
Abstract
The innovative concept of Internet of Underwater Things (IoUT) has a huge impact in different sectors including a small scientific laboratory, to a medium sized harbor, and to monitor vast undiscovered oceans. Internet of Underwater Things (IoUT) has become a powerful technology to support various applications such as collecting real-time aquatic information, naval military applications, maritime security, natural disaster prediction and control, archaeological expeditions, oil and gas exploration, shipwrecks discovery, water contamination, marine life observation and smart Ocean. IoUT is referred as smart intricately linked underwater objects to monitor these underwater operations. The IoUT framework incorporates several underwater communication technologies based on magnetic induction, optical signals, radio signals and acoustic waves. It is an emerging communication ecosystem which can reveal a new era of research, business and naval applications. It is a novel and vibrant paradigm for the Blue Economy sector bringing the ability to communicate autonomous underwater vehicles (AUVs), sensing, actuating and transferring this data to control centers using regular internet speeds through low cost technologies. It is anticipated to support future networking systems which can bring tremendous improvement in previous generations in terms of stable networking, high coverage, massive connectivity, low latency, high data rate and low power consumption. This study introduces the possible network framework of IoUT which is naturally heterogeneous and must be flexible enough to work under unpredicted ocean conditions. In this study, we examine channel models, routing protocols, networking topologies and simulation tools. Furthermore, we discussed recent advancements in IoUT in terms of smart devices, consumer electronics, communication and role of AUVs. In addition, edge computing, optical wireless communication (OWC), data analytics, blockchain, intelligent reflecting surfaces (IRS) and machine learning were viewed as promising techniques to support IoUT. We have dedicated a complete section to applications of IoUT. Finally, numerous open research challenges and future directions were presented. We believe this survey will be helpful to aggregate the research efforts and eliminate the technical uncertainties towards breakthrough novelties of IoUT.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
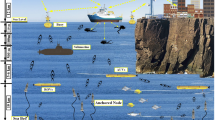
It is a fact that water which is customarily fractionated into different smaller seas and principal oceans is covering above two-third of the earth’s atmosphere. However, most of these ocean bodies are yet to be explored. Currently, scientists and researchers have more information about Earth’s moon, Venus and Mars rather than sea-beds. Thus, it is of paramount importance to discover more about the ocean. The concept of Internet of Underwater Things (IoUT) has become a powerful technology to enable smart oceans and explore vast ocean areas (Domingo, 2012). IoUT system is a technical revolutionary step of computing and communication. It has a remarkable role to evolve smart cities. It is referred as a smart network of inter-connected marine devices which digitally associate lakes, streams and oceans to support the exploration and monitoring of maritime environment. These objects sense, interpret, relay and respond to the surroundings with the advance features of internet, embedded sensors and power tracking technologies. Different objects can predict and analyze different information such as biological and chemical elements, temperature, pressure, humidity, turbidity and water quality. Furthermore, these objects are used for exploration of underwater areas to identify natural resources such as corals, metals, mineral and lost treasures. It is possible to connect these underwater objects with terrestrial objects such as smart phones and base stations. Underwater objects keep information which is ubiquitous, accessible in real-time through various types of communications such as Thing-to-Thing (T2T), Vehicle-to-Vehicle (V2V) and Human-to-Thing (H2T) etc. Although it can be noticed a rapidly increasing research interest in the advancement of IoUT applications, there are still several challenges to be tacked in the designing and deployment of IoUT applications. The major challenges are viewed in the aspect of reliability, mobility, energy storage and communication. The smart objects could be ships, buoys, autonomous surface vehicle (ASVs), autonomous underwater vehicles (AUVs) and underwater sensors. Objects like Autonomous Underwater Vehicles (AUVs) play a pivotal role in IoUT due to features like longer battery life span and mobility. Over the past two decades, huge multifaceted scientific contributions have been reported to feature IoUT and its role in smart oceans. In the literature, several research groups have made scientific contributions ((Yan et al., 2020a; Khan et al., 2019a; Morozs et al., 2020; Kao et al., 2017a) and the reference therein) to emphasize the potentials of IoUT. IoUT has a diverse range of applications in military, tactical surveillance, navigation, marine transportation, monitoring, emergency rescue, oil spill monitoring, submarine communication, diver-to-diver communication, marine observation and environmental protection. Although the IoUT system has several resemblances with terrene IoT system such as its function and structure, still it has technical differences arising from its constrained energy resources, computational limitations and communication environments. An illustration of the IoUT system is presented in Fig. 1 where sensor nodes are primary prerequisites for smart applications to the data center using acoustic or EM communication links. The data center also provides feedbacks to the sensor nodes by using same links in opposite direction.

An overview of IoUT system
For IoUT, UWSN has been known as a distinct network design. The network design of UWSN is shown in Fig. 2 where the key elements are underwater sensors located in deep or shallow water. Sensors are used to collect data based on their functionalities which is transferred to sinks through acoustic channels. Sinks are known as nodes with radio and acoustic modems. These sinks are ships, AUVs, ASVs or buoys. The sinks forward this data for effective management to the remote base station or monitoring center usually placed on the seashore by using radio channels. This monitoring center receives, analyzes and evaluates this information from the water areas. Additionally, AUVs distributed in deep water might be used as elective elements in UWSN system. AUVs are used to gather and transfer data. With the aforementioned elements, UWSNs are envisaged to support a wide range of IoUT services, including disaster prevention, water quality monitoring, off-shore gas and oil asset monitoring, marine animal tracking, seismic monitoring, and ecological monitoring (Morozs et al., 2020). The distinctive characteristics of UWSN, like low reliability, narrow bandwidth and long propagation delay will be the major challenges for IoUT. In previous studies, several researchers have focused to overcome the challenges of the dynamic topology, narrow bandwidth, end-to-end delay, real-time monitoring (Gopinath et al., 2019), uncertainty and complexity of IoUT nodes deployment, large Doppler’s spread leading to severe time variation and multipath spread, charging and replenishing of storages batteries, however, fewer studies have concentrated on critical problem of reliability. It is worth noting that low reliability leads to frequent data retransfer, which ultimately results in high power utility, high bandwidth consumption and longer delay. Therefore, reliability is critically important and channel models play a significant contribution in it. Table 1 illustrates IoUT features and challenges. To tackle these challenges in IoUT, according to the deployment of IoT nodes and utilization of AUVs, two different data acquisition methods have been suggested (de Souza et al., 2016; Gjanci et al., 2017). One scheme is based on the self-organization of IoUT nodes empowered by multi-hop transfer technique while other approach considers deployment of flexible AUVs to gather data from IoUT nodes. Furthermore, Yan et al. (Yan et al., 2018) reported an energy efficient data gathering method based on single AUV for IoUT system. By using the AUVs in IoUT systems, the life span of IoUT nodes can be substantially enhanced, while it provides relatively high age of information (AoI) as AUVs serve each IoUT node based on provided trajectory (Fang et al., 2021a). Thus, it is important to consider a tradeoff between the energy utility of both IoUT nodes and AUVs along with AoI of the IoUT system. Moreover, data security is another major concern in IoUT systems as the data travels across nodes, sinks and base stations to arrive at its required target. As the underwater nodes use acoustic channels, so there is a chance that a malicious node can trespass the network and steal sensitive data. It arises the challenge of data confidentiality and authenticity. It is clearly envisioned from the works (Gopinath et al., 2019; Abdillah et al., 2017; Sicari et al., 2015) that authenticity and confidentiality are the primary issues under the water IoUT system; while security and privacy are the major concerns above the water IoUT systems. There is a need for secure communication, access control and energy-aware techniques along with cryptographic standards because of the multi-tenant nature of the IoUT network. In (Gopinath et al., 2019), M. P. Gopinath et al. focused on security and privacy enhancement across IoUT. They proposed a secure cloud based approach to monitor IoUT system in real-time. They defined energy-aware efficient framework and an improved attribute based encryption scheme for secure data transmission.

Network architecture of UWSN
In this survey, we put an insightful view of the IoUT. The aim of this study is to analyze how to avail from the advancement of IoUT. The key contributions of our survey threefold: “Related work” Section introduces the related studies and research contributions in IoUT. Afterwards, we provide IoUT overview, architecture, models and several other characteristics from technical aspects in “Evolution and introduction of IoUT” section. Next, we point out the recent developments in IoUT in “Recent developments in IoUT” section. Later, in “Integration of IoUT with other technologies” section integration of IoUT with other technologies is described. Application and challenges have been investigated and evaluated in “Applications of IoUT” section and “Challenges in IoUT” section respectively. Finally, the paper in concluded in “Conclusion” section.
Related work
Wireless communication networks have brought an upsurge in research and technological aspects in both academia and industry. These communication technologies involve marine observation, wide ocean exploration for oil and gas, monitoring of water pollution and naval operations (Menaka et al., 2021). Several communication technologies such as EM waves, optical waves and acoustic signals are used for aforementioned application scenarios. These technologies have their advantages or disadvantages with regard to communication, transmission distance, reliability, latency, data rate and bandwidth. Such as EM waves are not efficient for long distance communication because of high water attenuation and lack of channel control. In (Saeed et al., 2019a; Gussen et al., 2016; Kaushal & Kaddoum, 2016), authors have explored existing underwater wireless communication (UWC) technologies. In (Gussen et al., 2016), C. Gussen et al. discussed the underwater communication based on optical, electromagnetic and acoustic waves and briefly highlighted associated technical challenges and applications. In (Li et al., 2019a), Y Li et al. discussed fundamental issues, recent advances and challenges of EM motions in underwater environment. In (Akyildiz et al., 2005), IF Akyildiz et al. investigated several key aspects and challenges of underwater acoustic communication. Underwater acoustic communication is the most mature and widespread technology since it allows to tradeoff relatively good transmission distances and low hardware costs. Short acoustics with low energy levels are less vulnerable to interference and error. However, exploitation of this technology is complex due to energy concerns and lack of harvesting techniques. In comparison to acoustic and radio frequency (RF) counterparts, UOWC offers much higher data rate and higher transmission distance. Nonetheless, UOWC also suffers from serious scattering and absorption by underwater media. UOWC requires considerable hardware cost while facing propagation challenges when line-of-sight (LOS) link is not available. However, localization techniques have been proposed for UOWC for its accuracy and efficiency (Saeed et al., 2018). In (Zeng et al., 2016), authors provided a comprehensive and exhaustive study on UOWC in the perspective of channel coding, characterization, modulation along with practical implementation of UOWC. Similarly in (Morel et al., 2007), authors investigated the absorption of optical signals of various wavelengths in the clearest natural waters. In (Mohsan & Amjad, 2021), we have provided comprehensive details on OWC and UOWC technologies. Table 2 provides different characteristics of underwater communication technologies.
Several research studies have been reported with the aim of offering tools for exploration and monitoring of underwater media, as well as testbed structures to fasten testing and development of IoUT (The Sunrise FIRE, 2013; Petrioli et al., 2014). Some projects have focused on software defined networks to enable programmability and agility to efficiently exploit spectrum (The SEANet Project: Toward a Programmable Internet of Underwater Things, 2015; Demirors et al., 2018). Under Horizon 2020, researchers are developing low-cost, lightweight acoustic devices and robotic platforms to design underwater wireless networks that support the IoUT (Technology Enabler for Internet of Underwater Things Applications, n.d.). South Korea’s Hoseo University and SK Telecom demonstrated first ever underwater data transmission using sound wave (Upal 2018). The aim of this project is to extend the concept of IoUT for marine environment for unprecedented monitoring. Military is also focusing to build military internet of underwater things (MIoUT) to connect with their submarines, ships, AUVs and sensors. Similarly, researchers from Senses Lab (2021) are focusing on IoUT development. They are working on communication protocols for the IoT, both applied in networks of aerial and underwater drones. The architecture and principle of IoUT along with major differences with IoT has been examined in (Domingo, 2012).This study proposes IoUT to preserve natural underwater resources. Authors have identified and addressed potential applications and critical challenges for IoUT. In another study (Celik et al., 2020), A. Celik et al. proposed a simulation based opto-acoustic network for IoUT system. This hybrid architectural paradigm shift provides solution for chronic underwater networking challenges along with smoothly integrating IoUT and IoT ecosystems. In (Akyildiz et al., 2016), authors proposed a SoftWater architecture to assist future generation underwater communication networks. By using network virtualization and network function virtualization (NFV) strategies, the proposed mechanism can easily integrate new underwater communication systems to achieve enhanced network capacity, energy efficiency and robustness. Similar to IoT, IoUT devices are prone to fragmentation attacks, rogue devices, man-in-the-middle, neighbor discovery, eavesdropping, flooding, jamming, spoofing, Sybil, reconnaissance, wormhole and denial of service attacks due to unattended, sparse and large scale networks (Menaka et al., 2021). In (Yisa et al., 2021), Yisa et al. outlined future research direction of privacy and security issues of IoUT and UWSN. In a study (Jouhari et al., 2019), Jouhari et al. reported UWSN enabling technologies, localization protocols and IoUT. DR KM et al. (Delphin et al., 2020) provided a comprehensive study to assist industry players and researchers to uncover the opportunities, critical challenges and feasible solutions of IoUT. Table 3 summarizes the research contributions of different studies conducted on IoUT.
