidics. Microfluidic device can be regarded as an 'equivalent system' for the study of heat and mass transfer in microgravity environment (Malekzadeh and Roohi 2015; Galbiati and Andreini 1994). And the numerical methods reviewed in this work is also applicable in solving the problems in microgravity environments (Girard et al. 2006; Sheikholeslam Noori et al. 2020).
Generally, the experimental approaches are conventional methods for studying the droplet generation mechanisms (Yu et al. 2022; Chen et al. 2015a). However, experimental approaches have intrinsic limitations, such as the complex fabrication, measurement errors, as well as facting the difficulty while obtaining the detailed information on the fluid fields. Comparatively, computational fluid dynamics (CFD) has the advantages of low cost, simple operation, and strong repeatability, etc. Moreover, the detailed physical quantities during the droplet formation in the microchannels, such as local pressure, velocity and temperature, can be obtained through CFD (Santra et al. 2021; Chen et al. 2022). Hence, CFD plays an important role in developing the theoretical knowledge of multiphase flow (Wörner 2012). There are various kinds of numerical methods to simulate the multiphase flow. These methods can be generally classified into interface tracking method and interface capturing method that mainly differ from each other based on the meshes and interfaces. The computational meshes of interface tracking method fully or partly rely on the moving interface and are cut or reconnected with the development of the interfaces. On the contrary, the interface evolves through the meshes in the interface capturing methods. Hence, complicated meshing operation is usually not required. The interface capturing method is ideal for simulating the immiscible fluids (Han and Chen 2021).
This paper first reviews the mechanisms of droplet formation by passive and active microfluidic methods, then introduces the principles of continuum methods and mesoscale methods, including interface tracking method, interface capturing method, and lattice Boltzmann method. Numerical simulation on droplet generation by various methods is comprehensively reviewed. Finally, the recent advances and future scope of numerical simulation on droplet formation and of droplet dynamics in microfluidics are summarized.
Fundamentals of Microfluidic Droplet Formation Methods
Microfluidic technology exhibits superiority in high controllability, small volume, fast response speed, and low cost (Ding et al. 2019; Payne et al. 2020; Wang et al. 2020c). The droplet generation methods can generally be classified into two types: passive method and active method, according to whether the interface breakup is driven by external force (Han and Chen 2021; Amirifar et al. 2021; Manshadi et al. 2021). The external force is not required to produce droplets for passive methods, wherein the viscous force, inertial force, and buoyancy force are utilized to break the dispersed phase into droplets (Anna and Lynn 2016). The most applied configurations of microchannels in passive methods mainly include the T-junction (Liu et al. 2016), flow-focusing (Zhang et al. 2018; Yu et al. 2019a), co-flowing (Liu et al. 2017) and step emulsification (Liu et al. 2021). On the other hand, the active method, which relies on external energy to enlarge the area of the interface, are mainly the magnetic-driven (He et al. 2020), mechanical-driven (Zhu and Wang 2017), thermal-driven (Park et al. 2011), and electric-driven (Teo et al. 2020; Li and Zhang 2020), etc. Extra equipment, except the microfluidic chip, is required to generate the external fields. Table 1 summarizes the droplet formation methods and their salient features.
Passive Method of Droplet Formation
T-Junction Microchannel
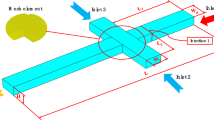
The structure of T-junction microchannel is shown in Fig. 1(a) (Thorsen et al. 2001). The dispersed phase (DP) flows perpendicularly towards the continuous phase (CP) and meets the continuous phase at the T-junction. Another class of T-junction is also demonstrated in Fig. 1(a) that the continuous phase is supplied from the perpendicular channel while the dispersed phase is supplied from the straight channel (Laborie et al. 2015). The pressure gradient in the continuous phase as well as the flow of the continuous phase result in the distortion of the interface until the interfacial tension becomes insufficient to maintain the stability (Garstecki et al. 2006). The dispersed phase breaks up, and thus droplets are generated. Thorsen et al. (2001) reported the mechanism of droplet formation in the T-junction microchannels and found that the size of the droplet formed have been inversely proportional to the shear force of the continuous phase. With a lower pressure difference between the continuous phase and the dispersed phase, the continuous droplets can be formed in the continuous phase. Whereas, the dispersed phase cannot flow out of the junction, with high-pressure continuous phase. Besides, when the pressure of the dispersed phase is too high, instead of forming droplets, the parallel flow with stable interface is formed. The double T-junction is used to generate the double emulsion droplet, as shown in Fig. 1(f).

Schematics of the passive microfluidic for droplet formation: single droplet: a T-junction b Co-flowing c Flow-focusing d Flow-focusing e Step emulsification, and double droplet: f T-junction g Co-flowing h Flow-focusing i Cross-junction (CP is the continuous phase, DP is the dispersed phase, SP is the shell phase)
Co-Flowing Microchannel
In the co-flowing microchannel, the continuous phase enters from the same side of the dispersed phase, surrounding and squeezing the dispersed phase, as illustrated in Fig. 1(b), (g). The droplets generation in the co-flowing microchannel is due to the fluctuation at the interface, namely Rayleigh-Plateau instability (Shahin and Mortazavi 2017; Deng et al. 2017; Zhang et al. 2021b). The interfacial tension suppresses the Rayleigh-Plateau instability, and hence the droplets can only be formed when the interface is elongated sufficiently in the continuous phase (Garstecki et al. 2005). The co-flowing microchannel was first reported by Cramer et al. (2004) by inserting the stainless steel capillary coaxially into another axisymmetric component. The experimental results showed that there are two flow regimes in the co-flowing microchannel: dripping and jetting, and the transition from dripping type to jetting type is dependent on the critical velocity.
Flow-Focusing Microchannel
Compared with the co-flowing microchannel, a nozzle-like structure, namely an orifice, is configured at downstream of inlets, as is shown in Fig. 1(c), (h), which produces a sudden change in pressure and induces a hydrodynamic focusing effect on the dispersed phase. The continuous phase squeezes the dispersed phase which is deformed into a long liquid thread while flowing through the orifice (Shi et al. 2014; Gupta et al. 2014). Eventually, the interface breaks into droplets under the effect of Rayleigh-Plateau instability (Utada et al. 2007; Yu et al. 2019b). Anna and Mayer (2006) constructed a planar flow-focusing microchannel by soft lithography and found that the diameter of droplets was significantly smaller than the width of the main channel. Therefore, compared with the co-flowing microfluidic device, by adjusting the structure of the orifice, the size of droplets generated in flow-focusing device can be further controlled. The quasi two-dimensional cross-junction devices (Fig. 1(d), (i)) are also regarded as flow-focusing devices (Sontti and Atta 2020; Du et al. 2016; Abate et al. 2011) since the decrease in the cross-section area of the outlet branch induce the hydrodynamic focusing effect as well.
Step Emulsification Microchannel
Step emulsification is a novel method that uses the Laplace pressure difference (Sugiura et al. 2001) to break the dispersed phase into droplets when it flows through the channel with a confinement gradient (Wang et al. 2018; Lian et al. 2019a). A typical step emulsification droplet maker (Kawakatsu et al. 1997; Ge et al. 2021; Li et al. 2015) is illustrated in Fig. 1(e). The significant advantage of step emulsification is that the volume fraction of the dispersed phase can be adjusted over a wide range, even up to 93% (Priest et al. 2006). By soft lithography, the scale up of the step emulsification can easily be achieved. For example, a parallelized microfluidic device is proposed by Dangla et al. (2013) using multiple-step emulsification droplet makers with the gradient of confinement in which the droplet formation originates from the Laplace pressure jump. According to Montessori et al. (2018), in addition to the pressure gradient of the dispersed phase fluid, interface fracture can also be attributed to the passive flow of the continuous phase and the inertia of the dispersed phase. Sugiura et al. (2000) found that the droplet size is insensitive to the flow rate of the dispersed phase in step-emulsification. The step-emulsification can also be configured in a tandem way to produces double emulsions (Fig. 1(j)) (Eggersdorfer et al. 2017; Ofner et al. 2019).
Active Method of Droplet Generation
Electric Field
Electrowetting On dielectric (EWOD) (Pollack et al. 2000; Lee et al. 2002) and Dielectrophoresis (DEP) method (Zhang et al. 2019) are two commonly used electric-driven droplet producing methods. In EWOD method, as shown in Fig. 2(a), the contact angle is modified by the electric field. A certain pressure difference is generated locally in the fluid, resulting in local deformation and instability of the interface. The droplets generated by the EWOD method are easily post-processed such as transported, mixed, and split. DEP method refers to the class of droplet formation caused by the migration of electrolyte fluid under the action of heterogeneous electric field. Similar to EWOD method, DEP method is also beneficial for the analysis of a single droplet attributed to the precise control of a single droplet by the electric field. Usually, electrode fabrication and integration, applied voltage and surface modification are required in electric-driven droplet generation, resulting in difficulties in chip fabrication and additional instruments compared to the passive droplet generation method as-mentioned above.

Schematics of the active microfluidic for droplet formation. a electric field; b magnetic field; c resistance heating; d laser local heating
Magnetic Field
The application of magnetic force in the formation and control of droplets mainly depends on the volumetric dynamic response of special fluid (magnetic fluid) to a magnetic field (Qiu et al. 2014). A magnetic fluid is a liquid containing the suspended magnetic particles, such as ferrofluid. Ferrofluids can be either water-based or oil-based, and can be used as both dispersed and continuous phases. The formation of droplets through magnetic force control in the microchannel is reported in T-junction (Tan et al. 2010) and flow-focusing device (Yan et al. 2015). The ferrofluid droplet generated under a square wave magnetic field is shown in Fig. 2(b). As the magnetic flux density increases, smaller droplets are generated.
