
Abstract
In this paper, a new adaptive upwind finite difference method based on the arc-length equidistribution principle is studied for solving the general linear singularly perturbed convection-reaction-diffusion two-point boundary value problem. Under the discrete comparison principle and its derived properties, the a posteriori error estimate of the upwind finite difference scheme on an arbitrary mesh is obtained by using a linear interpolation, the existence of the solution of the adaptive upwind finite difference method is proved without the presupposition, and the boundedness of the arc-length of the numerical solution and then the uniform first-order convergence of the adaptive upwind finite difference method are achieved by the discrete Green’s function. Finally, the proposed method is verified to be uniformly first-order convergent and is compared with the existing method in numerical examples
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The numerical methods for solving singularly perturbed problems are often concerned and have been developed for decades (see [1,2,3,4,5]). Besides fitted operator numerical methods on the uniform mesh (see [1, 2, 5, 6]), two strategies are commonly used to solve these problems on the non-uniform mesh. One strategy is to use layer-adapted grid methods, i.e., numerical methods on a priori layer-adapted meshes, such as Bakhvalov-type meshes and Shishkin-type meshes (see [1, 2, 4, 5, 7,8,9,10]). Another strategy is to use adaptive grid methods, i.e., numerical methods on adaptive meshes. The application of the adaptive grid gets rid of the limitation of a priori knowledge of the exact solution, only needs to find a monitor function to help optimize the grid continually (see [1, 3, 5, 11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28]). The monitor function is defined in terms of the local error (or the local residual) or the arc-length of the solution and so on. Because the construction of the adaptive grid (or the moving mesh) does not depend on the properties of the exact solution, the progresses on the convergence analysis of the adaptive grid method based on the arc-length monitor function have been made gradually almost only for the special cases (see [14,15,16,17,18,19,20,21]), but seldom for the general linear non-conservative case (see [22,23,24,25,26]).
We consider the general linear singularly perturbed convection-reaction-diffusion problem in the non-conservative form:
where \(0<\varepsilon \ll 1\) is a sufficiently small positive perturbation parameter, p, q and f are sufficiently smooth functions, \(0<\beta \le p(x)\le \beta ^*\), \(|p'(x)| \le C_p\), \(0\le q(x)\le \gamma ^*\) and \(| q'(x)| \le C_q\) for \(x\in [0,1]\), \(\beta , \beta ^*, \gamma ^*, C_p\) and \(C_q\) are constants, and C is a generic positive constant, independent of the perturbation parameter \(\varepsilon \). The problem has a unique solution u that has an exponential boundary layer at \(x=0\).
This problem (1) was solved by the upwind finite difference scheme on the arc-length equidistribution mesh as follows (see [22,23,24,25]):
where \(h_i=x_i-x_{i-1},\quad D^-u_i=\frac{u_i-u_{i-1}}{h_i},\quad D^+u_i=\frac{u_{i+1}-u_i}{h_{i+1}}\) and \(DD^-u_i=\frac{2(D^-u_{i+1}-D^-u_i)}{h_{i+1}+h_{i+1}}\).
The development of related adaptive methods and their convergence analysis are reviewed in the following.
-
(i)
In the early days, for the non-conservative homogeneous linear case \(-\varepsilon u'' (x)-p(x) u'(x)=0\), the convergence of the upwind finite difference scheme on the grid equidistributing the monitor function \(M(x, u(x))=|u'(x)|^{1/m}\) and \(\sqrt{1+(u'(x))^2}\) of the exact solution u was obtained by using the a priori truncation error in [11,12,13,14]. For the non-homogeneous case \(-\varepsilon u'' (x)-p(x) u'(x)=f(x)\), the convergence of the upwind finite difference scheme by using \(M(x, u(x))=\alpha + |u''(x)|^{1/m}\) of the exact solution u was obtained by the a priori truncation error in [15]. For the reaction-diffusion case \(-\varepsilon u'' (x)-b(x) u(x)=f(x)\), the convergence of the central finite difference scheme using \(M(x, u(x))=\alpha + |w''(x)|^{1/m}\) (w is the layer component of u) was obtained by the a priori truncation error in [16]. For the conservative quasilinear case \(-\varepsilon u'' (x)-b(x, u)'=f(x)\), the first-order convergence of the simple upwind finite difference scheme using monitor functions based on a priori information of the exact solution was also obtained in [17].
