
Abstract
In signal processing and image reconstruction, the split feasibility problem (SFP) has been now investigated extensively because of its applications. A classical way to solve the SFP is to use Byrne’s CQ-algorithm. However, this method requires the computation of the norm of the bounded linear operator or the matrix norm in a finite-dimensional space. In this work, we aim to propose an iterative scheme for solving the SFP in the framework of Banach spaces. We also introduce a new way to select the step-size which ensures the convergence of the sequences generated by our scheme. We finally provide examples including its numerical experiments to illustrate the convergence behavior. The main results are new and complements many recent results in the literature.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Let E and F be two p-uniformly convex real Banach spaces which are also uniformly smooth. Let C and Q be nonempty, closed and convex subsets of E and F, respectively. Let \(A:E\rightarrow F\) be a bounded linear operator and \(A^{*}:F^{*}\rightarrow E^{*}\) be the adjoint of A which is defined by
The split feasibility problem (SFP) is to find a point \(x\in C\) such that \(Ax\in Q\). We denote by \(\Omega =C\cap A^{-1}(Q)=\{y\in C: Ay\in Q\}\) the solution set of SFP. Then we have that \(\Omega \) is a closed and convex subset of E.
The SFP in finite-dimensional Hilbert spaces was first introduced by Censor and Elfving [15] for modeling inverse problems which arise from phase retrievals, medical image reconstruction and recently in modeling of intensity modulated radiation therapy. The SFP attracts the attention of many authors due to its application in signal processing. Various algorithms and some interesting results have been studied in order to solve it (see, for example [3,4,5, 13, 22, 24,25,26, 33])).
In Hilbert spaces, a classical way to solve the SFP is to employ the CQ-algorithm which was introduced by Byrne [12], which is defined in the following manner:
where the step-size \(\mu _n\in (0,\frac{2}{\Vert A\Vert ^{2}})\) and \(P_C, P_Q\) are the metric projections on C and Q, respectively. We note that this algorithm is found to be a gradient-projection method in convex minimization as a spacial case. It was proved that \(\{x_n\}\) generated by (1.1) converges weakly to a solution of SFP.
However, it is noted that the operator norm \(\Vert A\Vert \) may not be calculated easily in general. To overcome this difficulty, López et al. [22] suggested the following self-adaptive method, which permits step-size \(\mu _n\) being selected self-adaptively in such a way:
where \(\rho _n\in (0,4)\), \(f(x_n)=\frac{1}{2}\Vert (I-P_Q)Ax_n\Vert ^{2}\) and \( \nabla f(x_n)=A^{*}(I-P_Q)Ax_n\) for all \(n\ge 1\). It was proved that the sequence \(\{x_n\}\) defined by (1.2) converges weakly to a solution of SFP.
Also, employing the idea of Halpern’s iteration, López et al. [22] proposed the following iteration method:
where u is fixed in C, \(\{\alpha _n\}\subset [0,1]\) and the step-size \(\mu _n\) is chosen as above. It was shown that \(\{x_n\}\) defined by (1.3) converges strongly to a solution of SFP provided \(\lim _{n \rightarrow \infty }\alpha _n=0\) and \(\sum _{n=1}^{\infty }{{{\alpha }_{n}}}=\infty \). Subsequently, there have been many modifications of the CQ-algorithm and the self-adaptive method established in the recent years (see also [37, 38]).
For solving the SFP, in the framework of p-uniformly convex and uniformly smooth real Banach spaces, Schöpfer [29] proposed the following algorithm: \(x_1\in E\) and
where \(\Pi _C\) denotes the Bregman projection and J the duality mapping.Clearly, the above algorithm covers the CQ-algorithm as a special case. It was proved that the sequence \(\{x_n\}\) defined by (1.4) converges weakly to a solution of SFP provided the duality mapping J is weak-to-weak continuous and \(\mu _n\in \Big (0,(\frac{q}{C_q\Vert A\Vert ^{q}})^{\frac{1}{q-1}}\Big )\) where \(\frac{1}{p}+\frac{1}{q}=1\) and \(C_{q}\) is the uniform smoothness coefficient of E . See some modifications in [30, 31].
In this work, motivated by the previous works, we introduce a Halpern-type iteration process and prove its strong convergence of the sequence generated by our scheme for solving the SFP without prior knowledge of the operator norm in the framework of Banach spaces. Numerical experiments are included to illustrate the convergence behavior. Our main results complement the results of López et al. [22] (from Hilbert spaces to Banach spaces) and Schöpfer [29]. Moreover, our results improve many other results in the literature. We note that the obtained results seem to be new in this direction.
