
Abstract
More than 75% of the Earth surface is covered by water in the form of oceans. The oceans are unexplored and very far-fetched to investigate due to distinct phenomenal activities in the underwater environment. Underwater wireless communication (UWC) plays a significant role in observation of marine life, water pollution, oil and gas rig exploration, surveillance of natural disasters, naval tactical operations for coastal securities and to observe the changes in the underwater environment. In this regard, the widespread adoption of UWC has become a vital field of study to envisage various military and commercial applications that have been growing interest to explore the underwater environment for numerous applications. Acoustic, Optical and RF wireless carriers have been chosen to be used for data transmission in an underwater environment. The internet of underwater things (IoUT) and next-generation (5G) networks have a great impact on UWC as they support the improvement of the data rate, connectivity, and energy efficiency. In addition to the potential emerging UWC techniques, assisted by 5G network and improve existing work is also focusing in this study. This survey presents a comprehensive overview of existing UWC techniques, with possible future directions and recommendations to enable the next generation wireless networking systems in the underwater environment. The current project schemes, applications and deployment of latest amended UWC techniques are also discussed. The main initiatives and contributions of current wireless communication schemes in underwater for improving quality of service and quality of energy of the system over long distances are also mentioned.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Global warming became a prior issue for several decades, due to the direct involvement of climatic changes [1]. Due to the continuous rise of global warming in the near future, the polar ice sheets will melt gradually and contribute to the rising of the sea water level. Hence, it is necessary to observe oceanic environmental activities, collection of oceanographic data, water sampling and water pollution. In recent decades, there has been a significant gain in the interest of studying, changes in the global climate, the exploration of the oceanic environment monitoring and investigation of the unguided water environment. The invetigation of underwater wireless communication (UWC) technique is an attraction to explore the oceanic environment, that refers to the method of data transmission in the unexplored water medium [2]. UWC is an innovative approach for underwater communication in modern ages which has been chosen for investigation and observation of data in the underwater environment [3]. In addition UWC is also used to relay critical information of earthquakes, seismic and tectonic plates movement data early detection warning of a tsunami from an underwater location. Wireless communication technologies already became a part of human daily life and are an important field of research in recent years to envisage. At present, Acoustic, Optical, and Electromagnetic (in RF ranges) waves wireless carriers are used to envisage UWC techniques in underwater applications.
Acoustic waves are the most popular method to achieve targeting signals in underwater over long distances with low latency and high spreading delay. Looking back in the history of acoustic communication, acoustic waves were introduced through an experimental work by Leonardo da Vinci in the 15th century. In 1750, the first partial differential equation of motion based on the sound wave was introduced. The speed of sound in a lake was experimented by J.D.Colladon [4] in 1826 using optical flash as a reference where the approximate velocity was measured as 1435 m/s. Rayleigh published the entire related work of sound an underwater medium in 1862. The hydrophones were introduced in the late 18th century to convert underwater sound energy into an electrical signal and vice versa [4]. In the late 19th century, acoustic waves were proposed with data rates of 8 kbps in underwater for 20 m depth approximately and 13 km over the water surface [5]. A high speed underwater acoustic communication (UAC) system was proposed in 2005 that recorded 125 kbp/s data rate using 32-quadrature amplitude modulation technique (QAM). Furthermore, a 60 kbps UAC system was demonstrated using 32 QAM that supported communication up to 3 km horizontally and 100 m of depth in underwater.
Electromagnetic (EM) communication was first used in the early days when radio waves were established [6]. In the late 19th century, Electromagnetic waves were used through morse code with voice text over long distances for military purposes. EM waves propagate differently in the underwater environment as compared to the terrestrial environment. The electromagnetic waves propagate in underwater with very high speed and frequency for short distances [7]. The high speed and limited parameters of EM waves depend on the physical constraints of water medium where systems need to deploy. EM waves in radio frequency (RF) ranges are capable of high data rate acquisition and transformation in shallow water over short distances.
Due to limited bandwidth and low data rates of acoustic and EM waves, an alternative approach is an optical communication that provides high-bandwidth data rate with low latency and minimum spreading delay in an aquatic medium. For instances, in 800 BC, the ancient Greeks and Romans used optical wireless communication through the polished shield in battles field to deliver messages [8]. In the 1880s, famous scientist Alexander Graham Bell invented the wireless telephone to send and receive sound up to 210 m based on optical waves. Heliographs based on optical signaling were used for military communication in the late 19th century [9]. During the 1960s, the laser was introduced for optical communication and signal transmission for very long distances [2]. Due to the large divergence of laser beams, the fiber optics were investigated in the 1970s [10].
The deployment of these wireless communication techniques, in an unexplored water medium are more challenging as compared to terrestrial wireless communication. However, the quality of data transmission and reliability may depend on the physio-chemical properties of the water environment and the physical characteristic of optical signals [11]. UWC requires more sophisticated communication devices for obtaining relatively high transmission data rates for over short distances. It has many distinct features that it makes correspondingly different from terrestrial wireless communication [12]. UWC system is difficult process to deploy, which is mainly influenced by channel characteristics such as the concentration of salt in water, pressure in the deep sea, temperature fluctuation, light extent, winds and their effects on waves propagation in the underwater environment [13].
1.1 Related Survey Articles
Underwater wireless communication networks are becoming profitable in the direction of research and technological development due to necessarily demand for ocean exploration in terms of minerals, oil, military tactical operations, environmental and water pollution monitoring [2]. Electromagnetic communication technology is not very efficient due to large attenuation and losses in the water channel. The authors [5, 14,15,16] discussed the implementation of UWC techniques and its applications. These survey articles provide a complementary platform to explore existing UWC techniques. A survey article [14] on UWC system, investigated Acoustic, Optical and Electromagnetic waves for underwater communication and related technical issues are discussed. Electromagnetic communication technology is not very efficient due to large attenuation and losses in the water channel. The authors [5, 14,15,16] discussed the implementation of UWC techniques and its applications. These survey articles provide a complementary platform to explore existing UWC techniques. A survey article [6] investigated communication technique based on EM waves in sea water. The authors [6] discussed the limitations and advantages of EM waves and applications in undersea for military purposes. A most recent survey work based on underwater optical wireless communication (UWOC) and related issues widely spread out in [2]. The authors [15] discussed UWOC techniques, their comparisons, in related work and a quick review of different laser sources for supporting of underwater communication. The authors in [17] investigated optical waves propagation in clearest ocean water type with different wavelengths. The affecting factors such as noise, absorption and scattering phenomena, a hybrid acoustic-optic system are also discussed in a comprehensive UWOC survey [15]. The distinct modulation techniques, methods, channel link and coding techniques of UWOC technology are proposed in [2]. In a recent survey work [5] of UWOC, where the authors proposed UWOC communication technologies and comparison with among of UWC techniques. The main focus was extensively suggested in the article where the underwater optical sensor network model on a distinct layer was presented in [5, 15].
Acoustic waves reveal lower attenuation and very low speed over long distances [18]. UWOC technique has high attenuation but is more reliable over short distance propagation in shallow water [14, 15]. Due to the increasing demand for UWC in many fields, It is compulsory to establish a UWC system which includes the sensor networks, hydrophones and base station for signaling data collection and signal analysis [2]. The UWC system includes communication devices and tools support to minimize the different noise, multi-path propagation, attenuation and the Doppler effect [5, 15]. Acoustic, Optical and EM underwater communication technologies a particular direction of research are widely discussed in [14].
The multiple access techniques suggested along with the major losses in acoustic and optical propagation in the water channel are given in [5]. A multi-hop algorithm in UWSNs proposed in [19]. Hereafter investigated three existing technologies along with the major problems of communication through UWSNs and deployment has been discussed. The frequency-based acoustic and RF gateway communicative description mentioned in [7]. In UWC, acoustic wave propagation disperses with water over a long distance [20]. Spreading of acoustic waves, in underwater by the support of water natural properties of the channel and its model has been discussed in [21].
1.2 Motivations and Contributions
Over the last few decades, wireless communication technologies are highly demand to deploy in a particular domain according to their requirements. Due to the limitation of terrestrial environmental weather conditions, underwater communication has been chosen as an alternative methodology to get to know the underwater environment over high band width and data rates with using distinct wireless techniques. The combined underwater communication emerging wireless techniques and their applications for the specific requirement will trigger up the future in a major evolution of UWC. We present the entire possible techniques of UWC towards the fifth generation according to users requirements. The comparison among techniques provide a better possible solution of communication in underwater is also discussed. The descriptions of technical issues and future direction of deployment to improve all over the performance of the system is also adhere. Due to increasing of UWC demand and research, many research articles introduce with practical work and experimental model in this particular area. UWOC, UWAC and UWRF propagation reviewed in most recent articles [14, 30]. The articles summarized the information and overview of high-speed acoustic communication through OFDM techniques [31]. The contributions of this paper are summarized as follows.
-
The paper provides a comprehensive survey of contribution and the latest research project schemes all around the globe. The survey of current research projects aim to encourage and development of underwater communication framework along with the future perspectives. The distinct methodologies to improve the quality and efficiency of the system and reliable underwater communication are possibly covered by surveyed projects.
-
Due to the wide range of applications of UWSNs, the most typical challenge is to supply power in an underwater medium. We are contributing the review of energy harvesting system to UWSNs architecture through WPT, SWIPT, Microbial Fuel-Cell process, and acoustic piezo-electric method. A hybrid acoustics-optical sensor network (AO-UWSNs) and galvanic type of energy harvesting system technique in an underwater environment is also suggested.
-
We anticipate the high data rate and bandwidth range in the future with the implementation of 5G wireless network candidate. The integral, FBMC and GFDM promising techniques towards 5G networks are also overviewed. Before the conclusion of this section, we include the future work and recommendations of 5G wireless network in underwater based on most recent literature on particular emerging technology.
-
We visualize most of the underwater communication emerging technologies and their applications for both academic and industrial perspectives that have a great impact on UWC system. Massive multi-Input-multi-Output (MIMO), Non-Orthogonal Multiple Access (NOMA), mm-Waves wireless carriers and Internet of underwater things (IoUTs) enable in underwater wireless communication play a significant role to the development and encourage the communication vitality. Moreover, we include the recommendation and future work of each particular section (Table 1).
Table 1 Existing survey articles and related contribution
1.3 Paper Structure
This paper consists of eleven sections: UWC as an overview and literature material is discussed in Sect. 2. The current project schemes, new paradigms, and their contributions are suggested by Sect. 3. The limited frequency range of electromagnetic communication and main issues during propagation in the underwater medium are widely discussed in Sect. 4. An exotic overview and future deployment of underwater optical communication with high data transmission is majorly depicted by Sect. 5. Most widely used communication method of acoustic waves in an aquatic medium and channel characteristics in nature are summarized in Sect. 6. Due to preferences and requirement of underwater communication technology, a comparison of underwater communication method is broadly discussed in Sect. 7. To improve QoS, the UWSNs architecture and necessities have a major role and explored in Sect. 8. To boost communication network and vitality, the integration of 5G wireless network support to the underwater communication represented by Sect. 9. The emerging technologies that support to underwater communication and use to improving data transmission have a place in Sect. 10. Finally, the entire work concludes and is summarize by Sect. 11 (Table 2).
2 Underwater Wireless Communication Overview
UWC is the most challenging and comprehensive technology for wired and wireless communications. UWC networks are necessarily important approaches to accessing data in an unguided water medium of the deep ocean. It has been an essential field for researchers and among academicians in recent years. The deployable technologies are advantageous to use in oceanographic data analysis, observing water pollution, environment monitoring, and early warning of natural disasters such as floods and tsunamis. They are also used to get to know the phenomena of rising water levels in the oceans. Thus, in UWC we use the three customized existing approaches available for underwater wireless signal transmission. The first technology is Electromagnetic waves (in form of Radio Frequencies) that enable a feature of high data rate over short ranges. Secondly, the Optical signal transmission (OPT) technique in underwater to achieve high bandwidth and data rate, which needs a line attenuating position during signal propagation over moderate distances. The third and most widely employable technology is Acoustic waves use for the longest range of communication. The drawback of acoustic waves is to achieve low throughput which affects by large delay spread. This means it leads to severe inter-symbol interference (ISI). In above-mentioned technologies, the most important point is to consider the cost of implementation. The cost of implementation is associated with required data throughput for a prescribed communication range and the relative transmission power that might lead to environmental impacts such as interference with marine life. In order of increasing depth in the oceans, density and pressure tend to rise. The upper layer of water is always denser than the corresponding layer in depth. The physical properties of optical waves experience reflection, refraction, and dispersion due to a physio-chemical characteristic of the channel.
RF mostly used for terrestrial communication, for a quick response and minimum delay spread. The electromagnetic waves have high-frequency propagation, high bandwidth, quick response, and efficient communication among network nodes which are discussed in [32]. The propagation speed of EM waves are similar to the speed of light and differently propagate in water than air because of the affection of water permittivity and electrical conductivity [33].
A substitutional approach is UWOC, which allows high latency and data rate over moderate distances as compared to RF and acoustic waves [34]. Optical waves diffract, absorb and scattered by the suspended particles in the water channel. Signal absorption, scattering, and reflection are caused by the turbidity, pressure, temperature and existing suspended material in the water environment [1]. In optical signal propagation scattering occurs due to suspended particles and absorption occurs by the physical properties of the water channel. Due to absorption of optical signals, the wave energy transforms into heat energy which causes the rise of chemical vitality of the water channel. Turbid harbor water causes more scattering, due to collision phenomena of the optical beam with suspended particles and multiple reflections of angles [32]. In UWOC, each color has a different frequency range and does not affect the same way [14]. Each color has a different frequency spectrum range over short distances. The different frequency spectrum ranges have been shown by Fig. 2. The blue to green colors offer a great performance of about 10–150 Mbps over 10–100 m [32]. The optical waves do not propagate with the same speed in water as in vacuum but accelerate in water medium exponentially due to attenuation.