-
(ii)
In fact, to devise a rigorous analysis of any adaptive algorithm, the first ingredient one needs is an a posteriori bound on the error of the computed solution (see §I.2.5 in [1]). For the conservative quasilinear case \(-\varepsilon u'' (x)-b(x, u)'=f(x)\), the convergence of the simple upwind finite difference scheme on the adaptive mesh equidistributing the numerical arc-length monitor function \(M(x, u^N(x))=\sqrt{1+((u^N(x))')^2}\) was firstly analyzed by the a posteriori truncation error in [18]. Its uniform first-order error bound was obtained by using the Green’s function, since the conservative equation could easily be reduced to the first-order equation (see [1, 18, 19]). The numerical solution of the above problem was also calculated by equidistributing a monitor function of discrete second-order derivatives in [20].
-
(iii)
Afterwards, the special case \(-\varepsilon u'' (x)-p(x) u'(x)=0\) was solved by the simple upwind scheme on the adaptive mesh equidistributing the numerical arc-length monitor function \(M(x, u^N(x))\). By using some techniques developed in [18], the existence of the adaptive solution was proved with a strong grid assumption \(h_i/h_{i+1} \le 1\), and the uniform first-order convergence was obtained by the a posteriori error estimation and using a quadratic interpolation of the numerical solution (see [21]).
-
(iv)
However, the uniform first-order convergence of (2) for the general case \(-\varepsilon u''(x)-p(x)u'(x)+q(x)u(x)=f(x)\) was proved in [22] by the a priori truncation error and the grid properties obtained in [14] for the special case \(-\varepsilon u'' (x)-p(x) u'(x)=0\), but not the a posteriori error estimate and not free from the properties of the exact solution. The uniform first-order convergence of (2) for singularly perturbed mixed boundary value problems was derived in [23] also by a priori truncation error, the properties of the exact solution and the grid properties obtained in [14].
-
(v)
In the later, by developing the techniques in [21], the existence of the numerical solution of (2) for the general problem (1) on the adaptive mesh equidistributing the numerical arc-length monitor function \(M(x, u^N(x))\) was proved by a slightly weakened grid restriction \(h_i/h_{i+1} \le C\), and the uniform first-order convergence was obtained by the a posteriori error estimation and also the quadratic interpolation of the numerical solution for (1) in [24].
-
(vi)
Further, the quadratic interpolation was replaced by a linear interpolation in the error analysis of (2) for (1) in [25] and also of a similar scheme for a singularly perturbed differential difference equation with small delay in [26]. However, the uniform first-order convergence in [25, 26] was obtained by citing [24] and [18, 21] respectively, where the quadratic interpolation and the impractical condition \(h_i/h_{i+1} \le C\) or the conservative equation were used, but without any proof of the existence of numerical solution and the boundedness of the arc-length of the numerical solution.
-
(vii)
Recently, for the reaction-diffusion singularly perturbed boundary value problem \(-\varepsilon u'' (x)+a(x) u(x)=f(x)\) of robin-type, the spline difference method on the a posteriori layer adapted mesh by using the monitor function \(M(x, u(x))=\alpha + |w''(x)|^{1/m}\) (see also [16] was discussed in [27]. A posteriori error analyses for the system of reaction-diffusion problems, the nonlinear singularly perturbed system of delay differential equations and the singularly perturbed nonlinear parameterized problem were also discussed in [28,29,30]. The algorithm and its extension for the system of mixed type reaction diffusion problems and several singularly perturbed parabolic problems were developed in [31,32,33,34,35].
