
Abstract
This paper investigates the Rayleigh Benard instability of a viscous, Newtonian, Boussinesq fluid with time-periodic boundary temperature modulation using the framework of weakly nonlinear theory. Critical Rayleigh number is computed for asymptotic stability criterion using the energy method accompanied by variational algorithm. Subcritical instability is found to occur under two conditions: when modulation is in anti-phase and when modulation is imposed only on the lower boundary. Supercritical stability is witnessed during in-phase modulation. In all the three cases of the relative phase of two boundary temperatures, the effect of modulation is found to be weaker for infinitesimal disturbances. The findings of the present study could be referred in several applications where appropriate temperature modulation is of prime concern.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Hydrodynamic stability deals with the instability of basic motion (stationary/ laminar) of fluid flow and its subsequent transition to turbulence. Various problems have been studied earlier in the hydrodynamic stability domain. However, present study is focused on the Rayleigh-Benard instability. In a classical Rayleigh-Benard instability, a thin fluid layer, which extends infinitely in horizontal directions, is heated from below. The resulting adverse temperature gradient causes unstable fluid configuration which leads to redistribution of the fluid into a state of the favorable density gradient. However, the viscosity of the fluid inhibits such redistribution. Viscosity and thermal diffusivity responsible for diffusion and dissipation have stabilizing effects. On the other end, temperature difference is responsible for bulk fluid motion and has a de-stabilizing effect. Rayleigh number, which is a function of non-dimensional temperature difference needs to exceed a critical value for the onset of thermal instability. As a result of instability, the fluid layer resolves into convective cells known as Benard cells. In particular, fluid moves up through the center of the cell, then spreads out and sinks at the edges of the cell. These Benard cells exhibit hexagonal shape in vertical view.
In practical applications, delay or advance of the onset of instability is often required. This can be achieved in different ways such as, boundary temperature modulation, gravity modulation, internal heating of the fluid layer, imposing magnetic field on the electrically conducting fluid layer, angular velocity modulation in the case of fluid layer between rotating concentric cylinders, etc. A delay in the onset of instability allows the fluid motion to sustain in the laminar regime even beyond the critical values of governing parameters. As a result of laminar flow, frictional losses are less, which increases the efficiency of the system. On the other end, an advancement in the onset of instability aids in the enhancement of mass, momentum, and energy transfer even below the critical values of governing parameters.
Several theoretical and experimental investigations have been carried out to study the onset of Rayleigh-Benard instability. Bénard (1901) carried out the first quantitative experiments on the onset of thermal instability in a very thin horizontal fluid layer heated from below. He recognized the role of viscosity in the phenomenon. Later, Rayleigh (1916) theoretically explained the experimental findings of Bénard. A number of theoretical studies based on linear stability theory are available in literature which deal with Rayleigh-Benard instability under periodic boundary temperature modulation. Malkus and Veronis (1958) initiated expanding the perturbation variables asymptotically in the powers of the amplitude of modulation. Venezian (1969) determined analytically the shift in critical Rayleigh number for different values of modulation frequency, Prandtl number, relative phase of two boundary temperatures subject to time-dependent sinusoidally modulated wall temperatures and free-free type walls (characterized by zero normal velocity and zero tangential stress at the wall). Similarly, Raju and Bhattacharyya (2010) obtained exact values of the shift in critical Rayleigh number subject to time-dependent sinusoidally modulated wall temperatures and rigid-rigid type walls (characterized by zero normal velocity and no-slip condition).
Serrin (1959) adopted the energy method to study the stability of non-convective laminar flows using weakly nonlinear theory. He determined universal stability criteria for arbitrary disturbances in bounded regions, and periodic disturbances in unbounded regions with arbitrary geometrical configuration. He considered crude estimates for terms in the energy equation and obtained an improved stability criterion by employing a variational algorithm. Joseph (1965) extended Serrin’s work to analyze the stability of convective laminar flows governed by Boussinesq equations. Later, Homsy (1974) adopted strong global stability and asymptotic stability criteria to obtain the stability limits of Rayleigh-Benard instability with both gravity and surface temperature modulation. Regarding surface temperature modulation, he determined the strong global stability and asymptotic stability limits for rigid-rigid wall boundary conditions, when modulation was in anti-phase and only lower boundary was modulated.
Boundary temperature modulation is one of the possible ways to achieve delay or advance in the onset of instability. In the present study, weakly nonlinear theory is used to explore the thermal stability characteristics of a thin, horizontal stationary fluid layer between two parallel rigid planes with time-periodic boundary temperature modulation. The fluid is viscous, Newtonian, and Boussinesq in nature. The asymptotic stability criterion is considered, where the energy of all disturbances decays monotonically during an arbitrary cycle of modulation. Critical Rayleigh number Racr is computed using the energy method (Straughan 1992) accompanied by variational algorithm (Serrin 1959: Arthurs 1970). In the variational approach, disturbances of just sufficient amplitude are considered such that non-linearity will be significant. In order to identify the type of transition (subcritical instability/supercritical stability) of the stationary fluid, stability limits obtained in the present study are compared with the linear stability limits reported by Raju and Bhattacharyya (2010), where, they considered infinitesimal perturbation fields and expanded them to the powers of δ. The shift in Racr is computed from solvability condition acquired using the adjoint method for different values of Pr, σ, C.
Mathematical Formulation
In the present study, a thin, horizontal, stationary fluid layer bounded between two rigid planes at z = − d/2 and z = d/2 is considered. The fluid layer is infinite in horizontal directions. The fluid is assumed to be viscous, Newtonian, and Boussinesq in nature. The geometric configuration of the region is shown in Fig. 1. The non-dimensional governing equations (continuity, momentum, and energy equations) treated with Boussinesq approximation are as follows,