Thermal Control
Energy sources of thermal controlled droplet formation and manipulation include the resistor heating at nodes and the local heating by focusing laser beam. The essence of thermal control methods is the dependence between the fluid properties and its temperature. The viscosity and interfacial tension of most fluids decrease with the increasing temperature and thus result in the dependence of capillary number with temperature. Nguyen et al. (2007) introduced resistance heating in a flow-focusing device as shown in Fig. 2(c). Both the droplet formation mode and droplet size can be controlled. With fluid temperatures ranging from 25 ℃ to 70 ℃, the diameter of the droplet can be more than twice its original size. Figure 2(d) shows that droplet formation process is controlled by locally heating the microchannel with a focused laser beam (Baroud et al. 2007).
Numerical Methods for Droplet Formation in Microfluidic
Depending on the length scales of the simulation in microfluidic system, the numerical methods can be classified into two groups, i.e. the continuum methods and mesoscale methods. The continuum methods, which are the traditional CFD methods, are based on the standard continuum assumption. The fluid is regarded as a continuum and follows the macroscopic conservation laws for mass, momentum and energy, e.g. the Navier–Stokes equation. The continuum methods performs well in the scale of tens or hundreds of micrometer. Based on the description of the interface evolution, the continuum methods can be classified into interface tracking method and interface capturing method. However, the continuum methods are difficult in dealing with the crucial microscopic interactions in the microfluidic system. The mesoscale methods, such as dissipative particle dynamics (DPD) (Miskin and Jaeger 2012) and the lattice Boltzmann method (LBM) (Zhang 2011), are relatively easier to incorporate intermolecular interactions in the microfluidic system. Since the DPD is seldomly used in the microfluidic system, only the LBM method and its application is introduced in this review.
Continuum Methods
Interface Tracking Method
The interface tracking method belongs to the class of Lagrangian methods, including the boundary integral method, finite element method, immersed boundary method and front tracking method. These methods track the movement of the interface directly through mark points, as shown in Fig. 3.

Interface tracking method
Boundary-Integral Method (BIM)
BIM has been proposed by Youngren and Acrivos in 1970s (Youngren and Acrivos 2006) which is often used to deal with low speed multiphase flow. The boundary integral method converts the Stokes equation and continuity equation into an integral equation on the boundary by introducing the basic solution of Stokes equation (Janssen and Anderson 2007; Navarro et al. 2020). The advantage is that it only discretizes the boundary rather than the whole computational region, reducing the dimension of the problem. The fundamental boundary integral equation (BIE) is written as:
where x0 is any point on the boundary SB within the region. The normal vector n points in the region. T is the stress tensor. The stress vector f acting on the interface is defined as f = σ·n, where σ is the symmetric stress tensor of the fluid.
Finite Element Method (FEM)
FEM is dated to Courant's work (Courant 1942) (different from BIM) in which the whole fluid region requires the spatial discretization. The whole computational region is decomposed into several subregions, and each subregion becomes a simple part called the finite element (Ω). The finite element helps minimize the error function and produces a stable solution by variational formulation (Salinas et al. 2017; Nathawani and Knepley 2022). Lebesgue function space L2(Ω) subspace is introduced to construct the Navier–Stokes equations as follows:
where q is a space integrable function at Ω. The position of the interface between phases is determined by integrating over every Ω, as shown in Fig. 4.

Finite element method
Immersed Boundary Method (IBM)
In 1977, Peskin (1972) introduced a discrete data structure in immersed boundary method to simulate the heart and surrounding blood flow. This data structure has been constantly updated to track the boundary. Its basic idea is to regard the fluid and the immersed structure as a whole system (Peskin 2002). As shown in Fig. 5, this method uses both Lagrangian and Euler grids, where the fixed Euler grids are applied on the whole region of the fluid, while the moving Lagrangian grids are applied on the immersed boundary. The boundary model is a force source f added to the Navier–Stokes equation as illustrated below:
where F is the unit force generated by the immersion boundary, X(s, t) represents the displacement of the immersion boundary, δ represents a Dirac delta function, and s is the curve coordinate associated with two-dimensional immersion boundary. In this method, the reaction of flow field to the boundary is achieved by interpolating the velocities of the surrounding fluid particles (Nangia et al. 2019; Xiao et al. 2020).

Immersed boundary method
Front Tracking Method (FTM)
The front-tracking method (FTM), developed by Prosperetti and Tryggvason (2009), uses a set of Lagrangian points connected to the interface (Bi et al. 2018). As shown in Fig. 6, one interface unit connects two marker points, and the convention is that points and interface units are stored in a linked list in counterclockwise order. In the process of moving the interface, the distance between the points on the interface can be controlled by adding or deleting points. Due to the interface being explicit and the position parameters of each point on the interface being known, the interfacial tension can be calculated at the interface and fixed into the grid (Shahin and Mortazavi 2020).

Front tracking method
Interface Capturing Method
The interface capturing method belongs to the Euler method, mainly including the volume of fluid (VOF) method, level set (LS) method, and phase filed (PF) method. It captures the motion of the interface implicitly according to the evolution of physical quantities that describe the interface, as shown in Fig. 7.

Interface tracking method
Volume of Fluid Method (VOF)
VOF method is the most commonly used interface capturing method. It was proposed by Hirt and Nichols (1981) in 1981, which introduces a phase function, namely volume fraction, to track each phase and employes a geometric reconstruction strategy to construct fluid interface based on the calculated volume fraction in each cell (Wörner 2012). In this method, all fluids share a single set of momentum equation and the volume fraction α as follows:
i is introduced as a variable to distinguish each fluid. In each cell, the volume fraction of all phases add up to 1.
Reconstruction of the interface by calculating the phase fraction of each cell in the whole computing domain is shown in Fig. 8. VOF method has been widely used for droplet generation (Rostami and Morini 2018), break up (Stone and Leal 1990), collision (Guido and Simeone 1998), and spiltting (Bedram and Moosavi 2011) in microfluidic systems.

Volume fraction spatial distribution and interface reconstruction
Level-Set (LS) Method
LS method was proposed by Osher and Sethian (1988) in 1988 which tracks the moving interfaces through Level Set functions. The main idea is to construct a continuous smooth LS function ψ of which the zero isosurface (ψ = 0) represents the phase interface, ψ > 0 represents non-target fluid, and ψ < 0 represents the target fluid (Fig. 9). LS method can accurately express the interface variables such as normal interface direction and curvature (Gibou et al. 2018; Saye and Sethian 2020). However, there is often a "mass loss" due to flow field distortion, and VOF methods are often coupled to overcome such problem.

Definition area map of Level Set function
LS function ψ can also be defined as a symbolic distance function, expressed as:
where d is the distance function, and Γ(t) is the position of the phase interface at time t.
Lan et al. (2015) improved the LS algorithm, embedding the modified governing equation to solve the "mass loss" problem. Based on the improved LS algorithm, single droplet formation in a co-flowing microchannel has been simulated, and classic emulsification regimes were reproduced.
Phase Field (PF) Method
The sharp-interface based numerical methods, i.e. VOF, LS, are unable to handle the rapid spatial change of the fluid interfaces at microscales (Larson 1999). As a diffuse-interface based method, the phase -field (PF) method, describes the interface with the thin and smooth transitional regions, and does not need to track the interface position (Bai et al. 2017; Wang et al. 2019). Hence, PF method can easily capture the complicated topological changes of the fluid interfaces and is regarded as a promising approach for multiphase flow problems in microfluidics (Aihara et al. 2019; Singer-Loginova and Singer 2008). The commonly used PF model for multiphase flow uses convection-diffusion equations, Cahn-Hilliard equation, and Allen-Cahn equation to manipulate the order parameter ϕ, which distinguishes one phase from other, as given below:
where \({M}_{\phi }\) is the mobility coefficient. The macroscopic quantities of the fluids are expressed as a function of ϕ.
Mesoscale Methods
Lattice Boltzmann method treats the fluid as a virtual particle resting on the lattice point. The migration and collision of these particles follow the certain rules. The particles can only move along the grid lines and can only move from one lattice point to its adjacent lattice in every time step. The evolution process of the particles can be divided into two stages: (1) In the pinch stage, the particle on each lattice meets and collides with the particle on the nearest lattice point, causing to change the velocity of the corresponding particle. (2) In the migration stage, the fluid particle moves to the adjacent lattice point with a new velocity after the collision. The lattice Boltzmann equation (Qing-Yu et al. 2017) can usually be written as
where ei is the dimensionless discrete velocity set, τ is the relaxation time, \({f}_{i}^{eq}(r,t)\) is the equilibrium density distribution function and Fi ( r, t) is an external force.
LBM provides an independent interfacial tension control, which improves the stability of the algorithm (Chen and Doolen 1998). The interaction between fluids is simple to describe, and the complex boundary is easy to set (Petersen and Brinkerhoff 2021; Chen et al. 2014a). For these reasons, it is suitable for solving the incompressible flows. The computational efficiency is relatively low compared with other algorithms, so the coupling with other methods is an excellent way to improve the computational efficiency and retain the simulation accuracy (Li et al. 2016). There are several approaches for the multiphase flow simulation via LBM, including Shan-Chen model (Shan and Chen 1993), color gradient model (Ba et al. 2016), free-energy-based model (Shao et al. 2014), and the phase-field-based model (Wang et al. 2019).
Applications of Numerical Methods in Droplet Formation of Microfluidics
Recently, droplet formation in microfluidics has been extensively investigated via several simulation methods (Wang et al. 2020a). The representative applications of numerical methods in droplet formation are summarized in this section.
Droplet Formation Via Passive Methods
The droplet formation processes in passive microfluidic devices have been comprehensively investigated via numerical methods. Table 2 summarizes the popular numerical methods and various channel types of passive microfluidic devices. The underlying mechanisms of the droplet formation modes, i.e., dripping, jetting and tip streaming etc., in passive microfluidic have been investigated.
