
Abstract
In this paper, we study instability of solitary wave solutions of the generalized two space-dimensional Benjamin equation \((u_t+u_{xxx}-\beta {\mathscr {H}}u_{xx}+(u^p)_x)_x=u_{yy}\). This equation governs the evolution of waves at the interface of a two-fluid system in which surface-tension effects cannot be ignored. We improve the previous work by Chen et al. (Proc R Soc A 464:49–64, 2008, https://doi.org/10.1098/rspa.2007.0013) to the case \(\beta <0\) and \(p>7/3\), and show that solitary waves of this equation are unstable by the mechanism of blow-up.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
This paper is concerned with the following generalized two-dimensional Benjamin equation
where \(u=u(x,y,t)\) is a real valued-function, \(p>1\) and \({\mathscr {H}}\) is the Hilbert transform in x-direction defined by
Here \(\mathrm{p.v.}\) denotes the Cauchy principle value. Equations (1.1) combines the KDV and the Benjamin–Ono dispersive terms with the transverse variation term of the KP equation. It was introduced by Kim and Akylas [10] to model interfacial gravity-capillary (water) waves. Hunt also in [8] derived (1.1) in modeling magnetohydrodynamics surface waves. Hunt et al. [9] considered nonlinear potential free surface flows in the presence of vertical electric fields and obtain (1.1) when both the effects of gravity and surface tension are included in the dynamic boundary condition. When the KdV dispersive term \(u_{xxx}\) is ignored, (1.1) reduces to the two-dimensional Benjamin–Ono equation derived by Ablowitz and Segur [1] for internal waves in stratified fluids of large depth. See also [6]. In the absence of the BO term \(\beta {\mathscr {H}}u_x\), (1.1) is reduced to the classical KP equation that governs long dispersive weakly nonlinear waves which travel predominantly in the x-direction with weak transverse effects.
In comparison to the the full interfacial-wave equations, as was stated in [10], Eq. (1.1) describes almost uni-directional waves and it is not isotropic, so x is the preferred direction. This may seem to suggest that this model equation’s possible lump (localized solitary wave) solutions depend on the propagation direction which is strange in the physical relevance. In addition, solitary plane waves are unstable againt transverse perturbations. Numerical simulations for \(p=2\) indicate that this instability results in the formation of elevation lumps that tend to propagate stably, thus assuming the role of asymptotic states of the initial-value problem in two spatial dimensions. Furthermore, the mechanism of bifurcation of lumps and the transverse instability of solitary waves were formally obtained in [10]. Since lumps and plane solitary waves of elevation co-exist, it was shown that the latter are unstable to transverse perturbations, similar to what happens for the KP equation case.
In the present paper, we are interested in studying dynamical behavior of solitary waves of (1.1). By a solitary wave of (1.1) with the wave speed \(c>0\), we mean a solution of (1.1) of the form \(u(x,y,t)=\varphi (x-ct,y)\) decaying to zero at infinity. More precisely, \(\varphi \in X\) is a solution of
The aforementioned space X is defined as the closure of \(\partial _x(C_0^\infty ({{\mathbb {R}}^2}))\) under the norm
The space X was introduced in [5] for the KP equation. As noticed there, by using standard embedding theorems, one can see that, if \(u\in X\), there exists a unique, up to a constant, \(\varphi \in L_{\mathrm{loc}}^q({{\mathbb {R}}^2})\), \(2\le q \le 6\), such that \(u =\varphi _x\) and \(v = \varphi _y\). So, we take the norm in X:
We say that \(\varphi \in X\) is a solution of (1.2) if and only if \(S'(\varphi )=0\), where \(S(u)=E(u)+cF(u)\) with the energy and mass functionals
and
respectively, where
It is well-known that \({\mathscr {H}}\) commutates with \(\partial _x\), and for any f that (see [11]) \({{\mathscr {H}}\,f}(\xi )=(\mathrm{i}\xi {\hat{f}}(\xi )^\vee \), where \(\wedge \) and \(\vee \) denote the Fourier and inverse Fourier transforms, respectively. Moreover,
where \(\widehat{D_x^{1/2}f}(\xi )=|\xi |^{1/2}{\hat{f}}(\xi )\).