Geometric configuration of the region
Here, non-dimensionalization is carried out using the terms d, d2/κT, κT/d, ρ∞(κT/d)2 and (T0 − T∞) for coordinates, time, velocity, pressure and temperature respectively. Pr = ν/κT is Prandtl number, and Ra = gαTΔTd3/νκT is Rayleigh number. Here, d is the fluid layer thickness, κT is the fluid thermal diffusivity, ρ∞ is the reference uniform density at the reference temperature T∞, T0 is the temperature at z = − d/2, g is the acceleration due to gravity, αT is the coefficient of thermal expansion of the fluid, ν is the fluid kinematic viscosity and ΔT is the temperature difference between the two boundaries. The temperature on the top and bottom rigid boundaries changes in the following manner
where, δ and σ are amplitude and frequency of the modulation respectively. Both bounding planes are assumed to be rigid and at rest. Therefore, velocity boundary condition is
Considering a basic hydrostatic solution with no fluid motion,
Substituting Eq. (6) into Eq. (2) and (3) results in
The following basic hydrostatic temperature distribution is obtained by solving Eq. (8) along with the boundary conditions mentioned in Eq. (4). The solution is obtained by using the separation of variables method (Hancock 2005)
where,
where double overbar represents a complex conjugate. Imposing perturbations on the basic hydrostatic solution results in the following field variables (Chandrasekhar 1961; Drazin and Reid 2004; Nayfeh 2008)
where prime represents the perturbation field. The equations governing the perturbation field are obtained by substituting Eq. (13) into Eq. (1)–(3), (5) and then simplified by using Eq. (7), and Eq. (8),
Here, \( {\overrightarrow{V}}^{\prime }=0 \) at z = ± 1/2, because bounding planes are rigid. Whereas, T′ = 0 at z = ± 1/2, because the temperature is controlled externally at the bounding planes.
Solution
In the present section, weakly nonlinear energy stability theory is considered to obtain the critical Rayleigh number. Scalar product of Eq. (15) with \( {\overrightarrow{V}}^{\prime } \), multiplication of Eq. (16) with T′ and using the appropriate mathematical identities along with Eq. (14) results in
where operator ‘:’ represents the double dot product.  is considered as the domain of space enclosed by the surface S. The fluid layer is unbounded in x and y direction, but the occurrence of convective cells ensures the periodic boundary conditions. The periodicity of the boundary conditions are λx = 2π/ax and λy = 2π/ay in x and y directions respectively (ax and ay are the wavenumbers of oscillation in x and y directions respectively). Therefore, the surface S is considered as x = ± λx/2, y = ± λy/2 and z = ± 1/2. Integration of Eq. (18) and (19) over
is considered as the domain of space enclosed by the surface S. The fluid layer is unbounded in x and y direction, but the occurrence of convective cells ensures the periodic boundary conditions. The periodicity of the boundary conditions are λx = 2π/ax and λy = 2π/ay in x and y directions respectively (ax and ay are the wavenumbers of oscillation in x and y directions respectively). Therefore, the surface S is considered as x = ± λx/2, y = ± λy/2 and z = ± 1/2. Integration of Eq. (18) and (19) over  , by employing divergence theorem, and by equating surface integrals over the surface S to zero (since the values of \( {\overrightarrow{V}}^{\prime } \) and T′ are periodic in x and y directions, and \( {\overrightarrow{V}}^{\prime }=0 \), T′ = 0 at z = ± 1/2), results in
, by employing divergence theorem, and by equating surface integrals over the surface S to zero (since the values of \( {\overrightarrow{V}}^{\prime } \) and T′ are periodic in x and y directions, and \( {\overrightarrow{V}}^{\prime }=0 \), T′ = 0 at z = ± 1/2), results in