Both two-dimensional (Shi et al. 2014; Hoseinpour and Sarreshtehdari 2020; Chakraborty et al. 2019) and three-dimensianl (Yin and Kuhn 2022; Gupta et al. 2009) numerical models have been successfully employed, demonstrating the generation of droplet via T-junction microchannels (Lu et al. 2022; Azarmanesh et al. 2015; Li et al. 2012; Wang et al. 2014). The squeezing regime, transition regime, dripping regime, jetting regime and parallel flow regime of droplet formation in T-junction are show in Fig. 10 (Yan et al. 2012). To further examine the dynamics, by integrating the dynamic contact angle model into into VOF solver, the prediction accuracy of droplet formation in microfluidic T-junction is significantly increased (Yin and Kuhn 2022). Compared with the receding contact angle, the advancing contact angle affects the droplet formation more strongly. The dynamic contact angle of the droplet with high viscosity fluid is higher than that of low viscosity fluid (Kumar and Pathak 2022b). Increasing the slip length of the continuous phase liquid leads to the enhancement of the vorticity inside the droplet, resulting in the resistance of the droplet detachment and the increased droplet length (Kumar and Pathak 2022a). Using the LBM to study the droplet generation in the T-junction microchannel, it is found that the transition of flow patterns occurs with increasing capillary number (Yang et al. 2013) and the droplet decreases with the increasing Capillary number in the squeezing regime (Gupta and Kumar 2010). Different droplet flow patterns, including the squeezing, dripping, and jetting, can be obtained by varying the flow rates (Lu et al. 2022). Newtonian droplet formation in shear-thinning fluid in T-junction has been studied by Sontti and Atta (2017). The flow rate, interface tension, and power-law index have been examined. The numerical results predicted the effect of interfacial tension on droplet size and the variation of droplet length with different power-law index and the flow rate of the continuous phase. Using the LS method, the droplet formation of sodium carboxymethylcellulose (SCMC) polymer in a T-junction channel is simulated and found that the droplet formation frequency decreased with the polymer concentration (Wong et al. 2017). Based on a PF model, the liquid metal droplet formation is found to be affected by the wettability of liquid metal on the surface of the metallic needle in a co-flowing device, as the movement of the liquid metal droplet benefits from the larger contact angle (Hu et al. 2020).

Flow regime of droplet formation in T-junction: a squeezing, b transition, c dripping, d jetting and e parallel flow (Yan et al. 2012)
The flow regimes of droplet formation in co-flowing device have been successfully predicted (Deng et al. 2017; Rostami and Rahmani 2022; Zhang et al. 2021b; Sattari and Hanafizadeh 2020; 2021; Vu et al. 2013), as shown in Fig. 11. Chen et al., using VOF method, reported the dripping, widening jetting, and narrow jetting regimes in single emulsion droplet formation. They also found that the dripping regime is a favorable way to produce monodisperse droplets, rather than the jetting regime (Chen et al. 2013). For the dripping regime of droplet formation in a different-sized devices, Deng et al. developed a correlation of dimensionless droplet diameter with the Capillary number and Reynolds number (Deng et al. 2017). Using FTM, the droplet formation of the dripping regime in co-flowing microchannel was studied, and the droplet in elliptic jet is smaller thant that in circular jet (Shahin and Mortazavi 2020). Droplet formation in co-flowing and flow-focusing microfluidic devices has been compared by Wu et al. (2017), based on VOF method, and the effects of local geometry on droplet generation frequency, size, and monodispersity have been thoroughly discussed. The strong hydrodynamic focusing effect due to the existence of focusing orifice, makes the dripping-jetting transition regime occur at a smaller Capillary number and droplets smaller in flow-focusing microfluidics. Using the LS method, the influence of wall wettability of microchannels during droplet formation in device is studied and the competition for wettability between two-phase flows is found to leads to unstable flow patterns that disrupt the normal droplet formation (Bashir et al. 2011).

The flow-focusing device is attracting the attention across the globe, particularly based on the potential in high-throughput production of monodisperse droplets (Ong et al. 2007; Peng et al. 2011; Mu et al. 2018; Rahimi et al. 2020; Hernández-Cid et al. 2022; Chen et al. 2015c). The detailed underlying hydrodynamic mechanism of typical drop formation modes, including the dripping, jetting, and dripping-jetting transition, are reported (Wu et al. 2017), shown in Fig. 12. Using VOF method, Yu et al. investigated the hydrodynamic behaviors of the dripping, jetting, and threading regime for the triple emulsion droplet generation (Yu et al. 2021). The effects of local geometries and flow rates on droplet formation have been discussed (Liu et al. 2017; Wu et al. 2017; Rahimi et al. 2019; Soroor et al. 2021). For the microfluidic cross-junctions, the hydrodynamic characteristics around the cross-junction region are affected by the junction angle (Yu et al. 2019b). To predict the size of the droplets generated in the microfluidic cross-junction, the scaling correlation is obtained (Yu et al. 2019b). The viscosity ratio and interfacial tension ratio are found to play essential role in the morphologies of droplets (Wang et al. 2020b; Sontti and Atta 2020). Using finitely extensible nonlinear elastic-Chilcott-Rallison model, the viscoelastic droplet formation in an axisymmetric flow-focusing device are discussed by Nooranidoost et al. (2016). The droplet size was found to be dependent on the capillary number (Long et al. 2008). Gupta et al. (2014) also studied the influence of orifice on droplet size in a flow-focusing microfluidic system and found that the droplet size does not vary linearly with the length of the orifice.

Due to the fundamentals and structure of the step-emulsification device, the three-dimensional simulation of droplet formation via step-emulsification is preferred. Using LB immiscible multicomponent model, Montessori et al. elucidate two essential mechanisms of droplet formation in step-emulsification via three-dimensional time-dependent direct simulations (Montessori et al. 2018, 2019). Eggersdorfer et al. predict the droplet generation mode transition as a function of the contact angle during step emulsification (Eggersdorfer et al. 2018). To reduce the computational cost, Chakraborty et al. developed an axisymmetric model to simulate the droplet formation in a microfluidic step-emulsifier (Chakraborty et al. 2017). Clime et al. designed a buoyancy-driven device and discussed the hydrodynamic behavior of the droplet formation (Clime et al. 2020). Lian et al. simulate the effects of interfacial tension, viscosity, and flow velocities on droplet formation in co-flowing step emulsification device using VOF method (Lian et al. 2019a, b, 2021). As the continuous phase velocity and the dispersed phase velocity increase, the driving mechanism transits from co-flowing to Laplace pressure difference. Van der Zwan (2009) simulated the droplet generation in the step emulsification device and proved the accuracy of LBM.
Droplet Formation Via Active Methods
Recently, substantial numerical investigations have been carried out to study the droplet formation under external fields, i.e., electric field, magnetic field, etc. Table 3 summarizes the application of numerical methods in droplet formation via active method.
Compared with experimental studies, simulation provides a powerful means to quantitatively investigate the influence of the external electric force on the interface evolution during the droplet formation (Mohammadi et al. 2019; Sunder and Tomar 2016; Notz and Basaran 1999). LBM with intermolecular potential model or the leaky dielectric model can be used to simulate the droplet formation process under the imposed electric field (Gong et al. 2010; Liu et al. 2022). The electric-field-inducing Maxwell stress leads to the oscillation of interfaces, promoting the breakup of the dispersed phase (Yin et al. 2020). Relatively smaller-sized droplets can be produced by applying electric field (Singh et al. 2020). Li and Zhang studied the electro-hydrodynamics of electric controlled droplet generation in co-flowing device, by coupling PF method and electrostatic model (Li and Zhang 2020). The liquid cone-jet and core–shell droplet formation are investigated by VOF method (Yan et al. 2016). The formation of shear-thinning fluid droplets in T-junction under electric field have been analyzed using LS method (Amiri et al. 2021).
The magnetic field is usually utilized for the formation of ferrofluid droplet in microfluidic device (Varma et al. 2016; Gómez-Pastora et al. 2019). The multiscale modeling with two assumed computational domains is demonstrated by Bijarchi et al., to study the formation of ferrofluid droplets under a nonuniform magnetic field (Bijarchi et al. 2022). Only magnetic equations are solved to obtain the distribution of magnetic field in large computational domain. The coupling LS-VOF method is used to predict the formation of ferrofluid droplet in the small computational domain. Meanwhile, by solving the magnetic equation in the small computational domain, the magnetic force acting on the droplet is obtained. A three-dimensional model is developed by Liu et al. to simulate the ferrofluid droplet genenration with a magnetic field in a flow-focusing microchannel (Liu et al. 2011a, b). The Maxwell equations are used to describe the magnetic field for ferrofluid. With a higher magnetic bond number, a bigger droplet is generated. Roodan et al. analyze the ferrofluid droplet formation in cross-junction with magnetic fields (Amiri Roodan et al. 2020). VOF method is used to study the interaface evolution and the magnetization of a ferrofluid is governed by a Langevin function.
Moreover, several attempts have been made to numerically study the droplet formation under some other external fields. Jiang et al. studied the influence of temperature on droplet formation process in a flow-focusing device with CLSVOF method (Jiang et al. 2019). With increasing dispersed phase temperature, larger droplet is generated. The underlying mechanism of droplet formation regimes with different fluid temperatures are discussed. The effect of the thermocapillary on the droplet formation in a microfluidic T-junction is numerically studied by Gupta et al. (2016). With a negative temperature gradient, the squeezing process is restricted by the thermocapillary effects, leading to larger droplet sizes. With a positive temperature gradient, the thermocapillary stresses promote the droplet breakup. Mu et al. discussed the effect of external perturbations on the droplet formation in a flow-focusing device (Mu et al. 2018). The sinusoidal perturbation would be more suitable for forming uniform droplets compared with the square perturbation.
Conclusion and Prospects
The development of microfluidic technology provides an effective way for the miniaturization and refinement of processes in chemical engineering, biomedical engineering, energy engineering and so on. Other than the experimental methods, the numerical methods provide new approaches to explore the dynamics of droplets at micro-scale. However, as the structure of the microchannel becomes more complex, the complexity of multiphase flow and the interaction of multiphase flow in the microchannel need to be coupled where the simulation faces the challenges. In droplet formation simulation, selecting the appropriate methods is essential to maintain accuracy and efficiency. In this review, we summarize the progress in numerical modelling for the droplets formation in microfluidics, Including the geomerrty microfluidic device for droplet formation, the numerical methdos for droplet formation in microfluidics and the application of these methods in the simulation of droplet formation in microfluidics. An overview of the numerical methods and the microfluidic device geometry for droplet formation via passive methods and active methods are provided in Tables 2 and 3, respectively. However, this review is disscussed from a practical point of view, and the theoretical aspects of the numerical methods are not addressed in details.