2 Preliminaries and lemmas
Let E be a real Banach space with norm \(\Vert \cdot \Vert \), and \(E^*\) denotes the Banach dual of E endowed with the dual norm \(\Vert \cdot \Vert _*\). We write \(\langle x,j \rangle \) for the value of a functional j in \(E^*\) at x in E. As usual, \(x_{\nu }\rightarrow x\) and \(x_{\nu }\rightharpoonup x\) stand for the norm and weak convergence of a net \({\{x_\nu }\}\) to x in E, respectively. The modulus of convexity \(\delta _E : [0,2]\rightarrow [0,1]\) is defined as
E is called uniformly convex if \(\delta _E(\epsilon )>0\) for any \(\epsilon \in (0,2]\) and p-uniformly convex if there is a \(C_p>0\) such that \(\delta _E(\epsilon )\ge C_p\epsilon ^{p}\) for any \(\epsilon \in (0,2]\). The modulus of smoothness \(\rho _E (\tau ) : [0,\infty )\rightarrow [0,\infty )\) is defined by
Then E is called uniformly smooth if \(\lim _{\tau \rightarrow 0}\frac{\rho _E(\tau )}{\tau }=0\) and q-uniformly smooth if there is a \(C_q>0\) such that \(\rho _E(\tau )\le C_q\tau ^{q}\) for any \(\tau >0\). Let \(1<q\le 2\le p\) with \(\frac{1}{p}+\frac{1}{q}=1\). It is known (see, for example, [1, 18]) that E is p-uniformly convex if and only if its dual \(E^{*}\) is q-uniformly smooth. Furthermore, Hilbert spaces, \(L_p(or \ \ l_p)\) spaces, \(1<p<\infty \), and the Sobolev spaces, \(W^p_m\), \(1<p<\infty \), are q-uniformly smooth. Hilbert spaces are uniformly smooth while
A continuous strictly increasing function \(\varphi : \mathbb {R}^{+}\rightarrow \mathbb {R}^{+}\) is said to be a gauge if
The mapping \(J_{\varphi } : E\rightarrow 2^{E^*}\) defined by
is called the duality mapping with gauge \(\varphi \). When \(\varphi (t) = t\), the duality mapping \(J_\varphi = J\) is the normalized duality mapping. In the case \(\varphi (t) = t^{p-1}\) where \(p>1\), the duality mapping \(J_\varphi = J_p\) is called the generalized duality mapping and it is defined by
Example 2.1
Let \(x=(x_{1},x_{2},\ldots )\in \ell _{p}\) \((1<p<\infty )\). Then the generalized duality mapping \(J_{p}\) in \(\ell _{p}\) is given by
Example 2.2
Let \(f\in L_{p}([\alpha ,\beta ])\) \((1<p<\infty )\). Then the generalized duality mapping \(J_{p}\) is given by
For a gauge \(\varphi \), the function \(\Phi : \mathbb {R}^{+}\rightarrow \mathbb {R}^{+}\) defined by
is a continuous convex strictly increasing differentiable function on \(\mathbb {R}^{+}\) with \(\Phi ^{'}(t) = \varphi (t)\) and \(\lim _{t\rightarrow +\infty }\Phi (t)/t = +\infty \). When E is uniformly smooth, the duality mapping \(J_{\varphi }\) on E is norm to norm uniformly continuous on bounded subsets of E (see [1, 18]).
We know the following inequality which was proved by Xu [34].
Lemma 2.3
[34] Let \(x, y \in E\). If E is q-uniformly smooth, then there exists \(C_q>0\) such that
Let C be a nonempty, closed and convex subset of E. The metric projection \(P_{C} : E\rightarrow C\) is defined by
It has been employed successfully in optimization, optimal control, approximation theory, and fixed point theory. In the framework of Hilbert spaces, the metric projection \(P_C\) is nonexpansive (i.e., \(\Vert P_{C}x-P_{C}y\Vert \le \Vert x-y\Vert \) for all x, y in H). However, we note that this is no longer true in the framework of Banach spaces. Let E be a smooth, strictly convex and reflexive Banach space. Let C be a nonempty, closed and convex subset of E, and let \(x\in E\) and \(z\in C\). Then \(z = P_{C}x\) if and only if \( \langle z-y, J(x-z)\rangle \ge 0\) for all \(y\in C\); see [32].
We next recall the definition of Bregman distance studied in [6]. Let E be a real smooth Banach space. The Bregman distance \(D_{\varphi }(x,y)\) between x and y in E is defined by
We note that \(D_{\varphi }(x,y) \ge 0\) and \(D_{\varphi }(x,y)=0\) if and only if \(x=y\) (see [21]). It is easily seen by definition that
and
for all \(x,y,z\in E\). In the case \(\varphi (t) = t^{p-1}\) where \(p>1\), the distance \(D_{\varphi }= D_{p}\) is called the p-Lyapunov functional studied in [7] and it is given by
where \(\frac{1}{p}+\frac{1}{q}=1\). Note that
is the Lyapunov functional. See [8, 9, 16]. Let E be a strictly convex, smooth and reflexive Banach space. Following [2], we make use of the function \(V_p : E\times E^{*} \rightarrow [0,+\infty )\), which is defined by
where \(\frac{1}{p}+\frac{1}{q}=1\). Then \(V_p\) is nonnegative and
for all \(x\in E\) and \(\bar{x}\in E^{*}\). For a proper, lower semicontinuous and convex function \(f:E\rightarrow (-\infty ,\infty ]\), the subdifferential \(\partial f\) of f at \(x\in E\) is defined by
We see that, for each \(x\in E\), the mapping g defined by \(g(\bar{x})=V_{p}(x,\bar{x})\) for all \(\bar{x}\in E^*\) is a continuous and convex function from \(E^*\) into \(\mathbb {R}\). So, by the subdifferential of g, we obtain the following inequality:
for all \(x\in E\) and \(\bar{x},\bar{y}\in E^*\) (see also [20]). Indeed, we have
for all \(\bar{x}\in E^*\). So we obtain
for all \(x\in E\) and \(\bar{x},\bar{y}\in E^*\) which consequently implies (2.4).