where,  is kinetic energy and
is kinetic energy and  is thermal energy of the disturbance motion. The energy equation of the disturbance motion is obtained by adding Eq. (20) and (21) in the form \( \frac{dK}{dt}+{\lambda}_1\mathit{\Pr}\frac{dU}{dt} \) (Straughan 1992) and is given by
is thermal energy of the disturbance motion. The energy equation of the disturbance motion is obtained by adding Eq. (20) and (21) in the form \( \frac{dK}{dt}+{\lambda}_1\mathit{\Pr}\frac{dU}{dt} \) (Straughan 1992) and is given by

where, E is the total energy of the disturbance motion. A positive constant λ1 called coupling parameter is introduced to optimize stability limits. Sufficient condition for the flow field to be asymptotically stable is \( \frac{dE}{dt}<0 \). Since Pr > 0, Eq. (22) results in

Now, considering the normalizing condition for Eq. (23) as

Then Eq. (23) results in to

In order to obtain the minimum value of the Rayleigh number (critical Rayleigh number), Eqs. (14), (24) and (25) can be formulated into a minimization problem with Lagrange multipliers P = P(x, y, z, t) and \( {R}_{\lambda_1} \)as given in Eq. (26).
Minimize

Let  has extremum at \( \overrightarrow{\upsilon} \), θ corresponding to \( {\overrightarrow{V}}^{\prime } \), T′ respectively. Then considering variations of \( {\overrightarrow{V}}^{\prime } \), T′ about \( \overrightarrow{\upsilon} \), θ in the following way
has extremum at \( \overrightarrow{\upsilon} \), θ corresponding to \( {\overrightarrow{V}}^{\prime } \), T′ respectively. Then considering variations of \( {\overrightarrow{V}}^{\prime } \), T′ about \( \overrightarrow{\upsilon} \), θ in the following way
where \( \overrightarrow{h} \) and η are arbitrary functions continuous in  , ξ is an infinitesimal variable. Using Eq. (27), (14) and by employing the order of magnitude analysis, the equation obtained is
, ξ is an infinitesimal variable. Using Eq. (27), (14) and by employing the order of magnitude analysis, the equation obtained is
Following the principle of variational calculus for Eq. (26) results in

Substituting Eq. (27) in Eq. (30) and separately collecting the terms containing \( \overrightarrow{h} \), η and ∇·, followed by the use of divergence theorem results in

Now, substituting Eq. (27) into Eq. (17) and the order of magnitude analysis results in
Equation (32) implies that the surface integral in Eq. (31) is zero. For arbitrary functions \( \overrightarrow{h} \) and η, Eq. (31) results in to
Equations (34) and (35) are Euler-Lagrange equations. Weakly nonlinear energy stability problem is governed by Eqs. (29), (34), and (35) subject to boundary conditions Eq. (33). Let \( \overrightarrow{\upsilon}=\left(u,v,w\right) \). Representing Eq. (29), (34), (35) and (33) in the scalar form after eliminating u, v and P results in
As \( {\overrightarrow{V}}^{\prime }=\left(u\overrightarrow{i}+v\overrightarrow{j}+w\overrightarrow{k}\right)+\xi \overrightarrow{h} \) and T′ = θ + ξη are periodic in x and y directions, w(x, y, z, t) and θ(x, y, z, t) are also periodic with wavenumbers ax and ay in x and y directions respectively. Therefore, by normal mode analysis
where W and ψ are the amplitude of velocity and temperature perturbations respectively. Defining resultant wave number as \( a=\sqrt{a_x^2+{a}_y^2} \), substituting Eq. (39), (40) in Eq. (36)–(38) followed by some rearrangement results in,
At the onset of instability, perturbation variables tend to be periodic in time with a frequency equal to the temperature modulation frequency. Therefore, expressing W(z, t) and ψ(z, t) in the form similar to the basic hydrostatic solution can be obtained as
Now, substituting Eq. (44), (45) and (9)–(12) in Eq. (41)–(43), and equating terms containing like powers of eniσt for n = − 1, 0, + 1 results in
Results and Discussion
Equations (46)–(52) were solved numerically to obtain critical Rayleigh number Racr. Racr was obtained using the current formulation and is found to be independent of Pr. These equations were formulated into an eigenvalue problem, with \( {R}_{\lambda_1} \) as the eigenvalue. \( {R}_{\lambda_1} \) is a function of λ1. Racris the minimum \( {R}_{\lambda_1} \) (say \( {R}_{\lambda_{1,\min }} \)) corresponding to an optimum λ1. λ1 is optimum when \( {R}_{\lambda_{1,\min }} \) is maximum. The golden section method was employed to obtain an optimum value of λ1. In the present study, the maximum value of modulation amplitude is limited to 0.1 to preserve the weakly nonlinear nature of the disturbances.
Figure 2 depicts the comparison of the stability limits of the asymptotic stability criterion obtained in the present study with the stability limits associated with asymptotic stability and strong global stability criterion of Homsy (1974) for C = 0, σ = 1, and Pr = 1. Among the three stability criteria, only Homsy’s asymptotic stability limits are dependent on Pr. It is well-known fact that, stricter the stability criterion, the more unstable is the basic motion at the lower value of stability limits. Thus, from the definitions of three stability criteria discussed in the introduction, stability limits should be increasing in subsequent order beginning with the Homsy’s asymptotic stability criterion followed by asymptotic stability criterion of the current study, and Homsy’s strong global stability criterion at last. Figure 2 shows the above behavior, which qualitatively validates the current formulation.