Zaiter in [16] used the concentration-compactness principle of Lions [12] and proved the existence of solitary waves of (1.1) for \(f(u)=u^2.\) He also showed that solitary waves are smooth and symmetric with respect to the transverse variable, and decay algebraically at infinity (see Remark 1.1). In [7] the authors showed that when \(\beta >0\), the Cauchy problem associated to (1.1) is locally well-posed in \(C([-T,T];H^s({\mathbb {R}}^2))\cap C^1([-T,T];H^{s-3}({\mathbb {R}}^2))\) for \(s\ge 3\). The results in [16] can be extended to the nonlinearity \(f(u)=u^p\) with \(1<p\le 5\) and \(\beta >-2\sqrt{c}\) by considering the minimization problem
where
and
with \(\lambda >0\). Notice that \(\Vert u\Vert _X^2\cong G(u)\). In [4], the authors considered the case \(\beta \ge 0\) and defined the minimization problem
where
and proved the minimum is achieved by \(\varphi \) which is a ground state. We recall that \(\varphi \) is a ground state solution of (1.2) if \(S'(\varphi )=0\) and \(S(\varphi )\le S(w)\) for any \(w\in X\) satisfying \(S'(w)=0\). Moreover, Chen et al. defined some submanifolds of X, including the homogeneous space \({\dot{X}}\) with the seminorm \(\Vert u\Vert _{{\dot{X}}}^2=\Vert u_x\Vert _{L^2({\mathbb {R}}^2)}^2+\beta \Vert D_x^{1/2}u\Vert _{L^2({\mathbb {R}}^2)}^2+\Vert v\Vert _{L^2({\mathbb {R}}^2)}^2\), which are invariant under the flow of the Cauchy problem associated to (1.1), and showed that the solitary waves of (1.1) are strongly unstable (see Definition 4.1) if \(\beta \ge 0\) and \(p\ge 2\). In this paper, we extend this result to \(\beta <0\) and \(p>7/3\). But (1.1), contrary to the KP equation (\(\beta =0\)), does not possess any scaling invariance, so that the techniques used in [13, 14] cannot be directly used. Another difficulty arises in the case \(\beta <0\) where the sign of the Pohozaev identity corresponding to the normalized solutions of (1.1) cannot be determined. Moreover, the semi-norm of \({\dot{X}}\) does not make sense when \(\beta <0\), because \(\beta \Vert D_x^{1/2}u\Vert _{L^2({\mathbb {R}}^2)}^2\) cannot be controlled. To overcome these difficulties, we will use the variational characterizations of the ground states of (1.1) by modifying the manifolds presented in [4] and show that the ground states of (1.1) are actually the Mountain-pass solutions of (1.1), and then we define some new invariant set to control the x-half-derivative of u and shown that the solitary waves of (1.1) are unstable by the mechanism of blow-up when the wave velocity c is sufficiently large.
Remark 1.1
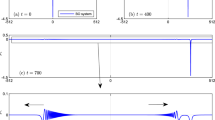
Due to the presence of the Benjamin-type term \({\mathscr {H}}u_{xx}\), the solitary waves have prominent oscillatory tails when \(\beta \) is close to \(-2\sqrt{c}\) and whose maximum excursion from the rest state decreases as \(\beta \) approaches \(-2\sqrt{c}\). See Fig. 1. The same phenomenon occurs for the Benjamin equation (see [1, 2, 10])
This suggests the instability of the solitary waves in this regime \(\beta <0\).

The projections of the solitary waves (1.1) on xz-plane (up) and the yz-plane with \(p=2\), \(c=1\) and \(\beta =-1.9,\cdots ,1.5\)
Theorem 1.2
Let \(p\in (7/3,5)\) and \(c>0\). Then there exists \(c_0>0\), depending on c, such that any ground state \(\varphi \) of (1.1) is strongly unstable when \(\beta >-c_0\).
The paper is organized as follows. After introducing some notation, in Sect. 2 we obtain the conditions under which existence and some variational characterizations of the solitary waves of (1.1) are assured. They will be important in our analysis of stability. Indeed, we show that Mountain-pass solutions of (1.2) are equivalent to the solutions obtained by the Nehari manifold in [4]. Section 3 is devoted to several minimization problems with multiple constraints to construct submanifolds of X that are invariant under the flow generated by the Cauchy problem associated to (1.1). In Sect. 4, we show that the solutions of (1.1) blows up in finite time if initial data is in some invariant sets must blow up in a finite time which shows in turn that the solitary waves of (1.1) if \(p > 7/3\) and \(\beta >c_0\) is strongly unstable.