Proposition 2.4
[10, 21] Let E be a smooth and uniformly convex Banach space. Let \({\{x_n}\}\) and \({\{y_n}\}\) be two sequences in E such that \(D_{\varphi }(x_n,y_n)\rightarrow 0\). If \({\{y_n}\}\) is bounded, then \(\Vert x_n-y_n\Vert \rightarrow 0.\)
Proposition 2.5
[11, 21] Let C be a nonempty, closed and convex subset of a reflexive, strictly convex and smooth Banach space E. Let \(x\in E\). Then there exists a unique element \(x_0\) in C such that
In this case, we denote the generalized projection from E onto C by \(\Pi _{C}^{\varphi }(x)=x_0\). When \(\varphi (t)=t\), we have \(\Pi _{C}^{\varphi }\) coincides with the generalized projection studied in [2]. Let \(p>1\) and \(\varphi (t)=t^{p-1}\). Then \(\Pi _{C}^{\varphi }\) becomes the generalized projection with respect to p and is also denoted by \(\Pi _C\).
We also know the following results.
Proposition 2.6
[21] Let C be a nonempty, closed and convex subset of a reflexive, strictly convex and smooth Banach space E. Let \(x_0 \in C\) and \(x \in E\). Then the following assertions are equivalent:
-
(a)
\(x_0 = \Pi _{C}^{\varphi }(x)\);
-
(b)
\(\langle z-x_0 , J_{\varphi }(x_0) - J_{\varphi }(x)\rangle \ge 0, \ \forall z \in C\).
Moreover, we have
We also need the following tools in analysis which will be used in the sequel.
Lemma 2.7
[23] Let \(\{s_n\}\) be a sequence of real numbers that does not decrease at infinity in the sense that there exists a subsequence \({\{s_{n_i}}\}\) of \({\{s_n}\}\) which satisfies \(s_{n_i} < s_{{n_i}+1}\) for all \(i\in \mathbb {N}\). Define the sequence \({\{\tau (n)}\}_{n\ge n_0}\) of integers as follows:
where \(n_{0}\in \mathbb {N}\) such that \({\{k\le n_{0} : s_{k}<s_{k+1}}\}\ne \emptyset \). Then, the following hold:
-
(i)
\(\tau (n_0)\le \tau (n_{0}+1)\le \cdots \) and \(\tau (n)\rightarrow \infty \);
-
(ii)
\(s_{\tau (n)}\le s_{\tau (n)+1}\) and \(s_n\le s_{\tau (n)+1}\), \(\forall n\ge n_0\).
Lemma 2.8
[35] Let \(\{a_n\}\) be a sequence of nonnegative real numbers satisfying the following relation:
where (i) \(\{\alpha _n\}\subset [0,1]\), \(\sum _{n=1}^{\infty }\alpha _n=\infty \); (ii) \(\limsup _{n\rightarrow \infty }\sigma _n\le 0\); (iii) \(\gamma _n\ge 0\), \(\sum _{n=1}^{\infty }\gamma _n<\infty \). Then, \(a_n\rightarrow 0\) as \(n\rightarrow \infty \).
3 Main results
In this section, we prove strong convergence of the sequence generated by our scheme for solving the split feasibility problem in Banach spaces. Throughout this paper, let \(1<q\le 2\le p<\infty \) and \(\frac{1}{p}+\frac{1}{q}=1\) and denote by \(J_{X}^{p}\) and \(J_{X^*}^{q}\) the duality mappings of a smooth Banach space X and its dual space, respectively.
Employing the method of proof given by Xu in [36], we prove the following fixed point formulation of SFP in a reflexive, strictly convex and smooth Banach space.
Lemma 3.1
Let E and F be two reflexive, strictly convex and smooth Banach spaces. Let C and Q be nonempty, closed and convex subsets of E and F, respectively. Let \(A:E\rightarrow F\) be a bounded linear operator and \(A^*:F^*\rightarrow E^*\) be the adjoint of A. Let \(x^* \in E\). Then \(x^*\) solves the SFP (i.e., \(x^* \in C\cap A^{-1}(Q)\)) if and only if \(x^*\) solves the fixed point equation
Proof
Suppose \(x^*\) solves the SFP. We show that \(x^*\) solves (3.1). Now, \(x^*\) solves SFP implies that \(x^* \in C\) and \(Ax^* \in Q\). Therefore,
Thus,
and this implies
So
Hence,
Therefore, \(x^*\) solves (3.1).