The stability of T in (1) was derived in Corollary 4.2 in [24] as follows:
Lemma 1.1
(see [24]) Let \(F(x)=\int _x^1 f(s) d s +c_0\) be a bounded piecewise continuous function. Then, there exists a unique weak solution \(u \in H_0^1(0, 1)\) for the problem (1), such that
where \(C_1=C(2 \exp (\gamma ^*/\beta ) + \beta ^*/\beta )/\beta ^2+C\), and
Actually, the stability (3) can also be proved under the condition \(q\ge 0\) and \(q+p'\ge 0\) by the derivation for Theorem 1.7 in §I.1.1.2 in [1].
In this paper, we investigate a new upwind finite difference scheme different from (2) on the adaptive mesh equidistributing the numerical arc-length monitor function \(M(x, u^N(x))\) to solve the general non-conservative non-homogeneous convection-reaction-diffusion problem (1). In Section 2, the a posteriori error estimate for the upwind finite difference scheme on an arbitrary mesh is obtained by the stability of T and a linear interpolation of \(u^N\). In Section 3, the adaptive upwind finite difference method is proposed and the existence of the solution is proved by the fixed point theorem without the grid restriction \(h_i/h_{i+1} \le 1\) or C. In Section 4, the boundedness of the arc-length of the numerical solution and then the uniform first-order convergence are derived by using the property of the discrete Green’s function. Finally, in Section 5, the adaptive method is compared with the existing method and shown to be effective and uniformly first-order convergent in the numerical examples.
2 The upwind finite difference scheme and its a posteriori error estimate
For any nodes on interval [0, 1], \(0=x_0<x_1<...< x_n=1\), we investigate a new simple upwind finite difference scheme as follows:
where \(h_i=x_i-x_{i-1}, D^-u_i=\frac{u_i-u_{i-1}}{h_i}, D^+u_i=\frac{u_{i+1}-u_i}{h_{i+1}}\) and then \(D^+(D^-u_i)\) \(=\frac{D^-u_{i+1}-D^-u_i}{h_{i+1}}\). The simple upwind scheme (5) when \(h_i=h\) gives the simple upwind scheme (2.12) in §I.2.1.2 in [1] and is much similar to the scheme \(-D^+(\varepsilon D^-u_i^N + b(x_i, u^N_i))= f_i \) in [17,18,19,20] and the scheme in [8,9,10], but different from the usually adopted classical simple upwind scheme (2) in [7, 11,12,13,14,15, 21,22,23,24,25,26]. And it is also different from the central difference scheme to avoid oscillations of it, see e.g. the central difference scheme (2.3) in §I.2.1.1 and the discussion in §I.2.1.2 in [1].
Since \(T^N u_i^N = -\frac{\varepsilon }{h_{i}h_{i+1}}u^N_{i-1}+(\frac{\varepsilon }{h_{i}h_{i+1}} +\frac{\varepsilon }{h_{i+1}h_{i+1}}+\frac{p_i}{h_{i+1}}+q_i)u^N_i -(\frac{\varepsilon }{h_{i+1}h_{i+1}}+\frac{p_i}{h_{i+1}})u^N_{i+1}\), the matrix of \(T^{N}\) of the scheme (5) is diagonally dominant and has non-positive off-diagonal entries. Thus, the matrix is an M-matrix. Let \(\Psi ^\pm _i=\frac{1}{\beta }(1-x_i)\Vert T^N u^N_i \Vert _\infty \pm u^N_i \). Then
\(\Psi ^\pm _0\ge 0\) and \(\Psi ^\pm _N\ge 0.\) So, by the discrete comparison principle, \(\Psi ^\pm _i\ge 0\), i.e., \(T^{N}\) is uniformly stable (cf. Lemma 2.11 in §I.2.1 in [1]):
For any \( x\in I_{i}=(x_{i},x_{i+1})\), \(i=0,\dots , N-1\), we have a piecewise constant function \(f^N(x)=f_{i}\) and a piecewise linear interpolation
which satisfies \(u^N(x_i)=u_i^N, u^N(x_{i+1})=u_{i+1}^N\) and \((u^N(x))'=D^+u_i^N\). Alternatively, a quadratic interpolation was used in [21,22,23,24].