Throughout this paper, we consider \(p=p_1/p_2\) where \(p_1\) is odd and \(p_2\) is even.
1.1 Notations
For \(s\in {\mathbb {R}}\), the nonhomogeneous Sobolev space is denoted by \(H^s\left( {\mathbb {R}}^2\right) \) and defined by
where
and \({\mathscr {S}}'\left( {\mathbb {R}}^2\right) \) denotes the space of tempered distributions. Define
with the norm
where '\(\vee \)’ is the Fourier inverse transform.
2 Existence and variational characterizations
In this section, we study the existence and some variational characterizations of the solitary waves of (1.1). They will be important in our analysis of stability.
Theorem 2.1
Equation (1.2) does not possess nontrivial solitary wave \(u=\varphi _x\in X\) satisfying \(u\in H^1({\mathbb {R}}^2)\cap L_\mathrm{loc}^\infty ({\mathbb {R}}^2)\) and \(\varphi _{yy}\in L_{\mathrm{loc }}^2({\mathbb {R}}^2)\) if one of the following cases holds:
-
(i)
\(c>0\), \(\beta \ge 0\) and \(p\ge 5\),
-
(ii)
\(c>0\), \(p>5\) and
$$\begin{aligned} \beta ^2 \le \left( \frac{4}{3p-7} \right) ^2(p-1)(p-5)\frac{c}{2}, \end{aligned}$$ -
(iii)
\(c\le 0\) and \(p\le 7/3\).
Proof
The proof follows from the standard truncation argument and the fact \(\int _{\mathbb {R}}xg{\mathscr {H}}g_x\mathrm{d}x=0\) and the following Pohozaev-type identities:
To obtain these identities, we multiplied formally (1.2) by u, \(xu_x\) and \(yu_y\) and use some integration by parts following [16]. After some straightforward calculations, we have
The result comes from the above Pohozaev identities. \(\square \)
Define the minimax value
with
Problem (2.6) indeed gives the mountain-pass solutions of (1.1). Recall from [3, 5] that the following anisotropic Sobolev-type inequality
holds and then the embedding
is continuous for any \(q\in [2,\infty )\), and is compact for \(q\in (2,\infty )\). It is worth noting by interpolation for any \(q\in [0,2(p-1)]\) with \(p+q\le 5\) that
By employing the mountain-pass lemma without the Palais–Smale condition [15] by using the above embedding and the fact \(G(u)\approxeq \Vert u\Vert _X^2\) for \(\beta >-2\sqrt{c}\), one can show that (1.1) has a nontrivial solitary wave through (2.6) for \(1<p\le 5\). We should notice for every \(u\in X\) that there is a unique \(t=t_u\) such that \(t_uu\in N\) (see (1.4)),
and \(t_u\) depends continuously only \(u\in X\). Indeed, it is obvious to see that \(t=t_u>0\) is only root of \( \frac{\mathrm{d}}{\mathrm{d}t}S(tu)=0\). Then, \(S>0\) on N. So we can observe from \(S(0)=0\) that \(S(t_uu)\) achieves its maximum in \(t_u\).
It is worth remarking that the uniqueness of ground states, modulo the symmetries, is still unknown. This is an challenging open problem (even when \(\beta =0\)). Indeed, since the uniqueness shows that the set of ground states of (1.1) matches with the orbit of any single ground state, the stability the set of ground states leads to orbital stability of the ground state.
In the following, we present some variational characterizations of the solitary waves which are useful in the instability analysis of solitary waves.
Recall the minimization problem (1.4).
Lemma 2.2
There exists a nontrivial minimizer u of (2.10). Moreover, u is a solitary wave solution of (1.1) and \(d_{MP}=d_+=d.\)
Proof
Existence of a nontrivial minimizer for (1.4) is similar to Theorem 2.5 in [4] with natural modification and using the fact \(G(u)\approxeq \Vert u\Vert _X^2\) for \(\beta >-2\sqrt{c}\).