Conversely, assume that \(x^*\) solves the fixed point equation (3.1). We next show that \(x^* \in C,~~Ax^* \in Q.\) Now, if
then by Proposition 2.6 (b) we have
That is,
Hence,
On the other hand, we have from the characterization of metric projection \(P_Q\) that
Adding up (3.2) and (3.3), we obtain
Putting \(z=x^* \in C\) and \(v=P_Q(Ax^*) \in Q\) gives us \(Ax^*=P_Q(Ax^*) \in Q\). This completes the proof. \(\square \)
Remark 3.2
Our Lemma 3.1 extends the fixed point equivalence of SFP given by Xu in [36] from real Hilbert spaces to reflexive, strictly convex and smooth Banach spaces. This fixed point formulation of SFP allows us to construct a fixed point iteration method to solve the SFP in Banach spaces and this iterative method is given below in (3.4).
Theorem 3.3
Let E be a p-uniformly convex and uniformly smooth Banach space and F a reflexive, strictly convex and smooth Banach space. Let C and Q be nonempty, closed and convex subsets of E and F, respectively. Let \(A:E\rightarrow F\) be a bounded linear operator and \(A^*:F^*\rightarrow E^*\) be the adjoint of A. Suppose that \(\Omega =C\cap A^{-1}(Q)\ne \emptyset \). Define a sequence \(\{x_n\}\) by \(u, x_1\in E\) and
where \(f(x_n)=\frac{1}{p}\Vert (I-P_Q)Ax_n\Vert ^{p}\). If \(\alpha _n\rightarrow 0\), \(\sum _{n=1}^{\infty }\alpha _n=\infty \) and \(\{\rho _n\}\subset (0,\infty )\) satisfies
then \(x_n\rightarrow \Pi _\Omega u\).
Proof
We note that \(\nabla f(x)=A^{*}{J^{p}_{F}}(I-P_Q)Ax\) for all \(x\in E\) (see Proposition 5.7 in [19]). Set
for all \(n\in \mathbb {N}\). We see that \((p-1)q=p\). Then, by Lemma 2.3, we have
From Proposition 2.6 and (3.6), it follows that, for each \(x^*\in \Omega \),
On the other hand, we see that
Using (3.7) and (3.8), we obtain
which implies, by (3.5)
Hence, by induction, \(\{D_p(x^{*},x_n)\}\) is bounded. So we can conclude that \(\{x_n\}\) is bounded. Set \(v_{n}={J^{q}_{{E}^{*}}}\Big [\alpha _n{J^{p}_{E}}(u)+(1-\alpha _n)\Big ({J^{p}_{E}}(x_n)-\rho _n\frac{f^{p-1}(x_n)}{\Vert \nabla f(x_n)\Vert ^{p}}\nabla f(x_n)\Big )\Big ]\) for all \(n\in \mathbb {N}\). Using Proposition 2.6 and (2.4), we next consider the following estimation:
Let \(s_n=D_p(\Pi _\Omega u,x_n)\) for all \(n\in \mathbb {N}\). Then, by (3.9), we have
Case 1 If \(\{s_n\}\) is decreasing, then \((1-\alpha _n)\rho _n\big (\frac{{C_q}{\rho ^{q-1}_{n}}}{q}-p\big )\frac{f^{p}(x_n)}{\Vert \nabla f(x_n)\Vert ^{p}}\rightarrow 0\) and \(D_p(v_n,\Pi _Cv_n)\rightarrow 0.\) It follows that \(f(x_n)\rightarrow 0\) by (3.5). Hence \(\Vert Ax_n-P_QAx_n\Vert \rightarrow 0\) and \(\Vert v_n-\Pi _Cv_n\Vert \rightarrow 0\) by Lemma 2.4. We also see that
Since \(J^{q}_{E^*}\) is norm to norm uniformly continuous on bounded subsets of \(E^*\), \(\Vert v_n-x_n\Vert \rightarrow 0\) as \(n\rightarrow \infty \). Since \(\{v_n\}\) is bounded, there exists a subsequence \(\{v_{n_i}\}\) of \(\{v_n\}\) such that \(v_{n_i}\rightharpoonup z\) in \(\omega _w(v_n)\). Also, we have a subsequence \(\{x_{n_i}\}\) of \(\{x_n\}\) such that \(x_{n_i}\rightharpoonup z\in \omega _w(x_n).\) From (2.2) we obtain
It follows that \(z\in C\). Since \(x_{n_i}\rightharpoonup z\), \(Ax_{n_i}\rightharpoonup Az\) and \(\Vert Ax_{n_i}-P_QAx_{n_i}\Vert \rightarrow 0\) as \(i\rightarrow \infty \), we have
as \(i\rightarrow \infty \). Then we obtain \(Az\in Q\) and therefore \(z\in \Omega =C\cap A^{-1}Q\). We next show that
To this end, we choose a subsequence \(\{v_{n_i}\}\) of \(\{v_n\}\) such that
Since \(v_{n_i}\rightharpoonup z\in \Omega \), it follows that
Using Lemma 2.8, we conclude that \(s_n\rightarrow 0\), that is, \(D_p(\Pi _\Omega u,x_n)\rightarrow 0\) as \(n\rightarrow \infty \). So, by Lemma 2.4, we obtain \(x_n\rightarrow \Pi _\Omega u\) as \(n\rightarrow \infty \).