Evolution and introduction of IoUT
Generally, the idea of network is defined as a set of devices which exchange useful information through technologies e.g., Bluetooth, WiFi and Ethernet. Similarly, internet is also considered as a network of networks. This distributed network has standardization, regulatory bodies and offers vast accessible ecosystem with multiple users and application scenarios. Within the internet, internet-of-things (IoT) is a sub-ecosystem which links machines to the World Wide Web. With the rapidly growing developments, IoT has become an advanced network of entities such as watches, home appliances, physical objects or any devices embedded with actuators, sensors or software. According to the latest report by Ericsson, 29 billion devices will be linked to internet by 2022 out of which 10 million will be IoT complaint. Moreover, IoT is rapidly growing at a staggering rate of 21% since 2016 (Nayyar et al., 2018). IoT has also empowered the concept of next generation underwater wireless sensor network named as IoUT. The term “IoUT” was first introduced by Domigo in an article titled “An Overview of the Internet of Underwater Things” in 2012 (Domingo, 2012). Similar to the concept of IoT, IoUT is defined as a world-wide interconnected network of digitally identified underwater objects capable of sensing, processing and transferring information to remote base stations. IoUT systems measure essential physical and chemical parameters at oceans, providing both historical and real-time information. This collated ocean sensory data will help scientists to predict future phenomena and assist policy makers to ratify strategic planning (Hughes et al., 2017). With IoUT, underwater monitoring and exploration becomes more promising and efficient. The following reasons emphasize the importance of IoUT in real world:
-
With 71% of the earth’s surface covered by water, scientist, researchers and marine biologists believe that still more than 60% of ocean’s area is undiscovered. For wide area monitoring and diverse exploration, IoUT is essential.
-
IoUT has a strong impact on deployment of smart and autonomous sensors for wide area coverage, marine observation and marine life precision monitoring.
-
IoUT can also be used for naval missions and to defend enemy attacks. Additionally, IoUT can be useful in unlocking ocean secrets, natural disaster prediction and monitoring and aquatic life new species discovery.
IoUT architecture
IoUT architectural model is based on communication components and sensing objects. These objects are usually termed as nodes and sinks.
-
Underwater endpoint nodes are the devices at the underwater level of the network, including tag-readers, radio frequency tags, acoustic tags, actuators, data storage micro-chips, hydrophones, cameras and sensors.
-
Underwater mid-layer nodes are placed above the endpoint nodes and are based on relays, repeaters, gateways, modems and data redistribution points.
-
Sink nodes are the overwater nodes with terrestrial facilities like onshore stations, satellites, ships, exploration platforms and buoys.
In general, IoUT system is complex composed of multiple heterogeneous networks; thus, it is critically essential to consider a flexible layered system. Each layer has its unique functionality and scalability. Mostly IoUT architectures are comprise of three layers as illustrated in Fig. 3.
-
Perception layer: It is the bottom layer of the IoUT architecture. It is composed of all underwater sensing nodes, energy harvesting devices, global positioning system (GPS) sensors, surface links, UAVs and monitoring stations. The sensors and actuator are used for data collection and command actuation. The primary aim of this layer is to gather diverse data regarding water properties, water quality and regular condition monitoring, aquatic life and underwater objects.
-
Network layer: The primary objective of network layer is to obtain and process data received from perception layer. It is composed of all wireless as well as wired links, internet, cloud platform and remotely connected servers. Network layer is mainly responsible for bi-directional data packet handling between each endpoint as well as translation between adjacent layers. These tasks are addressed through data routing and internet protocol.
-
Application layer: It comprises all graphical user interface (GUI)-based front end services for the analysis of sensed information is the format of data. Application layer in IoUT is mainly responsible to identify each object such as sensor type, id, location etc. and then collect data, process and deliver necessary commands. Collecting data includes sensing, tracking, storing and streaming data.

Standard IoUT architecture
A basic IoUT system architecture was proposed in (Domingo, 2012), which contains perception layer, network layer and application layer. In (Qiu et al., 2019), T Qiu et al. proposed five-layer IoUT system architecture comprising of sensing, communication, fusion, networking and application layer. Authors also discussed the application of artificial intelligence (AI), cloud and fog computing in their proposed architecture. A cloud-based IoUT system is provided in (Gopinath et al., 2019), which highly emphasizes on above the water security. Moreover, integration of machine learning algorithms in AI can tackle several challenges in IoUT such as quality of service (QoS), network security, data transmission, event detection and object targeting. To meet the stringent requirements of IoUT, authors in (Hou et al., 2021) proposed underwater network architecture along with machine-learning-assisted algorithms with regard to data sensing, transmission, and processing. Table 4 summarizes different architectures of IoUT in literature. IoUT system encounters some challenges which should be tacked to design solid architecture including several communication techniques, network density and tracking techniques. Generally the achievable architecture of IoUT based on the classification standard is as follows (Khalil et al., 2020):
-
Channel: The several wireless channels which are being used for maritime communication can be categorized as magnetic induction, optical, acoustic, RF and hybrid.
-
Mobility: On the basis of mobility of smart objects, IoUT can be divided into stationary and mobile network.
-
Spatial coverage: On the basis of spatial coverage, IoUT can be classified as one dimensional, two dimensional and three dimensional networks.
In order to compare different studies on the basis of system architecture and key features in marine environments such as reliability, delay, energy and mobility, we have summarized Table 5. Some of these studies have focused to realize IoUT concept while other studies aim to exploit software-define networking paradigms in UWSN to minimize system complexity.
IoUT Channel models
The wired and wireless network channel models differ with the type of communication technology. As underwater physical layer has dissimilar behavior under different channel models and propagation mode. Particularly, it is difficult to design an appropriate channel model for ubiquitous deployment. An accurate model goes through processes to meet the intended requirements. In (Jahanbakht et al., 2021), authors propose a suitable channel model with better performance in marine data transfer. This channel model can be utilized to predict the performance of communication network, design the optimal position of nodes and reduce the energy utility before its deployment (Jahanbakht et al., 2021). Considering above features, channel models are usually tailored to their application scenarios. Currently, several studies have demonstrated channel models for IoUT. Among them few are.
-
It is quite usual in marine channel modeling to use a constant phase velocity across the whole propagation medium. However, authors in (Naderi et al., 2017a) proposed nonisovelocity geometry empowered acoustic channel model in shallow waters. Authors distributed the ocean water into several layers of piece-wise linear sound speed profiles. Then they utilized conventional acoustic signal propagation method to extract the the time-varying channel transfer function. This complication level of this proposed model can be controlled by maximizing the number of linear layers. This solution can also result in inaccuracy or instability subject to additional thick or thin layers.
-
Relatively longer wavelengths of acoustic signals make them less vulnerable to forward scatter and backscatter phenomena. In (Zhou et al., 2019), Zhou et al. studied the impact of scattering particles on acoustic wave propagation in underwater scenario. Authors randomly distributed these scattering particles by considering an assumption of rectangular cross section of ocean. This study has two major drawbacks. Firstly they did not take account of stochastic size of scattering elements and secondly they neglected the realistic 3D section of seawater.
-
It is simply easy and safe to suppose the sea surface as flat plane in underwater acoustic signal transmission, however, it is not true in case of seafloor. In (Naderi et al., 2017b), Naderi considered the up and down sloped ocean conditions of seabed rather than flat plane. It is an interesting study which is very crucial subject to shallow water where plants and coral reefs are present.
IoUT routing protocols
Routing protocol determines the channel state information or links to be followed by data packets. It plays a key role to achieve intended QoS for IoUT. Hence, it is very essential to consider various types of routing protocols which have great impact in IoUT. We have defined IoUT routing protocol into five types: (1) opportunistic, (2) geographic, (3) on-demand, (4) multicast-tree, and (5) table-driven-based as shown in Fig. 4.

The potential routing protocols for IoUT (Liou et al., 2018)
Opportunistic
This routing protocol exploits the broadcast feature of wireless communication. When a sending node transmits data packets, all the adjacent nodes obtain the packets; then receiving node decides where to transmit data packets based on a predetermined condition or a probability model. For instance, the condition might be distance between the sink and the receiver. When the condition is fulfilled, the receiving node will decide to re-broadcast the packets. Through this strategy, the receiver will decide either forwarding packets by itself or it can directly transmit the packets.
On-demand
This protocol follows a link or path on demand. Specially, a sensor node initiates the route discovery process when it is required to send data to the intended node. In the start of this process, the link detection process will flood the network. Then, as the intended receiver node obtains the requested packet, it will deliver back the link acknowledgement reply confirmation. Similarly, a sensor node can discover a link to its intended receiver node and send out data packets using this link.
Geographic
This routing protocol can be considered a more suitable approach for IoUT as compared to on-demand routing protocol. It can remove the broadcasting overhead by providing the geographic position of the sensor nodes, along with the destination, source and neighboring node. In this approach, a node can adjust its next hop according to the location of neighboring and destination nodes and sensibly forwards data packets to the desired receiver.
Table-driven
The aim of this routing protocol is to reduce the latency imposed by route detection before transmitting data packets from source to the destination node. In order to reduce the real-time latency, this protocol aims to keep records of destination nodes and their routes by maintaining routing data throughout the communication network. Through this strategy, it can easily maintain contemporary routing information from each sending node to the destination node. When data packets are ready to be transmitted, the sending node can check the routing information to deliver data through the right routes.
Multicast-tree-based
It is a state-of-the-art substitute strategy for routing in underwater media. It is different from aforementioned routing protocols as it designs a tree topology for optimal route. To obtain a precise target of energy reduction or delay minimization, this protocol builds the corresponding tree such as minimum spanning tree or shortest path tree. It is worth mentioning, rather than flooding packets in the entire network, this protocol follows a certain tree topology to attain the desired outcomes. We have summarized the benefits and drawbacks of these routing protocols in Table 6.
IoUT network topologies
By using TCP/IP model as a reference for IoUT, nearly all previously reported network topologies might be utilized in gateway-empowered marine applications (Xu et al., 2019; Jahanbakht et al., 2021; Jiang, 2017). Two of these topologies (mesh and tree) are highly potential and suitable for IoUT implementation as shown in Fig. 5.

Reported tree (left) and mesh (right) network topologies in IoUT (Jahanbakht et al., 2021)
We know that frequency bandwidth is limited and energy harvesting is difficult in undersea environment. Therefore, advanced distributed topologies are hardly used in underwater applications, instead, the traditional mesh and tree topologies are dominant. The tree topology is usually used in small networks depending on one-way protocols (Jiang, 2017; Rani et al., 2017). The tier negotiation relies on a request and response strategy. In contrast, mesh topology is used in sophisticated networks by efficiently using available frequency bands and signal routes to meet the high traffic demands. It ensures efficient exploitation of limited channel capacity of underwater media (Kao et al., 2017a; Li et al., 2018). It can be noticed from Fig. 5 that each signal route has its own reliability quantified in the form of its bit error rate in IoUT network. It helps us for appropriate selection of a suitable network topology for any required application with specific bet error rate target. However, adopting a suitable network topology, building a multi-tier network and choosing an accurate protocol for each layer of network architecture is a difficult task. It requires tedious efforts for designing, testing, debugging, integrating and deploying the latest versions of the network. Some simulation tools are available to make this process easier for underwater network designing and layer-wise protocol testing.
Underwater network simulation tools
In IoUT applications, improper configuration of any network can cost high money and time. The best solution is to simulate network and test in every aspect before its deployment. To do this, an extensive range of commercially available and open source simulation tools are available. Some of these tools are Network Simulator (ns), Aquatic Simulator (AQUASIM), World Ocean Simulation Sys. (WOSS), QualNet, NetSim, Java Simulator (J-Sim) and Objective Modulator Net. Testbed in C++ (OMNeT++). Table 7 summarizes some of these tools which are capable to model protocols and underwater channels.
The network support level in the simulation tools is different for ad hoc, wired, wireless, or more advanced networks. Network Simulator (ns) and its upgrades ns-1, ns-2, ns2-Miracle and ns-3 are extensively utilized by above 600 industrial and academic institutes in more than 50 countries (Petrioli et al., 2015). Some other tools like DESERT Underwater, WOCC and AQUASIM also rely on ns. These tools are equipped with acoustic transmission, underwater channel modelling and related protocols. According to their license level e.g., military, education, research or commercial, these simulation software can analyze (Dorathy & Chandrasekaran, 2018):
-
Simulation of network entities;
-
Simulation of commercial devices;
-
Spatial arrangement of network topology;
-
Traffic, routing, data transmission;
-
Network protocol design and testing;
-
Channel modeling;
-
Analysis of network performance.
Moreover, all other simulation tools of Table 7 except OMNet++ and AQUASIM can perform IoUT network emulation. Network emulation offers a highly pragmatic approach to characterize the network. Thus, it is suggested to perform network emulation, straight after network simulation and prior to final deployment. This central level will ensure QoS of IoUT network through testing and analyzing in a real-life scenario. It is also worth describing that simulation and modelling results must be supported with experimental results to find the minimum acceptable accuracy for outcomes. Furthermore, it is highly recommended to carry out cybersecurity tests as underwater networks are vulnerable to cyberattacks.