To prove \(d_+=d=d_{MP}\), first we note that as K is subquadratic function at zero, we observe that I is positive in neighborhood \(B_r(0)\setminus \{0\}\subset X\). Thereby, \(I(\gamma (t))>0\), \(\gamma \in \Gamma \), for some \(t>0\). Now, we have for \(u\in X_+\) that
This means that if \(\gamma \in \Gamma \), then \(I(\gamma (t))<0\), and therefore crosses N. This shows that \(d_{MP}\ge d\). Now for \(u\in {X_+}\), we have \(K(tu)\ge Ct^\varrho \), for some \(C,\varrho >0\), if \(t>0\) is sufficiently large. This means for every \(u\in {X_+}\) that \(S(tu)<0\) for \(t\gg 1\). Hence, the half-axis \(\{tu\}_{t>0}\) generates an element of \(\Gamma \), that is \(d_{MP}\le d_+\). Finally assume that \(u\in {N}\). We have from definition of I that \(K(u)>0\) and \( \frac{d}{dt}K(tu)>0 \) provided \(t\ge p^{1/p}\). Hence, we have for \(t>0\) large enough that \(K(tu)>0\). The definitions of \(d_+\) and d show that \(d_+\ge d\). This completes the proof. \(\square \)
The following lemma was reported in [4, Proposition 2.8] for the case \(\beta \ge 0\). We give the proof for the sake of completeness.
Lemma 2.3
Let \(s\ge 3\) and \(\beta >-2\sqrt{c}\). Then there holds that \( d=\tilde{d}:= \inf _{u\in \tilde{{N}}}S(u)\) and
Proof
It is easy to see that \(\tilde{d}\ge d\). To show \(\tilde{d}\le d\), it is enough to prove for any \(\epsilon >0\) and any \({\tilde{u}}\in {N}\) that
We find from the density \(X_s\) into X that there is a sequence \(\{u_n\}\subset X_s\) such that \( w_n= {\tilde{u}}-u_n, \) where \(\lim _{n\rightarrow \infty }w_n=0\) in X. Since \(I({\tilde{u}})=0\), we know that
and
One can see from Lemma 2.2 that N is a nonempty manifold. Furthermore, it is uniformly bounded from below in X. Furthermore, for any \(0\ne u\in {X}\), there is a unique \(\zeta _u>0\) such that \(\zeta _uu\in {N}\). It can be also seen that \(\zeta _u\in (0,1)\), if \(I(u)<0\). Therefore, there exists a sequence \(\zeta _n\) (see 2.9) such that \(\zeta _nu_n\in \tilde{{N}}\) and \(\lim _{n\rightarrow \infty }\zeta _n=1\). Now, denote \({\tilde{u}}-w_n=\zeta _nu_n+(1-\zeta _n)u_n\). we have by comparing \(S({\tilde{u}})\) with \(S(\zeta _nu_n)\) that
Consequently, since \(\lim _{n\rightarrow \infty } w_n=0\) in X, then
and
And the proof of lemma is complete. \(\square \)
3 Invariant submanifolds
Now, in this section, we present some dynamical properties of the ground state solutions of (1.1) to construct several sets that are invariant under the flow generated by the Cauchy problem associated to (1.1).
First we should report the existence of local solution of the Cauchy problem associated with (1.1). This result was obtained by [7].
Theorem 3.1
Let \(s\ge 3\) and \(u_0\in X_s\). Then there exists \(T>0\) such that (1.1) has a unique solution u(t) with \(u(0)=u_0\) satisfying
and if \(\partial _x^{-2}(u_0)_{yy}\in L^2({\mathbb {R}}^2)\), one has
Moreover, if \(|y|u_0\in L^2({\mathbb {R}}^2)\), then \(|y|u\in L^\infty ((0,T);\,L^2({\mathbb {R}}^2))\). Furthermore, we have \(E(u(t))=E(u_0)\) and \(F(u(t))=F(u_0)\).
Define the following two submanifolds
where
and
Lemma 3.2
If \(\varphi \in X\) is a weak solution of problem (1.2), then \( Q_j(\varphi )= 0\), \(j=1,2\).
Proof
The identities \(Q_j(\varphi )=0\) are obtained by combining identities (2.1)–(2.3) after some straightforward computations. \(\square \)
The following variational characterization of the ground states of (1.1), based on cross-constrained submanifolds of X, will be vital to show the strong instability.