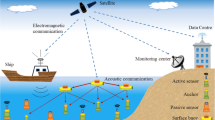
One other profitable wireless carrier technique is acoustic waves, which is used most widely in underwater wireless communication for long distances with low bandwidth. Acoustic waves are produced through the vibration of molecules in an elastic medium. Acoustic waves propagate longitudinally with channel particles through adiabatic compression and expansion. However, propagation towards the direction of induced vibrations in water medium those travel horizontally. In underwater, acoustic waves propagate faster than in air with fewer energy losses. The acoustic waves propagate generally at 1400–1600 m/s in the ocean but travel at the speed of 340 m/s in the air [32]. Several factors also affecting the acoustic propagation include scattering, reflection, and absorption of sound waves in the aquatic medium. Acoustic waves propagation totally depend on the physical channel properties such as pressure, temperature, and salinity, but during propagation, a huge power loss occurs due to absorption and scattering phenomena which could be an effect on the speed of the signal. The advancement of communication in underwater is the necessity of the establishment and architectural design of USWNs for obtaining proper communication among devices. The fixed and anchored nodes play an ample role in communication for detection and collection data from the unseen segment of river, lakes, and sea. The cluster of UWSNs are represented by Figs. 1 and 3 (Table 3).

Scenario of existing hybrid dual-hop RF-Acoustic underwater wireless communication link
2.1 Availability of Different Waters for UWC
There are different types of waters classified according to concentrating amount of salt and water densities. The saltwater mostly found in oceans which is quite different from freshwater reservoirs such as rivers, lakes, and dams. Marine vegetation, mammals and species are adapted to live in saltwater but several plants could thrive in both types of water mediums. Generally, ocean water also classified into two horizontal layer categories where the sound waves consider highly affected by temperature and pressure between the upper and lower region. The upper layer has a high temperature, due to direct sunlight than the transitional layer. The transitional layer called thermocline where the big fall in temperature rises in increasing depth. Due to falling of temperature, the speed of sound waves [1].
According to Jerlov [13] the water for communication can be classified into three main categories according to their geographical condition i.e, clearest water, intermediate and murkiest water. Most probably, clearest water could be found in the Atlantic and Mid-Pacific ocean while the intermediate water which exists in the Northern Pacific ocean. The murkiest water can be found typically in the North Sea and Eastern Atlantic ocean. According to the literature [35, 36] and due to optical inherent properties, seawater has been divided into four types [14]. These are pure seawater, clear ocean water, coastal ocean water, turbid harbor and estuary water which are mentioned in Table 5. During signal propagation absorption and scattering losses occur by different waters. Due to absorption, the major losses occur in pure seawater whereas scattering loss due to the higher concentration of particles in clear ocean water. The high concentration of particles that affect scattering and absorption in the coastal ocean the highest concentration of particles fond in turbid harbor and estuary water.
-
Clear ocean water: Clear ocean water has the quality of concentration and to dissolve organic matters, salts, and mineral components. Clear ocean water has been discussed due to its properties and geographical constraints [15, 37].
-
Pure seawater: Optical signals less effective in pure seawater as compare with turbid and coastal waters. Due to increasing optical signal wavelength, the absorption of optical signals is the sum of absorption in pure water and by salt considerably. The wavelength range of optical signal has shown in the frequency spectrum which is nearly 400–700 nm by Fig. 2. In pure seawater, the absorption coefficient is described in Table 5 [15, 17].
$$\begin{aligned} \alpha _{seawater}(\lambda )<K(\lambda )-b(\lambda )/2, \end{aligned}$$(1)where K denotes the coefficient of diffusion, \(\lambda\) is wavelength and b represents to scattering coefficient.
Fig. 2 
Description of electromagnetic spectrum frequency band [54]
-
Coastal ocean water: The coastal ocean water is much robust in comparison to clear ocean water. Coastal ocean water shows high rate dissolve properties of suspended particles in it, which cause scattering, absorption cause of turbidity [5, 38]. Scattering and absorption coefficient are higher in this type of water that offers less propagation ability through it [15].
-
Turbid harbor water: Turbid harbor water has inimical and high concentration rate of suspended particles. A high rate of absorption and scattering occur in it as compared to coastal ocean water [5] (Table 4).

2.2 Summary
The UWC techniques are such methodologies that extract acquiring the signal from an underwater environment. A comprehensive research and scope of the above technologies are mentioned in [14, 15]. In UWAC communication the signal range is higher in order of over tens of km as compared with optical and RF communication techniques [11, 14,15,16]. Acoustic waves have poor performance in the propagation of very long distance where the transmission can be affected by water turbidity, noise, and other physiochemical properties, especially in the deep ocean. The optical waves have an excellent propagation performance in clear and clean ocean water but required line of sight (LOS) between transmitter and receiver [2]. The propagation of hybrid optical signal with underwater optical communication has been explained by Fig. 3. The communication in such critical environmental conditions might be possible through signal propagation links from the terrestrial base station to satellite, and then send signals to the floating device or submarine. There are possibilities to exchange the signal data through RF antennas located at floating devices or the base station. The possibility of receive signal through the antenna on floating buoy also use for exchanging information with the terrestrial base station. In an underwater environment, it is also possible to deploy different types of signal exchanging devices or communication nodes consisting of the autonomous underwater vehicle (AUVs) and remotely operated vehicle (ROVs).

Demonstration of hybrid RF-Optical Underwater wireless communication systems
3 Current Projects on Underwater Wireless Communications
UWC plays a significant role that serves most relatively applications, such as in the detection of mineral, oil and gas sources, coastal security, seismic detection, environmental impact on ecological system, navigation and water pollution control [16]. The data transmission possibilities are communication-based between two corresponding nodes in the underwater environment through distinct sensor nodes. In UWC a sensor network deploys for signal transmission. The deployment of configurations in underwater system consists of fixed and anchored sensor nodes such as floating unmanned under-water vehicle nodes (UUVs) or AUVs, signal receiver processing towers, floating buoys, submarines, ship, and onshore base station [14]. The current underwater communication project schemes are providing future research and innovative track for underwater communication wirelessly. Most recent work and contribution of current projects are summarized in this article as follows.
-
Most of the underwater communication implies with the acoustic system, considering radio frequencies for underwater vehicles cannot comply with the imposed requisites. The limited range of communication, signal attenuation is the main factors that influence the transformation of information in the marine environment. Hence, the requirement of the UnderWorld project scheme is to re-evaluated by electromagnetic communication throughout UWSNs. UnderWorld project scheme is co-funded by “Spanish Ministry of Economics and European Regional Development fund” [41] in the scope of research, development and innovation program focused on the society challenges in the research framework. The aim of UnderWorld project scheme is to raise the interest of industries, military functions, environmental operations, and seaport management, infrastructures are main focal points which are highly demanding and reliable high rates for encourages to imply the underwater electromagnetic communication instead of acoustic waves propagation cause of inferior performances. Though, it provides ornamental monitoring key application for shallow water in remote sites. The new paradigm in most significant advances in different fields are considering through this proposed project scheme, such as new effective communication antennas and DSP (Digital signal Processing) units. Its main contributions are respectively, antenna design, propagation model and further envisioning of UUVs as communication devices to support system quality and performances.
-
The CORDIS European Commission [42] launched a new project scheme named Underwater Acoustic Network (UAN) that aim to conceive, developing ocean and operational concept of submerged, fixed and floating sensors network. The concept of UAN is mutually environmental information during propagation and predict the optimal obtainable performance of the system invariant time. The aim of this project is to extract obtainable information for communication which has been categorized into two different categories by introducing physical and geometrical constraints and by adapting node geometrical configuration to the acoustic propagation conditions predicted from the environmental observations. The UAN project contributes to a multidisciplinary consortium of technologically advanced industries knowledge experience in this particular sphere.
-
The Smart and Networking Underwater Robots in Cooperation Meshes (SWARMs) project scheme launched and co-funded by “European commission and the Universidad Politecnica Madrid” [43] deals with substantial issues of underwater robots. The scheme encourages the number of IoUTs in undersea for proper and easy to connect devices on real-time data streaming. The main aim of this latest project scheme is to evince the number of scenarios in which the SWARMs of underwater robots carry out the solution together.
-
The latest project on underwater communication through “Broadband Wireless Networking Lab (BWNL)” conducted by “Georgia Institute of Technology” [44] aiming communication range of underwater through sensor nodes in civil and military applications that can retrieve information in the marine environment. The main research objectives of the underwater project are to exploring the applicability of the THz band for underwater communication through Ultra-Massive MIMO and Dynamic Massive MIMO respectively. Another essential research objective is to design of piezoelectric underwater energy harvesting system. The future of mankind is depending on careful monitoring control and exploitation of the marine environment through IoUTs. The combination of IoT can provide the missing effective, pervasive means to sense and monitoring oceans through UWSNs and underwater novel robotics technologies that are further discussing by SUNRISE building of IoUTs [45] and ARCHEOSUb underwater communication projects schemes [46]. The SUNRISE and ARCHEOSUb project scheme are governed and partially funded by “University of Rome La Sapienza Italy”.
-
The most recent collaborative, distributed, efficient, ubiquitous and secure data delivery system project (DEUS) leading by “The University of Houston” [47] using AUVs which is an emerging field of research studies that support and contributes most of the surveillance and water monitoring activities in the underwater environment. The project objectives of DEUS are to providing viable cyber interconnection scheme that enables distributed, efficient, ubiquitous and secure data delivery from UWSN to surface station. The suggested viable cyber interconnection scheme features cheap underwater sensor nodes with energy harvesting capability, a fleet of autonomous underwater vehicles (AUVs) for information ferrying, advanced magneticinduction (MI) antenna design using ferrite material, distributed algorithms for efficient data collection via AUVs, and secure data delivery protocols.
-
A new stress wave-based communication method using a piezoelectric transducer suggested for sub-sea communication investigated by Stress Wave Assisted Communications Sub-sea Environment (SACSE) project scheme proposed [48]. In this new method, the gathered data from well-designed sensor nodes in underwater encodes into modulated stress waves and further utilize man-made sub-sea structures such as pipelines as robust conduits for data transmission. SACSE methodology has a great potential of implementation for succeeding in deep waterwhere most of the conventional communication methods would face excessive difficulty. Due to the limitation and parameters of each of underwater communication technology, SHOAL the European Research Project [49] program will develop an Underwater Mobile Ad-hoc Network (UMANet) in harsh environmental conditions. An additional feature of the project scheme is the key impact of communication on marine life especially for mammals and underwater species (Table 5).
4 Underwater Electromagnetic Communications and Related Issues
Electromagnetic communication is a synonymous wireless connection with a high-frequency capacity of data rates and high propagation velocity in an underwater environment (Table 6). EM waves are especially used and deployed for a smooth transition between underwater and terrestrial-based communication platform [7]. The defined frequency ranges generally from a few kHz to 1 GHz especially for military applications [6, 14]. The range would be increased up to 300 GHz if we fully consider to EM waves as in RF ranges Tables 7 and 8 describe the different nomenclatures of frequency bands and ranges in different water mediums [50].
Electromagnetic waves in RF ranges depend on water constraints such as water conductivity, permittivity and water permeability of the channel. The characteristic constraints are shown by (3). Electromagnetic waves easily attenuate by seawater on increasing of the frequency range. RF waves attenuate in ocean water approximately 169 dB/m for 2.4 GHz bandwidth while this range changes up to 189 dB/m in freshwater. Thus, to receive high bandwidth data rate, the requirement of a large size antenna in underwater wireless RF (UWRF) communication [2]. The different types of antennas are classified and mentioned in a most recent survey based on 5G wireless networks [4]. In hybrid underwater electromagnetic communication, radio waves can propagate for a long distance in conductive seawater on increasing extra low-frequency range (30Hz–300Hz) which require high transmission and a large antenna [20]. The Electromagnetic waves are used for communication within a limited range in between underwater and terrestrial-based locations. The RF waves propagation speed is depending on frequency (f) and wavelength (\(\lambda\)). It is more comprehensible to describe a wave or sinusoidal through wavelength or frequency. Both of the wave properties are inversely proportional to each other and related through the speed of light. The relationship of frequency and wavelength in a vacuum is shown in the following (2)
where c is the speed of light (m / s) and product of both the properties, while frequency f (kHz) is inversely proportional to the wavelength \(\lambda (m)\) .
EM waves frequency range from MHz to GHz perform work efficiently between underwater communication link with a terrestrial transceiver which is known as hybrid communication. EM waves propagation setup deploy for shallow water over to the tens of meter which is called by RF buoyant communication [15]. RF waves propagate in water for several distances, and can cross the air-water layer (surface boundary layer) to reach at the floor in shallow water [6]. In terms of physical phenomena, the possibilities of signaling among devices such as mobile, TV and satellite are high, but the ocean water offers high conductance which could be affected seriously by the propagation of electromagnetic waves. Thus, there are fewer possibilities available to establish RF communication for long-distance in the underwater environment with ultra-high frequency, very high frequency ranges (VHF and UHF) or even in high frequencies as given in Table 7. Even, the electromagnetic-waves attenuation in terrestrial communication could be considered as low enough to allow for expected communications over several kilometers, unfortunately the ranges of these frequencies from 3 Hz to 3 kHz and from 3 to 30 kHz are not wide enough to enable transmissions at high data rates used in naval and environmental application for communication [51, 52]. Thus the use of these frequencies has multiple paths for an increase of signal propagation distance in shallow water and the signal transition from submerged nodes to onshore station [53]. In this process, the signals travel to the seabed with high attenuation than air. In RF signal propagation the Doppler effect also suffers.