Recent developments in IoUT
This section will cover technical advancements in IoUT which usually contain smart devices, consumer electronics, IoUT communication technologies and role of AUV in IoUT.
Smart devices for IoUT
The IoUT is based on smart devices which consider wireless means such as magnetic induction, optical and acoustics for their communication in marine environment. The IoUT devices can be featured according to their transmission range, energy consumption and applications (Khalil et al., 2020; Singh & Kapoor, 2017; Mohanty et al., 2016). For instance, the Aquacomm modems (9600/4800 baud programmable, 100–480 bps, 16 kHz/30 kHz) are low-powered (RS-232 or 3.3 V) devices which are being used for marine networking and pipeline monitoring. Similarly, AquaSense series sensors (WL-21031), underwater GPS kit WL-11001 and M64 WL-11003 are also used for communication in underwater medium. The low-powered M64 modem (64 kbps/200 kHz) operates in UART 115200baud with serial (R232 or 3.3 V) for range up to 200 m. The AquaSense series sensor (WL-21031-1) contains Load-Shackle, Tilt-sensor, Salinity-sensor and Oxygen-sensor are used for communication and sensing. The photoelectric sensors such as Thru-beam (MLS4B and MLS5B) and retro-reflectors (FE-MLS8C) are considered for underwater optical communication. In (Nayyar et al., 2018), researchers presented a new IoUT prototype e.g., Smart IoUT 1.0 to sense and collect underwater data. Smart IoUT 1.0 is integrated with 2 sensing nodes and 4 sensors (Water Turbidity Sensor, pH analog, DS18B20 Temperature Sensor and EZO Dissolved Oxygen Sensor) for obtaining real-time data and to ingress anywhere through Internet via Thingspeak.com. Furthermore, authors in (Berlian et al., 2016) introduced a smart architecture occupying big data and IoUT which includes an open platform to process data from ROV and portable sensor containing water characteristic to get information about temperature, dissolved oxygen, salinity, total dissolved solid, conductivity, pH, oxidation-reduction potential in monitored rivers temporary. It also includes underwater camera for coral reef monitoring to prevent coral bleaching. Some of these smart devices used in IoUT are shown in Fig. 6.

Different smart devices and sensors for IoUT (Khalil et al., 2020)
Consumer electronics for IoUT
Current advancements in consumer electronics industry have brought a remarkable progress in IoUT such as underwater monitoring and exploration. IoUT developments can enormously benefit terrestrial smart cities and futuristic floating cities. Floating city of Oceanix based on blue technologies will be a resilient and sustainable city over 75 ha to accommodate 10,000 residents (Oceanix City, n.d.). Moreover, marine archeologists at Archeosub have developed a novel submarine with IoT which will pave a way for new generation of AUVs and robotic submarines (Submarines with IoT, n.d.). Similarly, scientists from King Abdullah University of Science and Technology (KAUST), Saudi Arabia investigated simultaneous lightwave information and power transfer (SLIPT) to transfer data and energy in underwater devices (Rembert 2020). They successfully charged battery of an underwater camera via its solar panel by using an optical source. Furthermore, Sigfox U.S.A has stated that Gloucester Innovations used IoUT to store seafloor data through dubbed “LobsterNet” (Rembert 2020) by using devices to transmit oceanic acidity, temperature, depth and other useful data on a daily basis. Researchers from the NATO Science and Technology Organization (NATO STO) Maritime Research and Experimentation Center (CMRE) have deployed IoUT to understand the oceans. They integrated low-cost SPOT Trace devices into freely floating buoys to understand surface drift behavior. These devices transmit their geographic location information over the Low-Earth Orbit (LEO) satellite network (Rembert 2020).
Every year, the Consumer Electronics Show (CES) is organized for those who are interested for investment in consumer electronics. Previous session of CES instigated several smart marine devices including remotely controlled drones, Subblue scooters and autonomous cameras (Subblue, 2019) as shown in Fig. 7. These devices are used for several underwater applications; for example, the Navatics Mito is a 4 K camera enabling 1080p streaming feature to store and stream efficiently in marine applications (NavaticsGlobal, n.d.). Similarly, Robosea’s Biki is an example of flying underwater drone which supports marine photography, discovery and surveillance. Another promising example of smart devices is Robo-shark, which has a range of 1.5-3 km and can dive up to 300 m. Additionally, the Subblue scooter is being used by divers to explore underwater environment. It has a built-in battery powered motor. In future, the consumer electronics industry will actively participate in marine applications as these smart devices are evolving day by day.

Smart underwater devices in Consumer Electronics Show (Khalil et al., 2020)
Communication in IoUT
The communication between smart underwater devices in IoUT is hard due to turbid and harsh nature of oceans. Currently, there are four main communication technologies in IoUT, e.g., magnetic induction, optical waves, RF waves and acoustic waves. Here, we briefly discuss these technologies. Acoustic signals are the mostly utilized technology because of long transmission distance in underwater environment. Several studies on acoustic networks have reported data rates above 20 kbps for a distance nearly 1 km in deep marine environment. Nonetheless, data rate is decreased to 250-440 bps for longer distance up to 100 km which can be attained at the cost of higher latencies (Saeed et al., 2019a). Acoustic-based underwater communication system encounters synchronization challenge due to higher latencies. Alternatively, RF-based underwater communication system offers a plane transition at air to water interface. This feature can support cross-boundary transmission by combining underwater and terrestrial RF communication networks. Moreover, RF waves can tolerate turbidity and turbulence in water. However, the major challenge in RF-based systems is short transmission distance at low frequencies from 30 to 300 Hz. Another major issue is large size antenna which ultimately maximizes energy consumption and design cost. In contrast, optical communication enables low latency and high data rate in IoUT (Mohsan & Amjad, 2021). These capabilities of optical communication offer real-time underwater telephony, navigation, diver-to-diver communication and other multimedia applications. In addition, optical IoUT is smaller in size and cost-efficient as transceivers are laser diodes and photodiodes. Laser diode based IoUT is an emerging optical IoUT (O-IoUT) which offers higher energy efficiency and better communication performance. However, the major challenges of optical-based IoUT are limited range and line-of-sight (LOS) restriction between transceivers. Recently, magnetic induction (MI) is also used for average-speed omnidirectional limited-range underwater communications (Akyildiz et al., 2015). The response of MI channel is highly stable and predictable rather than aforementioned technologies. The MI waves can penetrate into lossy media such as ocean scenario at a speed closely equal to speed of light. It validates the fact that MI signals can propagate at high speed and tackle latency challenges encountered by acoustic signals. MI communication can be achieved by small size transceiver coils with non-audible and non-visible signals which can be effectively used in several military and civilian applications.
Role of AUV in IoUT
AUVs are envisaged as key enablers to empower IoUT to highlight the problem of ever-growing demand of ocean observation. AUVs play a key role due to capabilities of energy storage and mobility. For instance, the battery life time of an average AUV is greater than an underwater sensor node. AUVs are used to connect sensors with the internet or other devices; the route trajectory within the AUV is the key aspect to produce the effective routing for IoUTs. Therefore, AUVs are used to support IoUT and solve underlining challenges through various schemes and methods. Apart from appealing benefits, energy constraint of AUV’s mobility makes it difficult to attain extravagant data exchange considering hostile acoustic channel and complex underwater conditions. In this section, we have discussed the role of AUV in IoUT from recent studies.
Data collection
Because of harsh and unpredictable nature of ocean featured with the energy constraints of acoustic transmission, it is very hard to design energy efficient routing protocols In (Lin et al., 2017), Lin et al. stated that conventional data gathering techniques lead to high imbalance in energy consumption and high power consumption among network nodes. With the support of AUVs, G. Han et al. (Han et al., 2017) investigated that data latency and average data gathering time is significantly reduced.
Time synchronization and localization
Localization of node is an essential parameter in the deployment of UWSN as mostly UWSNs are location dependent. Unavailability of GPS, presence of water stratification, the use of asynchronous clocks and mobility characteristic of underwater media makes accurate node localization difficult and challenging (Yan et al., 2020b). Due to the absence of GPS and long propagation delay, the node clock in IoUT is asynchronous such as it is affected by offset and time skew. Some research contributions on localization for IoUT are depicted in Table 8. Localization is an essential task for O-IoUT to support various applications including navigation, routing, data tagging and maintaining link connectivity. To support localization, AUVs can possibly dive into ocean after obtaining its location information from the GPS and transmit data packets to unspecified nodes to check their positions. In (Hao et al., 2020), authors presented an enhanced AUV-assisted time different of arrival (TDoA) localization algorithm for UASN. The proposed technique overcomes traditional localization drawbacks and achieves relative higher accuracy.
Void prediction, avoidance and repair
The existence of voids in any marine network can severely degrade its performance and reliability. These routing voids cause challenges in packet delivery and link connectivity. This problem can be mitigated through AUVs. AUVs can enable the prediction to repair routing voids in any network as stated in a recent study (Jin et al., 2020). Authors proposed a Routing Void Prediction and Repairing (RVPR) algorithm in AUV-aided UASNs. In proposed scheme, AUVs are used to shift sensor nodes to overhaul the routing voids after finding the voids. Authors also designed a task selection strategy which allows AUVs to select the most critical and urgent repair task.
Topology optimization
High movement of underwater nodes adversely affects the network topology. Therefore, topology optimization of UWSN is crucially important. Topology optimization can reduce the network latency. In (He et al., 2017), M. He et al. proposed a mechanism to optimize network topology by using AUVs. The developed system enhances the adaptability and robustness of the network topology. The results presented in that study show higher reliability, lower latency and lower energy consumption. Table 9 summarizes the research contributions on AUV-assisted IoUT.
Integration of IoUT with other technologies
Edge computing in IoUT
The idea of edge computing was initially proposed in IoT to replace cloud computing. As the name shows, in edge computing, the edge devices are used for required computing tasks, so communication and data transmission becomes less challenging. Edge computing based sparse data transmission is absolute for IoUT which encounters hostile and harsh communication medium. Edge computing is referred as elastic or distributed computing paradigm within IoUT, therefore, computing is maintained in the edge-devices like data acquisition tools, mid-layer nodes or underwater endpoints. In the unavailability of edge computing, the process must be carried out on centralized clouds, servers or local computers (Liu et al., 2018), which need shuttling data back and forth, thus proffering it insufficient for IoUT (Wang et al., 2019). In edge computing, devices need to enlarge their potentials like computation, communication, data collection and data processing. Data processing will move the services towards numerous distributed nodes from a single centralized point. The key benefits of using a decentralized edge computing mechanism in IoUT are swift inner-network decision making, latency reduction and high data rate (Cai et al., 2019). In a recent study, M. Liang et al. (Liang et al., 2020) demonstrated a smart ocean convergence IoT framework empowered by edge computing. This platform proposes a joint strategy of edge computing and software-defined networking to enable interoperability of ubiquitous network technologies along with edge computing which offers low latency, scalability and ultra-reliability in underwater networks. This strategy will fulfill the rapidly growing vessel’s requirement for communication and computing capabilities. In another work which focuses on IoUT and edge computing, an edge-based four layers software-defined smart IoUT (Edge-IoUT) is presented for efficient transmission of data (Bhattacharjya & De, 2021). The proposed EdgeIoUT architecture comprises of edge computing where a drone is used as an edge device. EdgeIoUT operates in four layers, (i) SDN switch, (ii) SDN data memory layer, (iii) drone layer, and (iv) underwater sensing and clustering layer. The proposed strategy shows better performance with regard to packet delivery and energy consumption as compared to traditional SD-IoUT network.
Data analysis in IoUT
The rapid advancement and deployment of IoUT technologies in underwater environmental exploration and monitoring creates huge data or big marine data (BMD), while the recent technologies of Big Data analytics assist in analyzing these marine environment data. Big Marine Data (BMD) refers to extensive amount of heterogeneous information gathered from ocean fields. The key features of BMD are multi-disciplinary type (e.g., economical, environmental, biological, chemical, physical, etc.), varying nature of data source (e.g., tags, cameras, sensors) and spatially vast coverage. The elements and processing stages of BMD are as given below (Ahmed et al., 2017; Huang et al., 2015):
-
1)
Acquisition: It includes the collection of raw data.
-
2)
Transportation and security: It involves encryption and transmission of data across different communication media to its desired storage, while maintaining its security and reliability.
-
3)
Storage and privacy: It involves archival requirements (file format, retention and duplication) and policies on data storage (user privacy and legal concerns).
-
4)
Special purpose processing: For big datasets, bespoke software subscriptions are needed to search, pre-process by cleaning and filtering, recognition and label, post-process and visualization and update.
-
5)
Exploitation and leveraging: It makes sure that users are getting benefits with regard to enhanced revenue. Some advantages of underwater data exploitation are protection of marine environment and species, tracking maritime transportation, safe travel, new ocean technologies, support experts to provide informative bespoke data, water’s vital cleanliness and business growth.