For any \( x\in I_{i}=(x_{i},x_{i+1})\), \(i=0,\dots , N-1\), we have
And owing to Lemma 1.1, (1) and (4), we have
Since the items of the right-hand side satisfy:
we have
and then
Theorem 2.1
Let u(x) be the solution of (1) and \(u^N_i\) be the solution of (5) on an arbitrary mesh. Then there exists a constant C such that:
Proof
Let \(u^N(x)\) be the piecewise linear interpolation of \(u_i^N\). From (8), we have
\(\square \)
3 The adaptive upwind FDM and the existence of its solution
The problem (1) is solved iteratively by the adaptive upwind finite difference method:
-
Step 1.
Set an initial mesh \(\{x_i^{(0)}\}\), e.g., a uniform mesh \(\{0, \frac{1}{N}, \frac{2}{N},..., 1\}\) or a Shishkin-type mesh.
-
Step 2.
For \(k = 0, 1,...\), compute the numerical solution \(\{u_i^{(k)}\}\) by (5) on the current mesh \(\{x_i^{(k)}\}\), and set \(l_i^{(k)}=\sqrt{(x_i^{(k)} - x_{i-1}^{(k)})^2+(u_i^{(k)}-u_{i-1}^{(k)} )^2}\) and \(L^{(k)}=\sum _{j=1}^{N} l_i^{(k)}\).
-
Step 3.
Take a user-chosen constant \(C_0 \ge 1\). If the condition
$$\begin{aligned} \frac{\max _{1\le i \le N} l_i^{(k)}}{L^{(k)}} \le \frac{C_0}{N} \end{aligned}$$(9)is satisfied, then set \(\{x_i^*\} = \{ x^{(k)}_i \}\), \(u^*= u^{(k)}\) and stop. Otherwise, continue to the next step.
-
Step 4.
Set the next mesh \(0 = x_0^{(k+1)}< x_1^{(k+1)}<... < x_N^{(k+1)} = 1\) by equidistributing the arc-length of the polygonal curve of the numerical solution \(u^{(k)}(x)\), such that
$$\begin{aligned} l_i^{(k+1)}=\sqrt{(x_i^{(k+1)} - x_{i-1}^{(k+1)})^2+(u^{(k)}(x_i^{(k+1)})-u^{(k)}(x_{i-1}^{(k+1)}))^2}=\frac{L^{(k)}}{N}. \end{aligned}$$Return to step 2. Similar to the contents in [18, 21, 24,25,26], but the equation (1) is different from those in [18, 21, 26] and the scheme (5) is different from that in [18, 21, 24,25,26], the above adaptive method for (1) constructs a mapping, and its existence theorem also follows the fixed point theorem, which only demands the following newly proved preliminary lemma without using the presupposition \(h_i/h_{i+1} \le 1\) or C used in [21, 24,25,26].
Lemma 3.1
The solution \(\{u^N_i \}\) by (5) for (1) on an arbitrary mesh \(\{x_i \}\) satisfies
where C a constant independent of \(\varepsilon \) and N.
Proof
From (6), \(|u^N_i| \le C\) for each i. So, \(h_k \ge N^{-1}\) and \(|D^-u_k^N| \le C N\) for some k.
For \(i=k, k+1,..., N-1\), from (5) we have
For \(i=1, 2,..., k-1\), from (5) we have
We also have
\(\square \)
We need to prove that there exists a solution by (5) satisfying the equations:
Theorem 3.2
(Existence of a solution of the adaptive upwind FDM) For any \(\varepsilon \in (0, 1)\) and every positive integer N, there exists a mesh equidistributing the arc-length (10) along the piecewise linear interpolation of the solution of (5).