The process of RF signal propagation depends on weather and channel environmental conditions, also its biophysical properties in terms of conductivity, salinity, temperature, and frequency [21]. In seawater, the average value of conductivity is approximately 4 mhos/m which is doubled in the magnitude of conductivity in fresh water [15]. The (3) has a description of water permeability in fresh and clean seawater.
where the RF frequency denoted by f in Hz and \(\sigma\) represent the conductivity of water. The vacuum permeability is denoted by \(\mu _0\) \(\equiv\) 4\(\pi\) \(\times10^{-7}\) H/m. The value of \(\mu_{0}\) is almost same in fresh and sea water [14]. The distinct value of conductivity shows the relevance of salinity in the propagation of the RF signal. The main facet which could be considered for the underwater wireless channel in RF transmission is water salinity. A wireless channel model for RF transmission in the saline water described by a typical channel model transfer function [14, 21].
where \(H_0\) describes the DC channel gain and \(\theta\) (f) denoted the phase of the channel, the distance between transmitter and receiver is denoted by d. Due to a specified fixed frequency, the response of channel magnitude exponentially decreases with the increase of distance. Lower frequency ranges, the attenuation of ocean water is always higher than that of freshwater. For all lower frequencies and distances lead to less attenuation which can be calculated by (4). For the plane wave model spreading losses could not be considered. But if we consider the spherical wave model, the attenuation losses are more noticeable and spreading losses due to the high conductivity of the channel. At first, the attenuation increases exponentially with respect to signal propagation. Secondly, there is a proportional increment with respect to propagation distance. In UWRF communication, the short propagation distances can be useful in some specific applications, such as the data transfer process among devices in shallow water, without any wired source.
4.1 RF transducer
Transducer are those appliance that are capable to convert analog data into electrical signals or vice-verse in open air-wireless communication through an antenna [14]. In EM wave propagation, if frequency range changes ELF to VLF, there is a requirement for large size receiving antenna for properly embedded operation for underwater wireless communication.
4.2 Literature Review of EM Waves Underwater Communication
In early ages, EM communication was used on terrestrial base over a long distances and the investigation was the crucial stepping stone for research. The EM frequency range (30 Hz to 300 Hz extremely low frequency) enabled for the submarine to transmit of few characters per minute in underwater environment [6, 55]. Ahmed at el [7] experimentally discussed the similar work of EM waves propagation in seawater. Shaneyfelt at el experimented the workflow of EM communication between the water surface and underwater through robotics swarms [56]. EM waves have distinct propagating phenomena in underwater with the comparison of acoustic and optical waves. EM communication in shallow water can be easily affected by attenuation and a possible solution to use and deployed unmanned vehicles (UUVs) or remotely operating vehicle (ROVs) [57]. The UWSNs play an essential role and tightly structured design for efficient communication which has been surveyed on medium access control (MAC) basis [58].
4.3 Affecting factors of Electromagnetic Communication in Underwater environment
EM communication possibly affects by several factors depending on water channel properties or by the marine environment such as fixed limited bandwidth, power resources, harsh water channel conditions, turbidity and by various types of noises, in underwater ambient conditions.
-
Multi-path propagation: The most influential phenomena of EM waves propagation from air to water has been taken into an account that affects the signal propagation performances. The refraction angle and losses also considered in RF signaling.
The obtuse refractive angle allows high permittivity to launch signals which would be approximately parallel with the water surface Fig. 6. As a result, communication possible through the requirement of AUVs or UUVs node to floating buoy in deep water. The same development of patching devices in the deep sea among sensor network [53]. Electromagnetic waves propagate in a single path with the least resistance and prevail to use for long-range in deep seawater. The multi-path propagation of EM waves could be an advantage for signal transmission in shallow water [53].
-
Antenna: The large antennas size required for RF propagation terrestrial to underwater communication. The magnetic types of antennas are the most compact practical solution that has been discussed in [53]. For being consideration, an electrical dipole antenna type for lateral electromagnetic waves mentioned in the relevant article.
4.4 Future Directions
RF communication offers a great prospective aspects for UWC that permit to explore the forbidden field of ocean and underwater environment. Electromagnetic signaling enables to lower distance signal propagation that was unaffected by harsh conditions and noises in shallow water. The intention of deployment RF communication for acquiring high bandwidth data rates along with the possibilities to eliminates the challenges in shallow and congested water. Extremely low frequencies (ELF) cover long distances while the high frequency (HF) has high attenuation cause of losses. The utilization of ultra-high frequency (ULF) to medium frequency (ME) ranges as future aspect and widely discussed in [53]. Electromagnetic waves used for a limited range of underwater communication that could be improved and implement to long range in deep ocean through specific design of antennas. EM communication technological scheme in underwater would be considered of antenna design, transmitting power, bandwidth, and noise as major factors to resolve.
4.5 Summary
Underwater RF communication has limited applications especially for military uses. On exploration of electromagnetic waves which coupled with digital technology and signal compression technique. It has many assets that form an appropriate niche for underwater utilization. UWSNs are deployed for convenient communication monitoring for coastal erosion and undersea activities through electromagnetic waves. RF-based communication used on physical layer because they offer distinct utilities as compared to optical and acoustic types communication.
5 Underwater Optical Communications and Related Issues
UWOC is an alternative approachable technology which refers to transmitting data in a water medium. This means the wireless carrier that can propagate with extremely high frequency (EHF) along with very high data rate and bandwidth over tens of meters in an underwater environment. UWOC has many distinct properties during propagation at different frequencies over different ranges with dissimilar water medium [5]. The seawater offers a conductor property for EM propagation and required large antenna size and energyconsuming transceivers also suffer high attenuation in seawater while the seawater offers dielectric properties for optical signal transmission [8, 14]. The seawater changes its property conductor to dielectric at the frequency range around 250 GHz. Thus, Optical communication is leading technology to build a communication link in underwater but it might be affected by scattering, dispersion, lack of line of sight (LOS), changing in temperature, and by physiochemical properties of the channel.
The number of growth of human activities through UWSNs, ROVs, and AUVs to explore the underwater environment. Hence, the necessity of reliable and relatively mature visible light communication (VLC) required [59]. Underwater visible light communications (UVLC) especially useful for the military and industrial purposes [60]. Therefore, VLC possibly considers as a high speed communication network candidate in future. The widespread benefit of VLC to provide a necessary communication in terms of lighthouse and beacons [61]. Swimmers and divers in deep underwater use to hand signals and writing-boards to communicate where the light as a signal should to use. The VLC use for signaling and data transfer through the light emitting diode (LEDs). The lightemitting diode (LED) based luminaries can be modulated at high speed and consider to obtain high data rates in underwater. Laser diodes are the best unique option to achieve more than 10 Gb/s data rate over long distances [62]. Underwater optical signal propagation is used for moderate distances due to sever absorption and backscattering by discontinuous particles. The optical propagation has low attenuation of bluegreen wavelength (450–550 nm) on EM spectrum, this means the lower attenuation of blue-green window sources has to improve the detectors Fig. 2. The blue-green color optical signal window has lower propagation attenuation and this shows to improving blue-green sources [39, 63].
The implementation performance of VLC in underwater acquire high data rate than underwater acoustic communication. UWOC technique allows high data rates as compared to RF communication through a dielectric medium where the range of propagation limited to tens of meters [64]. The light speed might be around four to five times higher in magnitude than propagation speed of acoustic waves in aquatic medium [14]. The comparison among these technologies are mentioned in Table 10, according to the specific requirement of signal propagation. The negotiation of the Doppler effect is profitable in optical wireless communications. The signal propagation distance totally depends on the frequency range. The requirement of LOS in optical communication between transmitter and receiver which maintain the direction of tracking of communication link [65].
5.1 Existing Work of Underwater Optical Communication
In the very early ages of optical signaling, used of smoke, beacon fires, torches and sunlight were introduced. The signaling through heliographs used as an instrument, those were the combination of a pair of two mirrors which is used directly to control to the beam of light during day while kerosene fire used to transmit signal at night. In the late 19th century, Graham Bell invented photo-phone which was used to transmit voice signals through optical signal over 200 m approximately. In the 1960s a survey work on lasers as communication was published where He-Ne laser at 632.8 nm of wavelength introduced over 30-40 km [10]. The freespace optical communication (FSO) technology introduced late in the 19th century where the fiber optical links were not feasible. FSO technique used to transmit high data rate over several kilometers between two corresponding points. A wide discussion of FSO has been summarized in most recent survey article [2, 3]. The significant researches have been introduced and improved for FSO system performance since the last decade and current prediction expects the commercially use of FSO which will rise up to twice by 2018. FSO links are used to very high data transmission rate while terrestrial optical wireless communication (OWC) are available to use up to 10 Gbps data rates [3].
5.2 Optical Signal Propagation in Underwater Communication
To deploy UWOC technology in underwater is tough and challenging as per the requirement of water condition (shallow to deep water). The channel properties vary with different geographical conditions and constraints of dissolve interrupted matters in the propagative medium. According to the environmental conditions, the seawater has been categorized into two specific featured categories which affect the optical propagation in the water channel. These featured categories are respectively the inherent optical properties (IOP) and apparent optical properties (AOP). IOP is the medium dependent only while AOP is light source dependent [66]. IOP are more reliable and relevant for underwater wireless communication. In IOP spectral absorptive coefficient and volume scattering function are the two main factors to be considered, the cause of absorption and scattering phenomena [35]. The absorption phenomena that conversion of optical signals into heat energy that absorbed by suspended particles. The absorption occurs at chlorophyll in phytoplankton at colored dissolved organic matter (CDOM), in water molecules at dissolved salts in water [66]. The photons change their direction due to scattering. The possibility of scattering may be originated by salt- ions in pure water or by particulate matter [66]. The absorption a(\(\lambda\)) and scattering b(\(\lambda\)) parameters are mentioned in Table 5c(\(\lambda\)) and \(b_b\)(\(\lambda\)) parameters showing in Table 5 [67]. Due to the energy loss in absorption and scattering defined as an attenuation of the optical signal which has been described as [68, 69].
where \(I_0\) and I are the light intensities at the transmitter and receiver ends, the distance apart of transmitter and receiver denoted by d. The whole procedure defined in [35, 68]. Through (5), the spectral absorption coefficient a(\(\lambda\)) and scattering coefficient b(\(\lambda\)) are denoted and mentioned numerically by Table 5.
5.3 Technical Issues in Underwater Optical Communication
In UWC many sources are responsible for noise as they affect to optical signal propagation. The different types of noises occur in underwater communication. The quantum noise occurs due to random variation of received photons on the optical receiver. The optical excess noise is caused due to the imperfection of the transmitter. The optical background noise and photo-detector dark current noise occur due to the optical environment and electrical current leakage from photodetector. Scattering and absorption phenomena also affect optical signal propagation in UWC.
-
Scattering and absorption of optical waves in UWC
Absorption and scattering are the two crucial effects that affect the propagation of optical waves in underwater. We can understand the simple phenomena of these two factors by the geometrical model of a water element that has been shown in Fig. 4. If the input beam of light has a strength of \(P_i\) with \(\lambda\) wavelength. The small fraction of incident beam absorbed (\(P_a\)) by the water element and scattered beam denoted by \(P_s\). The unaffected result \(P_c\) passing through the water element whose volume is \(\delta\)V and thickness \(\delta\)r respectively. According to the energy conservation law, it can be described as

The absorbance and scatterance factors A and B define as the ratio of absorbed power to the incident power and scattered power to the incident power respectively and described by (7) and (8) [2, 15].
where \(P_a\), \(P_i\) are the absorbed and incident powers while \(P_s\), \(P_c\) are the scattering power and resultant power respectively. The coefficient of absorption and scattering are too small also \(\delta\)r becomes infinitesimally small as describe in [2, 15].
The overall attenuation of coefficient c(\(\lambda\)) is represented by (11). The numerical values of c\(\lambda\) in different waters mentioned in Table (5).
5.4 Optical Transducer
The optical transducers are generally designed for transformation of the optical signal into electrical signals and fixed on a well-defined coordinates in underwater as a sensor at the receiver end. Optical transducer transforms signals through an actuator at the transmitter end [13]. Optical transducers are also constructed to generate optical signals from electrical bodes that composed of optical source in the form of a beam. Optical transducers perceive optical signals and transform into an electrical signal, which composes to optics collection detector.
5.5 Optical Transmitter
The optical transmitter may be a laser type or a lightemitting diode. The laser technological sources are different types of lasers which use according to the requirement. The use of the argon-ion lasers are more suitable which converts the electrical signals to optical signals [13]. The other technology could be used in UWC called as laser modulators, where the data rate is low and propagation range is longer [14]. As compared to laser, the optical sources are cheaper but used for short range [67]. In laser optical sources an array of LEDs which could be designed in the hexagonal type of pyramid shape [67] where one lens apply on each LED. Every single LED has an output signal direction and composing the switched beam steering mechanism on the transmitter.