As in several IoUT systems, data collection frameworks used for underwater environment data also suffer from major challenges, specifically from bad data, unwanted data and large amount of data. Research fraternity around the globe is working to find solution to tackle these challenges. In (Yang et al., 2018), J Yang et al. proposed edge computing empowered IoT based marine depth mapping algorithm to immediately describe the contour of data gathered over the IoT. The proposed algorithm can accurately calculate the distribution of contour lines in a short time. In another work, Blix and Eltoft (Blix & Eltoft, 2018) proposed machine learning automatic model selection scheme to estimate chlorophyll-a in optically complex water. The proposed automatic model selection algorithm (AMSA) can decide the suitable model for a provided dataset. This algorithm uses three machine learning regression models and four machine learning feature ranking methods. It can make automatic selection between regression models to find the required parameter along with finding the number and combination of features to decide the best model. In (Addison et al., 2018), Addison et al. investigated challenges in ocean data management and interpretation due to implication of Big Data. Authors recommended an approach to manage Big Data, which needs collaboration between data scientists and marine practitioners. Similarly, Li et al. (Li et al., 2019b) demonstrated a support vector regression model with smoothness priority for underwater sensor data estimation to tackle the abnormal, multi-noise, abruptly fluctuating and non-stationary data. The smoother ensures stable starting values for the next nonlinear estimation on the basis of support vector machines. Since the existing correlation techniques for ocean big data faces poor stability and time delay, Song et al. (Song et al., 2018) proposed a new strategy to send the gathered data to the cloud storage platform. Considering local and global Moran index calculations, they were able to store ocean big data or relatively high correlation to cloud platform which ultimately reduced the data analysis time. Recently, ML solutions have been proposed to investigate the specific BMD behavior and features. In (Jahanbakht et al., 2021), authors briefly discussed the suitable ML solutions to handle and analyze BMD. This study puts an insight into the state-of-the-art applications, techniques, tools and proposes promising future research aspects and innovations in the broad area of BMD and IoUT. The aforementioned studies are a proof that research and development efforts on BMD have been growing rapidly.
OWC in IoUT
Apparently, the fundamental and crucial issue is efficient communication between different objects of IoUT network. Evolving IoUT networks require a high quality standard of service with low latency, ultra-reliability and high-speed. Existing IoUT networks use optical waves, acoustics and RF waves for communication. These communication technologies have advantages and disadvantages. RF waves are used on the water surface due to high absorption. On the contrary, acoustic wave can travel longer, but encounter low data rate and high latency due to low speed of sound waves. Recently, optical signals have emerged as promising alternative to counterpart acoustics and RF due to high speed underwater communication (Gkoura et al., 2017). A very high optical band is regarded as an appropriate alternative to design reliable and high density 5G IoUT networks. In contrast to RF technology, OWC technology offers other special advantages such as lower power, secure transmission, reduced latency and high speed. Optical wireless communication plays a vital role to sense, monitor and distribute data in IoUT’s massive system connectivity. We know that the transmission range of optical signals is lower than acoustics. Moreover, OWC deployment is challenging which can affect its channel characteristics like heavy winds, fluctuations in temperature, suspended particles, strain in deep sea and salt accumulation in soil. This transmission range of UOWC is restricted due to the intrinsic optical characteristics and other propagation losses in water such as salinity, turbulence, scattering and absorption. Due to these shortcomings of UOWC, a densely deployed network of the smart entities is needed in optical-IoUT (O-IoUT) to transverse the required data in a multihop way. In addition, several application of O-IoUT, such as routing, data tagging, surveillance, navigation, and communication require geographic position information of the integrated smart objects. Few studies on O-IoUT have focused on localization topic. For instance, N. Saeed et al. discussed accurate three dimensional localization of smart objects in O-IoUT. Similarly, Akhoundi et al. (Saeed et al., 2019b) proposed time of arrival (ToA) and received signal strength (RSS)-based positioning method for O-IoUT. Furthermore, few more studies introduced multihop localization technologies for smart objects operating on optical waves (Saeed et al., 2019c; Celik et al., 2018). Several other works have reported O-IoUT for underwater solid state lightning (Shen et al., 2021), delivering internet, self-powering IoUT devices (de Oliveira Filho et al., 2020) and cure for chronic underwater networking issues (Shihada et al., 2020).
Blockchain in IoUT
In IoUT, smart objects should be securely interconnected and authenticated during autonomous interactions in order to security attacks by malicious nodes. The lack of resource constraints, inability and security against attacks, immature standards, software and hardware impairments in IoUT are main factors for using blockchain in IoT and IoUT. Blockchain is a distributed and decentralized technology which can potentially tackle security issues in IoT and IoUT networks. In (Yazdinejad et al., 2019), authors used blockchain in control and configuration of IoT. Mostly security techniques and authentication mechanisms are centralized and usually need a trustworthy third party, which can maximize the energy consumption and cost due to additional overhead, specifically for underwater communications. In contrast, there are certain limitations on objects in the marine environment; the most crucial are energy constraints. Blockchain can store IoUT data inexpensively and securely without depending on any intermediary authority. Entities of blockchain can process and validate IoUT data before inclusion of IoUT data to blockchain. This process is known as consensus mechanism which removes third party participation for processing of IoUT data. This mechanism avoids fraudulent activities and ensures data transparency, immutability and functional resilience of the blockchain ledger. It can leverage public key infrastructure for authentication, authorization of entities and encryption in peer-to-peer networks. It facilitates decentralized storage of heterogeneous underwater IoT devices, secure data processing and sharing with different entities. In (Hammi et al., 2018), researchers proposed an energy efficient, transparent and robust decentralized authentication method for IoUT through blockchain technology. Authors validate through results that proposed mechanism is efficient for marine objects with limited computational power, energy and memory. The decentralized authentication of proposed mechanism significantly reduced energy consumption as compared to classical mechanisms in a cluster network. Additionally, this method increases delivery rate and reduced end-to-end delay. In another study, MA Uddin et al. (Uddin et al., 2019) proposed a lightweight blockchain enabled framework based on multilevel sensor monitoring architecture for monitoring and management of IoUT on cloud data. The proposed mechanism consists of a layer-based architecture with cloud and fog elements to securely store and process IoUT data using customized blockchain technology. The fog layer smart gateway addresses the scalability challenges, data routing to miners issues and transaction preparation challenges. Sensor nodes are clustered and categorized according to selected residual energy cluster heads. Node tracking and cluster head are performed through Bloom filter. A hierarchical topology is used for secure routing of IoUT data which ensures the privacy and legitimacy of data sources. A secure performance analysis is carried out to validate that proposed framework can gather data from IoUT devices in the monitoring region securely and efficiently. Above studies validate that blockchain can improve QoS of IoUT applications. However, existing blockchain technology is not sufficient and computationally smart enough to handle IoUT big marine data. Several nodes include a replica of the complete ledger in blockchain. This perspective requires high storage. Consequently, the consensus mechanism cannot process transaction faster than classical centralized IoUT (Fernández-Caramés & Fraga-Lamas, 2018). Table 10 presents benefits and drawbacks of conventional and blockchain enabled IoUT architecture.
Machine learning in IoUT
With the growing interest in IoUT, various compelling IoUT applications have been introduced which develop a new era of maritime activities. However, some mission-critical maritime activities containing disaster prevention, underwater navigation, tsunami prediction and ocean earthquake forecasting pose a critical challenge to IoUT architecture. The dynamic and harsh nature of underwater environment has limited the developments of IoUT. In this context, machine learning has been used to boost the performance of underwater applications and create self-adaptive IoUTs. X Hou et al. (Hou et al., 2021) conceived the idea of mission-critical IoUT to support these implacable maritime activities. Authors briefly discussed features and associated challenges. Authors proposed future maritime network architecture to meet stringent demands of mission-critical IoUT along with machine-learning-assisted key technologies to revolutionize network methodologies enabling information sensing, transmission and processing. Furthermore, authors investigated open challenges and potential research trends. It is the first study to conceive a future maritime network design using multiple heterogeneous platforms containing UAVs, AUVs, satellites and floating platforms. Authors provided an insight on machine learning algorithms and key technologies for IoUT with regard to fault-tolerant information sensing, low latency and reliable data transmission and fast data processing. ML is envisaged to support new capabilities for data fusion. Table 11 summarizes the characteristics and applications of ML-assisted multi-source data fusion techniques in mission critical IoUT (Hou et al., 2021). In (Coutinho, 2020), RWL Coutinho shed light on the design of ML algorithms to boost data delivery and autonomous control of IoUT network parameters. He discussed different proposed methods for IoUT network management and how ML models enhance such solutions at various networking layers. At the physical layer, ML can be used to design solutions for adaptive modulation in IoUT and optimize physical layer parameters. While at the network layer, ML has been proposed to identify the next hop or suitable routing path. Machine learning can also solve various problems such as energy efficiency, accuracy for training and testing patterns and resource allocation (El-Banna et al., 2019).
Intelligent reflecting surfaces in IoUT
Intelligent reflecting surface (IRS) is an emerging revolutionary novel paradigm which supports smart, reconfigurable, secure and intelligent radio propagation for next generation wireless networks (Wu & Zhang, 2019). In general, IRS is a large array comprised of a large number of scattering elements which can incur an additional phase shift to the incident waves such that the reflected waves can be added coherently at the receiver. Each element of IRS can separately control phase, amplitude and frequency of impinging signal. Through densely deploying IRS and smartly controlling signal reflections, we can smartly reconfigure the radio wave propagation between transceivers to attain required distributions. Hence, it provides innovative solutions to mitigate fading and interference impairments by a significant enhancement in capacity and reliability of wireless networks.
IRS enables several advantages such as it can reflect the incident signals without any transmit power requirements, thereby reducing energy consumption and hardware cost as compared to active surfaces (Wu et al., 2021). In addition, IRS has several other appealing benefits such as conformal geometry, less weight and light fabrication which makes its integration easier within any object or environment. Besides, the transparent integration of IRS enables high flexibility and compatibility with existing wireless communication techniques such as free space optics (FSO), wireless fidelity (WiFi) and light fidelity (LiFi). Finally, IRS operates in full-duplex (FD) mode and it is free from self-interference and antenna noise issues. All these factors make IRS a preferable candidate for colossal deployment in wireless networks to gain cost-effective improvement in both energy and spectral efficiency.
In underwater medium, optical or electromagnetic (EM) wave propagation is possible over a short distance while larger transmission distances can be obtained through acoustic waves in the context of IoUT. If we consider acoustic wave propagation, it highly suffers from scattering at uneven surfaces, water species and water streams. It leads to high path loss, thus it can tolerate only narrow signal bandwidths. Ultimately, it reduces the effective data rate. These challenges can be overcome by IRSs. Figure 8 illustrates the integration of IRS in underwater scenario. IRS can help to steer the signal in the desired direction which can reduce the multipath effect. Although it is not possible to complete remove the multipath, however IRS scattering elements can be optimized to reduce the frequency selectivity and thus effective signal bandwidth can be enhanced. IRS can be deployed in underwater medium in different configurations according to the location and application scenario (Kisseleff et al., 2020). It can be placed on the shore, attached to AUVs or it can float below the water surface. AUVs are suitable to carry IRSs. This integration of IRSs and AUVs can offer steerable signal propagation using phase shift potentials of IRS along with the mobility of these autonomous underwater vehicles. IRSs can be integrated on a small area of AUVs in order to achieve its capabilities in addition to preserving the control over the smart environment and reducing any possible harmful effect.

IoUT assisted by IRS
Another deployment strategy is floating sphere type IRS. In the context, IRS can be attached to the ground via cable as shown in Fig. 8. This strategy supports IRS placement at the required depths and positions. This floating spherical IRS can reflect signals in all directions which seems a novel promising design for future research works. In this scenario, other geometric bodies can also be taken into account according to the specific application. In sphere type IRS, the number of reflective elements involved to steer the signals in the same direction is reduced as compared to planar IRS. Although the size of sphere IRS geometry is larger than planar IRS. However, it also offers an appealing advantage to compensate this drawback e.g., the operation of IRS independent to its orientation. This property has several advantages in underwater environment due to potential rotational motion of IRS in water streams or after collisions with different objects.
Applications of IoUT
In the past decade, researchers have investigated several potential applications of IoUT (Alippi et al., 2010; Khaledi et al., 2014; Marin-Perez et al., 2012; Manjula & Manvi, 2013). CC Kao et al. (Kao et al., 2017a) classified IoUT applications in five types: (1) underwater exploration; (2) environmental monitoring; (3) military; (4) disaster prevention; and (5) others as shown in Fig. 9. IoUT can be used for archeological expeditions, underwater data collection, aquatic education, tsunami detection, oil and gas pipeline monitoring, pollution detection and water quality monitoring etc. In this section, we have discussed some important applications of IoUT.

Applications of IoUT (Kao et al., 2017a)
Underwater exploration
IoUT can be used to discover lost-treasures in underwater environment. For example, AUVs were used to discover Titanic in 1985. IoUT concept can be used to track marine species. IoUT is also useful for underwater natural-resource discovery such as coral reefs, metals and minerals. In (Davis & Chang, 2012), authors provided an overview of UWSN architectures to assist unmanned underwater exploration. Authors revealed that several lost-treasures were discovered by using UWSNs. In (Srinivas et al., 2012), authors developed advanced communication techniques to explore underwater environment with sensor modules and video capturing devices. In (Suzuki et al., 2014), T Suzuki et al. developed WSN system to investigate coral ecological activities. Authors designed a prototype and conducted experiments along Okinawa coast in Japan to observe the coral reefs.