Lemma 3.3
Let \(p>7/3\), \(\beta >-c_0:=-\frac{4}{3}\sqrt{2c}\) and \(\varphi \) be a ground state of (1.2). Then \(Q_1(\varphi ) = 0\) and \(S(\varphi ) =\inf _{ u\in \Lambda _1} S(u)\), where
Proof
We show for any \(u\in \Lambda _1\) that there exists a path \(\omega \in \Gamma \) such that
Define \(u_\tau (x,y)=\tau ^{5/4} u(\tau ^{1/2}x,\tau y)\), where \(\tau >0\). One can see that
Moreover, \(\tau \mapsto S(u_\tau )\) increases for \(\tau \in (0,1)\), attains its maximum at \(\tau = 1\) and tends to \(-\infty \) on \((1,+\infty )\). More precisely, one can observe by some easy computations that
and
provided \(p>7/3\) and \(\beta >-c_0\) holds. Now by choosing \(\tau \) large enough to have \(S(u_\tau ) < 0\), we can define \(\gamma :[0,1]\rightarrow X\) by \(\gamma (t)=u_{t\tau }\) to obtain the desired path. \(\square \)
Lemma 3.4
Let \(p>7/3\), \(\beta >-c_0\) and \(\varphi \) be a ground state of (1.2). Then \(Q_2(\varphi ) = 0\) and \(S(\varphi ) =\inf _{ u\in \Lambda _2} S(u)\), where
Proof
The proof is analogous to the one of Lemma 3.3. For any \(u\in \Lambda _2\), to find the appropriate path in \(\Gamma \), we define \(u_\tau (x,y)=\tau ^{3/4} u(\tau ^{1/2}x, y)\), where \(\tau >0\). Next, we need to show that \(\tau \mapsto S(u_\tau )\) increases for \(\tau \in (0,1)\), tends to \(-\infty \) on \((1,+\infty )\) and achieves its maximum at \(\tau = 1\). But the conditions \(p>7/3\) and \(\beta >-c_0\) assure that
and
The path \(\gamma :[0,1]\rightarrow X\), by \(\gamma (t)=u_{t\tau }\), is what we need, if we \(\tau \) is sufficiently large to have \(S(u_\tau ) < 0\). \(\square \)
Remark 3.5
One can easily see that
where \(S_j^-=S-4q_jQ_j\),
and
In the following, one can see the equivalence between the ground states and the minimizers of Lemmas 3.3 and 3.4. The proof proceeds along the same lines of the proof of Lemma 2.11 in [13] with essential modifications, and we omit it.
Proposition 3.1
Let \(p>7/3\) and \(\beta >-c_0\). Then \(\varphi \in X\) is a ground state of (1.1) if \(\varphi \in \Lambda _j\) and \(S(\varphi ) =\inf _{ u\in \Lambda _j} S(u)\) with \(j=1,2\).
Remark 3.6
It is worth noting that the converse of the above proposition holds. Actually, if a solitary wave is obtained by minimizing the action S on the submanifold \(\Lambda _j\), then it is really a ground state.
Next we define for \(j=1,2\) the sets
and
The following lemma shows that these sets are invariant under flow generated by (1.1) which will be important to obtain the blow-up result.
Lemma 3.7
Let \(s\ge 3\), \(\beta >-c_0\) and \(p>7/3\). Suppose that the solution \(u(t)\in C([0,T);X_s)\) with some \(T > 0\), is a solution of (1.1) with initial data \(u_0\in X_s\) satisfying \(F(u(t)) = F(u_0 )\) and \(E(u(t)) = E(u_0)\) for \(0\le t < T\). Then \(u(t)\in Q_j^\pm \) for any \(t\in [0,T)\), if \(u_0\in Q_j^\pm \) for \(j=1,2\). Moreover, if \(u_0\in Q_1^-\), then \(Q_1(u(t))<-\rho \) for \(0\le t<T\), where
Proof
We only show that that \(Q_1^-\) is invariant under the flow generated by the initial value problem associated to (1.1). The proofs of invariance of the other sets are similar. Suppose that u(t) with \(t\in [0,T)\) is the solution of (1.1) with the initial data \(u(0)=u_0\). Since \(u_0\in Q_1^-\), then \(d>S(u(t))\) for all t by Theorem 3.1. Now suppose \(Q_1(u(t_0))\ge 0\) for some \(t_0\in (0,T)\). As \(Q_1\) is continuous with respect to t, then we have that \(Q_1(u(t_1))=0\) for some \(t_1\in (0,t_0]\); and thus \(u(t_1)\in \Lambda _1^-\). Finally Remark 3.5 and Lemma 3.3 gives the contradiction \(d>S(u(t_1))\ge \inf _{u\in \Lambda _1^-}S(u)=d\).