Case 2 Assume that \(\{s_n\}\) is not monotonically decreasing and let \(\tau :\mathbb {N}\rightarrow \mathbb {N}\) be a mapping for all \(n\ge n_0\) (for some \(n_0\) large enough) by
Clearly, \(\tau (n)\) is a nondecreasing sequence such that \(\tau (n)\rightarrow \infty \) as \(n\rightarrow \infty \) and \(0\le s_{\tau (n)}\le s_{\tau (n)+1}, \forall n\ge n_0\). So from (3.10) we can show that \(\Vert Ax_{\tau (n)}-P_QAx_{\tau (n)}\Vert \rightarrow 0\) and \(\Vert v_{\tau (n)}-\Pi _Cv_{\tau (n)}\Vert \rightarrow 0\) as \(n\rightarrow \infty \). By the similar argument as above in Case 1, we can also show that \(\Vert v_{\tau (n)}-x_{\tau (n)}\Vert \rightarrow 0\) as \(n\rightarrow \infty \) and
Also, from (3.10), we see that
It follows that \(\underset{n\rightarrow \infty }{\limsup }s_{\tau (n)}\le 0\) and thus \(\underset{n\rightarrow \infty }{\lim }s_{\tau (n)}=0\). We next show that \(\underset{n\rightarrow \infty }{\lim }s_{\tau (n)+1}=0\). To show this, it suffices to prove that \(\Vert x_{\tau (n)+1}-x_{\tau (n)}\Vert \rightarrow 0\) as \(n\rightarrow \infty \). Indeed, we observe that
From (2.1), it follows that
Hence
Thus, by Lemma 2.7, we obtain \(s_n\le s_{\tau (n)+1}\), which implies that \(\lim _{n\rightarrow \infty } s_n=0\). This shows that \(x_n\rightarrow \Pi _\Omega u\) as \(n\rightarrow \infty \). We thus complete the proof. \(\square \)
We consequently obtain the following result in Hilbert spaces which was studied by Yao et al. [37].
Theorem 3.4
(Yao et al. [37]) Let \(H_1\) and \(H_2\) be Hilbert spaces. Let C and Q be nonempty, closed and convex subsets of \(H_1\) and \(H_2\), respectively. Let \(A:H_1\rightarrow H_2\) be a bounded linear operator and \(A^*:H_2\rightarrow H_1\) be the adjoint of A. Suppose that \(\Omega =C\cap A^{-1}(Q)\ne \emptyset \). Define a sequence \(\{x_n\}\) by \(u, x_1\in H_1\) and
where \(f(x_n)=\frac{1}{2}\Vert (I-P_Q)Ax_n\Vert ^{2}\). If \(\alpha _n\rightarrow 0\), \(\sum _{n=1}^{\infty }\alpha _n=\infty \) and \(\{\rho _n\}\subset (0,\infty )\) satisfies
then \(x_n\rightarrow P_\Omega u\).
4 Applications
In this section, we apply our result on SFP to split equality problem (SEP) introduced by Moudafi [27, 28] in p-uniformly convex real Banach spaces which are also uniformly smooth. As far as we know, this is the first time SEP is being studied in higher Banach spaces outside real Hilbert spaces which has been studied by numerous authors in the literature.
Our interest here is to convert an SEP to SFP in p-uniformly convex real Banach spaces which are also uniformly smooth. To do this, we need the following important lemma.
Lemma 4.1
-
(i)
A real Banach space X is p-uniformly convex if and only if there exists \(c_{1}>0\) such that
$$\begin{aligned} \Vert x+y\Vert ^{p}\ge \Vert x\Vert ^{p}+p\langle y,J^p_{X}(x)\rangle +c_{1}\Vert y\Vert ^{p},\quad \forall x,y\in X. \end{aligned}$$ -
(ii)
A real Banach space X is uniformly smooth if and only if there exists a continuous, strictly increasing and convex function
$$\begin{aligned} g:\mathbb {R}^+ \rightarrow \mathbb {R}^+, g(0)=0 \end{aligned}$$
such that for all \(x, y \in B_r:=\{x \in X:\Vert x\Vert \le r\}\), we have
We now give the following lemma which is an analogue of Lemma 4.1 in product spaces. Furthermore, this lemma will be crucial in our application.
Lemma 4.2
For \(p>1\), let X and Y be real p-uniformly convex Banach spaces which are also uniformly smooth. Let \(E = X\times Y\) with norm
for every arbitrarily \(z = (u,v)\in E\). Let \(E^{*} = X^{*}\times Y^{*}\) denote the dual space of E. For each \(x = (x_{1},x_{2})\in E\), define the mapping \(J^{p}_{E} : E \rightarrow E^*\) by
and for arbitrarily \(z_{1} = (u_{1},v_{1})\), \(z_{2} = (u_{2},v_{2})\) in E, the duality pair \(\langle \cdot ,\cdot \rangle \) is given by
Then we have
-
(a)
\(J^{p}_{E}\) is a duality mapping on E;
-
(b)
E is p-uniformly convex real Banach space which is also uniformly smooth.