Although numerical modelling for droplet formation in microfluidics have undergone considerable developments in theory and application, there remain challenges in improving the accuracy and computation cost of numerical simulation. Herein, the potential directions for numerical modelling for droplet formation in microfluidics are given as follows:
-
1.
Complex interfacial phenomenon during droplet formation. The effect of mass transfer and chemical reactions across the interface in not considered in most researches on the droplet formation in microfluidics, e.g. droplet formation in surfactant-laden system and droplet formation cantaining nanoparticles (Zhang et al. 2022). However, it may affect the flows around the interface and complicates the mechanism of the interfacial phenomenon during droplet formation. Therefore, it is essential to develop special numerical treatment method of the complex interface.
-
2.
Droplet formation in complex multiphase system. The current studies mostly focus on the droplet formation in liquid-liquid system or gas-liquid system. However, there are less studies on the droplet formation in a more complex multiphase system, like the solid-liquid double emulsion droplet formation. The simulation of this complex multiphase system requires the coupling of several numerical methods for multiphase flow, like LBM-Immersed Boundary Method (IBM)-discrete element method (DEM) coupled method.
-
3.
Multiphysics-field-assisted droplet formation. Even though there are several investgations on the droplet formation via active methods, the underlying mechanism is still not fully revealed and the practical guideline should be improved. Some studies can only reconstruct partially the dynamics of interface evolution in multiphysics fields. More efforts should be addressed to the development of models that represent the complex characteristics of real fluids in multiphysical fields.
Despite recent significant achievements of numerical modelling for droplet formation in microfluidics, researchers still need to find optimized models to better describe the more complex multiphase system and reveal the underlying mechanism of the droplet formation in microfluidics with multiphyscis field. This review is hopeful to provide a tutorial for numerical modelling for droplet formation in microfluidics.
Availability of data and material
All data generated or analysed during this study are included in this published article.
References
Abate, A.R., Thiele, J., Weitz, D.A.: One-step formation of multiple emulsions in microfluidics. Lab Chip 11(2), 253–258 (2011). https://doi.org/10.1039/C0LC00236D
Agresti, J.J., Antipov, E., Abate, A.R., Ahn, K., Rowat, A.C., Baret, J.C., Marquez, M., Klibanov, A.M., Griffiths, A.D., Weitz, D.A.: Ultrahigh-throughput screening in drop-based microfluidics for directed evolution. Proc. Natl. Acad. Sci. U.S.A. 107(9), 4004–4009 (2010)
Aihara, S., Takaki, T., Takada, N.: Multi-phase-field modeling using a conservative Allen-Cahn equation for multiphase flow. Comput. Fluids 178, 141–151 (2019). https://doi.org/10.1016/j.compfluid.2018.08.023
Amiri, N., Honarmand, M., Dizani, M., Moosavi, A., Kazemzadeh Hannani, S.: Shear-thinning droplet formation inside a microfluidic T-junction under an electric field. Acta Mech. 232(7), 2535–2554 (2021). https://doi.org/10.1007/s00707-021-02965-y
Amiri Roodan, V., Gómez-Pastora, J., Karampelas, I.H., González-Fernández, C., Bringas, E., Ortiz, I., Chalmers, J.J., Furlani, E.P., Swihart, M.T.: Formation and manipulation of ferrofluid droplets with magnetic fields in a microdevice: a numerical parametric study. Soft Matter 16(41), 9506–9518 (2020). https://doi.org/10.1039/D0SM01426E
Amirifar, L., Besanjideh, M., Nasiri, R., Shamloo, A., Nasrollahi, F., de Barros, N.R., Davoodi, E., Erdem, A., Mahmoodi, M., Hosseini, V.: Droplet-based microfluidics in biomedical applications. Biofabrication 14(2), 022001 (2021)
Anna, Lynn, S.: Droplets and Bubbles in Microfluidic Devices. Annu. Rev. Fluid Mech. 48(1), 285–309 (2016)
Anna, S.L., Mayer, H.C.: Microscale tipstreaming in a microfluidic flow focusing device. Phys. Fluids 18(12), 364 (2006)
Azarmanesh, M., Farhadi, M., Azizian, P.: Simulation of the double emulsion formation through a hierarchical T-junction microchannel. Int. J. Numer. Meth. Heat Fluid Flow 25(7), 1705–1717 (2015). https://doi.org/10.1108/HFF-09-2014-0294
Ba, Y., Liu, H., Li, Q., Kang, Q., Sun, J.: Multiple-relaxation-time color-gradient lattice Boltzmann model for simulating two-phase flows with high density ratio. Phys. Rev. E 94(2), 023310 (2016)
Bai, F., He, X., Yang, X., Zhou, R., Wang, C.: Three dimensional phase-field investigation of droplet formation in microfluidic flow focusing devices with experimental validation. Int. J. Multiphase Flow 93, 130–141 (2017). https://doi.org/10.1016/j.ijmultiphaseflow.2017.04.008
Baroud, C.N., Delville, J.P., Gallaire, F., Wunenburger, R.: Thermocapillary valve for droplet production and sorting. PhRvE 75(4), 46302–46302 (2007)
Bashir, S., Rees, J.M., Zimmerman, W.B.: Simulations of microfluidic droplet formation using the two-phase level set method. Chem. Eng. Sci. 66(20), 4733–4741 (2011)
Bedram, A., Moosavi, A.: Droplet breakup in an asymmetric microfluidic T junction. Eur. Phys. J. E 34(8), 78–70 (2011)
Besanjideh, M., Shamloo, A., Hannani, S.K.: Enhanced oil-in-water droplet generation in a T-junction microchannel using water-based nanofluids with shear-thinning behavior: A numerical study. Phys. Fluids 33(1), 012007 (2021). https://doi.org/10.1063/5.0030676
Bi, D.-A.K., Tavares, M., Chénier, É., Vincent, S.: A review of geometrical interface properties for 3D Front-Tracking methods. Turbulence and Interactions 144–149 (2018)
Bijarchi, M.A., Yaghoobi, M., Favakeh, A., Shafii, M.B.: On-demand ferrofluid droplet formation with non-linear magnetic permeability in the presence of high non-uniform magnetic fields. Sci. Rep. 12(1), 10868 (2022). https://doi.org/10.1038/s41598-022-14624-w
Cao, J., Cheng, P., Hong, F.: Applications of electrohydrodynamics and Joule heating effects in microfluidic chips: A review. Sci. China Ser. E Technol. Sci. 52(12), 3477 (2009). https://doi.org/10.1007/s11431-009-0313-z
Chakraborty, I., Ricouvier, J., Yazhgur, P., Tabeling, P., Leshansky, A.M.: Microfluidic step-emulsification in axisymmetric geometry. Lab Chip 17(21), 3609–3620 (2017). https://doi.org/10.1039/C7LC00755H
Chakraborty, I., Ricouvier, J., Yazhgur, P., Tabeling, P., Leshansky, A.M.: Droplet generation at Hele-Shaw microfluidic T-junction. Phys. Fluids 31(2), 022010 (2019). https://doi.org/10.1063/1.5086808
Chen, L., Kang, Q., Mu, Y., He, Y.-L., Tao, W.-Q.: A critical review of the pseudopotential multiphase lattice Boltzmann model: Methods and applications. Int. J. Heat Mass Transfer 76, 210–236 (2014a)
Chen, P.-C., Wu, M.-H., Wang, Y.-N.: Microchannel geometry design for rapid and uniform reagent distribution. Microfluid. Nanofluid. 17(2), 275–285 (2014b)
Chen, Q., Li, J., Song, Y., Christopher, D.M., Li, X.: Modeling of Newtonian droplet formation in power-law non-Newtonian fluids in a flow-focusing device. Heat Mass Transfer 56(9), 2711–2723 (2020). https://doi.org/10.1007/s00231-020-02899-6
Chen, S., Doolen, G.D.: Lattice Boltzmann method for fluid flows. Annu. Rev. Fluid Mech. 30, 329–364 (1998)
Chen, W.-C., Fan, Y.-W., Zhang, L.-L., Sun, B.-C., Luo, Y., Zou, H.-K., Chu, G.-W., Chen, J.-F.: Computational fluid dynamic simulation of gas-liquid flow in rotating packed bed: A review. Chinese J. Chem. Eng. 41, 85–108 (2022). https://doi.org/10.1016/j.cjche.2021.09.024
Chen, Y., Liu, X., Zhang, C., Zhao, Y.: Enhancing and suppressing effects of an inner droplet on deformation of a double emulsion droplet under shear. Lab Chip 15(5), 1255–1261 (2015a). https://doi.org/10.1039/C4LC01231C
Chen, Y., Liu, X., Zhao, Y.: Deformation dynamics of double emulsion droplet under shear. Appl. Phys. Lett. 106(14), 141601 (2015b)
Chen, Y., Wu, L., Zhang, C.: Emulsion droplet formation in coflowing liquid streams. PhRvE 87(1), 013002 (2013). https://doi.org/10.1103/PhysRevE.87.013002
Chen, Y., Wu, L., Zhang, L.: Dynamic behaviors of double emulsion formation in a flow-focusing device. Int. J. Heat Mass Transfer 82, 42–50 (2015c)