5.6 Optical Receiver
Receivers are the combines and compose of all detectors for collection of optics [14]. The collection of optics focused on one lens to detect. The detector is inbuilt with the photosensor where the optical signals convert into an electrical signal for analysis. The main function of the transducer to receive all collected maximum quantity of photons. For improving the performance of the system, a photo-sensor should be low cost, small in size, robust and power efficient [70]. Currently, the different type of photo-sensors are called as photoresistors, photo-thyristors, photo-transistors, photo-multiplier tube, avalanche photo-diode (APD), p-n photo-diodes, a photon detector, semiconductor, photo-sensors and biologicallyinspired quantum photo-sensors (BQP) [14, 70]
5.7 Future Directions
The utilization of OWC technique in underwater with high frequencies open doors of new opportunities in the future. It allows transmitting data at high speed. In broadening approach of UWOC the system performance and efficiency could improve. The UWSNs are highly recommended for high energy and bandwidth signal transmission through optical signal between sensor nodes and base station through AUVs and ROVs. Thus, the large scale promising research required for developing more advanced and low-cost light-emitting receiving sources. FSO system also applicable, some applications are available for the terrestrial link with high data transmission rate approximately 10 Gbps. Due to low-cost, low capacity of power consumption and highly compatible optical network find applications in a heterogeneous network system. An acoustic-optic hybrid communication system is capable to provide high data transmission through assisted robotic sensor networks.
5.8 Summary
UWOC support high data rates over moderate distance with low latency. However aquatic medium poses many challenges for UWOC which entail high-frequency data transmission and receiving through submerged UUVs devices. UWOC suffers distinct losses and diffraction in the underwater channel. The most countable losses are scattering and absorption due to suspended particles in underwater. The temperature and pressure are physiochemical properties of water that resists optical propagation in underwater. The different techniques to improve propagation and performance has been discussed entirely and corresponding references [5, 9, 15].
6 Underwater Acoustic Communications and Related Issues
Underwater wireless acoustic communication (UWAC) is an ambitious and challenging technology to deploy in underwater. It is an alternative communication media to use UWC for approaching the high range of distance while the RF and optical communication technologies have a limited range of propagation those affected by strong attenuation and water turbidity [2]. Acoustic waves propagate with low frequency, bandwidth and low speed around 1500 m/s. Acoustic waves propagate very fast in normal warm water than in cold water. Generally, the speed of acoustic waves increases approximately 4 m/s on rising 1 °C of temperature in water. Although an effective phenomenon of increasing the speed of acoustic waves on rising salinity of 1 practical salinity unit (PSU), an extremely increment in the speed of acoustic wave approximately 1.4 m/s. Approaching high depth in water, the acoustic waves speed also increases around 17 m/s per kilometer where the pressure and temperature also increase. In Fig. 5 the assessed collected data for roughly estimation and quality of wave propagation mentioned [11, 32].

Acoustic waves speed profile due to pressure and temperature in different depth [11]
6.1 Existing Work of Underwater Acoustic Communications
UWAC is a specific area of research that has witnessed major advantages over the past few decades. Rapid evolution and expansion of UWAC make conceivable use and implementation of signal processing and experimental demonstration of their performance in the water channel.
Acoustic waves are not enough to achieve high bandwidth signals in underwater but use for long-distance communication. Acoustic waves categorized on signal propagation distance basis as very short, short, medium, long and very long distances mentioned in Table 9 [15]. An acoustic propagation model and statically characterization have been discussed [71]. The speed of propagation is depending on the mechanical and electromagnetic properties of the channel. However, Electromagnetic waves can propagate through the air as the almost speed of light in vacuum. The related details mentioned in Table 4. The EM waves propagate five times higher in magnitude larger than the propagation speed of acoustic waves in water. EM waves are the most suitable communication technology for communication for few meters in shallow water. An acoustic model has been discussed based on sound speed profile (SSP) in underwater communication environments with depth up to 1000 m [71].
where T denotes channel temperature, S represents the salinity of water and the depth of water denotes by z. Another model for SSP for all depth of water mentioned in [12]. As a result, the acoustic waves speed is a function of channel temperature, depth, and salinity of water [37]. Due to rise in temperature, salinity and depth the acoustic wave speed will also increase.
Due to the depth consideration, the underwater environment is classified into two main categories as shallow and deep water [72]. The two classes are hypsometric and acoustic respectively. In the hypsometric category the shallow water is located on the continental shelf, and the depth of water lower than 200 m but in the sea the depth of water column more than 2000 m. In acoustic signal transmission, the waves experienced as a reflection from the sea bottom to water surface before their detection by the receiver, while in deep water it is not necessarily a reflection of a wave from the sea bottom. The main concern in acoustic wave propagation is signal power loss. There are different types of power losses in acoustic wave propagation such as spreading loss, scattering loss and absorption loss respectively [5, 14]. Spreading loss is considered and modeled as cylindrical for long distance where the propagation bounds by sea surface and floor, due to distance increment the wave surface model may be considered as spherical or cylindrical. The loss of energy happens due to spreading the signal over a large water surface area. Spreading considered as cylindrical for shallow water and spherical for deep seawater.
The loss of energy during transmission of the acoustic wave is converted into another form of energy and absorbed by the medium. The higher possibility of conversion waves into heat energy is due to high frequencies with large absorption losses. Similarly, longer propagation ranges lead to higher absorption losses [73]. Acoustic waves propagation range based algorithms are time, signal strength and angle dependent [5]. Most of the algorithms are time-based (ToA) and time difference of arrival techniques (TDoA) based suggested in [74].
Absorption loss is the signal frequency dependent which can be expressed as [11].
where \(\alpha\)(f) is absorption coefficient, which the sum of absorptivity by seawater and the chemical relaxation in [30, 75]. The first two terms in 13 are a contribution by boric acid and magnesium sulphate [11, 30] and last term is the contribution of pure water. Where \(P_1\), \(P_2\) and \(P_3\) are the pressure intensities while \(A_1\), \(A_2\), \(A_3\) are the constants respectively.
Scattering loss occurs due to obstacles during acoustic wave propagation. These obstacles may be caused by sea surface or sea floor and existing objects in the water either fixed or flexible. Both spreading and absorption losses phenomena contribute path loss, which explained as a simplified model expressed in dB as [73, 76].
where l is the distance (in m) of propagation range between transmitter and receiver, f frequency (kHz), k denotes the spreading factor. The value of k = 1 for cylindrical spreading, for spherical spreading k = 2 and k = 1.5 for practical spreading [73]. Log \(A_0\) is called normalizing factor which is the inverse of transmitted power. The variables are representing the attenuation coefficient (in dB/m), they depend on environmental conditions [76]. The variable f represents frequency (in kHz), S shows salinity (in ppt), temperature shows by T (in ° C), and c is the speed of acoustic wave propagation (in m/s), z and H are showing the depth of water (in m). Path losses increase when frequency and distance between transmitter and receiver increases.
6.2 Acoustic Transducer
Acoustic transducers are the devices that transform electrical signals into the sound signal or vice versa. The conversion entailing electrical signals to sound waves through transmitter and sound to electrical signal throughout the receiver. A transmitter is known as a projector or source while the receiver is known as hydrophones in underwater acoustic communication. Generally, the acoustic transducers have functioned as transmitter and receiver as modems. The modems specially used and designed for underwater communication system those mount with the floating devices such as buoy or boat. Transmitter or sources are generally Omni-directional or hemispherical, but the hydrophones (receivers) can be directional or omnidirectional [14]. When the properly combined array of the signal acquired several omnidirectional receivers (hydrophones) can compose an array for high probability to improve the performance of the system. Most commonly, the transducers are piezoelectric a magnetostrictive type [71].
6.3 Technical Issues in Underwater Wireless Acoustic Communication
-
Absorption: This is a process of wave absorption and conversion into heat due to intrinsic properties of the water medium. The diminishing energy of acoustic waves by signal propagation in water suffer absorption and directly has an effect on frequency. Thus absorption depends on signal frequency. In (15) the absorption coefficient can be calculated in underwater.
$$\begin{aligned} \begin{aligned} \alpha &=0.016[{(f_1f^2)/(f_1^2+f^2)}\exp ^{(pH-8)/0.56}]\\&+0.52[{1+(T/43)}(S/35){(f_2f^2)/(f_2^2+f^2)}\exp ^{(-z/6)}]\\&+0.00049f^2\exp ^{-(T/27)+(z/17)}, \end{aligned} \end{aligned}$$(15)
Where \(\alpha\) represents the attenuation in dB/km while f is the frequency in kHz, z is the depth in km. T is the temperature in degree centigrade and salinity S in ppt. The first and second terms are chemical and boric acid, the last term is magnesium sulfate and pure water contribution respectively [1].
In underwater communication, noises are classified in terms of external interference [77]. There are various sources of ambient noise in deep water at the specific frequency range, the influences of each source are differently dependent. For more specification \(f < 10\,\mathrm{Hz}\) responsible for earthquakes, turbulence in the ocean, atmospheric storms, and underwater Volcano eruptions are the main sources of noise. For frequency ranges \(10< f < 100\,\mathrm{Hz}\) responsible for traffic of distant shipping. The frequency range \(100\,\mathrm{Hz}< f < 100\, \mathrm{kHz}\) responsible for the wind speed on the sea surface. For \(f > 100\,\mathrm{kHz}\)is the main issue and responsible for thermal noise. An external interference includes mammals, ice cracking, etc. They also produce acoustic waves whose frequencies are in a sub-range of \(100\, \mathrm{Hz}< f < 200\,\mathrm{kHz}\), causing to rise in interference in the received signal. These noise properties depend on frequency propagation in ocean area and maybe intermittent [78].
In underwater acoustic communication, the main issues which influence the communication include noise, path, and multi-path losses, Doppler spread, high and variable propagation delay. All above these losses and factors determine the temporal and spatial variability of the acoustic channel which also affects the range, frequency, and bandwidth. The band-width needs few kHz for several tens of kilometers while for short-range it may be more than a hundred kHz. These factors lead to low bit rates in both of the conditions. Acoustic nodes are power consuming, bulky and expensive [79]. Underwater acoustic wireless sensor networks (UAWSNs) are costeffective and creating a large scale demand of cost to establish and inefficiency of power batteries to replacing which makes it more problematic [5].
The different types of noise and losses occur in shallow and deep water. Losses are the main factors occur during propagation that affects the efficiency and permanence of the system. Absorption, scattering and energy losses consider the main drawbacks in the underwater environment. Man-made noises refer to the noise produced by machinery tools, water pumps, ships, and submarine while the ambient noise considers the hydrodynamics properties of water movement such as water tides, bubbles, fain, rain, thunderstorm, and earthquakes, etc. The geometric expansion contributes losses in terms of energy per unit of area. The spherical geometric expansion considers energy loss in deep-sea while cylindrical geometric expansion is taken into an account in shallow water. Another degradation process of the acoustic signal is multi-path propagation loss that generates Inter-Symbol-Interference (ISI) and destruction of digital information. Multi-path propagation depends on configuration link. Doppler spread is the most important and noticeable in UWAC because of a slow destruction in the performance of digital communication and transmission at a high data rate [5].
6.4 Doppler Effect in Underwater Acoustic Communication
In high delay and delay-variance, the propagation speed of acoustic waves in the UWAC channel is about five times lower than in RF communication. Very high delay variance is even more harmful to efficient protocol design as it prevents accurate estimation in round trip time, which is a key measure for many common communication protocols. Another main and important issue in acoustic communication is the mitigation of the Doppler effect that needs to study and be utilized in underwater communication. It is a possible solution to channel estimation by a set up of multi-carrier transceivers and sensor nodes, but due to high Doppler effect, it affects sub-channel orthogonally with sub-carriers. The Doppler distortion could be difficult to ignore while the floating device (buoy) and vessels (receiver) are in rest. Doppler effect produces and shows the time wrapping when the signal is transmitted. Time wrapping distorts signal phase in the contraction and expansion of signals propagation. Time wrapping can be calculated by a modification of the time index from t to \(t = [t+\rho (t)]\). where \(\rho (t)\) depends on \(v_R\cos \phi +v_T\cos \theta\). In the following term \(v_R\), \(v_T\) are the speed of the receiver and transmitter. The angles \(\phi\) and \(\theta\) are the signal propagation on transmitter and receiver which is shown in Fig. 6. Through corresponding relation, the speed and angles are the time-dependent and \(\rho\)(t) also depend on time which is called the Doppler factor. The factor \(\rho\)(t), effects may be compensated by proper adjustment of the sampling frequency followed by signal phase correction [14]. The Doppler effect estimation must be robust and resilient. A wide discussion to diminishing and compensating Doppler effect has been represented in [80]. In UWAC, another issue is channel impulse response. The propagation speed of electromagnetic waves higher then the propagation speed of acoustic waves in the air and the time of coherence in the acoustic channel is less than that in RF channel. So there is a higher spread delay. The possible approach to avoid this issue is also mentioned in [80].

Transmitter and Receiver moving with respect to propagation medium
Mostly described factors are caused by the chemical and physical water properties in terms of temperature, salinity, density and by their spatio-temporal variations. These variations are together with the wave-guide nature of the channel because the acoustic channel is a temporal and spatial variable. Particularly in consideration of deep and shallow water, the horizontal channel is by far more rapidly varying than the vertical channel.