Aquatic animal tracking
Animals tracking in oceans helps to protect marine species. Extinct and endangered species are harmful for humans as well. When any species dies then it disrupts the food chain and blue ecosystem. Previously, scientists need to catch any animals they had tagged to retrieve the data. The advancement in IoUT is overcoming these challenges. Acoustic tags are used to transmit acoustic waves which can travel in water better than conventional radio waves. Ocean buoys receive these acoustic waves and forward the data via satellite communications. Marine researchers and companies exploring this technique must be careful to only use acoustic signals to reduce the wave frequencies and intensity without damaging marine species. Another promising approach is to utilize mobile transceivers for animals tracking. These IoUT objects are placed over big sea animals. As these animals swim, these transceivers do not only record data but also collect data from any other tagged animals which come into their proximity. The data collected from these IoUT devices includes speed of movement, heart rate, temperature and location. This data helps to make intelligent decisions to treat our aquatic environment wisely. Similarly, pop-up satellite tags are also emerging recent developments. These tags detach from the aquatic animal after a specific time period and float on ocean surface, making is convenient for conservationists and scientists to gather them.
Environmental monitoring
The rapidly expanding human activities have destroyed marine environment. Consequently, environmental monitoring such as oil and gas monitoring, temperature monitoring, pressure monitoring, thermal pollution monitoring, biological and chemical pollution monitoring and water quality monitoring by using UWSNs has become a promising application of IoUT. Pollution of water can cause several diseases to human and animals. Early detection for water pollution is useful to carry out suitable measures to avoid critical situations. Traditional marine environment monitoring systems using vessels are time consuming and expensive and has a low resolution in both space and time. WSNs have emerged as promising alternative due to several advantages such as low cost, real-time monitoring, easy deployment and autonomous operation. In (Lakshmikantha et al., 2021), authors reviewed several works dedicated on smart water pollution monitoring. This study also proposes an efficient and cost effective IoT based smart water quality monitoring system. Furthermore, CZ Myint et al. (Myint et al., 2017) proposed WSN based reconfigurable water quality monitoring system in IoT. The proposed system collects water quality data such as CO2, turbidity, water level and pH. In (Xu et al., 2014), G Xu et al. presented a comprehensive review on WSN technologies for marine environment monitoring. This study briefly discusses techniques, systems, projects and algorithms. It also outlines opportunities and challenges in research, development and deployment of WSNs in marine environmental monitoring.
Water quality monitoring
Water is an important resource which decides the existence of humans and other living creatures in this universe. However, water sources are in a great state of shortage and polluted. Water pollution has become a serious problem in developed as well as developing countries due to inadequate measures to protect water environment. Water pollution occurs when harmful substance like chemicals dissolve, suspend or deposit into water bodies like lakes, rivers and seas (Chau et al., 2021). Therefore, water quality monitoring is of paramount significance to protect the web of life on earth. For this purpose, water quality sensor networks are randomly deployed in water bodies to gather data through sensor nodes. This collected data is forwarded to the host node and distributed in the environment sensor network. Depending on the different application scenarios, physical, chemical or biological sensors are used to measure water quality monitoring parameters. These sensors are used to find different parameters like dissolved oxygen level, salinity, conductivity, turbidity, pH, pressure and temperature. The ocean ecosystem is damaged by the chemicals and waste discharged in the oceans. Thus, it is essential to adopt a large-scale real-time monitoring system to preserve water quality. It will assist functional agencies and regulatory bodies to take timely solutions to assess the state of ocean ecosystems. IoUT has become an indispensable trend to protect water quality and species. With the presence of high speed connections, sensors, big data devices and processing units, IoUT can precisely manage water quality monitoring. IoUT devices can significantly reduce maintenance and labor cost due to autonomous operations and enhance administrative efficiency in water quality control (Vo et al., 2021). In a recent study, researchers used IoT communication system to design a smart water monitoring system through underwater sensors. The system is comprised of sensors, underwater connectors, cell antenna, rechargeable battery and a surface buoy as shown in Fig. 10. This system can measure water depth, temperature, salinity, dissolved oxygen and pH, all of this data is updated to a public repository available to researchers around the globe (Bresnahan et al., 2020).

Example of water quality monitoring system (Bresnahan et al., 2020)
Military
The military reflects the strength of any country to protect itself from any terrestrial or underwater attacks. IoUT can be implemented for defense purpose and can be applied for underwater surveillance systems, underwater mine detection and submarine detection. These applications make IoUT a key component of future naval missions. Authors in (Manjula & Manvi, 2013) investigated the design of sensor deployment and optimization scheme for monitoring coverage. The proposed scheme makes use of Particle Swarm Optimization (PSO) to find the location of sensor nodes by taking attenuation, transmission range and water depth into account. Authors validated the proposed scheme in terms of required number of nodes and monitoring coverage. In (Khaledi et al., 2014), Khaledi et al. discussed the design of underwater mine detection systems. Authors used five towering vehicle alternatives and two sonar alternatives. A computed model was used to simulate the mine detection process and test each design. Authors also took detection probability, fuel economy, speed and safety concerns into account in order to analyze the best alternative. In (Cayirci et al., 2006), authors proposed a novel UWSN architecture to maximize the surveillance coverage.
Disaster prevention
Another crucial application of IoUT is disaster prevention. It is an important application to preserve human life against calamities. Underwater natural disasters are highly dangerous. In order to prevent such disasters, IoUT is extensively used to detect tsunami, earthquake, flood along with early predictions and warning services. UWSNs can be used for tsunami prediction and seismic monitoring. Authors in (Marin-Perez et al., 2012) proposed a design of a real-time measurement system using several devices for flood monitoring in Spain. Testing results show that the proposed system is robust and energy efficient. In (Casey et al., 2008), K Casey et al. discussed several approaches for tsunami detection along with proposing an efficient architecture. The designed system uses seismic pressure sensors to predict tsunami. In (Coutinho et al., 2020), authors focus on IoUT for underwater humanitarian applications. Authors discuss the use of IoUT for humanitarian needs such as accessing scientific data, relieving in global warming and mitigating disasters. Authors also described challenges for water sensing, underwater communication and envisioned future research directions.
IoUT and UWSN can be used as humanitarian technologies to assist in humanitarian ventures, prevent disasters and support in search and rescue missions. Recent advancements in UWSNs and IoUT have strengthened the potentials of these technologies to support humanitarian applications in marine environment as shown in Fig. 11. AUVs and UWSNs can help to deal with catastrophic incidents such as search for the Malaysia Airline Flight 370 and Air France Flight 447 which crashed into the Indian and Atlantic Ocean respectively. Similarly, IoUT will support autonomous operations of large scale ocean monitoring and data collection from aquatic environments for humanitarian applications. These operations include eco-friendly floats, fault-tolerant and robust underwater sensors, efficient underwater communication and cost-effective ocean missions. IoUT can also be used for immediate detection, monitoring and prevention of disaster including oil spills, tsunami and earthquakes.

Example of underwater humanitarian applications (Coutinho et al., 2020)
Self-powered IoUT devices
Using optical beams to deliver both power and information is suggested as a promising technology to solve battery charging issues in future generation IoT and IoUT devices. Battery charging of underwater devices is a critical issue associated with network lifetime. Since recharging underwater devices is highly risky, difficult and costly so simultaneous lightwave information and power transfer (SLIPT) has been introduced as an efficient and promising alternative for both communication and wireless power transfer (Diamantoulakis et al., 2018). SLIPT can meet the every-growing data rate and energy consumption requirements of IoT and IoUT. Several studies on SLIPT have been proposed which can be achieved by using infrared or visible light communication system (Pan et al., 2019; Diamantoulakis & Karagiannidis, 2017). Visible light has the capability to meet illumination requirement along with high-speed data links. VLC signals can be harvested by energy-constrained IoT terminals such as portable devices and indoor services. In (de Oliveira Filho et al., 2020), authors overview several SLIPT techniques in space, power and time domain. Authors demonstrated two SLIPT techniques for underwater environment and discussed hardware and deployment challenges. SLIPT is a cost effective solution for autonomous self-powered devices and remote sensors. It is very promising in RF-sensitive environments such as aerospace, smart house, hospitals etc. SLIPT can power IoUT devices. This application can support self-powering of IoUT devices for underwater exploration, offshore oil exploration, undersea earthquake monitoring, scientific data collection, pollution tracking and marine life protection. While providing various benefits, self-powered IoUT devices face scheduling and routing challenges. Scheduling and routing protocol must provide a compromise between latency and energy efficiency. Another challenging issue the reliance of IoUT network lifetime on nodes’ batteries. Thus, integrating energy harvesting capability to network nodes will significantly prolong the IoUT network lifetime.
Underwater pipeline monitoring
The economic advantages of underwater pipelines to transfer water, oil and gas has led several companies to design novel and secure underwater pipeline architectures. A reliable monitoring system can significantly improve inspection process of these pipelines. A joint architecture of AUVs and sensors can be used for underwater exploration and inspection such as detection and control of oil spills at pipelines. Underwater sensors are placed inside and outside pipelines. Sensors located inside pipelines are used to measure speed of oil and pressure. While sensors located outside pipelines can float freely or placed at fixed positions. Different localization techniques have been developed to predict their locations. The sink receives this data from sensors and forwards to the base station or monitoring center. Acoustic sensors are used to find the location of AUVs used for underwater pipelines information collection. Although AUVs play an excellent role for endurance undersea missions, however, divers are still needed due to their manual abilities to assemble marine structures. However divers can suffer from risk and stress as they are exposed to ocean currents, dark zones and high pressure. To overcome these issues, several underwater smart devices have been introduced. For instance, an Underwater Augmented Reality (UWAR) system can help divers to find work site location and assist repairing (Morales et al., 2009). Advance technology of augmented reality (AR) can assist divers in visibility and understand surroundings. Divers can use acoustic tags to know their positions and other divers in those scenarios where visibility is lost. Acoustic phones or optical wireless communication systems can be used to send audio texts in underwater environment. All these aforementioned technologies can assist marine experts for efficient monitoring of underwater pipelines as oil/gas industries have started exploring harsh deep water environments.
In (Mohamed et al., 2010), authors discussed different sensor network architectures for underwater pipeline monitoring. These architectures include underwater wired sensor networks, RF wireless sensor networks, underwater acoustic wireless sensor networks, integrated wired/RF and integrated wired/acoustic wireless sensor network. Authors highlighted advantages, disadvantages and reliability characteristics of these network architectures. Some of these architectures are as follows:
-
1)
Underwater Wired Sensor Networks
Currently, most of the pipeline sensors are linked through wired networks. These wired networks are fiber optic or copper cables. These networks are linked with sensors used to measure specific parameters like mobility, vibration, sound, temperature and pressure. The wires are not used for communication only but to provide electrical power to network entities including actuators and sensors.
-
2)
Underwater Acoustic Wireless Sensor Networks
Acoustic sensors can be used in underwater pipeline monitoring systems. Wireless networks can tackle some reliability problems of wired networks. For instance, wireless network can operate even some nodes are disabled. Sensor nodes are fault tolerant as available nodes can easily replace faulty ones. In wireless networks, designers should give focus on power and energy constraints. Intelligent scheduling schemes are required to optimize power consumption.
-
3)
RF Wireless Sensor Networks
Another architecture used for underwater pipeline monitoring is RF wireless sensor network. In this architecture, each sensor node is linked with a surface buoy through wires. Radio transceivers are located on the surface buoy. In this way, node can communicate using RF channels with better communication bandwidth, connectivity, bit error rate, low propagation delay and less power consumption as compared to underwater acoustic wireless sensor network. In addition, solar panels can be integrated with surface buoys to provide energy for communication and sensing devices. Although this architecture offers several benefits over acoustic wireless sensor network, however it suffers from security challenges. For example, cables and surface buoys can be damaged by passing ships.
Realization of the Smart Ocean
Due to the abundant marine resources, smart ocean has drawn focus of government, research groups and industrial bodies. The term smart ocean is extensively used in ocean activities such as smart underwater intrusion detection, smart reconnaissance, smart disaster warning, smart underwater tourism, smart blue economy, smart underwater resource exploration, smart underwater navigation, smart deepsea observation, smart ocean renewable energy, smart ports market, smart marine industry, smart ocean cleaner and smart ocean pollution monitoring (Qiu et al., 2019). It can assist researchers and marine experts to understand the harsh aquatic nature more comprehensively, protect the ocean more intelligently, govern the ocean properly and use the ocean resources and potential smartly. The smart ocean requires IoUT to transfer, analyze, process and protect important marine data. IoUT has become a powerful technology to achieve smart ocean by its intelligent computing capabilities. In future, IoUT is envisaged to bridge diverse technologies for sensing the ocean, empowering it to become smart ocean. The realization of smart ocean depends on IoUT related research topics including: security, cooperative computing, underwater networking, underwater wireless communication and standardization. In (Wang et al., 2021), C Wang et al. proposed an underwater robotic platform integrated with several sensing devices to design a reliable data collection system for IoUT. Authors comprehensively discussed mechatronics design, modeling, fabrication, simulation and experimental setup of a robotic IoUT platform to enable the smart ocean. In another recent study, C Hu et al. (Hu et al., 2020) proposed an efficient, secure, and complete data collection, data transfer and storage mechanism for IoT in smart ocean. The proposed data collection pattern and IoT framework can resist single point failure attack. The acceleration of research studies on these research topics related to IoUT will significantly contribute in smart ocean developments including safe and clean marine shipping, building partnership between indigenous and coastal communities, enhancing marine safety and protecting marine life.