Chung, C., Hulsen, M.A., Ju, M.K., Ahn, K.H., Lee, S.J.: Numerical study on the effect of viscoelasticity on drop deformation in simple shear and 5:1:5 planar contraction/expansion microchannel. J. Nonnewton. Fluid Mech. 155(1–2), 80–93 (2008)
Chung, C., Ju, M.K., Hulsen, M.A., Ahn, H., Lee, S.J.: Effect of viscoelasticity on drop dynamics in 5: 1: 5 contraction/expansion microchannel flow. Chem. Eng. Sci. 64(22), 4515–4524 (2009)
Clime, L., Malic, L., Daoud, J., Lukic, L., Geissler, M., Veres, T.: Buoyancy-driven step emulsification on pneumatic centrifugal microfluidic platforms. Lab Chip 20(17), 3091–3095 (2020). https://doi.org/10.1039/D0LC00333F
Courant, R.: Variational Methods for the Solution of Problems of Equilibrium and Vibrations. TAMS 49(1) (1942)
Cramer, C., Fischer, P., Windhab, E.J.: Drop formation in a co-flowing ambient fluid. Chem. Eng. Sci. 59(15), 3045–3058 (2004). https://doi.org/10.1016/j.ces.2004.04.006
Cybulski, O., Garstecki, P., Grzybowski, B.A.: Oscillating droplet trains in microfluidic networks and their suppression in blood flow. Nat. Phys. (2019)
Dangla, R., Fradet, E., Lopez, Y., Baroud, C.N.: The physical mechanisms of step emulsification. J. Phys. D Appl. Phys. 46(11), 114003 (2013)
Deng, C.J., Wang, H.Y., Huang, W.X., Cheng, S.M.: Numerical and experimental study of oil-in-water (O/W) droplet formation in a co-flowing capillary device. Colloids Surf. 533, 1–8 (2017). https://doi.org/10.1016/j.colsurfa.2017.05.041
Ding, Y., Howes, P.D., deMello, A.J.: Recent advances in droplet microfluidics. Anal. Chem. 92(1), 132–149 (2019)
Dressler, O.J., Casadevall i Solvas, X., DeMello, A.J.: Chemical and biological dynamics using droplet-based microfluidics. Annu. Rev. Anal. Chem. 10, 1–24 (2017)
Du, W., Fu, T., Zhu, C., Ma, Y., Li, H.Z.: Breakup dynamics for high-viscosity droplet formation in a flow-focusing device: Symmetrical and asymmetrical ruptures. AIChE J. 62(1), 325–337 (2016). https://doi.org/10.1002/aic.15043
Eggersdorfer, M.L., Seybold, H., Ofner, A., Weitz, D.A., Studart, A.R.: Wetting controls of droplet formation in step emulsification. Proc. Natl. Acad. Sci. 115(38), 9479–9484 (2018)
Eggersdorfer, M.L., Zheng, W., Nawar, S., Mercandetti, C., Ofner, A., Leibacher, I., Koehler, S., Weitz, D.A.: Tandem emulsification for high-throughput production of double emulsions. Lab Chip 17(5), 936–942 (2017). https://doi.org/10.1039/C6LC01553K
Fontana, F., Ferreira, M.P., Correia, A., Hirvonen, J., Santos, H.A.: Microfluidics as a cutting-edge technique for drug delivery applications. J. Drug Deliv. Sci. Technol. 34, 76–87 (2016)
Gómez-Pastora, J., Amiri Roodan, V., Karampelas, I.H., Alorabi, A.Q., Tarn, M.D., Iles, A., Bringas, E., Paunov, V.N., Pamme, N., Furlani, E.P., Ortiz, I.: Two-Step Numerical Approach To Predict Ferrofluid Droplet Generation and Manipulation inside Multilaminar Flow Chambers. J. Phys. Chem. C 123(15), 10065–10080 (2019). https://doi.org/10.1021/acs.jpcc.9b01393
Galbiati, L., Andreini, P.: Flow pattern transition for horizontal air-water flow in capillary tubes. A microgravity “equivalent system” simulation. Int. Commun. Heat Mass Transf. 21(4), 461–468 (1994). https://doi.org/10.1016/0735-1933(94)90045-0
Gao, W., Chen, Y.: Microencapsulation of solid cores to prepare double emulsion droplets by microfluidics. Int. Commun. Heat Mass Transf. 135, 158–163 (2019). https://doi.org/10.1016/j.ijheatmasstransfer.2019.01.136
Garstecki, P., Fuerstman, M.J., Stone, H.A., Whitesides, G.M.: Formation of droplets and bubbles in a microfluidic T-junction-scaling and mechanism of break-up. Lab Chip 6(3), 437–446 (2006)
Garstecki, P., Stone, H.A., Whitesides, G.M.: Mechanism for Flow-Rate Controlled Breakup in Confined Geometries: A Route to Monodisperse Emulsions. Phys. Rev. Lett. 94(16), 164501 (2005)
Ge, X., Rubinstein, B.Y., He, Y., Bruce, F., Li, Z.: Double Emulsion with Ultrathin Shell by Microfluidic Step-Emulsification. Lab Chip 21(8), 1613–1622 (2021)
Ghaderi, A., Kayhani, M.H., Nazari, M., Fallah, K.: Drop formation of ferrofluid at co-flowing microcahnnel under uniform magnetic field. Eur. J. Mech. B Fluids. 67, 87–96 (2018). https://doi.org/10.1016/j.euromechflu.2017.08.010
Gibou, F., Fedkiw, R., Osher, S.: A review of level-set methods and some recent applications. J. Comput. Phys. 353, 82–109 (2018)
Girard, F., Antoni, M., Steinchen, A., Faure, S.: Numerical study of the evaporating dynamics of a sessile water droplet. Microgravity Sci. Technol. 18(3), 42–46 (2006). https://doi.org/10.1007/BF02870377
Gong, S., Cheng, P., Quan, X.: Lattice Boltzmann simulation of droplet formation in microchannels under an electric field. Int. J. Heat Mass Transfer 53(25), 5863–5870 (2010). https://doi.org/10.1016/j.ijheatmasstransfer.2010.07.057
Guido, S., Simeone, M.: Binary collision of drops in simple shear flow by computer-assisted video optical microscopy. J. Fluid Mech. 357, 1–20 (1998)
Guo, M.T., Rotem, A., Heyman, J.A., Weitz, D.A.: Droplet microfluidics for high-throughput biological assays. Lab. Chip. 12(12), 2146–2155 (2012)
Gupta, A., Kumar, R.: Effect of geometry on droplet formation in the squeezing regime in a microfluidic T-junction. Microfluid. Nanofluid. 8(6), 799–812 (2010)
Gupta, A., Matharoo, H.S., Makkar, D., Kumar, R.: Droplet formation via squeezing mechanism in a microfluidic flow-focusing device. Comput. Fluids 100, 218–226 (2014)
Gupta, A., Murshed, S.M.S., Kumar, R.: Droplet formation and stability of flows in a microfluidic T-junction. Appl. Phys. Lett. 94(16), 164107 (2009). https://doi.org/10.1063/1.3116089
Gupta, A., Sbragaglia, M., Belardinelli, D., Sugiyama, K.: Lattice Boltzmann simulations of droplet formation in confined channels with thermocapillary flows. PhRvE 94(6), 063302 (2016). https://doi.org/10.1103/PhysRevE.94.063302
Han, W., Chen, X.: A review on microdroplet generation in microfluidics. J. Braz. Soc. Mech. Sci. Eng. 43(5), 247 (2021)
Hao, G., Li, L., Wu, L., Yao, F.: Electric-field-controlled Droplet Sorting in a Bifurcating Channel. Microgravity Sci. Technol. 34(2), 25 (2022). https://doi.org/10.1007/s12217-022-09944-5
He, X., Wu, J., Hu, T., Xuan, S., Gong, X.: A 3D-printed coaxial microfluidic device approach for generating magnetic liquid metal droplets with large size controllability. Microfluid. Nanofluid. 24(4), 1–14 (2020)
Hernández-Cid, D., Pérez-González, V.H., Gallo-Villanueva, R.C., González-Valdez, J., Mata-Gómez, M.A.: Modeling droplet formation in microfluidic flow-focusing devices using the two-phases level set method. Mater. Today Proc. 48, 30–40 (2022). https://doi.org/10.1016/j.matpr.2020.09.417
Hirt, C.W., Nichols, B.D.: Volume of fluid (vof) method for the dynamics of free boundaries. J. Comput. Phys. 39(1), 201–225 (1981). https://doi.org/10.1016/0021-9991(81)90145-5
Homma, S., Moriguchi, K., Kim, T., Koga, J.: Computations of Compound Droplet Formation from a Co-axial Dual Nozzle by a Three-Fluid Front-Tracking Method. J. Chem. Eng. Jpn. 47(2), 195–200 (2014)
Hoseinpour, B., Sarreshtehdari, A.: Lattice Boltzmann simulation of droplets manipulation generated in lab-on-chip (LOC) microfluidic T-junction. J. Mol. Liq. 297, 111736 (2020). https://doi.org/10.1016/j.molliq.2019.111736
Hu, Q., Jiang, T., Jiang, H.: Numerical Simulation and Experimental Validation of Liquid Metal Droplet Formation in a Co-Flowing Capillary Microfluidic Device. Micromachines 11(2), 169 (2020)
Janssen, P., Anderson, P.: Boundary-integral method for drop deformation between parallel plates. Phys. Fluids 19(4), 043602 (2007)
Jiang, F., Xu, Y., Song, J., Lu, H.: Numerical study on the effect of temperature on droplet formation inside the microfluidic chip. J. Appl. Fluid Mech. 12(3), 831–843 (2019)
KöSter, S., Angilè, F., Duan, H., Agresti, J.J., Wintner, A., Schmitz, C., Rowat, A.C., Merten, C.A., Pisignano, D., Griffiths, A.D.: Drop-based microfluidic devices for encapsulation of single cells. Lab Chip 8(7), 1110–1115 (2008)
Kaminski, T.S., Garstecki, P.: Controlled droplet microfluidic systems for multistep chemical and biological assays. Chem. Soc. Rev. 46(20), 6210–6226 (2017)