Proof
(a) Observe that \(J^{p}_{E}\) is single-valued if and only if E is smooth. For arbitrarily \(x = (x_{1},x_{2})\in E\), let \(J^{p}_{E}(x) = J^{p}_{E}(x_{1},x_{2}) = \psi _{p}\). Then \(\psi _{p} = (J^{p}_{X}(x_1),J^{p}_{Y}(x_2))\in E^*\). Observe that for \(q>1\) with \(\frac{1}{p}+\frac{1}{q} = 1\),
Hence \(\Vert \psi _{p}\Vert _{E^*} = \Vert x\Vert ^{p-1}_{E} \). Also, we have
Hence \(J^{p}_{E}\) is a single-valued normalized duality mapping on E.
(b) Let \(x = (x_{1},x_{2}),y = (y_{1},y_{2})\in E\). Then
for some \(c>0\). Hence
Therefore, E is p-uniformly convex from Lemma 4.1 (i) . We next show that E is uniformly smooth. Now,
where \(g_1, g_2\) are strictly increasing continuous and convex functions on \(\mathbb {R}^+\) and \(g_1(0)=g_2(0) =0\). Therefore,
where \(g(\Vert x-y\Vert ) = g_1(\Vert x_1-y_1\Vert )+g_2(\Vert x_2-y_2\Vert )\). Hence the result follows from Lemma 4.1 (ii) that E is uniformly smooth. \(\square \)
Let \(E_{1},E_{2}\) and \(E_{3}\) be real p-uniformly convex which are also uniformly smooth Banach spaces. Suppose \(C_{1}\subseteq E_{1}\) and \(Q_{1}\subseteq E_{2}\) are nonempty closed and convex sets. Let \(A : E_{1}\rightarrow E_{2}\) and \(B : E_{2}\rightarrow E_{3}\) be bounded linear operators. The split equality problem (SEP) [27, 28] is defined by
Our interest here is to transform (4.1) into the SFP. Now suppose \(E = E_{1}\times E_{2}\), \(F = E_{3}\times E_{3}\), \(C = C_{1}\times Q_{1} \subset E\) and \(Q = \{(z,w)\in F : z = w\}\). We know from Lemma 4.2 that E and F are p-uniformly convex real Banach spaces which are also uniformly smooth.
Define an operator \(T : E\rightarrow F\) by
for all \((x,y)\in E\). Since if \(z_{1} = (x_{1},y_{1}), z_{2} = (x_{2},y_{2})\), then
which shows that T is linear. Also, it is easy to see that T is bounded from the boundedness of A and B. Set \(S = \{(x,y)\in C : T(x,y)\in Q\}\). Hence \((x,y)\in E\) solves (4.1) (using Lemma 3.1) if and only if
where
and
Using the fixed point formulation (4.2), we construct an iterative method for solving SEP (4.1) and obtain the following convergence theorem for solving SEP (4.1) by applying the result of Theorem 3.3.
Theorem 4.3
Let \(E_{1}\) and \(E_{2}\) be two real p-uniformly convex which are also uniformly smooth Banach spaces and \(E_{3}\) a reflexive, strictly convex andsmooth Banach space. Suppose \(C_{1}\subseteq E_{1}\) and \(Q_{1}\subseteq E_{2}\) are nonempty closed and convex sets. Let \(A : E_{1}\rightarrow E_{3}\) and \(B : E_{2}\rightarrow E_{3}\) be bounded linear operators. Let \(A^*:E_3^*\rightarrow E_1^*\) and \(B^*:E_3^*\rightarrow E_2^*\) be the adjoints of A and B respectively. Suppose that \(\Omega \) denotes the set of solutions of SEP (4.1) and \(\Omega \ne \emptyset \). Define a sequence \(\{(x_n,y_n)\}\) by \(x_1,y_1\in E_1\) and
If \(\alpha _n\rightarrow 0\), \(\sum _{n=1}^{\infty }\alpha _n=\infty \) and \(\{\rho _n\}\subset (0,\infty )\) satisfies \(\underset{n}{\inf }{\rho _n}\Big (pq-C_q{\rho ^{q-1}_{n}}\Big )>0,\) then \(\{(x_n,y_n)\}\) converges strongly to \((x^*,y^*)\) which simultaneously solves SEP (4.1) and is the nearest point to the initial guess \((x_1,y_1)\).
5 Examples and numerical results
In this section, we present some numerical examples to illustrate the performance of our algorithm. All codes were written in Matlab 2012b and run on Hp \(i-5\) Dual-Core 8.00 GB (7.78 GB usable) RAM laptop.
Example 5.1
We consider the problem in \((L_2([\alpha ,\beta ]),||\cdot ||_{L_2})\) and also give numerical examples using Theorem 3.3. Now take
where \(0\ne a \in L_2([\alpha ,\beta ])\) and \(b\in \mathbb {R}\), then (see [14])
Let
be a closed ball centered at \(d\in L_2([\alpha ,\beta ])\) with radius \(r > 0\), then
Define an operator \(A:L_2([0,2\pi ])\rightarrow L_2([0,2\pi ])\) by \(Ax(t)=\frac{x(t)}{2},~~t \in [0,2\pi ]\) for all \(x\in L_2([0,2\pi ])\). Then it can be easily verified that A is continuous and bounded linear operator.