Challenges and Future Directions in IoUT
The existing pace of research findings and developments on IoUT is slow due to several challenges in UWSNs. Specially, the major challenge in IoUT is the difference between TWSNs and UWSNs. First, UWSNs depend on acoustic communication rather than radio communication as radio waves are quickly absorbed by water. Second, acoustic channel speed is very lower as compared to radio channels. Therefore, end-to-end delay will become another hurdle in UWSNs. Third, the transmission range of UWSNs is longer than TWSNs. Consequently, it may cause collision and interference during the data transmission. Fourth, transmission speed is low due to narrow bandwidth of acoustic communication. Fifth, energy efficiency is a crucial challenge in IoUT. Sixth, underwater sensors suffer from topology change. Seventh, link reliability is low and unstable in underwater environment. Several research studies (Domingo, 2012; Kao et al., 2017a; Okereke et al., n.d.) have reported these challenges as reliability, dynamic topology, narrow bandwidth, energy consumption and propagation delay. Next, we have discussed some of the major challenges from the viewpoint of reliability, mobility, energy storage, lack of standardization, transmission range, transmission media and communication.
Communication
The EM spectrum dominates communication technologies outside water as it contains optical and radio waves which offer long distance coverage with low power and high bandwidth. However, inside water EM signals are high absorbed and limited distance range requiring large antenna size or high power. On the other hand, acoustic signals are preferred for underwater communication due to longer ranges. These waves are constrained by low speed of sound, distance-dependent bandwidth and time-varying multipath propagation. Underwater acoustic communication is restricted by high propagation delay, Doppler spread, multipath, noise and path loss. All the factors are challenging in communication in IoUT networks.
Energy storage and consumption
Energy storage and utilization is the foremost issue in terrestrial and underwater sensor networks and IoUT objects. Sensor nodes and communication systems require high power due to very large transmission distance in IoUT. Thus, energy efficient algorithms are required to prolong network lifetime as conventional energy solutions for UWSN are insufficient for IoUT. IoUT nodes and devices have limited respources. IoUT network is based on battery powered sensors with a limited amount of energy. As replenish or recharging of the battery is difficult, therefore, nodes failure occurs mostly due to low battery endurance of underwater devices. Hence, energy efficient networking or energy harvesting solutions are needed for IoUT. Moreover, the conventional energy sources such as ocean current power generation, piezoelectric and solar energy cannot be applied to extend IoUT lifetime. These challenges also affect network reliability which is often energy intensive. Thus, to tackle the battery challenges in IoUT, it is crucially important to design an autonomous recharging mechanism or undersea battery or deploy battery-free nodes.
Mobility and reliability
For any UWSN, sensor node operations are carried out in mobile conditions. Underwater operational nodes are impacted by position adjustment and topology changes due to water currents at short durations repeatedly. These mobility issues are severe in shallow waters as compared to deep water. These issues result in high latency which ultimately leads to network failure. In IoUT, specially designed mobility models are required to overcome these challenges.
Lack of standardization
In order to address interoperability, IoUT has stringent desiderata of standard frameworks. Currently, there is no existing standardization for IoUT. It makes heterogeneity of technologies, network entities and services very challenging. There exists a strong desideratum to offer interoperability between heterogeneous underwater objects for IoUT. Moreover, gateways are also needed to provide communication between IP-based networks and underwater sensors.
Transmission medium
Acoustic waves are mostly used in underwater communication system due to longer transmission range. However, they can only be used for low data rate services. Therefore, optical signals have been used as an alternative to enhance the data rate. However, optical waves have some limitations including direction communication and low transmission range. Thus, transmission medium can be chosen according to the application scenario of IoUT. For instance, optical signals can be used to support low latency, high data rate and reliable communication at short ranges. In contrast, acoustic signals can be utilized for long distance communication at the expense of low data rate and higher latency.
Latency
The commercially available modems use acoustic waves for underwater communication whose transmission speed is much lower than terrestrial IoT. Therefore, real-time communication in IoUT is restricted by low speed of acoustic waves. The development of optical modems with low latency can support real-time communications. However, the research on optical modems is still at infancy and efforts are required for their developments.
Sparse and high-maintenance sensing devices in IoUT
The sensors of IoUT network are sparsely deployed and their performance is degraded by environmental effects. The harsh environment and spare configuration results in high maintenance cost of IoUT. Explicitly, maintenance must overcome the effects of pollution, sediments, corrosion and erosion. A compelling solution to mitigate the high maintenance cost of IoUT is to integrate self-management capability (Atyabi et al., 2018) e.g., self-configuration, self-evaluation and autonomous reports to operating bodies. Therefore, smart ML-based nodes with self-control and decision making strategies are promising research contributions in IoUT.
IoUT for humanitarian applications
The existing underwater humanitarian applications use limited UWSN architectures. One major issue in this field is to develop IoUT, which can support remote and autonomous data collection in underwater environments, such as for earthquake and tsunami detection. For this purpose, the DARPA’s Strategic Technology Office has started Ocean of Things funding program to facilitate analytical approaches to enable ocean sensing at high resolution and large scale (Coutinho et al., 2020). The data analytics approaches will process and visualize the data along with new associations in data, identification of novel signatures and multimode detection of targets. The program aims to support development of floats for periodic sensing of ocean parameters. These floats will be capable to identify and collect data while dealing energy and communication features. In addition, it will enhance the performance in terms of power consumption, biofouling reduction, motion control and sampling rates. Apart from these benefits, there are some challenges which must be addressed to develop IoUTs for underwater humanitarian applications such as stable connectivity, network deployment, energy-efficient operation, data routing and data aggregation. To ensure connectivity, topology control algorithms can be used which can move the underwater nodes placed in shadow zones to new depths. The controlled depth adjustment can ensure suitable coverage and guarantees network connectivity. In this way, prompt alerts of critical events like tsunami and earthquakes can be detected and prevention measures can be taken against possible catastrophic consequences. To overcome the daunting challenge of data routing, opportunistic routing and void-handling algorithms can be used to improve the overall network’s performance. Similarly, research fraternity needs to find novel strategies for packet reduction in IoUT which cannot only reduce the energy consumption but it can also prolong the lifetime of IoUT-based humanitarian applications.
IoUT security issues
Generally, UWSNs are weak in nature due to longer propagation delays and acoustic communication models. In addition, it is hard to use existing security and access control mechanisms for UWSNs. Therefore, it is crucially essential to develop novel strategies to develop a secure network architecture. Existing techniques do not fulfill security requirements due to lack in privacy and security measures. A secure encryption technique with low computational overheads establishes the foundation of IoUT. Any layer of IoUT can suffer from malicious threats such as jamming, wormhole, Sybil, sinkhole, blackhole, spoofing and flooding which can steal from valuable network users or it can damage the whole network. In case of energy depletion, it will prevent system failure or shut down. Moreover, there is risk of data to be stolen while communication between nodes which leads to eavesdropping and tapping attacks. To mitigate these security risks, mutual authentication techniques can be implemented to preserve authenticity of data and prevent eavesdropping. Similarly, standard encryption algorithms and blockchain-based mechanisms can be used to preserve key security requirements such as integrity, authentication, availability and confidentiality. We can conclude that designing a strong and robust security mechanism is a promising research direction for IoUT network. This security mechanism should include quality of service (QoS), availability, integrity, confidentiality and high-level security architecture to prevent IoUT nodes from possible attacks such as jamming, spoofing, routing, denial-of-service (DoS). Similarly, data privacy is also extremely critical in IoUT network as it can include sensitive data in military and naval missions such as submarine tracking, identity sharing and secret operations. As the IoUT environment is adverse, it is hard to apply the privacy techniques of terrestrial IoT such as differential privacy, t-closeness, 1-diversity and k-anonymity. Therefore, it is essential to tackle privacy issues in important IoUT applications such as tracking, navigation and diverse network. It is also crucial to keep user privacy, device privacy, data privacy and location privacy in IoUT. Thus, researchers should investigate lightweight privacy models for IoUT networks by considering privacy models in terrestrial IoT networks.
Conclusion
The recent developments in IoT technology and the use cases of its impact both to coastal and wide oceans has led to the proliferation of smart interconnected objects both in terrestrial and marine applications. These technical developments brought the novel concept of IoUT designed by underwater sensing devices, hydrophones, cameras, etc. This novel concept of IoUT opens a new era of scientific research for ocean data processing, big marine data handling, data acquisition and communication. In this study, we commenced by surveying evolution of IoUT and relevant research studies. We have surveyed most recent articles in both software and hardware aspects of IoUT. We briefly explained various technologies such as magnetic induction, optical, RF and acoustic for IoUT. The possible architecture and network layers to design IoUT network are presented in this study. We examine channel models, routing protocols, networking topologies and simulation tools. Furthermore, we discussed recent advancements in IoUT in terms of smart devices, consumer electronics, communication and role of AUVs. In addition, edge computing, optical wireless communication, data analytics, blockchain and machine learning were viewed as promising techniques to support IoUT. We also discussed most recent frontier research investigations and integration of emerging IRS technology with IoUT. We have dedicated a complete section to application of IoUT such as underwater observation, marine exploration, environmental monitoring, pipeline monitoring, military, disaster mitigation and self-powered IoUT devices. We also envision IoUT as worldwide network of smart ocean. Finally, numerous open challenges and future directions were presented. We highly recommend research fraternity to contribute in this vibrant interdisciplinary research area for ground-breaking innovations. In this regard, we believe this survey will be helpful to aggregate the research efforts and eliminate the technical uncertainties towards breakthrough novelties of IoUT.