Kawakatsu, T., Kikuchi, Y., Nakajima, M.: Regular-sized cell creation in microchannel emulsification by visual microprocessing method. J. Am. Oil Chem. Soc. 74(3), 317–321 (1997)
Kumar, P., Pathak, M.: Droplet formation under wall slip in a microfluidic T-junction. J. Mol. Liq. 345, 117808 (2022a). https://doi.org/10.1016/j.molliq.2021.117808
Kumar, P., Pathak, M.: Dynamic wetting characteristics during droplet formation in a microfluidic T-junction. Int. J. Multiphase Flow 156, 104203 (2022b). https://doi.org/10.1016/j.ijmultiphaseflow.2022.104203
Laborie, B., Rouyer, F., Angelescu, D.E., Lorenceau, E.: Bubble Formation in Yield Stress Fluids Using Flow-Focusing and $T$-Junction Devices. Phys. Rev. Lett. 114(20), 204501 (2015). https://doi.org/10.1103/PhysRevLett.114.204501
Lan, W., Li, S., Luo, G.: Numerical and experimental investigation of dripping and jetting flow in a coaxial micro-channel. Chem. Eng. Sci. 134, 76–85 (2015)
Larson, R.G.: The structure and rheology of complex fluids, vol. 150. Oxford University Press, New York (1999)
Lee, J., Moon, H., Fowler, J., Schoellhammer, T., Kim, C.J.: Electrowetting and electrowetting-on-dielectric for microscale liquid handling. Sens. Actuators A 95(2–3), 259–268 (2002)
Lee, T.Y., Choi, T.M., Shim, T.S., Frijns, R.A., Kim, S.H.: Microfluidic production of multiple emulsions and functional microcapsules. Lab Chip 16(18), 3415–3440 (2016)
Li, L., Zhang, C.: Electro-hydrodynamics of droplet generation in a co-flowing microfluidic device under electric control. Colloid. Surface. A 586, 124258 (2020). https://doi.org/10.1016/j.colsurfa.2019.124258
Li, Q., Luo, K.H., Kang, Q., He, Y., Chen, Q., Liu, Q.: Lattice Boltzmann methods for multiphase flow and phase-change heat transfer. Prog. Energy Combust. Sci. 52, 62–105 (2016)
Li, X.B., Li, F.C., Yang, J.C., Kinoshita, H., Oishi, M., Oshima, M.: Study on the mechanism of droplet formation in T-junction microchannel. Chem. Eng. Sci. 69(1), 340–351 (2012)
Li, Z., Leshansky, A.M., Pismen, L.M., Tabeling, P.: Step-emulsification in a microfluidic device. Lab Chip 15(4), 1023–1031 (2015)
Lian, J., Luo, X., Huang, X., Wang, Y., Xu, Z., Ruan, X.: Investigation of microfluidic co-flow effects on step emulsification: Interfacial tension and flow velocities. Colloid. Surface. A 568, 381–390 (2019a). https://doi.org/10.1016/j.colsurfa.2019.02.040
Lian, J., Wu, J., Wu, S., Yu, W., Wang, P., Liu, L., Zuo, Q.: Investigation of viscous effects on droplet generation in a co-flowing step emulsification device. Colloid Surface A 629, 127468 (2021). https://doi.org/10.1016/j.colsurfa.2021.127468
Lian, J., Zheng, S., Liu, C., Xu, Z., Ruan, X.: Investigation of microfluidic co-flow effects on step emulsification: Wall contact angle and critical dimensions. Colloid. Surface. A 580, 123733 (2019b). https://doi.org/10.1016/j.colsurfa.2019.123733
Liu, J., Tan, S.-H., Yap, Y.F., Ng, M.Y., Nguyen, N.-T.: Numerical and experimental investigations of the formation process of ferrofluid droplets. Microfluid. Nanofluid. 11(2), 177–187 (2011a). https://doi.org/10.1007/s10404-011-0784-7
Liu, J., Yap, Y.F., Nguyen, N.-T.: Numerical study of the formation process of ferrofluid droplets. Phys. Fluids 23(7), 072008 (2011b). https://doi.org/10.1063/1.3614569
Liu, J.W., Wang, X.P.: Phase field simulation of drop formation in a coflowing fluid. Int. J. Numer. Anal. Model. 12(2), 268–285 (2015)
Liu, M., Chen, S., Qi, X.b., Li, B., Shi, R., Liu, Y., Chen, Y., Zhang, Z.: Improvement of wall thickness uniformity of thick-walled polystyrene shells by density matching. Chem. Eng. J. 241, 466–476 (2014)
Liu, X., Wu, L., Zhao, Y., Chen, Y.: Study of compound drop formation in axisymmetric microfluidic devices with different geometries. Colloid. Surface. A 533, 87–98 (2017)
Liu, X., Zhang, C., Yu, W., Deng, Z., Chen, Y.: Bubble breakup in a microfluidic T-junction. Sci. Bullet. 61(10), 811–824 (2016). https://doi.org/10.1007/s11434-016-1067-1
Liu, Y., Jiang, X.: Why microfluidics? Merits and trends in chemical synthesis. Lab Chip 17(23), 3960–3978 (2017)
Liu, Z., Cai, F., Pang, Y., Ren, Y., Zheng, N., Chen, R., Zhao, S.: Enhanced droplet formation in a T-junction microchannel using electric field: A lattice Boltzmann study. Phys. Fluids 34(8), 082006 (2022). https://doi.org/10.1063/5.0100312
Liu, Z., Liu, X., Jiang, S., Zhu, C., Ma, Y., Fu, T.: Effects on droplet generation in step-emulsification microfluidic devices. Chem. Eng. Sci. 246, 116959 (2021)
Long, W., Tsutahara, M., Kim, L.S., Ha, M.Y.: Three-dimensional lattice Boltzmann simulations of droplet formation in a cross-junction microchannel. Int. J. Multiphase Flow 34(9), 852–864 (2008)
Lu, P., Zhao, L., Zheng, N., Liu, S., Li, X., Zhou, X., Yan, J.: Progress and prospect of flow phenomena and simulation on two-phase separation in branching T-junctions: A review. Renew. Sust. Energ. Rev. 167, 112742 (2022). https://doi.org/10.1016/j.rser.2022.112742
Kahouadji, L., Nowak, E., Kovalchuk, N., Chergui, J., Juric, D., Shin, S., Simmons, M.J., Craster, R.V., Matar, O.K.: Simulation of immiscible liquid–liquid flows in complex microchannel geometries using a front-tracking scheme. Microfluidics & Nanofluidics (2018)
Malekzadeh, S., Roohi, E.: Investigation of Different Droplet Formation Regimes in a T-junction Microchannel Using the VOF Technique in OpenFOAM. Microgravity Sci. Technol. 27(3), 231–243 (2015). https://doi.org/10.1007/s12217-015-9440-2
Manshadi, M.K., Khojasteh, D., Abdelrehim, O., Gholami, M., Sanati-Nezhad, A.: Droplet-based microfluidic platforms and an overview with a focus on application in biofuel generation. Advances in Bioenergy and Microfluidic Applications, 387–406 (2021)
Miskin, M.Z., Jaeger, H.M.: Droplet formation and scaling in dense suspensions. Proc. Natl. Acad. Sci. 109(12), 4389–4394 (2012). https://doi.org/10.1073/pnas.1111060109
Mohammadi, K., Movahhedy, M.R., Khodaygan, S.: A multiphysics model for analysis of droplet formation in electrohydrodynamic 3D printing process. J. Aerosol. Sci. 135, 72–85 (2019). https://doi.org/10.1016/j.jaerosci.2019.05.001
Mohammadreza, N., Ali, Z.: Melt-spun Liquid Core Fibers: A CFD Analysis on Biphasic Flow in Coaxial Spinneret Die. Fibers Polym. 19(4), 905–913 (2018)
Montessori, A., Lauricella, M., Stolovicki, E., Weitz, D.A., Succi, S.: Jetting to dripping transition: Critical aspect ratio in step emulsifiers. Phys. Fluids 31(2), 021703 (2019). https://doi.org/10.1063/1.5084797
Montessori, A., Lauricella, M., Succi, S., Stolovicki, E., Weitz, D.: Elucidating the mechanism of step emulsification. Phys. Rev. Fluids 3(7), 072202 (2018)
Morozov, K.I., Leshansky, A.M.: Photonics of Template-Mediated Lattices of Colloidal Clusters. Langmuir 35(11), 3987–3991 (2019). https://doi.org/10.1021/acs.langmuir.8b03714
Mu, K., Si, T., Li, E., Xu, R.X., Ding, H.: Numerical study on droplet generation in axisymmetric flow focusing upon actuation. Phys. Fluids 30(1), 012111 (2018). https://doi.org/10.1063/1.5009601
Nangia, N., Patankar, N.A., Bhalla, A.P.S.: A DLM immersed boundary method based wave-structure interaction solver for high density ratio multiphase flows. J. Comput. Phys. 398, 108804 (2019)
Nathawani, D.K., Knepley, M.G.: Droplet formation simulation using mixed finite elements. Phys. Fluids 34(6), 064105 (2022)
Navarro, R., Zinchenko, A.Z., Davis, R.H.: Boundary-integral study of a freely suspended drop in a T-shaped microchannel. Int. J. Multiphase Flow 130, 103379 (2020)
Nguyen, N.T., Ting, T.H., Yap, Y.F., Wong, T.N., Chai, J., Ong, W.L., Zhou, J., Tan, S.H., Yobas, L.: Thermally mediated droplet formation in microchannels. Appl. Phys. Lett. 91(8), s10404 (2007)
Nooranidoost, M., Izbassarov, D., Muradoglu, M.: Droplet formation in a flow focusing configuration: Effects of viscoelasticity. Phys. Fluids 28(12), 123102 (2016). https://doi.org/10.1063/1.4971841
Notz, P.K., Basaran, O.A.: Dynamics of Drop Formation in an Electric Field. J. Colloid Interface Sci. 213(1), 218–237 (1999). https://doi.org/10.1006/jcis.1999.6136
Ofner, A., Mattich, I., Hagander, M., Dutto, A., Seybold, H., Rühs, P.A., Studart, A.R.: Controlled Massive Encapsulation via Tandem Step Emulsification in Glass. Adv. Funct. Mater. 29(4), 1806821 (2019). https://doi.org/10.1002/adfm.201806821