6.5 Future Directions
UWC is a recent methodology over the last several decades and still in more exploring phase of research. The newly techniques discussed have been announced and suggested to underwater communication. Underwater acoustic communication (UAC) is the unique and most widely used wireless carrier with low signal attenuation of sound. UAC has become an extensive direction of exploration in many fields and research industries in recent years. In UAC, related issues and applications are presented as an overview mainly used by military, naval, and industrial domains. The challenges of underwater communication can be more precise by the proper fixing of UWSNs. The use of orthogonal frequency division multiplexing (OFDM) and generalized frequency division multiplexing (GFDM) experimental techniques will be a revolutionary step in this direction.
6.6 Summary
For efficient UWAC and achieving challenges, a detailed study of acoustic wave propagation and communication has been recommended. In comparison with RF and optical underwater communication has low latency and bandwidth but offers the most evidential channel to enable underwater communication. For high speed signal propagation in underwater, the UWAC is challenging to deploy due to finite bandwidth, multi-path extension, sever fading and Doppler effect. UWC channel requires vital modifications which is compatible with the underwater medium as compared to terrestrial electromagnetic wave propagation. UWSNs are also an advantageous networking technique for transmitting information with an underwater base station (UWBS). The classification and issued related to UWSNs has been discussed in this article (Table 9).
7 Comparison of Acoustic, Electromagnetic (RF) and Optical Technologies in Underwater Environment
Above technologies in this paper, each one of them has its own characteristics and it defines which environmental condition or channel is used for communication requirement. Before a comparison of these technologies, we should know the properties, characteristics, type of channel and for what purpose the technology is going to be used. There is a summary of the features and drawbacks of wireless communication technology mentioned in Tables 4 and 10, which have been discussed in the paper to understand the proper solution. The tables include and compare the distinct water properties that mostly affect each wireless communication technology in underwater. In Tables 4 and 10, containing the natural properties and parameters of the channel which affect to signal propagation such as saline water for RF communication, the water turbidity for optical communication and the depth of water effect to acoustic communication has been mentioned.
Theoretically, EM waves are usable in water, but over short distances due to high attenuation. Optical signal propagation is a solution for achieving high data rate over moderate distances. A blue-green laser suffers from scattering and requires a high precision pointing position. In the comparison of discussed communication techniques, the acoustic waves appear as the preferable solution. However, the channel is far from ideal, especially in the very shallow water conditions. It has a very limited bandwidth causes severe signal dispersion both in time and frequency domain. Therefore, acoustic waves may be affected by background noise, reflection, refraction and by the physiochemical characteristics of the channel. The speed of acoustic propagation in water is adversely very slow as compared with electromagnetic and optics waves. EM and optical waves communication are also another limiting technique for effective communication.
Still, acoustic waves are the best technical implements for underwater communication. Thus, the existing acoustic applications have been exposed. At present, the work in underwater acoustic communication and networking is generating a huge amount of different systems. In UWSNs solution, it may be possible that nodes could be configured data by themselves according to the distance, propagation data rate with the ROV or UAVs and neighboring nodes with using the particular technology type. To achieving robust and more reliable communication, the challenges introduced in the paper are flexible communication. The flexible system could provide a healthy network and proper communication among devices. Through this flexible communication system could achieve a maximum transmission rate between transmitter and receiver. The typical and heterogeneous system could be changed for signal propagation perfection and transmission switching technology or reception on the predefined cost function that would send an acknowledgment signal during a particular time for necessary action.
Since all the three types of underwater communication techniques have inherent parameters due to an increment of distance, the communication systems included several sensor arrays and relays, and application of aid of smart protocols that could be a possible solution. In all these technologies mentioned, there are movable and fixed network nodes which ideally transmits and receives signals through existing communication technologies. The movable sensors keep a connection between fixed and anchored nodes which should be a smart and adequate efficient communication solution by optimizing an appropriate cost.
8 Underwater Sensor Networks
Underwater sensor networks (UWSNs) is a group of sensors that is established to record and explore data from deep-sea environment [88]. The sensor networks completely wired or wireless that exchanges information with the buoy or base station showed by Figs. 1 and 3. UWSNs is the solution that can make a possible communication among devices, data retrieval, exchange the information device to device and is a broader sense to any activity in deep sea water. In the general scenario the main purpose of study and research of UWSNs about oceanography, seismic surveillance of the cause of earthquakes, monitoring of marine life, natural disaster and its prevention control, etc, [16]. UWSNs architecture also has a benefit to the detection of natural oil and gas resources, military operations and tactical surveillance applications [74]. In these above applications, UWSNs have an array of sensor network nodes which are fixed or anchored with the bottom of the ocean that has to exchange valuable information throughout underwater floating nodes (AUVs and ROVs nodes) or onshore nodes (sub-station) on seawater surface [88]. The sensor networks use multi-hop communication through an underwater gateway node, that has the capability to perform all necessary receiving protocol conversion into distinct useful signals [19]. Even the fixed nodes on the sea bottom have an interaction with each other to estimate a high probability of gathering the exact and more defined information. The concerning application needs to include essential devices in an underwater environment which whole application system called UWSNs.
UWSNs, in order to send and receive signals from the floating device on unknown coordinates, may require the specified coverage area for communication range. ROVs and AUVs widely use to depressed and retrieve data from a monitoring device for short-range using low power [89]. For transmission of large bandwidth and high data rate, ROVs and AUVs could play an important role as a network node for signal transmission with high bandwidth and data rates. ROVs and AUVs have new challenges to UWSNs and quite difficult to deploy with specific application and constraints. The UWSNs with the wired or wireless network is regarded to be a natural solution in order to fulfill the system requirements.
8.1 Underwater Sensor Requirement
Underwater sensor nodes should be capable of storing data that grasp from other sensors. There are different sensor network nodes which acquired data from other types of sensors and monitors the physical properties related to temperature, pressure and the velocity of flowing water. Hence, the underwater sensor nodes may require a large capacity of buffer for storing data before signal transmission. The energy efficiency is an issue in underwater sensor networks and taking into an account to reduce it. Due to the technical properties of underwater nodes, the required energy should higher than the energy of transmitting signals as compare to the energy required to receive and analyze data. Therefore, the power batteries are the main issues and not easily replace and rechargeable in UWSNs architectures. Hence, the design should be precise and more perfect to diminish this particular fact. The other requirement in UWSNs is to improve the efficiency of transmission and receiving signals in the study of proper installation of sensor nodes. In robust condition, they may operate in unfriendly circumstances. There are different requirement, configurations, and interfaces needed to install flexible nodes in place of rigid ones. Also, the protocol stack necessary to implement in UWSNs must guarantee the reliability of signals transmission. It is not an easy task to establish guaranteed reliability in a more sophisticated environment where the high data rate required in underwater communication of its complexity (Fig. 7).

Affecting factors, signal fading and propagation losses in different underwater wireless communication techniques
As earlier mentioned in this paper, the acoustic signal propagation shows the lower speed of signaling in UAC as compare with RF and optical communication in the open air. Thus, the delay associated with sharing signal and exchanges among nodes could be very high in UWSNs. Underwater network protocol must be delay tolerant while the acoustic link is subjected to link outage. In UWSNs the channel may have many destructive constraints of signal transmission. There should be an awareness of transmitted packets between UWSNs nodes, this means the cross-layer design plays an important role of data transmission in UWSN protocols, due to high operational and system establishing cost over a large scale sea bed. UWSN has limited energy sources which have a serious performance impact on UWSNs system. Taking an account of battery replacement would be a promising solution to maximize the life of UWSNs and underwater optical sensor network (UWON). An alternative method for energy conservation of UWSNs investigated in [90].
8.2 Underwater Sensor Network Architecture
The underwater sensor network architecture has been structured by the Figs. 1 and 3, where all possible communication tools are used and each of them has a specific role of communication consequently. The UWSNs is an open research issue that needs further analytically investigation for students and researchers. The following two types of UWSN architecture suggested in [20].
8.2.1 Static 2D UWSNs
In this type of UWSNs the nodes anchored with sea bed to monitor the underwater environment and positioning of tectonic plates [91].
8.2.2 Static 3D UWSNs
In this type of UWSNs the application used for monitoring the geo-chemical processes, water streams, pollution, etc [92].
8.3 2D Underwater Sensor Network Architecture
The 2D UWSN has been established by the group of nodes anchored with the ocean bottom and interacted with underwater-sink, which are the network tools to relaying receiving data from fixed nodes to sub-station or with floating buoy situated on the water surface. The 2D structured sensor network has been specified by Fig. 8. The underwater sink equipped by the two transceivers,, a horizontal and vertical transceiver respectively. The horizontal transceiver is used to communicate with the sensors in terms of sending commands, data configuration, and collection of monitored data form nodes. While the vertical transceivers are used to make a healthy communication with the surface station or buoy. The vertical transceiver must be a long-range transceiver up to 10 km in UAC system. Also, the surface station must be equipped with an acoustic transceiver that is able to handle multiple parallel communications with deployed underwater sinks [20].

An overview of 2D Underwater sensor network architecture
8.4 3D Underwater Sensor Network Architecture
The 3D-UWSN is used to observe the physical phenomena and biochemical activities undersea, where the fixed nodes are capable to detect into the 3D communicative environment. The 2D structured sensor network has been depicted by Fig. 9. In the 3D underwater sensors network, the nodes are not fixed but floating with different depths to extracting the signals. The possibility of high bandwidth and frequency would be improved due to a fixed attachment of the sensor node with the buoy through the wire whose length can be regulated. Although, this solution allows easy and quick deployment of a sensor network. 3D sensors network is necessary to define the depth of each sensor node [20].

Scenario of 3D underwater sensor network architecture
8.5 Related Issues of UWSNs
The corresponding UWSN technique as discussed in this article is challenging to deploy in an underwater environment. Due to harsh and more complicated underwater wireless communication. The most common issue is short-range communication, which is associated with RF signal transmission especially in the ocean or deep seawater. Hence, the need to deploy a large number of array sensor nodes in underwater that must not much far to each other. It could be a problematic solution that associated with RF signal propagation. The solution and works against achieving high transmission data rates over a consequent bandwidth reduction and antenna size mounting on floating devices. The speed of electromagnetic waves less due to low frequencies [6]. Therefore, it is necessary to increase the delay tolerance constraints of the corresponding underwater sensor networks. It is hard to find the full the functionality of UWSNs in the presence of RF transmission. To minimize and make a proper communication throughout RF-based underwater networks investigated in [6, 72].
In acoustic communication, a wide range of communication possible through UWSNs nodes. In acoustic communication there is no need to align nodes, It is to simply make a design to fix their coordinates. The required transmitting energy must higher than the receiving energy in terms of processing and storing information in the UAC system. Thus, it is a solution for generating the mechanical waves that can propagate and travel through the water over a large distance.
The possible solution to the concerned issue could be data fragmentation and the specified distance of signal propagation. Related to this issue the problematic solution technique mentioned in [93]. In the concerned problem-solution method, the optimal length taking into an account for bit-error-rate and probability of receiving signal. The methodology is affected by the repetition of the transmission of raw data lengths and the energy spent through control channel in each repetition for the consumption of every re-transmission. The design of UWSNs and its operation, it could be a better option to relay using multi-hop communication and not to spend a large amount of energy should to use keep in contact with much far away nodes. All the above possible solutions should be included and studied in a particular efficient UWSNs. There is a large propagation delay due to the low speed of signal propagation with low velocity in acoustic waves. Additionally, UWSNs deal with link outage. Hence, the received protocol must handle this feature. In our opinion, the perfectly designed communication network system for UWSNs must be considered using optical, acoustic and electromagnetic signal transmitting technologies.
9 Integration of 5G in Underwater Communication
5G is an extendable cellular technology to proliferate smart devices, the introduction of new emerging applications along with an exponential rise in wireless communication. The huge demand of the fifth generation of wireless communication will be the future prospective wireless network with extremely low latency, high data rates, capacity and bandwidth as compared to 4G LTE (Long Term Evolution). According to survey [94, 95] the wireless network had more than half of connected devices and an exponentially rise in internet traffic 51% in 2016 as compared with 32 percent of the growth in average traffic. Internet traffic will tremendously hike by 2021 throughout multimedia devices, video streaming and smartphones over 63% [95]. 5G would be the greatest influential impact among the new applications, suggested by researchers such as the Internet of things (IoT), Smart cities projected applications, Device to Device (D2D) communication, Internet of underwater things (IoUT) and also underwater wireless communication [96].
In the latest survey work on 5G wireless communication [96] where the authors discussed the various key points, effects, and advantages. The required capacity of the wireless network depends on spectral efficiency and bandwidth which is related to the size of network range [97]. The existing 4G LTE cellular wireless network supports to increase in data usage and connectivity. 4G LTE is based on Orthogonal Frequency-Division Multiplexing (OFDM) technique that supports 20 MHz of maximum bandwidth. The bandwidth limitation of the channel makes OFDM is an advantageous and employable modulation technique [98]. Although, OFDM is considered as an advantageous single carrier modulation in combating frequency selective fading. Hence it is less possible to adapt to future requirements because of the need for precise synchronization and spectral efficiency. Therefore, new multi-carrier transmission schemes are needed to address these issues.
The filter bank multi-carrier (FBMC) and generalized frequency division multiplexing (GFDM) are the new promising approaches to support underwater channel communication towards 5G wireless network. An experimental technique based on GFDM and FBMC in underwater wireless communication has been suggested in [98]. GFDM is time and frequency based multicarrier transmission scheme that is derived from FBMC. The transmitting data divide into subgroups and sub-carriers. The future aspects of the latest fifth-generation wireless network to enhance the quality of service (QoS) and quality of energy (QoE) are to be nostrum features of current cellular technology [94].