The stability limits of three stability criteria for C = 0, σ = 1, and Pr = 1. Lower two curves are independent of Pr
The remainder of the paper is on the results of the asymptotic stability criterion of the current study. In Fig. 3, stability limits of the current study were plotted as a function of σ for C = 0 and for different values of δ. It is found that as the amplitude of modulation decreases, the effect of modulation reduced. In addition, it is observed that the asymptotic stability criterion of the current study is independent of Pr.

Variation of stability limits of present study with σ for different values of δ for the case of C = 0
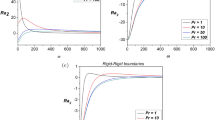
Figures 4, 5, and 6 compare the stability limits of weakly nonlinear energy stability theory considered in the present study with the limits obtained using linear stability theory as reported by Raju and Bhattacharyya (2010). Comparison of the stability limits of two theories was carried out for δ= 0.01. In the current section, results obtained using weakly nonlinear energy stability theory are discussed. The comparison of the stability limits of the two theories are discussed in the next section.

Linear stability and weakly nonlinear energy stability limits for C = − 1, i.e., when modulation is in anti-phase. Weakly nonlinear energy stability limits are independent of Pr

Linear stability and weakly nonlinear energy stability limits for C = 0, i.e., when only lower boundary is modulated. Weakly nonlinear energy stability limits are independent of Pr

