
Abstract
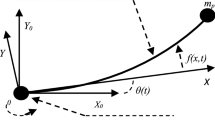
Manipulators used for the transportation of large panel-shape payloads often adopt long and slender links (or forks) with translational joins to carry the payloads. As the size of the payload increases, the length of the links also increases to hold the payload securely. The increased length of the link inevitably amplifies the effect of the flexure in the link. Intuitively, the translational motion of the link in its longitudinal direction should have no effect on the lateral vibration of the link because of the orthogonality between the direction of the translational motion and the lateral vibration. If, however, the link was flexible and translated horizontally (perpendicular to the gravitational field) the asymmetric deflection of the link caused by gravity would break the orthogonality between the two directions, and the longitudinal motion of the link would excite lateral motion in the link. In this paper, the lateral oscillatory motion of the flexible link in a large-scale solar cell panel handling robot is investigated where the links carry the panel in its longitudinal direction. The Newtonian approach in conjunction with the assumed modes method is used for derivation of the equation of motion for the flexible forks where non-zero control force is applied at the base of the link. The analysis illustrates the effect of longitudinal motion on the lateral vibration and dynamic stiffening effect (variation of the natural frequency) of the link due to the translational velocity. Lateral vibration behavior is simulated using the derived equations of the motion. A robust vibration control scheme, the input shaping filter technique, is implemented on the model and the effectiveness of the scheme is verified numerically.
Article PDF
Similar content being viewed by others


Avoid common mistakes on your manuscript.
References
T. Kane, R. Ryan and A. Banerjee, Dynamics of a cantilever beam attached to a moving base, Journal of Guidance Control Dynamics, 10 (2) (1987) 139–151.
S. H. Hyun and H. H. Yoo, Dynamic modelling and stability analysis of axially oscillating cantilever beams, Journal of Sound and Vibration, 228 (3) (1999) 543–558.
H. H. Yoo, R. R. Ryan and R. A. Scott, Dynamics of flexible beams undergoing overall motions, Journal of Sound and Vibration, 2004, 181 (2) (1995) 261–278.
S. F. Xiao and B. Chen, Dynamic characteristic and stability analysis of a beam mounted on a moving rigid body, Journal of Applied Mechanic, 74 (5–6) (2005) 415–426.
J. Rhu, S.-S. Kim and S.-S. Kim, Flexible multibody dynamic system simulation, Computers and Structures, 62 (6) (1997) 1035–1048.
M. Vakil, E. Sharbati, A. Vakil, F. Heidari and R. Fotouhi, Vibration analysis of a Timoshenko beam on a moving base, Journal of Vibration and Control, 0 (0) 1–18.
B. Pratiher, Vibration control of a transversely excited cantilever beam with tip mass, Journal of Applied Mechanic, 82 (1) (2011) 31–42.
A. Yigit, R. Scott and G. Ulsoy, A, Flexural motion of a radially rotating beam attached to a rigid body, Journal of Sound and Vibration, 121 (2) (1988) 201–210.
A. M. Bloch, Stability analysis of a rotating flexible system, Journal of Acta Applicandae Mathemeticae, 15 (3) (1989) 211–234.
S. B. Choi, C. C. Cheong and H. C. Shin, Sliding mode control of vibration in a single-link flexible arm with parameter variation, Journal of Sound and Vibration, 179 (5) (1995) 737–748.
J. B. Yang, L. J. Jiang and D. C. Chen, Dynamic modeling and control of a rotating Euler-Bernoulli beam, Journal of Sound and Vibration, 274 (3–5) (2004) 863–875.
S. Bai, P. Ben-Tzvi, Q. Zhou and X. Huang, Dynamic modeling of a rotating beam having a tip mass, ROSE 2008 IEEE (2008) 17–18.
A. K. Banerjee and J. M. Dickens, Dynamics of an arbitrary flexible body in large rotation and translation, Journal of Guidance, 13 (2) (1990) 221–227.
F. J. Shaker, Effect of axial load on mode shapes and frequencies of beams, Lewis Research Center Report NASA (1975).
A. Bokaian, Natural frequencies of beams under compressive axial loads, Journal of Sound and Vibration, 126 (1) (1988) 49–65.
H. Ding and L.-Q. Chen, Natural frequencies of nonlinear vibration of axially moving beams, Journal of Nonlinear Dynamics, 63 (1–2) (2011) 125–134.
N. C. Singer and W. P. Seering, Preshaping command inputs to reduce system vibration, J. of Dynamic Systems, Measurement, and Control, 112 (1) (1990) 76–82.
D. P. Magee and W. J. Book, Experimental verification of modified command shaping using a flexible manipulator, International Conference on Motion and Vibration Control, Japan (1992) 553–558.
W. Singhose, L. J. Porter and N. C. Singer, Vibration reduction using multi-hump extra-insensitive input shapers, Proceedings of the American Control Conference, Seattle (1995).
W. Singhose, L. Porter, T. D. Tuttle and N. C. Singer, Vibration reduction using multi-hump input shapers, Journal of Dynamic Systems, Measurement, and Control, 119 (2) (1997) 320–326.
S. Rhim, N. Sadegh and W. J. Book, Combining a multirate repetitive learning controller with command shaping for improved flexible manipulator control, Journal of Dynamic Systems, Measurement, and Control, 123 (3) (1999) 385–390.
S. Rhim and W. J. Book, Adaptive time-delay command shaping filter for flexible manipulators, IEEE/ASME Transactions on Mechatronics, 9 (4) (2004) 619–626.
W. Singhose, L. Porter, M. Kenison and E. Kriikku, Effects of hoisting on the input shaping control of gantry cranes, Journal of Control Engineering Practice, 8 (10) (2000) 1159–1165.
W. Singhose, Command shaping for flexible systems: A review of the first 50 years, Journal of Precision Engineering and Manufacturing, 10 (4) (2009) 153–1.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Editor Yeon June Kang
Heonseop Shin received his B.S. and M.S. degrees (with highest honor for M.S.) in Mechanical Engineering from Kyung Hee Univ., Korea, in 2012 and 2014, respectively. He is currently a doctoral student at the Dept. of Mechanical Engineering in Kyung Hee Univ., Korea. His research interests are theoretical studies in flexible link vibration analysis, vibration control and contact mechanics.
Sungsoo Rhim received his B.S. and M.S. degrees in Mechanical Engineering from Seoul National Univ., Korea, in 1990 and 1992, respectively. He received his Ph.D. degree in mechanical engineering from Georgia Institute of Technology in 2000. He is currently an Associate Professor at the Dept. of Mechanical Engineering in Kyung Hee Univ., Korea. His research interests include system dynamics and control of robotic systems.
Rights and permissions
About this article

Cite this article
Shin, H., Rhim, S. Modeling and control of lateral vibration of an axially translating flexible link. J Mech Sci Technol 29, 191–198 (2015). https://doi.org/10.1007/s12206-014-1226-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-014-1226-8