9.1 5G wireless Network Future Directions
The illusion of fifth-generation wireless networking technology that improves users perceived QoS [94]. Covering all aspects, 5G wireless network panache of user problems and requirement. Beside of fourth-generation LTE enabling technology, a gradual evolution in the necessity of user-oriented smart machinery equipment for e-health solution, e-business, and IoUTs towards 5G networking are imagined. These advanced tools and devices such as the UWSNs and onshore based station are the future aspects for implementing new wireless networking environment. The emerging wireless techniques that support the improvement in bandwidth in the underwater environment are to be nostrum and future perspectives. 5G wireless system is predictable spread for public and private sectors, health care, software services, smart homes, internet of health things (IoHTs) and in underwater communication to perceive high data rate. The possibility of acquiring high data rate and monitoring underwater activities rely towards to 5G network and an experimental technique based on GFDM and FBMC in underwater wireless communication will be future communication medium [98]. Despite, the utilization of radio frequencies (RF) for fifth-generation communication, could be offered difficulty in channel estimation.
The high demand for potential applications, for exploration of natural underwater resources and monitoring of the marine environment, is investigated [99]. The concept of massive MIMO for underwater acoustic (UWA) channel and FBMC modulation technique proposed towards 5G wireless carrier [100]. The similar work suggested that MIMO-OFDM is an appealing solution for high-data-rate transmissions in UWA channels [101]. Most of the researchers publish their work to improve UWC functionality, A most recent survey article on 5G multicarrier underwater wireless communication technique has been proposed, where the author has a discussion and comparison on the different wireless communicative generation and related issues on physical layer [98].
5G wireless networking system is highly recommended wireless communication technique for high latency, data rate and bandwidth propagation between the device to device (D2D) and machine to machine (M2M) for a longer time duration in particular domain [94]. A GFDM experimental model technique on 5G network and its implementation in UWC proposed in [98, 102]. The experimental work on 5G wireless network in underwater domain, named GFDM also mentioned in [102]. A high-speed underwater communication based on OFDM technique provides the further solution in the same direction and has been discussed in [31, 102]. For UWSNs issues and implementation of IoUTs solution has been widely discussed in survey literature [90]. The advantages of electromagnetic waves propagation of signaling, navigation, sensing and terrestrial communication in terms of high potential data rates have been taken into an account [6]. Underwater acoustic communication quality evaluation model base on surface vehicle experimental work and simulation to improve the quality of the channel and signal propagation briefly described in [103]. Most recent survey articles on UWOC have been deeply recounted on the methods of optical wireless communication (OWC) technology in underwater along with the possible solutions including optical beam absorption and scattering phenomena [2, 15, 104]. Absorption and scattering are the main issues during optical signal propagation in different types of underwater mediums. There is a classification of water mediums according to the preference and more achievable results in [2, 14, 15, 104]. Different issues and multi-hope-algorithms in UWSNs are concerning and briefly discussed in [19, 53].
10 Emerging Technologies in Underwater
10.1 Energy Harvesting System for WSNs
The energy harvesting (EH) is the process of capturing and transformed wasted energy into usable electric power where the requirement of energy in terms of heat, vibration and RF signals. EH allows electronics to operate where there is no conventional power source, eliminating the need to run wires or make frequent visits to replace batteries [105]. Due to less possibility to change batteries and charged a capacitor of sensor nodes in the underwater environment the communication link requires the EH system to transfer energy for improving system efficiency. Several existing works have explored the possibilities of using natural energy sources in the EH process within the communication network. The investigated EH natural sources are not fully effective according to the expectation of unforeseeable nature of ambient sources but EH process is only applicable in specific constraints. The investigated Wireless power transmission (WPT) is one of the EH technique where the nodes charge their own batteries through electromagnetic radiation in communication networking area [106]. WPT mostly uses for short distances (nearfield) rather than long distances (far-field) that depends on the application requirement. It has less reliable to transfer energy with information simultaneously over long distances due to channel discontinuity and infeasibility. Thus, to full-fill this requirement the concept of Simultaneous Wireless Information and Power Transfer (SWIPT) investigated in [106]. The authors in [107] discuss various energy constraints discussed and conclude SWIPT as an integral EH technique to improve spectral efficiency, power consumption, and power transmission delay by enabling the simultaneous transmission of both power and information. The high demand growth of radio frequency energy harvesting system (RE-EH) consider to recharging super capacitor or energy stored in batteries of wireless sensor networks (WSNs). The power supply of RFEH has been maintained by a certain rate of RF environment from endless power-consuming devices all around the world. Therefore, the wireless devices now can harvest energy from RF signals according to the power variations over time.
-
(1)
Near-field: The near-field is that remote area where the uniform wavelength transmitting by the antenna. The near-field WPT technique is length-dependent. Due to the increasing distance between transmitter and receiver the power transmission phenomena decreased exponentially. As a result, less power could be transmitted if the distance larger than that wavelength of the transmission medium. In the near-field WPT scenario, the system requires high power transmission efficiency and can be obtained above 80% of power transmission energy efficiency [108]. The high strength of energy can be transfer through inductive, capacitive and resonant inductive couplings.
-
(2)
Far-Field : The remote area where the distance much higher than the diameter of power transmission antenna consider to far-field WPT. In the far-field scenario, the power can be transferred over large distances without electrical wire medium which formally known as energy transformation through microwave and laser beams by electromagnetic radiation as a medium. The microwave power beam shows week performances rather than laser beam due to atmospheric attenuation constraints such as water vapor and suspended dust particles.
-
(3)
SWIPT is an integral recent developing technique instead of WPT that enables the facility of providing power and information simultaneously through a wireless network. The energy and information transfer function in SWIPT is an important factor to evaluate the system performance [106].
-
(4)
UWSNs-EH plays a significant role in accessing data in the aquatic medium. Due to the wide range of applications UWSNs have importance. The structural challenges of UWSN to achieve continual reliable and efficient power supply is to gain high efficiency inadequate environmental energy conditions [109]. Therefore, a multi source energy harvester system proposed on microbial fuel cell (MFC) and acoustic piezoelectric energy harvesting system that supports to the acoustic sensor network. In MFC energy harvesting system the current produce by using bacterial vitality and their metabolic interactions found in open nature. However, Acoustic piezoelectric harvester functioned on resonant waves formed by acoustic resonators. The pressure difference guides the vibrations of the piezoelectric beam at the resonant frequency which outcomes to generate electricity.
However, the establishment of UWSNs has many issues during signal propagation such as energy constraints, dynamic conditions, variation topology and high error probability of signal transmission. The concerning issue is the power supply to sensor nodes. Batteries do not hold long run power capacity supply to sensor nodes in an underwater medium. Thus, energy harvesting is a promising solution for the perpetual energy supply to sensor nodes [110].
The energy consumption is also an additional problem for UWSNs. Therefore, to recharge and replace batteries in an aquatic environment is more complex [111]. The possible solution and hybrid acoustic-optical underwater wireless sensor networks (AO-UWSNs) technique for energy harvesting proposed in order to benefit of acoustic and optical communication in [111]. An experimental scheme of energy harvesting for UWSNs based on galvanic energy has investigated in [112]. The authors in [113] discussed the energy consumption through the galvanic cell with two dissimilar metal zinc and brass electrodes attached with mussel’s shell in an underwater environment. One another EH technique is ocean kinetic energy harvesting system for sensor nodes experimentally investigate (evaluated on 1.1 Hz as a maximum natural frequency and 1 Hz as a minimum damping value) and fabricated in [113]. The authors in [113] proposed a pendulum-type ocean kinetic energy harvester to gain ocean thermal energy to contribute the system efficiency.
10.2 Massive MIMO System Aided Underwater Communication
Acoustic Massive multi-input multi-output (MIMO) in underwater communication enables to enhance the real-time activities, high quality of data transmission between floating buoy and a large array of hydrophones Fig. 10 [114]. Massive MIMO is also known as very large multi-user MIMO (MU-MIMO), hyper-MIMO or full-dimension MIMO systems [115]. Underwater multimedia monitoring application requires a high demand for data traffic. The deployment of MIMO channels in underwater support the various types of multimedia communication contents in the form of mapping, audio, and video conferencing [101]. Thus, the possibility to achieve a high level of bandwidth. Underwater acoustic channels are characterized by low availability of bandwidth and large propagation delays [100]. In this technique the base stations contain several antennas to receive signals from a large group of hydrophone array [114] Fig. 10. The drawback in a massive MIMO system is a point to point connectivity and fading signals when received from a large number of hydrophones. An alternative point-to-point MIMO (MUMIMO) technique to increase the network capacity that has been suggested in [116]. The array of hydrophones can be linear, rectangular or in circular form. The essential spacing between the antenna elements should be larger than half of the wavelength. Every single hydrophone should specify a position to achieve directivity in transmission [117].

An overview of wireless emerging technique Massive MIMO underwater wireless acoustic sensor network architecture
UWSNs consist of distinct devices and network nodes such as connected devices ROV and AUVs. The underwater environment has unique characteristic constraints for instance high delay, low bandwidth, fading problems, and high power consumption. MIMO system is a promising solution to improve throughput, capacity, and energy efficiency in the future. In most of the existing sensor networks, the floating buoy and base station (BS) are equipped with single elector acoustic transducer named Single-Input-Single-Output (SISO) communication. Hence, MIMO massive technique for UWAC with carrier aggregation to boost the data rate to enable realtime, high-quality underwater transmission from an AUV to a surface buoy with a large array of hydrophones which is future aspect and widely discussed in [115].
10.3 Non-orthogonal Multiple Access (NOMA) Assisted Underwater Communication
Non-orthogonal multiple access (NOMA) is a promising multiple radio access technique for next-generation communication networks [118]. NOMA offers a set of desirable benefits including greater spectrum efficiency. It has been classified into three categories, uplink, downlink, and composite architecture [119]. NOMA proposed as cellular networks, in this scheme, the users are separated in the power domain and able to access all available bandwidth simultaneously resulting in performance benefits [120]. In an underwater environment, ROVs and AUVs move over the sensor nodes to extract the oceanographic data from the sensor network. For this concern, it requires both up-link and down-link. NOMA can be easily applied and combined with MIMO massive and millimeter-waves for further support and better system performance in underwater which has been proposed in [119]. An investigated combined technique of NOMA with mm-wave can achieve higher spectrum and energy efficiency [121]. The implementation of NOMA in UWOC, reduce the spectrum allocation problems and improve the efficiency of decoding transmitted data discussed in [122].
NOMA is an important enabling technology for achieving high bandwidth and performance requirements, including high system throughput, low latency, and massive connectivity. NOMA can serve the massive connectivity for multiple users simultaneously and minimize delay. The recent industrial efforts to include NOMA will be an integrated part of future generation wireless networks. The future prediction of NOMA proposed an allocation scheme in UWASNs and equal transmission times (ETT) power allocation scheme which can prevent wasteful resource generation in underwater communication as proposed for the future [118].
10.4 mm-Waves Enabled in Underwater Communication
Demanding high bandwidth for the communication system and improving network capacity are investigating a new wavelength range named millimeter waves. Millimeter-waves frequency band is an alternative supporting technique in UWAC. The wavelength and frequency ranges of mm-waves are 1–10 mm and 150–1500 kHz respectively which is a cause of efficient communication performance in underwater [127]. Millimeter waves communications have more similarity with optical wireless communication since high carrier frequency suffers high propagation loss and more sensitivity to blockage than RF system. The most recent article proposed underwater acoustic millimeter-wave communication channel in [127]. Thus mm-waves are considering to offer high transmission of bandwidth and improve communication performance efficiently for further wireless communication [128]. One other frequency band of millimeter waves have been discussed in [130]. A high possibility to improve the efficiency of data transmission through wide-range frequency band acoustic millimeter-wave communication system proposed [131]. An effective accomplishment of millimeter-waves become an innovative subject to envisage communication technology in underwater. A shrinkage least mean square (LMS) algorithm [131], takes advantage of sparse properties, improving the denoising method of tracking ability in time-varying to achieve high channel estimation accuracy of underwater communication has been proposed in [132].
The information transmitting technology millimeter wave, also one of the fastest growing data transmission technology since the last decade. The millimeter waves have high frequency and wide bandwidth ranges that are typically affected by the channel environment. For future perspectives, the wide range of millimeter-wave frequency band in an underwater acoustic communication supports to improve the information transmission efficiency. 5G wireless technology supports to high data transmission terrestrial to underwater using millimeter waves. High data rate transmission required fiber cables which is difficult to implement. Hence, the millimeter waves are the possible solution to replace traditional fiber optic transmission line to connect the mobile base station. It provides 10 GBps data rate for communication which allows the problem solution of data transmission terrestrial and underwater communication basis [133]. The next level of millimeter wave technology will contribute the high security, surveillance and further applications. It will develop and offer a wide spectrum of applications and will represent the “wave” of the future [134].
10.5 Internet of Underwater Things (IoUTs)
Internet of things (IoT) refers to connected devices that can operate and easy access in an informative way through wireless and wired internet connectivity. IoT allows exchanging the data among physical objects such as computers, home appliances, advance mode of transportation via specific applications software, sensors, and actuators. The requirement of IoUTs to monitor, observation of marine life, secure information exchange, the study of natural hazards, disaster prevention and exploration of vast ocean volume and understanding of underwater habitats [90]. The interconnected underwater devices and underwater sensors are an integral part of IoT known as IoUTs that use to improve QoS of the system [135]. Hence, the real-time transmission of sensing data from underwater objects becomes challenging. According to the Fig. 1, fixed and anchored sensor nodes transform sensed data to sink or buoy acoustically through ROVs or UUVs while the buoys are directly connected with an onshore base station through RF link [16]. Most of the IoUT are referred to as Figs. 1 and 3. The entire work of muti-stage AUVs localization global positioning scheme for UWSNs investigated [136]. The related work for detection of ocean pollution through decentralized ad-hoc wireless sensor network proposed in [137] (Fig. 11).