Now, suppose
and
Let us consider the following problem:
Observe that the set of solutions of problem (5.1) is nonempty (since \(x(t)=0,~~a.e.\) is in the set of solutions). Take \(\alpha _n=\frac{1}{n+1},~~\forall n \ge 1\), then our iterative scheme (3.4) becomes
where \(f(x_n)=\frac{1}{2}\Vert Ax_n-P_QAx_{n}\Vert ^{2}\) for all \(n\in \mathbb {N}\).
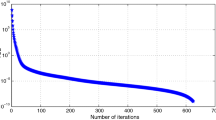
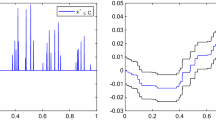
We now study the effect (in terms of convergence, stability, number of iterations required and the cpu time) of the sequence \(\{\rho _n\}\subset (0,\infty )\) on the iterative scheme by choosing different \(\rho _n\) such that \(\underset{n}{\inf }{\rho _n}(4-\rho _{n})>0\) in the following cases (Figs. 1, 2, 3, 4; Table 1).

Different cases with Choice 1

Different cases with Choice 2

Different cases with Choice 3

Different cases with Choice 4
-
Case 1: \(\rho _n=\frac{n}{4n+1}\);
-
Case 2: \(\rho _n=\frac{n}{2n+1}\);
-
Case 3: \(\rho _n=\frac{n}{n+1}\);
-
Case 4: \(\rho _n=\frac{2n}{n+1}\);
-
Case 5: \(\rho _n=\frac{3n}{n+1}\).
For each case mentioned above, using stopping criterion \(\frac{||x_{n+1}-x_n||}{||x_2-x_1||}<10^{-4}\), we also consider different choices of \(x_1\) and u as
-
Choice 1: \(x_1=2tcos(3t)e^{3t}\) and \(3(t^7-1)e^{-5t}\);
-
Choice 2: \(x_1=2tsin(3t)e^{2t}\) and \(t^2sin(5\pi t)\);
-
Choice 3: \(x_1=3t^2e^{4t-1}\) and \(t^3-t^2+4t+1\);
-
Choice 4: \(x_1=2t^3e^{5t}\) and \(t^4+3t^2+5\).
Remark 5.2
We make the following observations from the numerical results presented above.
-
1.
The numerical results from different Cases and different Choices show that our proposed Algorithm (5.2) is fast, stable, efficient, easy to implement and required small number of iterations.
-
2.
We have that the number of iterations and the cpu run time are decreasing starting from Case 1 to Case 5. However, there is no significant difference in both cpu run time and number of iterations for different Choices of \(x_1\) and u. So, initial guess does not have any significant effect on the convergence of the algorithm.
References
Agarwal, R.P., O’Regan, D., Sahu, D.R.: Fixed Point Theory for Lipschitzian-type Mappings with Applications, Topological Fixed Point Theory and Its Applications, vol. 6. Springer, New York (2009)
Alber, Y.I.: Metric and generalized projections in Banach spaces: properties and applications. In: Kartsatos, A.G. (ed.) Theory and Applications of Nonlinear Operators of Accretive and Monotone Type, pp. 15–20. Dekker, New York (1996)
Alber, Y.I., Butnariu, D.: Convergence of Bregman projection methods for solving consistent convex feasibility problems in reflexive Banach spaces. J. Optim. Theory Appl. 92, 33–61 (1997)
Aleyner, A., Reich, S.: Block-iterative algorithms for solving convex feasibility problems in Hilbert and in Banach spaces. J. Math. Anal. Appl. 343, 427–435 (2008)
Alsulami, S.M., Takahashi, W.: Iterative methods for the split feasibility problem in Banach spaces. J. Convex Anal. 16, 585–596 (2015)
Bauschke, H.H., Borwein, J.M., Combettes, P.L.: Bregman monotone optimization algorithms. SIAM J. Control Optim. 42, 596–636 (2003)
Bonesky, T., Kazimierski, K.S., Maass, P., Schöpfer, F., Schuster, T.: Minimization of Tikhonov functionals in Banach spaces. Abstr. Appl. Anal. 2008, 192679 (2008)
Brègman, L.M.: A relaxation method of finding a common point of convex sets and its applications to the solution of problems in convex programming. USSR Comput. Math. Math. Phys. 7, 200–217 (1967)
Butnariu, D., Iusem, A.N.: Totally Convex Functions for Fixed Points Computation and Infinite Dimensional Optimization, vol. 40. Kluwer, Dordrecht (2000)
Butnariu, D., Iusem, A.N., Resmerita, E.: Total convexity for powers of the norm in uniformly convex Banach spaces. J. Convex Anal. 7, 319–334 (2000)
Butnariu, D., Kassay, G.: A proximal-projection method for finding zeros of set-valued operators. SIAM J. Control Optim. 47, 2096–2136 (2008)
Byrne, C.: Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 18, 441–453 (2002)
Byrne, C., Censor, Y., Gibali, A., Reich, S.: The split common null point problem. J. Nonlinear Convex Anal. 13, 759–775 (2012)
Cegielski, A.: Iterative Methods for Fixed Point Problems in Hilbert Spaces. Lecture Notes in Mathematics, vol. 2057. Springer, Berlin, ISBN 978-3-642-30900-7 (2012)