Proof
Let us regard steps 2 and 4 of the algorithm as a mapping: \(\Psi : (h_1, h_2,..., h_N) \rightarrow (\tilde{h}_1, \tilde{h}_2,..., \tilde{h}_N)\), where \(h_i\) and \(\tilde{h}_i\) are of the mesh before and after moving it. Define a set
where \(Q = Q(\varepsilon , N)\) satisfies \(0<Q< \frac{1}{N}\). Clearly, \(S_Q\) is not empty. Let \({u^N_i }\) be the numerical solution from (5) on the mesh with the step size \(h_i\) and set \(l_i = h_i\sqrt{1 + |D^-u^N_i|^2}\) \((i=1, 2,..., N)\). From Lemma 3.1 the slope of each segment of \(u^N (x)\) is at most \(C(N + \varepsilon ^{-1})\), so the arc-length of \(u^N (x)\) on each interval of the new mesh with length \(\tilde{h}_i\) for every i is at most \(\tilde{h}_i\sqrt{ 1 + C(N + \varepsilon ^{-1})^2}\). Since the new mesh is taken to split the piecewise linear function \(u^N (x)\) into N pieces, we have
which leads to
Hence \(0< Q < \frac{1}{N}\) and then \(\Psi \) maps \(S_Q\) into itself.
The nonempty set \(S_Q\) is compact and convex, and \(\Psi \) is obviously continuous. So, \(\Psi \) has a fixed point in \(S_Q\) by the Brouwer fixed point theorem, i.e., there is a mesh, as well as a computed solution on it, such that \(l_i = l_j\) for all i and j. \(\square \)
4 The uniform first-order convergence of the adaptive upwind FDM
Define the discrete Green’s function \(G(x_i,x_j)\) of \(T^N\) in (5) as follows:
and \(G_{0,j}=G_{N,j}=0,\) for \( j=1, 2, \dots , N-1\), where
Thus, the numerical solution \(u_i^N\) has the expression
which satisfies (5).
Similar to the property of the discrete Green’s functions in [1, 16, 18, 21, 24], we can prove the following property:
Lemma 4.1
The discrete Green’s function \(G(x_i,x_j)\) in (11) satisfies:
and
Proof
Let the barrier function for \(G_{i,j}\) be (see, e.g., [1, 16, 18]):
For \(i=1,..., j-1\), we have
For \(i=j\), we have
For \(i=j+1,..., N-1\), we have
Hence
Since \(B_j^0 \ge G_{0, j}\) and \(B_j^N \ge G_{N, j}\), the bounds in the following are established by the discrete comparison principle
As we know that \(G_{i,j}\) increases for \(i=0,1,\dots ,j\) and \(G_{i,j}\) decreases for \(i=j,j+1,\dots ,N\), we have
\(\square \)
Furthermore,
where \({\mathcal {L}}^N\) is the arc length of discrete solution \(\{u_i^N \}\). From (5), (12)-(14), we have
Theorem 4.2
The solution \({u_i^N }\) of (5) on the grid \(\{x_i \}\) of arc-length equidistribution satisfies:
where C is a constant independent of \(\varepsilon \) and N.
Proof
According to Theorem 2.1, Theorem 3.2, (9) and (15), the solution \({u_i^N }\) of (5) for (1) on the grid \(\{x_i \}\) of arc-length equidistribution satisfies:
\(\square \)
5 Numerical examples
The numerical examples for the problem (1) are solved by the old upwind scheme (2) and new (5) respectively on the uniform mesh and the adaptive mesh. The maximum node errors are denoted as \(e^N_{old}\) and \( e^N_{new}\), respectively. The numerical convergence orders are denoted as \(r^N_{old}\) and \(r^N_{new}\), respectively. The number of iterations are denoted as \(Iter_{old}\) and \(Iter_{new}\), respectively. The numerical convergence order is computed by
Example 1
Consider the singularly perturbed two-point boundary value problem:
where f(x) is chosen so that \(u(x)=e^{-\frac{x}{\varepsilon }}-e^x+(e-e^{-\frac{1}{\varepsilon }})x\).
The numerical results are shown in Table 1, Fig. 1 and Fig. 2.