Ong, W.-L., Hua, J., Zhang, B., Teo, T.-Y., Zhuo, J., Nguyen, N.-T., Ranganathan, N., Yobas, L.: Experimental and computational analysis of droplet formation in a high-performance flow-focusing geometry. Sens. Actuators A 138(1), 203–212 (2007). https://doi.org/10.1016/j.sna.2007.04.053
Osher, S., Sethian, J.A.: Fronts propagating with curvature-dependent speed: Algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys. 79(1), 12–49 (1988)
Ouedraogo, Y., Gjonaj, E., Weiland, T., Gersem, H.D., Steinhausen, C., Lamanna, G., Weigand, B., Preusche, A., Dreizler, A., Schremb, M.: Electrohydrodynamic simulation of electrically controlled droplet generation. Int. J. Heat Fluid Flow 64, 120–128 (2017). https://doi.org/10.1016/j.ijheatfluidflow.2017.02.007
Park, S.-Y., Wu, T.-H., Chen, Y., Teitell, M.A., Chiou, P.-Y.: High-speed droplet generation on demand driven by pulse laser-induced cavitation. Lab Chip 11(6), 1010–1012 (2011)
Payne, E.M., Holland-Moritz, D.A., Sun, S., Kennedy, R.T.: High-throughput screening by droplet microfluidics: Perspective into key challenges and future prospects. Lab Chip 20(13), 2247–2262 (2020)
Peng, L., Yang, M., Guo, S.-S., Liu, W., Zhao, X.-Z.: The effect of interfacial tension on droplet formation in flow-focusing microfluidic device. Biomed. Microdevices 13(3), 559–564 (2011). https://doi.org/10.1007/s10544-011-9526-6
Peskin, C.S.: Flow patterns around heart valves: A numerical method. J. Comput. Phys. 10(2), 252–271 (1972)
Peskin, C.S.: The immersed boundary method. Acta Numer. 11, 479–517 (2002)
Petersen, K., Brinkerhoff, J.: On the lattice Boltzmann method and its application to turbulent, multiphase flows of various fluids including cryogens: A review. Phys. Fluids 33(4), 041302 (2021)
Pollack, M.G., Fair, R.B., Shenderov, A.D.: Electrowetting-based actuation of liquid droplets for microfluidic applications. Appl. Phys. Lett. 77(11), 1725–1726 (2000)
Priest, C., Herminghaus, S., Seemann, R.: Generation of monodisperse gel emulsions in a microfluidic device. Appl. Phys. Lett. 88(2), 474 (2006)
Prosperetti, A., Tryggvason, G.: Computational Methods for Multiphase Flow. Cambridge University Press, Computational Methods for Multiphase Flow (2009)
Qing-Yu Z., Sun, D.-K., Zhu M.F.: A multicomponent multiphase lattice Boltzmann model with large liquid-gas density ratios for simulations of wetting phenomena. Chin. Phys. B 26(8), 84701–084701 (2017). https://doi.org/10.1088/1674-1056/26/8/084701
Qiu, T., Lee, T.-C., Mark, A.G., Morozov, K.I., Muenster, R., Mierka, O., Turek, S., Leshansky, A.M., Fischer, P.: Swimming by reciprocal motion at low Reynolds number. Nat. Commun. 5(1), 1–8 (2014). https://doi.org/10.1038/ncomms6119
Rahimi, M., Shams Khorrami, A., Rezai, P.: Effect of device geometry on droplet size in co-axial flow-focusing microfluidic droplet generation devices. Colloid. Surface. A 570, 510–517 (2019). https://doi.org/10.1016/j.colsurfa.2019.03.067
Rahimi, M., Yazdanparast, S., Rezai, P.: Parametric study of droplet size in an axisymmetric flow-focusing capillary device. Chin. J. Chem. Eng. 28(4), 1016–1022 (2020). https://doi.org/10.1016/j.cjche.2019.12.026
Rostami, B., Morini, G.L.: Generation of Newtonian and non-Newtonian droplets in silicone oil flow by means of a micro cross-junction. Int J Multiphase Flow 105, 202–216 (2018)
Rostami, F., Rahmani, M.: Parametric study and optimization of oil drop process in a co-flowing minichannel. Colloid. Surface. A 647, 129040 (2022). https://doi.org/10.1016/j.colsurfa.2022.129040
Salinas, P., Pavlidis, D., Xie, Z., Jacquemyn, C., Melnikova, Y., Jackson, M.D., Pain, C.C.: Improving the robustness of the control volume finite element method with application to multiphase porous media flow. Int. J. Numer. Methods Fluids 85(4), 235–246 (2017)
Santra, S., Mandal, S., Chakraborty, S.: Phase-field modeling of multicomponent and multiphase flows in microfluidic systems: a review. Int. J. Numer. Method H 31(10), 3089–3131 (2021)
Sattari, A., Hanafizadeh, P.: Controlled preparation of compound droplets in a double rectangular co-flowing microfluidic device. Colloid. Surface. A 602, 125077 (2020). https://doi.org/10.1016/j.colsurfa.2020.125077
Sattari, A., Hanafizadeh, P.: Controllable preparation of double emulsion droplets in a dual-coaxial microfluidic device. J. Flow Chem. 11(4), 807–821 (2021). https://doi.org/10.1007/s41981-021-00155-4
Sattari, A., Hanafizadeh, P., Hoorfar, M.: Multiphase flow in microfluidics: From droplets and bubbles to the encapsulated structures. Adv. Colloid Interface Sci. 282, 102208 (2020)
Saye, R.I., Sethian, J.A.: A review of level set methods to model interfaces moving under complex physics: Recent challenges and advances. Handb. Numer. Anal. 21, 509–554 (2020)
Shahin, H., Mortazavi, S.: Three-dimensional simulation of microdroplet formation in a co-flowing immiscible fluid system using front tracking method. J. Mol. Liq. 243, 737–749 (2017). https://doi.org/10.1016/j.molliq.2017.08.082
Shahin, H., Mortazavi, S.: Three-dimensional numerical simulation of axis-switching and micro-droplet formation in a co-flowing immiscible elliptic jet flow system using front tracking method. Comput. Fluids 198, 104406 (2020). https://doi.org/10.1016/j.compfluid.2019.104406
Shan, X., Chen, H.: Lattice Boltzmann model for simulating flows with multiple phases and components. Phys. Rev. E 47(3), 1815 (1993)
Shao, J., Shu, C., Huang, H., Chew, Y.: Free-energy-based lattice Boltzmann model for the simulation of multiphase flows with density contrast. Phys. Rev. E 89(3), 033309 (2014)
Sheikholeslam Noori, S.M., Taeibi Rahni, M., Shams Taleghani, S.A.: Numerical Analysis of Droplet Motion over a Flat Plate Due to Surface Acoustic Waves. Microgravity Sci. Technol. 32(4), 647–660 (2020). https://doi.org/10.1007/s12217-020-09784-1
Shi, Y., Tang, G.H., Xia, H.H.: Lattice Boltzmann simulation of droplet formation in T-junction and flow focusing devices. Comput. Fluids 90, 155–163 (2014). https://doi.org/10.1016/j.compfluid.2013.11.025
Singer-Loginova, I., Singer, H.: The phase field technique for modeling multiphase materials. Rep. Prog. Phys. 71(10), 106501 (2008)
Singh, R., Bahga, S.S., Gupta, A.: Electrohydrodynamic droplet formation in a T-junction microfluidic device. J. Fluid Mech. 905, A29 (2020). https://doi.org/10.1017/jfm.2020.749
Sontti, S.G., Atta, A.: CFD analysis of microfluidic droplet formation in non–Newtonian liquid. Chem. Eng. J. 330, 245–261 (2017)
Sontti, S.G., Atta, A.: Numerical Insights on Controlled Droplet Formation in a Microfluidic Flow-Focusing Device. Ind. Eng. Chem. Res. 59(9), 3702–3716 (2020). https://doi.org/10.1021/acs.iecr.9b02137
Soroor, M., Zabetian Targhi, M., Tabatabaei, S.A.: Numerical and experimental investigation of a flow focusing droplet-based microfluidic device. Eur. J. Mech. B Fluids 89, 289–300 (2021). https://doi.org/10.1016/j.euromechflu.2021.06.013
Stone, H.A., Leal, L.G.: Breakup of concentric double emulsion droplets in linear flows. J. Fluid Mech. 211, 123–156 (1990)
Sugiura, N.: Tong, JH, Nabetani, Seki: Preparation of monodispersed solid lipid microspheres using a microchannel emulsification technique. J. Colloid Interf. Sci. 227(1), 95–103 (2000)
Sugiura, S., Nakajima, M., Iwamoto, S., Seki, M.: Interfacial Tension Driven Monodispersed Droplet Formation from Microfabricated Channel Array. Langmuir 17(18), 5562–5566 (2001)
Sunder, S., Tomar, G.: Numerical simulations of bubble formation from a submerged orifice and a needle: The effects of an alternating electric field. Eur. J. Mech. B Fluids 56, 97–109 (2016). https://doi.org/10.1016/j.euromechflu.2015.11.014
Tan, S.H., Nguyen, N.T., Yobas, L., Kang, T.G.: Formation and manipulation of ferrofluid droplets at a microfluidic T-junction. J. Micromech. Microeng. 20(4), 045004- (2010)
Teo, A.J., Yan, M., Dong, J., Xi, H.-D., Fu, Y., Tan, S.H., Nguyen, N.-T.: Controllable droplet generation at a microfluidic T-junction using AC electric field. Microfluid. Nanofluid. 24(3), 1–9 (2020)
Theberge, A., Courtois, F., Schaerli, Y., Fischlechner, M., Abell, C., Hollfelder, F., Huck, W.: Microdroplets in Microfluidics: An Evolving Platform for Discoveries in Chemistry and Biology. ChemInform 41(45), 5846–5868 (2010)