References
Abdillah AF, Berlian MH, Panduman YYF, Akbar MAW, Afifah MA, Tjahjono A et al (2017) Design and development of low cost coral monitoring system for shallow water based on internet of underwater things. J Telecommun Electron Comput Eng (JTEC) 9(2–5):97–101
Addison PFE, Collins DJ, Trebilco R, Howe S, Bax N, Hedge P, Jones G, Miloslavich P, Roelfsema C, Sams M, Stuart-Smith RD, Scanes P, von Baumgarten P, McQuatters-Gollop A (2018) A new wave of marine evidence-based management: emerging challenges and solutions to transform monitoring, evaluating, and reporting. ICES J Mar Sci 75(3):941–952
Ahmed E, Yaqoob I, Hashem IAT, Khan I, Ahmed AIA, Imran M, Vasilakos AV (2017) The role of big data analytics in internet of things. Comput Netw 129:459–471
Akyildiz IF, Pompili D, Melodia T (2005) Underwater acoustic sensor networks: research challenges. Ad Hoc Netw 3(3):257–279
Akyildiz IF, Wang P, Sun Z (2015) Realizing underwater communication through magnetic induction. IEEE Commun Mag 53(11):42–48
Akyildiz IF, Wang P, Lin SC (2016) SoftWater: software-defined networking for next-generation underwater communication systems. Ad Hoc Netw 46:1–11
Al-Bzoor M, Al-assem E, Alawneh L, Jararweh Y (2021) Autonomous underwater vehicles support for enhanced performance in the internet of underwater things. Trans Emerg Telecommun Technol 32(3):e4225
Alippi C, Camplani R, Galperti C, Roveri M (2010) A robust, adaptive, solar-powered WSN framework for aquatic environmental monitoring. IEEE Sensors J 11(1):45–55
Alostad JM (2020) Reliability in IoUT enabled underwater sensor networks using dynamic adaptive routing protocol. Int J Internet Manuf Serv 7(1–2):115–129
Atyabi A, MahmoudZadeh S, Nefti-Meziani S (2018) Current advancements on autonomous mission planning and management systems: an AUV and UAV perspective. Annu Rev Control 46:196–215
Berlian MH, Sahputra TER, Ardi BJW, Dzatmika LW, Besari ARA, Sudibyo RW, Sukaridhoto S (2016, September) Design and implementation of smart environment monitoring and analytics in real-time system framework based on internet of underwater things and big data. In 2016 international electronics symposium (IES). IEEE p 403-408
Bhattacharjya K, De D (2021) IoUT: modelling and simulation of edge-drone-based software-defined smart internet of underwater things. Simul Model Pract Theory 109:102304
Blix K, Eltoft T (2018) Machine learning automatic model selection algorithm for oceanic chlorophyll-a content retrieval. Remote Sens 10(5):775
Bresnahan PJ, Wirth T, Martz T, Shipley K, Rowley V, Anderson C, Grimm T (2020) Equipping smart coasts with marine water quality IoT sensors. Results Eng 5:100087
Cai S, Zhu Y, Wang T, Xu G, Liu A, Liu X (2019) Data collection in underwater sensor networks based on mobile edge computing. IEEE Access 7:65357–65367
Casey K, Lim A, Dozier G (2008) A sensor network architecture for tsunami detection and response. Int J Distrib Sens Netw 4(1):27–42
Cayirci E, Tezcan H, Dogan Y, Coskun V (2006) Wireless sensor networks for underwater survelliance systems. Ad Hoc Netw 4(4):431–446
Celik A, Saeed N, Al-Naffouri TY, Alouini MS (2018, April) Modeling and performance analysis of multihop underwater optical wireless sensor networks. In: 2018 IEEE wireless communications and networking conference (WCNC). IEEE p 1-6
Celik A, Saeed N, Shihada B, Al-Naffouri TY, Alouini MS (2020) A software-defined opto-acoustic network architecture for internet of underwater things. IEEE Commun Mag 58(4):88–94
Chau, M. Q., Truong, T. T., Hoang, A. T., & Le, T. H. (2021). Oil spill cleanup by raw cellulose-based absorbents: a green and sustainable approach. Energy Sources, Part A: Recovery, Utilization, and Environmental Effects, 1–14. https://www.tandfonline.com/doi/full/10.1080/15567036.2021.1928798?casa_token=PyMJqFZAQYMAAAAA%3A42pFgMYJqpouNIS8XArQMfzeDJipUaqiLoi7B1m9UFviVeWUzjn02YHk5-QRMaz-eIGh5jo3ZAxUaw
Cheng X, Shu H, Liang Q, Du DHC (2008) Silent positioning in underwater acoustic sensor networks. IEEE Trans Veh Technol 57(3):1756–1766
Coutinho RW (2020, November) Machine learning for self-adaptive internet of underwater things. In: Proceedings of the 10th ACM symposium on design and analysis of intelligent vehicular networks and applications. p 65-69
Coutinho RW, Boukerche A, Vieira LF, Loureiro AA (2020) Underwater sensor networks for smart disaster management. IEEE Consum Electron Mag 9(2):107–114
Davis A, Chang H (2012, October) Underwater wireless sensor networks. In: 2012 oceans. IEEE p 1-5
de Oliveira Filho JI, Trichili A, Ooi BS, Alouini MS, Salama KN (2020) Toward self-powered internet of underwater things devices. IEEE Commun Mag 58(1):68–73
de Souza FA, Chang BS, Brante G, Souza RD, Pellenz ME, Rosas F (2016) Optimizing the number of hops and retransmissions for energy efficient multi-hop underwater acoustic communications. IEEE Sensors J 16(10):3927–3938
Delphin Raj KM, Lee J, Ko E, Shin SY, Namgung JI, Yum SH, Park SH (2020) Underwater network management system in internet of underwater things: open challenges, benefits, and feasible solution. Electronics 9(7):1142
Demirors E, Shi J, Duong A, Dave N, Guida R, Herrera B, ..., Melodia T (2018, August) The seanet project: Toward a programmable internet of underwater things. In 2018 Fourth Underwater Communications and Networking Conference (UComms). IEEE p 1–5
Demirors E, Shankar BG, Santagati GE, Melodia T (2015) SEANet: A software-defined acoustic networking framework for reconfigurable underwater networking. In Proceedings of the 10th International Conference on Underwater Networks & Systems (pp. 1-8). https://dl.acm.org/doi/abs/10.1145/2831296.2831316?casa_token=Cw_b_jVmC4MAAAAA:6sVsJpcCvVZcj6ufzX3S42VHLxpxouaFJTz7Q_EGhh-3FNRBnUFIAUjkt4A0WqA5aIdSnq_yIjkD4g
Diamant R, Lampe L (2012) Underwater localization with time-synchronization and propagation speed uncertainties. IEEE Trans Mob Comput 12(7):1257–1269
Diamantoulakis PD, Karagiannidis GK (2017, December) Simultaneous lightwave information and power transfer (SLIPT) for indoor IoT applications. In: GLOBECOM 2017-2017 IEEE global communications conference. IEEE p 1-6
Diamantoulakis PD, Karagiannidis GK, Ding Z (2018) Simultaneous lightwave information and power transfer (SLIPT). IEEE Trans Green Commun Netw 2(3):764–773
Domingo MC (2012) An overview of the internet of underwater things. J Netw Comput Appl 35(6):1879–1890
Dorathy I, Chandrasekaran M (2018) Simulation tools for mobile ad hoc networks: a survey. J Appl Res Technol 16(5):437–445
El-Banna AAA, Zaky AB, ElHalawany BM, Huang JZ, Wu K (2019, June) Machine learning based dynamic cooperative transmission framework for IoUT networks. In: 2019 16th annual IEEE international conference on sensing, communication, and networking (SECON). IEEE p 1-9
Fang Z, Wang J, Jiang C, Zhang Q, Ren Y (2021a) AoI inspired collaborative information collection for AUV assisted internet of underwater things. IEEE Internet Things J 8:14559–14571
Fang Z, Wang J, Jiang C, Du J, Hou X, Ren Y (2021b, June) Heterogeneous multi-AUV aided green internet of underwater things. In: ICC 2021-IEEE international conference on communications. IEEE p 1-6
Fernández-Caramés TM, Fraga-Lamas P (2018) A review on the use of Blockchain for the internet of things. IEEE Access 6:32979–33001
Gjanci P, Petrioli C, Basagni S, Phillips CA, Bölöni L, Turgut D (2017) Path finding for maximum value of information in multi-modal underwater wireless sensor networks. IEEE Trans Mob Comput 17(2):404–418
Gkoura LK, Roumelas GD, Nistazakis HE, Sandalidis HG, Vavoulas A, Tsigopoulos AD, Tombras GS (2017) Underwater optical wireless communication systems: a concise review. In turbulence modelling approaches–current state, Development Prospects, Applications. InTech
Gopinath MP, Tamizharasi GS, Kavisankar L, Sathyaraj R, Karthi S, Aarthy SL, Balamurugan B (2019) A secure cloud-based solution for real-time monitoring and management of internet of underwater things (IOUT). Neural Comput Appl 31(1):293–308
Gussen CM, Diniz PS, Campos M, Martins WA, Costa FM, Gois JN (2016) A survey of underwater wireless communication technologies. J Commun Inf Syst 31(1):242–255
Hammi MT, Bellot P, Serhrouchni A (2018, April) BCTrust: a decentralized authentication blockchain-based mechanism. In: 2018 IEEE wireless communications and networking conference (WCNC). IEEE p 1-6
Han G, Li S, Zhu C, Jiang J, Zhang W (2017) Probabilistic neighborhood-based data collection algorithms for 3D underwater acoustic sensor networks. Sensors 17(2):316
Hao K, Yu K, Gong Z, Du X, Liu Y, Zhao L (2020) An enhanced AUV-aided TDoA localization algorithm for underwater acoustic sensor networks. Mob Netw Appl 25:1673–1682
He M, Liu F, Miao Z, Zhou H, Chen Q (2017) A mechanism of topology optimization for underwater acoustic sensor networks based on autonomous underwater vehicles. Int J Distrib Sens Netw 13(1):1550147716686979
Hou X, Wang J, Fang Z, Zhang X, Song S, Zhang X, Ren Y (2021) Machine-learning-aided Mission-critical internet of underwater things. IEEE Netw 35(4):160–166
Hu C, Pu Y, Yang F, Zhao R, Alrawais A, Xiang T (2020) Secure and efficient data collection and storage of IoT in smart ocean. IEEE Internet Things J 7(10):9980–9994
Huang D, Zhao D, Wei L, Wang Z, Du Y (2015) Modeling and analysis in marine big data: advances and challenges. Math Probl Eng 2015:1–13
Hughes TP, Kerry JT, Álvarez-Noriega M, Álvarez-Romero JG, Anderson KD, Baird AH, Babcock RC, Beger M, Bellwood DR, Berkelmans R, Bridge TC, Butler IR, Byrne M, Cantin NE, Comeau S, Connolly SR, Cumming GS, Dalton SJ, Diaz-Pulido G et al (2017) Global warming and recurrent mass bleaching of corals. Nature 543(7645):373–377
Jahanbakht M, Xiang W, Hanzo L, Azghadi MR (2021) Internet of underwater things and big marine data analytics—a comprehensive survey. IEEE Commun Surv Tutor 23:904–956
Jiang S (2017) State-of-the-art medium access control (MAC) protocols for underwater acoustic networks: a survey based on a MAC reference model. IEEE Commun Surv Tutor 20(1):96–131
Jin Z, Zhao Q, Luo Y (2020) Routing void prediction and repairing in AUV-assisted underwater acoustic sensor networks. IEEE Access 8:54200–54212
Jouhari M, Ibrahimi K, Tembine H, Ben-Othman J (2019) Underwater wireless sensor networks: a survey on enabling technologies, localization protocols, and internet of underwater things. IEEE Access 7:96879–96899
Kao CC, Lin YS, Wu GD, Huang CJ (2017a) A comprehensive study on the internet of underwater things: applications, challenges, and channel models. Sensors 17(7):1477
Kao CC, Lin YS, Wu GD, Huang CJ (2017b, May) A study of applications, challenges, and channel models on the internet of underwater things. In 2017 international conference on applied system innovation (ICASI). IEEE p 1375-1378
Kaushal H, Kaddoum G (2016) Underwater optical wireless communication. IEEE Access 4:1518–1547
Khaledi S, Mann H, Perkovich J, Zayed S (2014, April) Design of an underwater mine detection system. In: 2014 systems and information engineering design symposium (SIEDS). IEEE p 78-83
Khalil RA, Saeed N, Babar MI, Jan T (2020) Toward the internet of underwater things: Recent developments and future challenges. IEEE Consumer Electronics Magazine, 10(6), 32-37. https://ieeexplore.ieee.org/abstract/document/9090848/
Khan MTR, Ahmed SH, Kim D (2019a) AUV-aided energy-efficient clustering in the internet of underwater things. IEEE Trans Green Commun Netw 3(4):1132–1141
Khan MTR, Jembre YZ, Ahmed SH, Seo J, Kim D (2019b, December) Data freshness based AUV path planning for UWSN in the internet of underwater things. In: 2019 IEEE global communications conference (GLOBECOM). IEEE p 1-6
Kisseleff S, Chatzinotas S, Ottersten B (2020) Reconfigurable intelligent surfaces in challenging environments: underwater, underground, industrial and disaster. arXiv preprint arXiv:2011.12110
Krishnaraj N, Elhoseny M, Thenmozhi M, Selim MM, Shankar K (2020) Deep learning model for real-time image compression in internet of underwater things (IoUT). J Real-Time Image Proc 17(6):2097–2111
Lakshmikantha V, Hiriyannagowda A, Manjunath A, Patted A, Basavaiah J, Anthony AA (2021) IoT based smart water quality monitoring system. Global Transitions Proceedings 2:181–186
Li Y, Zhang Y, Li W, Jiang T (2018) Marine wireless big data: efficient transmission, related applications, and challenges. IEEE Wirel Commun 25(1):19–25
Li Y, Wang S, Jin C, Zhang Y, Jiang T (2019a) A survey of underwater magnetic induction communications: fundamental issues, recent advances, and challenges. IEEE Commun Surv Tutor 21(3):2466–2487
Li Z, Wang N, Li Y, Sun X, Huo M, Zhang H (2019b) Collective efficacy of support vector regression with smoothness priority in marine sensor data prediction. IEEE Access 7:10308–10317
Liang M, Su X, Liu X, Zhang X (2020) Intelligent Ocean convergence platform based on IoT empowered with edge computing. J Internet Technol 21(1):235–244
Lin C, Zhang G, Li J, Chen Y, Zhang Y, Li Y (2017, December) An application of a generalized architecture to an autonomous underwater vehicle. In: 2017 IEEE international conference on robotics and biomimetics (ROBIO). IEEE p 122-127
Lin C, Han G, Guizani M, Bi Y, Du J (2019) A scheme for delay-sensitive spatiotemporal routing in SDN-enabled underwater acoustic sensor networks. IEEE Trans Veh Technol 68(9):9280–9292