Linear stability and weakly nonlinear energy stability limits for C = 1, i.e., when modulation is in-phase. Weakly nonlinear energy stability limits are independent of Pr
Racr is a function of δ, σ, C and independent of Pr. Figures 4, 5 and 6 show Racr as a function of σ for C = −1, 0 and 1 respectively. For C = − 1, 0, modulation is destabilizing for all values of σ. Racr increases monotonically with σ and tends asymptotically to a value of 1707.41 at σ > 300. Therefore, for C = − 1, 0, the effect of modulation becomes negligible as σ increases to a large value. For C = 1, modulation is stabilizing for all values of σ. Racr tends asymptotically to a value of 1707.73 at σ ≈ 300. Therefore, for C = 1, the effect of modulation is sustained to be stabilizing even if σ increases to a very large value. It is observed that Racris shifting towards higher values when modulation is changing from anti-phase to in-phase. Therefore, the effect of modulation becomes more stabilizing when modulation is changing from anti-phase to in-phase.
Comparison of Linear Stability and Weakly Nonlinear Energy Stability Theory Results
In the present section, the comparison of the stability limits of linear stability theory (Raju and Bhattacharyya (2010)) and weakly nonlinear energy stability theory of the present study are discussed.
Raju and Bhattacharyya (2010) calculated the shift in the critical Rayleigh number \( R{a}_{cr}^{(2)} \) from the solvability condition obtained using the adjoint method. Critical Rayleigh number was computed using \( R{a}_{cr}=R{a}_{cr}^{(0)}+{\delta}^2R{a}_{cr}^{(2)} \). Here \( R{a}_{cr}^{(0)} \) is the critical Rayleigh number for the unmodulated case, which is 1707.41. In linear theory, Racr is a function of δ, σ, C and Pr. Regarding linear stability, the effect of modulation becomes negligible at σ ≈ 100 for C = − 1, 0 (Figs. 4 and 5) and at σ ≈ 200 for C = 1 (Fig. 6).
When modulation is in anti-phase and when only lower boundary is modulated (Figs. 4 and 5), subcritical instability is noticed for all values of σ and Pr. For a given Pr, the range of subcritical instability decreases with an increase in σ and becomes constant at very large values of σ. As Pr increases, the range of subcritical instability decreases till σ ≈ 100. For a given value of σ and Pr, the range of subcritical instability is larger when modulation is in anti-phase.
When modulation is in-phase (Fig. 6), supercritical stability occurs for all values of σ and Pr. For a given Pr, the range of supercritical stability is nearly constant for all values of σ. As Pr increases, the range of supercritical stability increases till σ ≈ 200.
For C = −1, 0 and 1, for a given value of σ and Pr, the shift occurred in the critical Rayleigh number due to the temperature modulation i.e., ∣Racr, modulation − Racr, nomodulation∣ is higher in case of weakly nonlinear energy stability theory when compared to linear stability theory. Thus, the effect of modulation is weaker on infinitesimal disturbances.
Conclusions
In the present study, critical Rayleigh number for the rigid boundary configuration as shown in Fig. 1 has been carried out using weakly nonlinear theory. Time-periodic modulated temperature is imposed on rigid boundaries. For all the three cases under consideration, critical Rayleigh number was found to be independent of Prandtl number. A coupling parameter λ1 was introduced to optimize the stability limits, which was computed by employing the golden section method. To preserve the weakly nonlinear nature of the disturbances, the maximum value of modulation amplitude was limited to 0.1. The current formulation was validated qualitatively by comparing the results with the results of Homsy (1974). When modulation is in anti-phase and when only lower boundary is modulated, modulation is destabilizing for all values of σ and Pr. The range of subcritical instability decreases with an increase in σ and Pr. For a given value of σ and Pr, the range of subcritical instability is larger when modulation is in anti-phase. The effect of modulation becomes more stabilizing when modulation is changing from anti-phase to in-phase. Supercritical stability occurs when modulation is in-phase, for all values of σ and Pr. The effect of modulation was found to be weaker on infinitesimal disturbances in all the three cases of the relative phase of temperature modulation between two boundaries. Therefore, the present work helps in determining the factors to achieve the delay or onset of Rayleigh-Benard instability through different means of temperature modulation which is required in various practical applications.
References
Arthurs, A.M.: Complementary Variational Principles. Clarendon Press, Oxford (1970)
Bénard, H.: Les tourbillons cellulaires dans une nappe liquide propageant de la chaleur par convection en régime permanent, Ann. de Ch. et de Phys. (1901)
Chandrasekhar, S.: Hydrodynamic and Hydromagnetic Stability. Oxford University Press, London (1961)
Drazin, P.G., Reid, W.H.: Hydrodynamic stability. Cambridge University press, Cambridge (2004)
Hancock MJ.: 18.303 linear partial differential equations, Fall (2005)
Homsy, G.M.: Global stability of time-dependent flows. Part 2. Modulated fluid layers. J. Fluid Mech. 62(02), 387–403 (1974)
Joseph, D.D.: On the stability of the Boussinesq equations. Arch. Ration. Mech. Anal. 20(1), 59–71 (1965)
Malkus, W.V., Veronis, G.: Finite amplitude cellular convection. J. Fluid Mech. 4(03), 225–260 (1958)
Nayfeh, A.H.: Perturbation Methods. Wiley, Hoboken (2008)
Raju, V.R.K., Bhattacharyya, S.N.: Onset of thermal instability in a horizontal layer of fluid with modulated boundary temperatures. J. Eng. Math. 66(4), 343–351 (2010)
Rayleigh, L.: On convection currents in a horizontal layer of fluid, when the higher temperature is on the under side. London Edinburgh Dublin Philosophic Mag J Sci. 32(192), 529–546 (1916)
Serrin, J.: On the stability of viscous fluid motions. Arch. Ration. Mech. Anal. 3(1), 1–13 (1959)
Straughan, B.: The Energy Method, Stability, and Nonlinear Convection. Springer-Verlag, New York (1992)
Venezian, G.: Effect of modulation on the onset of thermal convection. J. Fluid Mech. 35(02), 243–254 (1969)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kumar, A., Raju, V.R.K. & Das, S. Onset of Rayleigh-Benard Convection with Periodic Boundary Temperatures Using Weakly Nonlinear Theory. Microgravity Sci. Technol. 32, 1237–1243 (2020). https://doi.org/10.1007/s12217-020-09844-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12217-020-09844-6