Example 2
Consider the singularly perturbed two-point boundary value problem:
The exact solution is \(u(x)=\frac{\exp (m_1 x)-\exp (m_2x)}{\exp (m_1)-\exp (m_2)}\), where \( m_1=\frac{-1+\sqrt{1+4\varepsilon }}{2\varepsilon },\) \( m_2=\frac{-1-\sqrt{1+4\varepsilon }}{2\varepsilon }.\)

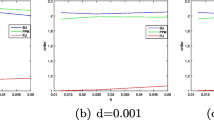
The solutions of Ex. 1 when \(N=32\) for \(\varepsilon =10^{-2}\)

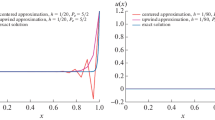
The errors of Ex. 1 when \(N=32\) for \(\varepsilon =10^{-2}\)
The numerical results are shown in Table 2 and Fig. 3.
Example 3
Consider the singularly perturbed two-point boundary value problem:
where f(x) is chosen such that \(u(x)=\frac{1-e^{-\frac{x}{\varepsilon }}}{1-e^{-\frac{1}{\varepsilon }}}-\cos (\frac{\pi }{2}(1-x))\).
The numerical results are shown in Table 3 and Fig. 4.

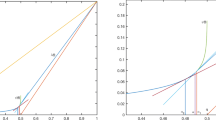
The errors of Ex. 2 when \(N=32\) for \(\varepsilon =10^{-2}\)
From the rows of iteration numbers, the errors and the numerical convergence orders for each \(\varepsilon \) in the tables, and from the ordinates of errors in the figures, we can see that the two adaptive methods both achieve better accuracy when the mesh is finer and are close to the first-order convergence uniformly with respect to \(\varepsilon \). Moreover, the proposed adaptive upwind finite difference method with new scheme (5) usually uses less iterations to satisfy the iteration tolerance and obtains better precision to resolve the boundary layers than the existing adaptive upwind finite difference method does.

The errors of Ex. 3 when \(N=32\) for \(\varepsilon =10^{-2}\)
6 Conclusion
In this work, the rigorous error analysis of the upwind finite difference scheme (5) on the grid that equidistributes the arc-length monitor function \(M(x, u^N(x))=\sqrt{1+((u^N(x))')^2}\) of the numerical solution \(u^N\) to solve the general non-conservative convection-reaction-diffusion problem (1) is finally accomplished through new efforts. By contrast, considering adaptive methods, M(x, u(x)) was of the exact solution u in [11,12,13,14,15,16], the equation was of conservative form in [17,18,19,20], of reaction-diffusion form with no first derivative term in [16, 27, 28, 31,32,33] and of convection-diffusion form with no zero derivative term in [11,12,13,14,15, 21], the a priori truncation error was from a priori knowledge of the exact solution in [22, 23], and the condition \(h_i/h_{i+1} \le 1\) or C was used in [21, 24,25,26]. In fact, the a posteriori error estimate of the upwind finite difference scheme, the existence of the solution of the adaptive upwind finite difference method, and its \(\varepsilon \)-independent first-order convergence are developed step by step with new progresses in this paper. The numerical examples confirm its uniform first-order convergence and show its advantage in precision, too. The works for solving nonlinear singularly perturbed problems, singularly perturbed mixed BVPs, problems having interior layers, systems of singularly perturbed BVPs, singularly perturbed two-dimensional elliptic problems, fractional order integro-parabolic equations and so on are expected to be extended for future study (see e.g. [27,28,29,30,31,32,33,34,35,36,37,38,39]).