Liou EC, Kao CC, Chang CH, Lin YS, Huang CJ (2018, April) Internet of underwater things: challenges and routing protocols. In: 2018 IEEE international conference on applied system invention (ICASI). IEEE p 1171-1174
Liu J, Wang Z, Cui JH, Zhou S, Yang B (2015) A joint time synchronization and localization design for mobile underwater sensor networks. IEEE Trans Mob Comput 15(3):530–543
Liu J, Shou G, Liu Y, Hu Y, Guo Z (2018) Performance evaluation of integrated multi-access edge computing and fiber-wireless access networks. IEEE Access 6:30269–30279
Manjula RB, Manvi SS (2013, October) Coverage optimization based sensor deployment by using PSO for anti-submarine detection in UWASNs. In: 2013 ocean electronics (SYMPOL). IEEE p 15-22
Marin-Perez R, García-Pintado J, Gómez AS (2012) A real-time measurement system for long-life flood monitoring and warning applications. Sensors 12(4):4213–4236
Menaka D, Gauni S, Manimegalai CT, Kalimuthu K (2021) Vision of IoUT: advances and future trends in optical wireless communication. J Opt 50:1–14
Mohamed N, Jawhar I, Al-Jaroodi J, Zhang L (2010, September) Monitoring underwater pipelines using sensor networks. In: 2010 IEEE 12th international conference on high performance computing and communications (HPCC). IEEE p 346-353
Mohammadi R, Nazari A, Nassiri M, Conti M (2021) An SDN-based framework for QoS routing in internet of underwater things. Telecommun Syst, 1-14 78:253–266
Mohanty SP, Choppali U, Kougianos E (2016) Everything you wanted to know about smart cities: the internet of things is the backbone. IEEE Consum Electron Mag 5(3):60–70
Mohsan SAH, Amjad H (2021) A comprehensive survey on hybrid wireless networks: practical considerations, challenges, applications and research directions. Opt Quant Electron 53(9):1–56
Morales R, Keitler P, Maier P, Klinker G (2009, October) An underwater augmented reality system for commercial diving operations. In: OCEANS 2009. IEEE p 1-8
Morel A, Gentili B, Claustre H, Babin M, Bricaud A, Ras J, Tieche F (2007) Optical properties of the “clearest” natural waters. Limnol Oceanogr 52(1):217–229
Morozs N, Mitchell PD, Diamant R (2020) Scalable adaptive networking for the internet of underwater things. IEEE Internet Things J 7(10):10023–10037
Mortazavi E, Javidan R, Dehghani MJ, Kavoosi V (2017) A robust method for underwater wireless sensor joint localization and synchronization. Ocean Eng 137:276–286
Myint CZ, Gopal L, Aung YL (2017, June) WSN-based reconfigurable water quality monitoring system in IoT environment. In: 2017 14th international conference on electrical engineering/electronics, computer, telecommunications and information technology (ECTI-CON). IEEE p 741-744
Naderi M, Zajić AG, Pätzold M (2017a) A nonisovelocity geometry-based underwater acoustic channel model. IEEE Trans Veh Technol 67(4):2864–2879
Naderi M, Pätzold M, Hicheri R, Youssef N (2017b) A geometry-based underwater acoustic channel model allowing for sloped ocean bottom conditions. IEEE Trans Wirel Commun 16(4):2394–2408
NavaticsGlobal (2019) “Navatics mito underwater drone,” [Online]. Available: https://www.navatics.com/store-navatics/. Accessed 28 July 2021
Nayyar A, Ba CH, Duc NPC, Binh HD (2018, August) Smart-IoUT 1.0: a smart aquatic monitoring network based on internet of underwater things (IoUT). In: International conference on industrial networks and intelligent systems. Springer, Cham, p 191-207
Oceanix City (2021) [Online]. Available: https://oceanixcity.com/. Accessed 01 Aug 2021
Okereke C, Wahab NHA, Mohamad MM, Zaleha SH (2021) Autonomous Underwater Vehicle in Internet of Underwater Things: A Survey. In Journal of Physics: Conference Series (Vol. 2129, No. 1, p. 012080). IOP Publishing. https://iopscience.iop.org/article/10.1088/1742-6596/2129/1/012080/meta
Pan G, Diamantoulakis PD, Ma Z, Ding Z, Karagiannidis GK (2019) Simultaneous lightwave information and power transfer: policies, techniques, and future directions. IEEE Access 7:28250–28257
Petrioli C, Petroccia R, Spaccini D, Vitaletti A, Arzilli T, Lamanna D, ..., Renzi, E. (2014, September) The SUNRISE GATE: Accessing the SUNRISE federation of facilities to test solutions for the Internet of Underwater Things. In 2014 Underwater Communications and Networking (UComms). IEEE p 1–4
Petrioli C, Petroccia R, Potter JR, Spaccini D (2015) The SUNSET framework for simulation, emulation and at-sea testing of underwater wireless sensor networks. Ad Hoc Netw 34:224–238
Qin C, Du J, Wang J, Ren Y (2020) A hierarchical information acquisition system for AUV assisted internet of underwater things. IEEE Access 8:176089–176100
Qiu T, Zhao Z, Zhang T, Chen C, Chen CP (2019) Underwater internet of things in smart ocean: system architecture and open issues. IEEE Trans Industr Inform 16(7):4297–4307
Rani S, Ahmed SH, Malhotra J, Talwar R (2017) Energy efficient chain based routing protocol for underwater wireless sensor networks. J Netw Comput Appl 92:42–50
Rembert LF (2020) Internet of Things Goes Underwater: Will It Survive or Drown? [Online]. Available: https://iotbusinessnews.com/2020/05/15/08981-internet-of-things-goes-underwater-will-it-survive-or-drown/. Accessed 15 July 2021
Robinson YH, Vimal S, Julie EG, Khari M, Expósito-Izquierdo C, Martínez J (2021) Hybrid optimization routing management for autonomous underwater vehicle in the internet of underwater things. Earth Sci Inf 14(1):441–456
Saeed N, Al-Naffouri TY, Alouini MS (2018) Outlier detection and optimal anchor placement for 3-D underwater optical wireless sensor network localization. IEEE Trans Commun 67(1):611–622
Saeed N, Celik A, Al-Naffouri TY, Alouini MS (2019a) Underwater optical wireless communications, networking, and localization: a survey. Ad Hoc Netw 94:101935
Saeed N, Alouini MS, Al-Naffouri TY (2019b) Accurate 3-D localization of selected smart objects in optical internet of underwater things. IEEE Internet Things J 7(2):937–947
Saeed N, Celik A, Al-Naffouri TY, Alouini MS (2019c) Localization of energy harvesting empowered underwater optical wireless sensor networks. IEEE Trans Wirel Commun 18(5):2652–2663
Senses Lab (2021) SENSELab Members. [Online]. Available: http://senseslab.di.uniroma1.it/team. Accessed 20 Aug 2021
Shen D, Tao L, Yu J, Ye P, Sheng Z, Zhou L, ..., Tong Y (2021, April) Disruptive Technology of Building Internet of Underwater Things: Laser-based Underwater Solid-State Lighting. In: 2021 5th IEEE Electron Devices Technology & Manufacturing Conference (EDTM). IEEE p 1–3
Shihada B, Amin O, Bainbridge C, Jardak S, Alkhazragi O, Ng TK, Ooi B, Berumen M, Alouini MS (2020) Aqua-fi: delivering internet underwater using wireless optical networks. IEEE Commun Mag 58(5):84–89
Sicari S, Rizzardi A, Grieco LA, Coen-Porisini A (2015) Security, privacy and trust in internet of things: the road ahead. Comput Netw 76:146–164
Singh KJ, Kapoor DS (2017) Create your own internet of things: a survey of IoT platforms. IEEE Consum Electron Mag 6(2):57–68
Song J, Xie H, Feng Y (2018) Correlation analysis method for ocean monitoring big data in a cloud environment. J Coast Res 82(10082):24–28
Srinivas S, Ranjitha P, Ramya R, Narendra GK (2012, September) Investigation of oceanic environment using large-scale UWSN and UANETs. In: 2012 8th international conference on wireless communications, networking and Mobile computing. IEEE p 1-5
Su R, Ju M, Gong Z, Li C, Venkatesan R (2021, June) A review of channel modeling techniques for internet of underwater things. In: 2021 international wireless communications and Mobile computing (IWCMC). IEEE p 1754-1759
Subblue (2019) Autonomous camera, subblue scooter, and remote-controlled drones,” [Online]. Available: https://store.sublue.com/. Accessed 5 Aug 2021
Submarines with IoT (2017) [Online]. Available: https://www.smart-industry.net/submarines-with-iot-internet-underwater-things/. Accessed 10 Aug 2021
Suzuki T, Kato K, Makihara E, Kobayashi T, Kono H, Sawai K, Kawabata K, Takemura F, Isomura N, Yamashiro H (2014) Development of underwater monitoring wireless sensor network to support coral reef observation. Int J Distrib Sens Netw 10(4):189643
Technology Enabler for Internet of Underwater Things Applications (2020) [Online]. Available: https://cordis.europa.eu/project/id/957008. Accessed 14 Aug 2021
The Sunrise FIRE Project: Building the Internet of Underwater Things. 2013. [Online]. Available: http://fp7-sunrise.eu/. Accessed 20 Aug 2021
Uddin MA, Stranieri A, Gondal I, Balasurbramanian V (2019) A lightweight blockchain based framework for underwater iot. Electronics 8(12):1552
Upal R (2018) Deep sea internet or internet of underwater things to connect the underwater world of sensors, unmanned underwater vehicles, ships and submarine. [Online]. Available: https://idstch.com/military/navy/deep-sea-internet-or-internet-of-underwater-things-iout-to-connect-the-underwater-world/. Accessed 20 June 2021
Vo DT, Nguyen XP, Nguyen TD, Hidayat R, Huynh TT, Nguyen DT (2021) A review on the internet of thing (IoT) technologies in controlling ocean environment. Energy Sources A: Recovery Util Environ Eff:1–19
Wang J, Ma L, Chen W (2017) Design of underwater acoustic sensor communication systems based on software-defined networks in big data. Int J Distrib Sens Netw 13(7):1550147717719672
Wang T, Zhao D, Cai S, Jia W, Liu A (2019) Bidirectional prediction-based underwater data collection protocol for end-edge-cloud orchestrated system. IEEE Trans Industr Inform 16(7):4791–4799
Wang C, Lu J, Ding X, Jiang C, Yang J, Shen J (2021) Design, modeling, control, and experiments for a fish-robot-based IoT platform to enable smart ocean. IEEE Internet Things J 8(11):9317–9329
Wu Q, Zhang R (2019) Towards smart and reconfigurable environment: intelligent reflecting surface aided wireless network. IEEE Commun Mag 58(1):106–112
Wu Q, Zhang S, Zheng B, You C, Zhang R (2021) Intelligent reflecting surface aided wireless communications: a tutorial. IEEE Trans Commun 69:3313–3351
Xu M, Liu L (2016) Sender-receiver role-based energy-aware scheduling for internet of underwater things. IEEE Trans Emerg Top Comput 7(2):324–336
Xu G, Shen W, Wang X (2014) Applications of wireless sensor networks in marine environment monitoring: a survey. Sensors 14(9):16932–16954
Xu G, Shi Y, Sun X, Shen W (2019) Internet of things in marine environment monitoring: a review. Sensors 19(7):1711
Yan J, Yang X, Luo X, Chen C (2018) Energy-efficient data collection over AUV-assisted underwater acoustic sensor network. IEEE Syst J 12(4):3519–3530
Yan J, Zhao H, Wang Y, Luo X, Guan X (2019a) Asynchronous localization for UASNs: an unscented transform-based method. IEEE Signal Process Lett 26(4):602–606
Yan J, Zhao H, Luo X, Wang Y, Chen C, Guan X (2019b) Asynchronous localization of underwater target using consensus-based unscented Kalman filtering. IEEE J Ocean Eng 45(4):1466–1481
Yan J, Gong Y, Chen C, Luo X, Guan X (2020a) AUV-aided localization for internet of underwater things: a reinforcement-learning-based method. IEEE Internet Things J 7(10):9728–9746
Yan J, Guo D, Luo X, Guan X (2020b) AUV-aided localization for underwater acoustic sensor networks with current field estimation. IEEE Trans Veh Technol 69(8):8855–8870
Yan J, Meng Y, Luo X, Guan X (2021) To Hide private position information in localization for internet of underwater things. IEEE Internet of Things Journal 8:14338–14354
Yang J, Wen J, Jiang B, Lv Z, Sangaiah AK (2018) Marine depth mapping algorithm based on the edge computing in internet of things. J Parallel Distrib Comput 114:95–103
Yazdinejad A, Parizi RM, Srivastava G, Dehghantanha A, Choo KKR (2019, December). Energy efficient decentralized authentication in internet of underwater things using blockchain. In 2019 IEEE Globecom workshops (GC Wkshps). IEEE p 1-6
Yisa AG, Dargahi T, Belguith S, Hammoudeh M (2021) Security challenges of internet of underwater things: a systematic literature review. Trans Emerg Telecommun Technol 32(3):e4203
Zeng Z, Fu S, Zhang H, Dong Y, Cheng J (2016) A survey of underwater optical wireless communications. IEEE Commun Surv Tutor 19(1):204–238
Zhang B, Wang H, Zheng L, Wu J, Zhuang Z (2017) Joint synchronization and localization for underwater sensor networks considering stratification effect. IEEE Access 5:26932–26943
Zhao Q, Peng Z, Hong X (2019, October) A named data networking architecture implementation to internet of underwater things. In proceedings of the international conference on Underwater Networks & Systems (pp. 1-8)
Zhou Z, Yao B, Xing R, Shu L, Bu S (2015) E-CARP: an energy efficient routing protocol for UWSNs in the internet of underwater things. IEEE Sensors J 16(11):4072–4082
Zhou J, Jiang H, Wu P, Chen Q (2019) Study of propagation channel characteristics for underwater acoustic communication environments. IEEE Access 7:79438–79445
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by: H. Babaie
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Mohsan, S.A.H., Mazinani, A., Othman, N.Q.H. et al. Towards the internet of underwater things: a comprehensive survey. Earth Sci Inform 15, 735–764 (2022). https://doi.org/10.1007/s12145-021-00762-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12145-021-00762-8