Proposed underwater wireless communication emerging techniques
Still, as today, the ocean basins are less well mapped, explored and less understood than the Moon or even Mars. The future directions for implementing IoUTs handling big data in terms of electrical conductivity, dissolved oxygen, and temperature in an underwater environment through ROVs and portable UWSNs [138]. The IoUTs could help us to live in tall buildings or “Earth scrapers”, huge structures that tunnel based 25 stories in underwater and support to easily communicate with the base station. The prediction of underwater houses are powered by IoUTs besides of “medipods” will diagnose of sickness and supply medicine or remote surgeon if needed [139]. The future of mankind is dependent on careful monitoring control and sustainable exploitation of marine environments. Hence, IoUTs will be more suitable for a wide range of submarine tasks, repair pipeline, seismic detection, and under-ice ecological monitoring and applications [140]. The future perspective of IoUTs are becoming a critical frontier of exploration for transport, oxygenate and food production, hydrocarbon exploitation, aquaculture, biofuel production, mineral exploitation, climate, and global water circulation.
11 Conclusion
The underwater communication that enables a platform to build up a network connection among floating devices where the channel and communication environment having crucial difficult properties and challenges. The technologies discussed are the possible solution and clear understanding of the mechanism of deployment. 5G wireless networking technique proposed to support RF, acoustic and optical signal carrier for improving communication probabilities. The emerging technologies including the architecture of UWSNs are challenging and more sophisticated for signal propagation, but the appropriate network nodes design has an important key to understand and determine effective data analysis between source and receiver with required data rates for the necessary possible communication. According to the relevant communication technologies requirement, a distinct channel modeling to setup conceiving network communication to flexible or fixed network nodes are quite challenging. This paper has been contributing and providing a survey of the technical issues, challenges and future directions in underwater environmental communication.
References
Loo J, Mauri JL, Ortiz JH (2016) Mobile ad hoc networks: current status and future trends. CRC Press, Boca Raton
Zeng Z, Fu S, Zhang H, Dong Y, Cheng J (2017) A survey of underwater optical wireless communications. IEEE Commun Surv Tutor 19(1):204–238
Khalighi MA, Uysal M (2014) Survey on free space optical communication: a communication theory perspective. IEEE Commun Surv Tutor 16(4):2231–2258
Vaccaro RJ (1998) The past, present, and the future of underwater acoustic signal processing. IEEE Signal Process Mag 15(4):21–51
Saeed N, Celik A, Al-Naffouri TY, Alouini M-S (2019) Underwater optical wireless communications, networking, and localization: a survey. Ad Hoc Netw, 101935
Rhodes M (2007) Electromagnetic propagation in sea water and its value in military systems. In: SEAS DTC technical conference, pp 1–6
Al-Shamma’a AI, Shaw A, Saman S (2004) Propagation of electromagnetic waves at mhz frequencies through seawater. IEEE Trans Antennas Propag 52(11):2843–2849
Al-Kinani A, Wang C-X, Zhou L, Zhang W (2018) Optical wireless communication channel measurements and models. IEEE Commun Surv Tutor 20:1939–1962
Uysal M, Capsoni C, Ghassemlooy Z, Boucouvalas A, Udvary E (2016) Optical wireless communications: an emerging technology. Springer, Berlin
Goodwin FE (1970) A review of operational laser communication systems. Proc IEEE 58(10):1746–1752
Lanbo L, Shengli Z, Jun-Hong C (2008) Prospects and problems of wireless communication for underwater sensor networks. Wirel Commun Mobile Comput 8(8):977–994
Lurton X (2002) An introduction to underwater acoustics: principles and applications. Springer, Berlin
Lanzagorta M (2012) Underwater communications. Synth Lect Commun 5(2):1–129
Gussen C, Diniz P, Campos M, Martins WA, Costa FM, Gois JN (2016) A survey of underwater wireless communication technologies. J Commun Inf Sys 31(1):242–255
Kaushal H, Kaddoum G (2016) Underwater optical wireless communication. IEEE Access 4:1518–1547
Akyildiz IF, Pompili D, Melodia T (2005) Underwater acoustic sensor networks: research challenges. Ad hoc Netw 3(3):257–279
Smith RC, Baker KS (1981) Optical properties of the clearest natural waters (200–800 nm). Appl Opt 20(2):177–184
Gaurav Mishra JK (March 2018) A survey of underwater communication, 2018, p. white paper
Zhu Z, Guan W, Liu L, Li S, Kong S, Yan Y (2014) A multi-hop localization algorithm in underwater wireless sensor networks. In: Sixth International Conference on Wireless Communications and Signal Processing (WCSP). IEEE, pp 1–6
Akyildiz IF, Pompili D, Melodia T (2004) Challenges for efficient communication in underwater acoustic sensor networks. ACM Sigbed Rev 1(2):3–8
Zoksimovski A, Sexton D, Stojanovic M, Rappaport C (2015) Underwater electromagnetic communications using conduction-channel characterization. Ad Hoc Netw 34:42–51
Chitre M, Shahabudeen S, Freitag L, Stojanovic M (2008) Recent advances in underwater acoustic communications & networking. In: OCEANS 2008. IEEE, pp 1–10
Johnson LJ, Jasman F, Green RJ, Leeson MS (2014) Recent advances in underwater optical wireless communications. Underw Technol 32(3):167–175
Kumar P, Trivedi VK, Kumar P (2015) Recent trends in multicarrier underwater acoustic communications. In: Underwater technology (UT), 2015 IEEE. IEEE, pp 1–8
Jiang S (2018) On securing underwater acoustic networks: a survey. IEEE Commun Surv Tutor 21:729–752
Sandeep D, Kumar V (2017) Review on clustering, coverage and connectivity in underwater wireless sensor networks: a communication techniques perspective. IEEE Access 5:11 176–11 199
Akyildiz IF, Su W, Sankarasubramaniam Y, Cayirci E (2002) Wireless sensor networks: a survey. Comput Netw 38(4):393–422
Domingo MC (2012) An overview of the internet of underwater things. J Netw Comput Appl 35(6):1879–1890
Palmeiro A, Martin M, Crowther I, Rhodes M (2011) Underwater radio frequency communications. In: OCEANS 2011 IEEE-Spain. IEEE, pp 1–8
Al-Aboosi YY, Ahmed MS, Shah NSM, Khamis NHH (2006) Study of absorption loss effects on acoustic wave propagation in shallow water using different empirical models. J Eng Appl Sci 12(22):6474–6478
Huang J, Sun J, He C, Shen X, Zhang Q (2005) High-speed underwater acoustic communication based on ofdm. In: IEEE international symposium on microwave, antenna, propagation and EMC technologies for wireless communications, vol 2. IEEE, pp 1135–1138
Garcia M, Sendra S, Atenas M, Lloret J (2011) Underwater wireless ad-hoc networks: a survey. Mobile ad hoc networks: current status and future trends, pp. 379–413. Available: https://www.taylorfrancis.com/books/e/9780429192227
West Lothian U (2007) Electromagnetic propagation in sea water and its value in military systems. In: SEAS DTC Technical Conference, pp. 1–6
Kaur N, Singh P, Kaur P (2016) Under water environment: a brief of explored work and future scope. Int J Comput Appl 0975:8887
Gabriel C, Khalighi M-A, Bourennane S, Léon P, Rigaud V (2013) Monte-carlo-based channel characterization for underwater optical communication systems. J Opt Commun Netw 5(1):1–12
Cochenour BM, Mullen LJ, Laux AE (2008) Characterization of the beam-spread function for underwater wireless optical communications links. IEEE J Ocean Eng 33(4):513–521
Apel JR (1987) Principles of ocean physics, vol 38. Academic Press, New York
The Sciencing Site (2018) Four biggest differences between the ocean fresh water. https://sciencing.com/four-between-oceanfresh-water-8519973.html. Accessed 25 Feb 2018
Hanson F, Radic S (2008) High bandwidth underwater optical communication. Appl Opt 47(2):277–283
Johnson L, Green R, Leeson M (2013) A survey of channel models for underwater optical wireless communication. In: 2013 2nd International Workshop on optical wireless communications (IWOW). IEEE, pp 1–5
Under world project (2016) The Under World Project. Available: http://www.underworldproject.eu/the-project. Accessed 10 Oct 2018
Under water acoustic network project (2011) [Online]. Available: https://cordis.europa.eu/project/rcn/87609/factsheet/en
Smart and networking underwater robots in cooperation meshes (swarms) project (2018) [online]. Available: https://www.up2europe.eu/european/projects
Broadband wireless networking lab, underwaer communication project (2008) [Online]. Available: http://bwn.ece.gatech.edu/UWASN/work.html
Building the internet of underwater things, underwater communication project scheme (2013) [Online]. Available: http://fp7-sunrise.eu/index.php/partners
Wsense underwater node deployment, underwater sensor nodes project (2018) [Online]. Available: http://www.archeosub.eu/index.php/en/
Distributed, efficient, ubiquitous and secure data delivery using autonomous underwater vehicles project scheme (2017) [Online]. Available: http://panlab.ece.uh.edu/projects/cps-dues/
S. system (2018) Stress wave assisted communications in subsea environments, p. white paper
Underwater communications (2012) The SHOAL project. https://www.roboshoal.com/featureditems/underwater-communication/. Accessed 30 Oct 2018
Belov LA, Smolskiy SM, Kochemasov VN (2012) Handbook of RF, microwave, and millimeter-wave components. Artech house, London
Chen Y, Pan W-y, Peng H-y, Zhang H-q (2010) “The elf/vlf field at the depth of submarine excited by satellite electropult. In: 2010 9th international symposium on antennas propagation and EM theory (ISAPE). IEEE, pp 505–508
Dowden RL, Holzworth RH, Rodger CJ, Lichtenberger J, Thomson NR, Jacobson AR, Lay E, Brundell JB, Lyons TJ, Kawasaki Z et al (2008) World-wide lightning location using vlf propagation in the earth-ionosphere waveguide. IEEE Antennas Propag Mag 50(5):40–60
Che X, Wells I, Dickers G, Kear P, Gong X (2010) Re-evaluation of rf electromagnetic communication in underwater sensor networks. IEEE Commun Mag 48(12):143–151
Christian, Electromagnetic spectrum (2015) [Online]. Available: https://bit.ly/2Z3EpNI. Accessed 10 Sept 2018
U. S. Navy (2001) Extremely low frequency transmitter site clam lake, wisconsin, White Page, Navy Fact File
Shaneyfelt T, Joordens MA, Nagothu K, Jamshidi M (2008) Rf communication between surface and underwater robotic swarms. In: Automation congress, 2008. WAC 2008. World. IEEE, pp 1–6
Dautta M, Hasan MI (2017) “Underwater vehicle communication using electromagnetic fields in shallow seas. In: International conference on electrical, computer and communication engineering (ECCE). IEEE, pp 38–43
Yunus F, Ariffin SH, Zahedi Y (2010) A survey of existing medium access control (MAC) for underwater wireless sensor network (UWSN). In: 2010 Fourth Asia international conference onmathematical/analytical modelling and computer simulation (AMS). IEEE, pp 544–549
Cossu G, Corsini R, Khalid A, Balestrino S, Coppelli A, Caiti A, Ciaramella E (2013) Experimental demonstration of high speed underwater visible light communications. In: 2013 2nd international workshop on optical wireless communications (IWOW) . IEEE, pp 11–15
Wang C, Yu H-Y, Zhu Y-J (2016) A long distance underwater visible light communication system with single photon avalanche diode. IEEE Photon J 8(5):1–11
Darlis AR, Cahyadi WA, Darlis D, Chung YH (2016) Underwater visible light communication using maritime channel. In: Proceedings of Conference of Korea Institute Signal Processing Systems KISPS), pp 1–3
Grobe L, Paraskevopoulos A, Hilt J, Schulz D, Lassak F, Hartlieb F, Kottke C, Jungnickel V, Langer K-D (2013) High-speed visible light communication systems. IEEECcommun Mag 51(12):60–66
Anguita D, Brizzolara D, Parodi G (2010) Prospects and problems of optical diffuse wireless communication for underwater wireless sensor networks. In: Wireless sensor networks: application-centric design. InTech
Miramirkhani F, Uysal M (2018) Visible light communication channel modeling for underwater environments with blocking and shadowing. IEEE Access 6:1082–1090
Zhang H, Dong Y (2015) Link misalignment for underwater wireless optical communications. In: Advances in wireless and optical communications (RTUWO), 2015. IEEE, pp 215–218
Simpson JA et al (2008) A 1 mbps underwater communications system using leds and photodiodes with signal processing capability [Online]. Available: https://sciencing.com/four-between-oceanfresh-water-8519973.html
Haltrin VI (1999) Chlorophyll-based model of seawater optical properties. Appl Opt 38(33):6826–6832
Simpson JA, Hughes BL, Muth JF (2012) Smart transmitters and receivers for underwater free-space optical communication. IEEE J Sel Areas Commun 30(5):964–974