References
Roos, H.-G., Stynes, M., Tobiska, L.: Robust Numerical Methods for Singularly Perturbed Differential Equations. Springer, Berlin (2008)
Miller, J.J.H., O’Riordan, E., Shishkin, G.I.: Fitted Numerical Methods for Singular Perturbation Problems. World Scientific, Singapore (1996)
Ascher, U.M., Mattheij, R.M.M., Russell, R.D.: Numerical Solution of Boundary Value Problems for Ordinary Differential Equations, Classics in Applied Mathematics, vol. 13. Society for Industrial and Applied Mathematics (SIAM), Philadelphia (1995)
Capper, S., Cash, J.R., Mazzia, F.: On the development of effective algorithms for the numerical solution of singularly perturbed two-point boundary value problems. Int. J. Comput. Sci. Math. 1, 42–57 (2007)
Kadalbajoo, M.K., Gupta, V.: A brief survey on numerical methods for solving singularly perturbed problems. Appl. Math. Comput. 217(8), 3641–3716 (2010)
Ranjan, R., Prasad, H.S.: A fitted finite difference scheme for solving singularly perturbed two point boundary value problems. Inf. Sci. Lett. 9(2), 65–73 (2020)
Roos, H.-G., Linß, T.: Sufficient conditions for uniform convergence on layer-adapted grids. Computing 63(1), 27–45 (1999)
Linß, T.: Layer-adapted meshes for convection-diffusion problems. Comput. Methods Appl. Mech. Eng. 192(9/10), 1061–1105 (2003)
Linß, T., Roos, H.-G., Vulanović, R.: Uniform pointwise convergence on Shishkin-type meshes for quasi-linear convection-diffusion problems. SIAM J. Numer. Anal. 38, 897–912 (2000)
Zheng, Q., Li, X., Gao, Y.: Uniformly convergent hybrid schemes for solutions and derivatives in quasilinear singularly perturbed bvps. Appl. Numer. Math. 91, 46–59 (2015)
Mackenzie, J.A.: Uniform convergence analysis of an upwind finite-difference approximation of a convection-diffusion boundary value problem on an adaptive grid. IMA J. Numer. Anal. 19, 233–249 (1999)
Qiu, Y., Sloan, D.M.: Analysis of difference approximations to a singularly perturbed two-point boundary value problem on an adaptively generated grid. J. Comput. Appl. Math. 101, 1–25 (1999)
Qiu, Y., Sloan, D.M., Tang, T.: Numerical solution of a singularly perturbed two point boundary value problem using equidistribution: analysis of convergence. J. Comput. Appl. Math. 116, 121–143 (2000)
Chen, Y.: Uniform pointwise convergence for a singularly perturbed problem using arc-length equidistribution. J. Comput. Appl. Math. 159(1), 25–34 (2003)
Beckett, G.M., Mackenzie, J.A.: Convergence analysis of finite difference approximations on equidistributed grids to a singularly perturbed boundary value problem. Appl. Numer. Math. 35, 87–109 (2000)
Beckett, M.G., Mackenzie, J.A.: On a uniformly accurate finite difference approximation of a singularly perturbed reaction-diffusion problem using grid equidistribution. J. Comput. Appl. Math. 131, 381–405 (2001)
Linß, T.: Uniform pointwise convergence of finite difference schemes using grid equidistribution. Computing 66(1), 27–39 (2001)
Kopteva, N., Stynes, M.: A robust adaptive method for a quasi-linear one-dimensional convection-diffusion problem. SIAM J. Numer. Anal. 39(4), 1446–1447 (2001)
Kopteva, N.: Maximum norm a posteriori error estimates for a one-dimensional convection-diffusion problem. SIAM J. Numer. Anal. 39(2), 423–441 (2001)
Chadha, N.M., Kopteva, N.: A robust grid equidistribution method for a one-dimensional singularly perturbed semilinear reaction-diffusion problem. IMA J. Numer. Anal. 31, 188–211 (2011)
Chen, Y.: Uniform convergence analysis of finite difference approximations for singularly perturbed problems on an adapted grid. Adv. Comput. Math. 24, 197–212 (2006)
Mohapatra, J., Natesan, S.: Parameter-uniform numerical method for global solution and global normalized flux of singularly perturbed boundary value problems using grid equidistribution. Comput. Math. Appl. 60, 1924–1939 (2010)
Mohapatra, J., Natesan, S.: Parameter-uniform numerical methods for singularly perturbed mixed boundary value problems using grid equidistribution. J. Appl. Math. Comput. 37, 247–265 (2011)
Sun, L., Wu, Y., Yang, A.: Uniform convergence analysis of finite difference approximations for advection-reaction-diffusion problem on adaptive grids. Int. J. Comput. Math. 88, 3292–3307 (2011)