Now suppose \(u_0\in Q_1^-\cap Q_2^+\). Then we have \(u(t)\in Q_1^-\cap Q_2^+\), i.e. \(S(u(t)) < S(\varphi )\) and \(Q_1(u(t)) <0\le Q_2(u(t))\) for \(t\ge 0\). Since \(Q_1(\tau u)>0\) for some sufficiently small \(\tau >0\), there exists \(\tau _0\in (0,1)\), such that \(Q_1(\tau _0u) = 0\) and
where
Then,
\(\square \)
4 Strong instability
In this section, we show that the ground states of (1.1) is strongly unstable. First we recall the definition of the strong instability.
Definition 4.1
We say that a solitary wave \(\varphi \) to (1.1) is strongly unstable if, for all \(\delta > 0\), there exists \(u_0\in X_s\) (\(s\ge 3\)) such that \(\Vert u_0-\varphi \Vert _{{X}}<\delta \) and the solution u(t) of (1.1) with initial data \(u(0)=u_0\) blows up in finite time in the space X.
Theorem 4.1
Let \(p> 7/3 \), \(\beta >-c_0\) and \(u_0\in Q_1^-\cap Q_2^+\). Suppose that the solution u(t) is a solution (1.1) with the initial data \(u(0) = u_0\), then u(t) blows-up in finite time, that is
for some \(0< \tau <\infty \).
Proof
If u(t) remains in X, we define
where u is the solution of (1.1). Similar to [4], one can employ Theorem 3.1 to show that the virial identity
holds. It follows from Lemma 3.7 that
where \(\rho \) is as in (3.6). Therefore, it follows that \(I(\tau )=0\) for some \(\tau <\infty \), and the blow-up result can be deduced by combining the conservation law \(F(u(t))=F(u_0)\) and the classical Weyl-Heisenberg inequality. \(\square \)
Remark 4.2
One can easily observe when \(u_0\in Q_2^+\) that the energy of initial data is positive if \(p>7/3\).
If \(u_0\in Q_1^+\), then the conservation laws imply that the solution u(t) of (1.1) remains globally in X for \(t\ge 0\).
Proposition 4.1
Let \(\beta >-c_0\) and \(u_0\in Q_1^+\). Then the solution u(t) in Theorem 3.1 exists globally in time.
Proof
First we note that \(Q_1^+\ne \emptyset \). Let \(u_0\in Q_1^+\) and u(t) be the corresponding solution of (1.1) for \(t\in [0,T)\) with the initial data \(u_0\). Suppose by contradiction that \(T<+\infty \). Then by Theorem 3.1,
It follows from the conservation laws E and F in \(0\le t<T\) that
provided \( \beta >-c_0, \) where \(g_j(p)\) are the same as (3.7). Thus, we deduce from (4.3) that
By continuity, we infer that there is \(t_0\in (0,T)\) such that \(Q_1(u(t_0))=0\). The conservation laws imply that \(E(u(t_0))\ge d\). This contradicts the fact \(E(u(t))=E(u_0)<d\). \(\square \)
The following lemma suggests suitable initial data, near to the solitary wave, to construct blow-up solutions. The proof is similar to one of Lemma 5.4 in [4].
Lemma 4.3
Let \(\beta >-c_0\), \(p>7/3\). Suppose that \(\varphi \) is a ground state of (1.1) such that \(\varphi _y=\psi _x\). Then there exists \(\theta _1>0\) and \(\theta _2>0\) such that for \(w_{\theta _1,\theta _2}(x,y)=\theta _1\varphi (x,\theta _2y)\),
Proof
Let \(\varphi \) be a ground state solution of (1.1). First, by some straightforward computations (see (2.1)–(2.3)), one has
and
On the other hand, we have
Reciprocally, by some computations and using (4.5) and (4.7), we obtain that the conditions (4.4) are equivalent to conditions
and
where
Thus, conditions (4.11) and (4.12) are equivalent to
Consequently, by taking \(\theta _2^{2}=1-\epsilon \), where \(\epsilon >0\) is small enough such that \( \theta _1^p\in (\theta _1^*,1)\) with
the conditions (4.4) hold for \(w_{\theta _1,\theta _2}\). This completes the proof. \(\square \)
Before proving Theorem 4.1, we need the following lemma.