Censor, Y., Elfving, T.: A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms 8, 221–239 (1994)
Censor, Y., Lent, A.: An iterative row-action method for interval convex programming. J. Optim. Theory Appl. 34, 321–353 (1981)
Chidume, C.E.: Geometric properties of Banach spaces and nonlinear iterations. Lecture Notes in Mathematics, vol. 1965, XVII. Springer, Berlin, ISBN 978-1-84882-189-7 (2009)
Cioranescu, I.: Geometry of Banach spaces, Duality Mappings and Nonlinear Problems, vol. 62. Kluwer, Dordrecht (1990)
Ekeland, I., Temam, R.: Convex Analysis and Variational Problems. North-Holland, Amsterdam (1976)
Kohsaka, F., Takahashi, W.: Proximal point algorithms with Bregman functions in Banach spaces. J. Nonlinear Convex Anal. 6, 505–523 (2005)
Kuo, L.-W., Sahu, D.R.: Bregman distance and strong convergence of proximal-type algorithms. Abstr. Appl. Anal. 2013, 590519 (2013)
López, G., Martin-Márquez, V., Wang, F., Xu, H.K.: Solving the split feasibility problem without prior knowledge of matrix norms. Inverse Probl. 28, 085004 (2012)
Maingé, P.E.: Strong convergence of projected subgradient methods for nonsmooth and nonstrictly convex minimization. Set-Valued Anal. 16, 899–912 (2008)
Masad, E., Reich, S.: A note on the multiple-set split convex feasibility problem in Hilbert space. J. Nonlinear Convex Anal. 8, 367–371 (2007)
Moudafi, A.: Split monotone variational inclusions. J. Optim. Theory Appl. 150, 275–283 (2011)
Moudafi, A., Thakur, B.S.: Solving proximal split feasibility problems without prior knowledge of operator norms. Optim. Lett. 8, 2099–2110 (2014)
Moudafi, A.: A relaxed alternating CQ-algorithm for convex feasibility problems. Nonlinear Anal. 79, 117–121 (2013)
Moudafi, A.: Alternating CQ-algorithm for convex feasibility and split fixed-point problems. J. Nonlinear Convex Anal. 15, 809–818 (2014)
Schöpfer, F., Schuster, T., Louis, A.K.: An iterative regularization method for the solution of the split feasibility problem in Banach spaces. Inverse Probl. 24, 055008 (2008)
Shehu, Y.: Iterative methods for split feasibility problems in certain Banach spaces. J. Nonlinear Convex Anal. 16, 2315–2364 (2015)
Shehu, Y., Iyiola, O.S., Enyi, C.D.: An iterative algorithm for solving split feasibility problems and fixed point problems in Banach spaces. Numer. Algorithms 72, 835–864 (2016)
Takahashi, W.: Nonlinear Functional Analysis. Yokohama Publishers, Yokohama (2000)
Wang, F.: A new algorithm for solving the multiple-sets split feasibility problem in certain Banach spaces. Numer. Funct. Anal. Optim. 35, 99–110 (2014)
Xu, H.K.: Inequalities in Banach spaces with applications. Nonlinear Anal. 16, 1127–1138 (1991)
Xu, H.K.: Another control conditions in an iterative method for nonexpansive mappings. Bull. Aust. Math. Soc. 65, 109–113 (2002)
Xu, H.K.: Iterative methods for the split feasibility problem in infinite-dimensional Hilbert spaces. Inverse Probl. 26, 105018 (2010)
Yao, Y., Postolache, M., Liou, Y.C.: Strong convergence of a self-adaptive method for the split feasibility problem. Fixed Point Theory Appl. 2013 (2013). https://doi.org/10.1186/1687-1812-2013-201
Zhou, H., Wang, P.: Some remarks on the paper “Strong convergence of a self-adaptive method for the split feasibility problem”. Numer. Algorithms 70, 333–339 (2015)
Acknowledgements
This research was supported by the Thailand Research Fund and the Commission on Higher Education under Grant MRG5980248. S. Suantai would like to thank Chiang Mai University. The research was carried out when the second author was an Alexander von Humboldt Postdoctoral Fellow at the Institute of Mathematics, University of Wurzburg, Germany. He is grateful to the Alexander von Humboldt Foundation, Bonn, for the fellowship and the Institute of Mathematics, Julius Maximilian University of Wurzburg, Germany, for the hospitality and facilities.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Suantai, S., Shehu, Y., Cholamjiak, P. et al. Strong convergence of a self-adaptive method for the split feasibility problem in Banach spaces. J. Fixed Point Theory Appl. 20, 68 (2018). https://doi.org/10.1007/s11784-018-0549-y
Published:
DOI: https://doi.org/10.1007/s11784-018-0549-y