Wang, A., Sun, L.: Uniform convergence analysis of finite difference approximations on adaptive mesh for general singular perturbed problems. IOP Conf. Ser. J. Phys. Conf. Ser. 1324, 012035 (2019)
Liu, L., Chen, Y.: Maximum norm a posteriori error estimates for a singularly perturbed differential difference equation with small delay. Appl. Math. Comput. 277, 801–810 (2014)
Gupta, A., Kaushik, A.: A robust spline difference method for robin-type reaction-diffusion problem using grid equidistribution. Appl. Math. Comput. 390, 125597 (2021)
Das, P., Natesan, S.: Optimal error estimate using mesh equidistribution technique for singularly perturbed system of reaction-diffusion boundary-value problems. Appl. Math. Comput. 249, 265–277 (2014)
Das, P.: An a posteriori based convergence analysis for a nonlinear singularly perturbed system of delay differential equations on an adaptive mesh. Numer. Algorithms 81, 465–487 (2019)
Das, P.: Comparison of a priori and a posteriori meshes for singularly perturbed nonlinear parameterized problems. J. Comput. Appl. Math. 290, 16–25 (2015)
Das, P., Rana, S., Vigo-Aguiar, J.: Higher order accurate approximations on equidistributed meshes for boundary layer originated mixed type reaction diffusion systems with multiple scale nature. Appl. Numer. Math. 148, 79–97 (2020)
Saini, S., Das, P., Kumar, S.: Computational cost reduction for coupled system of multiple scale reaction diffusion problems with mixed type boundary conditions having boundary layers. Rev. Real Acad. Cienc. Exactas Fis. Nat. Ser. A-Mat. 117, 66 (2023)
Saini, S., Das, P., Kumar, S.: Parameter uniform higher order numerical treatment for singularly perturbed Robin type parabolic reaction diffusion multiple scale problems with large delay in time. Appl. Numer. Math. 196, 1–21 (2024)
Das, P.: A higher order difference method for singularly perturbed parabolic partial differential equations. J. Differ. Equ. Appl. 24(3), 452–477 (2018)
Kumar, K., Podila, P.C., Das, P., Ramos, H.: A graded mesh refinement approach for boundary layer originated singularly perturbed time-delayed parabolic convection diffusion problems. Math. Meth. Appl. Sci. 44(16), 12332–12350 (2021)
Shiromani, R., Shanthi, V., Das, P.: A higher order hybrid-numerical approximation for a class of singularly perturbed two-dimensional convection-diffusion elliptic problem with non-smooth convection and source terms. Comput. Math. Appl. 142, 9–30 (2023)
Santra, S., Mohapatra, J., Das, P., Choudhuri, D.: Higher order approximations for fractional order integro-parabolic partial differential equations on an adaptive mesh with error analysis. Comput. Math. Appl. 150, 87–101 (2023)
Srivastava, H.M., Nain, A.K., Vats, R.K., Das, P.: A theoretical study of the fractional-order p-Laplacian nonlinear Hadamard type turbulent flow models having the Ulam-Hyers stability. Rev. Real Acad. Cienc. Exactas Fis. Nat. Ser. A-Mat. 117, 160 (2023)
Das, P., Rana, S.: Theoretical prospects of fractional order weakly singular Volterra Integro differential equations and their approximations with convergence analysis. Math. Meth. Appl. Sci. 44(11), 9419–9440 (2021)
Acknowledgements
The authors thank the anonymous reviewers for their valuable comments which help to improve the presentation. This paper is supported by National Natural Science Foundation (Grant No. 11471019) of China.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest statement
The authors declare that they have no conflict of interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zheng, Q., Liu, Z. Uniform convergence analysis of a new adaptive upwind finite difference method for singularly perturbed convection-reaction-diffusion boundary value problems. J. Appl. Math. Comput. 70, 601–618 (2024). https://doi.org/10.1007/s12190-023-01977-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12190-023-01977-2
Keywords
- Singularly perturbed problem
- Upwind finite difference scheme
- Arc-length monitor function
- A posteriori error estimate
- Adaptive/moving grid
- Uniform first-order convergence