Lemma 4.4
Suppose that u and w are in X such that \(\Vert w\Vert _ {X}\le C\), there exist the constants \(C_1\), \(C_2\) and \(C_3\), independent of u, such that
and
Proof
First, note from the inequality,
and embedding (2.8) that
Hence, by using
and
we have that
and this completes (4.14). Inequalities (4.15) and (4.16) can be proved similarly. \(\square \)
Now, we are able to prove our main result.
Proof of Theorem 1.2
Let \(\delta >0\) be fixed. Assume that \(0<\varepsilon \ll 1\), and \(\theta _2\), \(\theta _1\) and \(w_{\theta _1,\theta _2}\) are as in Lemma 4.3 such that
By the density \(X_s\hookrightarrow X\), we can find \(u_0\in X_s\) such that
where \(C_1\), \(C_2\) and \(C_3\) are defined in the proof of Lemma 4.4 and
Therefore, we deduce that
This means from Lemmas 4.3 and 4.4 that \(u_0\in {Q}_1^- \cap Q_2^+\). Consequently, the solution u(t) of the generalized two-dimensional Benjamin equation (1.1) with the initial data \(u(0)=u_0\) blows up in a finite time by Theorem 4.1. \(\square \)
References
Ablowitz, M.J., Segur, H.: Long internal waves in fluids of great depth. Stud. Appl. Maths. 62, 249–262 (1980)
Albert, J.P., Bona, J.L., Restrepo, J.M.: Solitary waves solutions of the Benjamin equation. SIAM J. Appl. Math. 59, 2139–2161 (1999)
Besov, O.V., Il’in, V.P., Nikolskii, S.M.: Integral representations of functions and imbedding theorems, I. Wiley, New York (1978)
Chen, J., Guo, B., Han, Y.: Blow up and instability of solitary wave solutions to a generalized Kadomtsev–Petviashvili equation and two-dimensional Benjamin–Ono equations. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 464, 49–64 (2008)
de Bouard, A., Saut, J.-C.: Solitary waves of generalized Kadomtsev–Petviashvili equations. Ann. Inst. H. Poincaré Anal. Non Linéaire 14, 211–236 (1997)
Esfahani, A.: Remarks on solitary waves of the generalized two dimensional Benjamin–Ono equation, Applied. Math. Comput. 218, 308–323 (2011)
Guo, B., Han, Y.: Remarks on the generalized Kadomtsev–Petviashvili equations and two dimensional Benjamin–Ono equations. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 452, 1585–1595 (1996)
Hunt, M.J.: Two-dimensional surface waves in magnetohydrodynamics. J. Plasma Phys. 85, 905850405 (2019)
Hunt, M.J., Vanden-Broeck, J.M., Papageorgiou, D.T., Parau, E.I.: Benjamin-Ono Kadomtsev–Petviashvili’s models in interfacial electro-hydrodynamics. Eur. J. Mech. B. Fluids 65, 459–463 (2017)
Kim, B., Akylas, T.R.: On gravity-capillary lumps. Part 2. Two-dimensional Benjamin equation. J. Fluid Mech. 557, 237–256 (2006)
Linares, F., Ponce, G.: Introduction to nonlinear dispersive equations, 2nd edn. Springer, New York (2015)
Lions P. -L.: The concentration-compactness principle in the calculus of variations. The locally compact case. I and II. Ann. Inst. H. Poincaré, Anal. Non Linéaire, 1, 109–145 and 223–283 (1984)
Liu, Y.: Blow up and instability of solitary waves to a generalized Kadomtsev–Petviashvili equation. Trans. Am. Math. Soc. 353, 191–208 (2001)
Liu, Y.: Strong instability of solitary-wave solutions to a Kadomtsev–Petviashvili equation in three Dimensions. J. Differ. Equ. 180, 153–170 (2002)
Willem, M.: Minimax theorems, progress in nonlinear differential equations and their applications 24. Birkhäuser Boston Inc, Boston (1996)
Zaiter, I.: Solitary waves of the two-dimensional Benjamin equation. Adv. Differ. Equ. 14, 835–874 (2009)
Acknowledgements
This work was supported by the Social Policy Grant (SPG) funded by Nazarbayev University, Kazakhstan.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Esfahani, A. Instability of solitary waves of two-dimensional Benjamin equation. Rend. Circ. Mat. Palermo, II. Ser 72, 1437–1452 (2023). https://doi.org/10.1007/s12215-022-00738-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12215-022-00738-7