Bajwa N, Sharma V (2014) Smart transmitters and receivers for underwater free-space optical communication–a review. In: International conference on communications, computing & systems
Brundage H (2010) Designing a wireless underwater optical communication system. Ph.D. dissertation, Massachusetts Institute of Technology
Jensen FB, Kuperman WA, Porter MB, Schmidt H (2011) Computational ocean acoustics. Springer, Berlin
Etter PC (2018) Underwater acoustic modeling and simulation. CRC Press, Boca Raton
Stojanovic M (2007) On the relationship between capacity and distance in an underwater acoustic communication channel. ACM SIGMOBILE Mob Comput Commun Rev 11(4):34–43
Gkikopouli A, Nikolakopoulos G, Manesis S (2012) A survey on underwater wireless sensor networks and applications. In: 2012 20th Mediterranean Conference on control & automation (MED) . IEEE, pp 1147–1154
Ainslie MA, McColm JG (1998) A simplified formula for viscous and chemical absorption in sea water. J Acoust Soc Am 103(3):1671–1672
Domingo MC (2008) Overview of channel models for underwater wireless communication networks. Phys Commun 1(3):163–182
Zhou S, Wang Z (2014) OFDM for underwater acoustic communications. Wiley, Hoboken
Brekhovskikh LM, Lysanov YP, Lysanov JP (2003) Fundamentals of ocean acoustics. Springer, Berlin
Partan J, Kurose J, Levine BN (2007) A survey of practical issues in underwater networks. ACM SIGMOBILE Mobile Computing and Communications Review 11(4):23–33
Zakharov YV, Li J (2016) Sliding window adaptive filter with diagonal loading for estimation of sparse uwa channels. In: OCEANS 2016-Shanghai. IEEE, pp. 1–5
Abdalkarim Tahir F (2015) Open ocean underwater wireless optical communication: chlorophyll and depth dependent variation in attenuation. Ph.D. dissertation, Universiti Tun Hussein Onn Malaysia
Dickey T, Lewis M, Chang G (2006) Optical oceanography: recent advances and future directions using global remote sensing and in situ observations. Rev Geophys 44(1):1–39
Stojanovic M, Preisig J (2009) Underwater acoustic communication channels: propagation models and statistical characterization. IEEE Commun Mag 47(1):84–89
Chitre M, Shahabudeen S, Stojanovic M (2008) Underwater acoustic communications and networking: Recent advances and future challenges. Mar Technol Soc J 42(1):103–116
Amini P, Chen R-R, Farhang-Boroujeny B (2015) Filterbank multicarrier communications for underwater acoustic channels. IEEE J Ocean Eng 40(1):115–130
Wells I, Davies A, Che X, Kear P, Dickers G, Gong X, Rhodes M (2009) Node pattern simulation of an undersea sensor network using rf electromagnetic communications. In: International conference on ultra modern telecommunications & workshops, 2009 (ICUMT’09). IEEE, pp 1–4 (2009)
Che X, Wells I, Kear P, Dickers G, Gong X, Rhodes M (2009) A static multi-hop underwater wireless sensor network using. In: 2009 29th IEEE international conference on distributed computing systems workshops. IEEE, pp 460–463
Guo Z, Li Z, Hong F (2009) USS-TDMA: self-stabilizing TDMA algorithm for underwater wireless sensor network. In: International conference on computer engineering and technology, 2009 (ICCET’09) , vol. 1. IEEE, pp 578–582
Han G, Jiang J, Shu L, Xu Y, Wang F (2012) Localization algorithms of underwater wireless sensor networks: a survey. Sensors 12(2):2026–2061
Kao C-C, Lin Y-S, Wu G-D, Huang C-J (2017) A comprehensive study on the internet of underwater things: applications, challenges, and channel models. Sensors 17(7):1477
Davis A, Chang H (2012) Underwater wireless sensor networks. In: Proceedings of IEEE oceans, pp. 1–5
Freitag L, Stojanovic M, Grund M, Singh S (2002) Acoustic communications for regional undersea observatories. In: Proceedings of oceanology international, pp 5–8
Sun Y (2013) The internet underwater: an IP protocol stack for commercial undersea modems. State University of New York at Buffalo
Agiwal M, Roy A, Saxena N (2016) Next generation 5g wireless networks: a comprehensive survey. IEEE Commun Surv Tutor 18(3):1617–1655
CISCO (March 2017) Global mobile data traffic forecast update, 2016–2021, p white paper
Pirinen P (2014) A brief overview of 5g research activities. In: 1st international conference on 5G for ubiquitous connectivity (5GU), 2014. IEEE, pp 17–22
Stallings W (2007) Data and computer communications. Pearson Education India, New Delhi
Wu J, Ma X, Qi X, Babar Z, Zheng W (2017) Influence of pulse shaping filters on papr performance of underwater 5g communication system technique: GFDM. In: Wireless communications and mobile computing, vol 2017
Akyildiz IF, Pompili D, Melodia T (2006) State-of-the-art in protocol research for underwater acoustic sensor networks. In: Proceedings of the 1st ACM international workshop on Underwater networks. ACM, pp. 7–16
Aminjavaheri A, Farhang-Boroujeny B (2015) UWA massive mimo communications. In: OCEANS’15 MTS/IEEE Washington. IEEE, pp 1–6
Li B, Huang J, Zhou S, Ball K, Stojanovic M, Freitag L, Willett P (2009) Mimo-ofdm for high-rate underwater acoustic communications. IEEE J Ocean Eng 34(4):634–644
Jinqiu W, Gang Q, Pengbin K (2018) Emerging 5g multicarrier chaotic sequence spread spectrum technology for underwater acoustic communication. Complexity 2018
Lv Z, Zhang J, Jin J, Li Q, Liu L, Zhang P, Gao B (2018) Underwater acoustic communication quality evaluation model based on USV. Shock Vib 8:52–423
Giles JW, Bankman IN (2005) Underwater optical communications systems. part 2: basic design considerations. In: Military communications conference, 2005 (MILCOM 2005). IEEE, pp 1700–1705
Energy harvesting in underwater acoustic networks, p. white paper, 2012
Perera TDP, Jayakody DNK, Sharma SK, Chatzinotas S, Li J (2017) Simultaneous wireless information and power transfer (swipt): recent advances and future challenges. IEEE Commun Surv Tutor 20(1):264–302
Chen X, Ng DWK, Chen H-H (2016) Secrecy wireless information and power transfer: challenges and opportunities. IEEE Wirel Commun 23(2):54–61
Yoon I-J (2015) Wireless power transfer in the radiating near-field region. In: Radio science meeting (joint with ap-s symposium), 2015 USNC-URSI. IEEE, pp 344–344
Srujana BS, Mathews P, Harigovindan V et al (2015) Multi-source energy harvesting system for underwater wireless sensor networks. Proc Comput Sci 46:1041–1048
Porcarelli D, Brunelli D, Magno M, Benini L (2012) A multi-harvester architecture with hybrid storage devices and smart capabilities for low power systems. In: 2012 international symposium on power electronics, electrical drives, automation and motion (SPEEDAM), vol. 946, no. 951. IEEE, pp 20–22
Saeed N, Celik A, Al-Naffouri T, Alouini M-S (2018) Energy harvesting hybrid acoustic-optical underwater wireless sensor networks localization. Sensors 18(1):51
Rezaei HF, Kruger A, Just C (2012) “An energy harvesting scheme for underwater sensor applications. In: 2012 IEEE international conference on electro/information technology (EIT). IEEE, pp 1–4
Ding W, Song B, Mao Z, Wang K (2015) Experimental investigation on an ocean kinetic energy harvester for underwater gliders. In: 2015 IEEE energy conversion congress and exposition (ECCE). IEEE, pp 1035–1038
Zhao X, Pompili D (2015) AMMCA: acoustic massive MIMO with carrier aggregation to boost the underwater communication data rate. In: Proceedings of the 10th international conference on underwater networks & systems. ACM, p 5
Lawal B, Ali SSA, Awang AB (2016) Massive mimo systems for underwater acoustic communication. In: IEEE international conference on Underwater system technology: theory and applications (USYS). IEEE, pp 159–164
Gesbert D, Kountouris M, Heath RW, Chae C-B, Salzer T (2007) From single user to multiuser communications: shifting the mimo paradigm. IEEE Signal Process Mag 24(5):36–46
Mehmood Y, Afzal W, Ahmad F, Younas U, Rashid I, Mehmood I (2013) Large scaled multi-user MIMO system so called massive mimo systems for future wireless communication networks. In: 2013 19th international conference on automation and computing (ICAC). IEEE, pp 1–4
Cheon J, Cho H-S (2017) Power allocation scheme for non-orthogonal multiple access in underwater acoustic communications. Sensors 17(11):2465
Wan D, Wen M, Ji F, Yu H, Chen F (2018) Non-orthogonal multiple access for cooperative communications: challenges, opportunities, and trends. IEEE Wirel Commun 25(2):109–117
Geldard C, Thompson J, Popoola WO (2018) A study of non-orthogonal multiple access in underwater visible light communication systems. In: 2018 IEEE 87th vehicular technology conference (VTC Spring). IEEE, pp 1–6
Wang B, Dai L, Gao X, Hanzo L (2017) Beamspace mimo-noma for millimeter-wave communications using lens antenna arrays. In: 2017 IEEE 86th vehicular technology conference (VTC-Fall). IEEE, pp 1–5
Pillai AA, Mathew NM (2018) Flexible transmission using nonorthogonal multiple access based underwater optical communication. Int J Innov Res Sci Tech 4(11):175–179
Hamza AS, Deogun JS, Alexander DR (2018) Classification framework for free space optical communication links and systems. IEEE Commun Surv Tutor 21:1346–1382
Jamali MV, Nabavi P, Salehi JA (2018) Mimo underwater visible light communications: comprehensive channel study, performance analysis, and multiple-symbol detection. IEEE Trans Veh Technol 67:8223–8237
Kumar MR, Sarvagya M (2016) Review on enhanced data rate receiver design using efficient modulation techniques for underwater acoustic communication. In: 2016 international conference on IEEE advanced communication control and computing technologies (ICACCCT), pp 313–317
Palou G, Stojanovic M (2009) Underwater acoustic mimo ofdm: an experimental analysis. In: OCEANS 2009, MTS/IEEE Biloxi-marine technology for our future: global and local challenges. IEEE, pp 1–8
Zhang Y, Xiao S, Liu L, Sun D (2016) “Analysis and estimation of the underwater acoustic millimeter-wave communication channel. In: Ocean acoustics (COA), 2016 IEEE/OES China. IEEE, pp 1–5
Leeson M, Higgins M (2018) “Optical wireless and millimeter waves for 5g access networks. In: The fifth generation (5G) of wireless communication. IntechOpen
Torkildson E, Ananthasubramaniam B, Madhow U, Rodwell M (2006) Millimeter-wave MIMO: wireless links at optical speeds. In: Proceedings of 44th allerton conference on communication, control and computing, pp 1–9
Niu Y, Li Y, Jin D, Su L, Vasilakos AV (2015) A survey of millimeter wave communications (mmwave) for 5g: opportunities and challenges. Wireless Netw 21(8):2657–2676
Yang J, Sobelman GE (2010) Sparse lms with segment zero attractors for adaptive estimation of sparse signals. In: 2010 IEEE Asia Pacific conference on circuits and systems (APCCAS). IEEE, pp 422–425
Su G, Jin J, Gu Y, Wang J (2012) Performance analysis of \(l\_0\) norm constraint least mean square algorithm. IEEE Trans Signal Process 60(5):2223–2235
Rajiv R (2017) Applications of millimeter waves and future. [Online]. Available: https://www.rfpage.com/applications-of-millimeter-wavesfuture
DeMartino C (2017) Millimeter Waves are millimeter waves the wave of the future? [Online]. https://www.mwrf.com/community/are-millimeter-waves-wave-future
Xu M, Liu L (2016) Sender-receiver role-based energy-aware scheduling for internet of underwater things. IEEE Trans Emerg Top Comput 7(2):324–336
Waldmeyer M, Tan H-P, Seah WK (2011) “Multi-stage auv-aided localization for underwater wireless sensor networks. In: 2011 IEEE workshops of international conference on IEEE advanced information networking and applications (WAINA), pp 908–913
Khan A, Jenkins L (2008) Undersea wireless sensor network for ocean pollution prevention. In: 3rd international conference on communication systems software and middleware and workshops, 2008 (COMSWARE 2008). IEEE, pp 2–8
Berlian MH, Sahputra TER, Ardi BJW, Dzatmika LW, Besari ARA, Sudibyo RW, Sukaridhoto S (2016) Design and implementation of smart environment monitoring and analytics in real-time system framework based on internet of underwater things and big data. In: 2016 international electronics symposium (IES). IEEE, pp 403–408
Millman (2017) The internet of things: the internet of things could help us live underwater [Online]. Available: https://internetofbusiness.com/the-internet-of-things-could-help-us-live-underwater/
Internet of underwater things (2017) The internet of underwater things promises to revolutionize our interaction with the submarine environment. [Online]. Available: https://emag.nauticexpo.com/articlelong/the-internet-of-underwater-things
Funding
This work was funded, in part, by the Ministry of Education and Science of the Russian Federation Grant No. #2.3649.2017/4.6.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ali, M., Jayakody, D.N.K., Chursin, Y.A. et al. Recent Advances and Future Directions on Underwater Wireless Communications. Arch Computat Methods Eng 27, 1379–1412 (2020). https://doi.org/10.1007/s11831-019-09354-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11831-019-09354-8