Thorsen, T., Roberts, R.W., Arnold, F.H., Quake, S.R.: Dynamic pattern formation in a vesicle-generating microfluidic device. Phys. Rev. Lett. 86(18), 4163–4166 (2001). https://doi.org/10.1103/PhysRevLett.86.4163
Utada, A.S., Fernandez-Nieves, A., Stone, H.A., Weitz, D.A.: Dripping to Jetting Transitions in Coflowing Liquid Streams. Phys. Rev. Lett. 90(9), 094502 (2007)
Varma, V.B., Ray, A., Wang, Z.M., Wang, Z.P., Ramanujan, R.V.: Droplet Merging on a Lab-on-a-Chip Platform by Uniform Magnetic Fields. Sci. Rep. 6(1), 37671 (2016). https://doi.org/10.1038/srep37671
Vu, T.V., Homma, S., Tryggvason, G., Wells, J.C., Takakura, H.: Computations of breakup modes in laminar compound liquid jets in a coflowing fluid - ScienceDirect. Int. J. Multiphase Flow 49(3), 58–69 (2013)
Wörner, M.: Numerical modeling of multiphase flows in microfluidics and micro process engineering: a review of methods and applications. Microfluid. Nanofluid. 12(6), 841–886 (2012)
Wang, H., Fu, Y., Wang, Y., Yan, L., Cheng, Y.: Three-dimensional lattice Boltzmann simulation of Janus droplet formation in Y-shaped co-flowing microchannel. Chem. Eng. Sci. 225, 115819 (2020a). https://doi.org/10.1016/j.ces.2020.115819
Wang, H., Yuan, X., Liang, H., Chai, Z., Shi, B.: A brief review of the phase-field-based lattice Boltzmann method for multiphase flows. Capillarity 2(3), 33–52 (2019)
Wang, J.-X., Yu, W., Wu, Z., Liu, X., Chen, Y.: Physics-based statistical learning perspectives on droplet formation characteristics in microfluidic cross-junctions. Appl. Phys. Lett. 120(20), 204101 (2022). https://doi.org/10.1063/5.0086933
Wang, L.L., Li, G.J., Tian, H., Ye, Y.H.: Simulations of droplet formation in a t-junction micro-channel using the phase field method. Int. J. Comput. Methods 11(04), 1350096 (2014). https://doi.org/10.1142/s0219876213500965
Wang, M., Kong, C., Liang, Q., Zhao, J., Wen, M., Xu, Z., Ruan, X.: Numerical simulations of wall contact angle effects on droplet size during step emulsification. RSC Adv. 8(58), 33042–33047 (2018)
Wang, N., Semprebon, C., Liu, H., Zhang, C., Kusumaatmaja, H.: Modelling double emulsion formation in planar flow-focusing microchannels. J. Fluid Mech. 895, A22 (2020b). https://doi.org/10.1017/jfm.2020.299
Wang, Y., Chen, Z., Bian, F., Shang, L., Zhu, K., Zhao, Y.: Advances of droplet-based microfluidics in drug discovery. Expert Opin. Drug Discov. 15(8), 969–979 (2020c)
Wei Gao, C.Y.: Feng Yao: Droplets breakup via a splitting microchannel. Chin. Phys. B 29(5), 54702–054702 (2020). https://doi.org/10.1088/1674-1056/ab7b4b
Wilkes, E.D., Phillips, S.D., Basaran, O.A.: Computational and experimental analysis of dynamics of drop formation. Phys. Fluids 11(12), 3577–3598 (1999)
Woerner, M.: Numerical modeling of multiphase flows in microfluidics and micro process engineering: a review of methods and applications. Microfluid. Nanofluid. 12(6), 841–886 (2012)
Wong, V.L., Loizou, K., Lau, P.L., Graham, R.S., Hewakandamby, B.N.: Numerical studies of shear-thinning droplet formation in a microfluidic T-junction using two-phase level-SET method. Chem. Eng. Sci. 174, 157–173 (2017)
Wu, L., Liu, X., Zhao, Y., Chen, Y.: Role of local geometry on droplet formation in axisymmetric microfluidics. Chem. Eng. Sci. 163, 56–67 (2017)
Xiao, W., Zhang, H., Luo, K., Mao, C., Fan, J.: Immersed boundary method for multiphase transport phenomena. Rev. Chem. Eng. 38(4), 363–405 (2020)
Yan, Q., Xuan, S., Ruan, X., Wu, J., Gong, X.: Magnetically controllable generation of ferrofluid droplets. Microfluid Nanofluidic 19(6), 1377–1384 (2015)
Yan, W.-C., Davoodi, P., Tong, Y.W., Wang, C.-H.: Computational study of core-shell droplet formation in coaxial electrohydrodynamic atomization process. AlChE J. 62(12), 4259–4276 (2016). https://doi.org/10.1002/aic.15361
Yan, Y., Guo, D., Wen, S.Z.: Numerical simulation of junction point pressure during droplet formation in a microfluidic T-junction. Chem. Eng. Sci. 84, 591–601 (2012). https://doi.org/10.1016/j.ces.2012.08.055
Yang, H., Zhou, Q., Fan, L.S.: Three-dimensional numerical study on droplet formation and cell encapsulation process in a micro T-junction. Chem. Eng. Sci. 87, 100–110 (2013)
Yin, J., Kuhn, S.: Numerical simulation of droplet formation in a microfluidic T-junction using a dynamic contact angle model. Chem. Eng. Sci. 261, 117874 (2022). https://doi.org/10.1016/j.ces.2022.117874
Yin, S., Huang, Y., Wong, T.N., Ooi, K.T.: Dynamics of droplet in flow-focusing microchannel under AC electric fields. Int. J. Multiphase Flow 125, 103212 (2020). https://doi.org/10.1016/j.ijmultiphaseflow.2020.103212
Youngren, G.K., Acrivos, A.: Stokes flow past a particle of arbitrary shape: a numerical method of solution. J. Fluid Mech. 69(02), 377–403 (2006)
Yu, C., Wu, L., Li, L., Liu, M.: Experimental study of double emulsion formation behaviors in a one-step axisymmetric flow-focusing device. Exp. Therm. Fluid. Sci. (2019a). https://doi.org/10.1016/j.expthermflusci.2018.12.032
Yu, W., Li, B., Liu, X., Chen, Y.: Hydrodynamics of triple emulsion droplet generation in a flow-focusing microfluidic device. Chem. Eng. Sci. 243, 116648 (2021). https://doi.org/10.1016/j.ces.2021.116648
Yu, W., Liu, X., Li, B., Chen, Y.: Experiment and prediction of droplet formation in microfluidic cross-junctions with different bifurcation angles. Int. J. Multiphase Flow 149, 103973 (2022). https://doi.org/10.1016/j.ijmultiphaseflow.2022.103973
Yu, W., Liu, X.D., Zhao, Y.J., Chen, Y.P.: Droplet generation hydrodynamics in the microfluidic cross-junction with different junction angles. Chem. Eng. Sci. 203, 259–284 (2019b). https://doi.org/10.1016/j.ces.2019.03.082
Zhang, C.B., Gao, W., Zhao, Y.J., Chen, Y.P.: Microfluidic generation of self-contained multicomponent microcapsules for self-healing materials. Appl. Phys. Lett. 113(20) (2018). https://doi.org/10.1063/1.5064439
Zhang, D.F., Stone, H.A.: Drop formation in viscous flows at a vertical capillary tube. Phys. Fluids 9(8), 2234–2242 (1997)
Zhang, H., Chang, H., Neuzil, P.: DEP-on-a-chip: Dielectrophoresis applied to microfluidic platforms. Micromachines 10(6), 423 (2019)
Zhang, J., Zhang, X., Zhao, W., Liu, H., Jiang, Y.: Effect of surfactants on droplet generation in a microfluidic T-junction: A lattice Boltzmann study. Phys. Fluids 34(4), 042121 (2022). https://doi.org/10.1063/5.0089175
Zhang, J.F.: Lattice Boltzmann method for microfluidics: models and applications. Microfluid. Nanofluid. 10(1), 1–28 (2011). https://doi.org/10.1007/s10404-010-0624-1
Zhang, S., Ling, K., Sun, N., Yang, S., Hao, X., Sui, X., Tao, W.-Q.: 2-D numerical study of ferrofluid droplet formation from microfluidic T-junction using VOSET method. Numer. Heat Transf. A 79(9), 611–630 (2021a). https://doi.org/10.1080/10407782.2021.1872283
Zhang, T., Zou, X., Xu, L., Pan, D., Huang, W.: Numerical investigation of fluid property effects on formation dynamics of millimeter-scale compound droplets in a co-flowing device. Chem. Eng. Sci. 229, 116156 (2021b). https://doi.org/10.1016/j.ces.2020.116156
Zhou, C., Yue, P., Feng, J.J.: Formation of simple and compound drops in microfluidic devices. Phys. Fluids 18(9), 1250 (2006)
Zhu, P., Wang, L.: Passive and active droplet generation with microfluidics: a review. Lab Chip 17(1), 34–75 (2017)
Zwan, E., Sman, R., Schro?N, K., Boom, R.: Lattice Boltzmann simulations of droplet formation during microchannel emulsification. J. Colloid Interface Sci. 335(1), 112 (2009)
Funding
This work is supported by National Natural Science Foundation of China (No. 52006187).
Author information
Authors and Affiliations
Contributions
Liangyu Wu, Jian Qian and Xuyun Liu wrote the main manuscript text. Suchen Wu wrote the numerical methods. Cheng Yu revised the manuscript. Xiangdong Liu designed the project. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Conflict of interest statement
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Wu, L., Qian, J., Liu, X. et al. Numerical Modelling for the Droplets Formation in Microfluidics - A Review. Microgravity Sci. Technol. 35, 26 (2023). https://doi.org/10.1007/s12217-023-10053-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12217-023-10053-0