
Abstract
A small polygon is a polygon of unit diameter. The maximal area of a small polygon with \(n=2m\) vertices is not known when \(m\ge 7\). Finding the largest small n-gon for a given number \(n\ge 3\) can be formulated as a nonconvex quadratically constrained quadratic optimization problem. We propose to solve this problem with a sequential convex optimization approach, which is an ascent algorithm guaranteeing convergence to a locally optimal solution. Numerical experiments on polygons with up to \(n=128\) sides suggest that optimal solutions obtained are near-global. Indeed, for even \(6 \le n \le 12\), the algorithm proposed in this work converges to known global optimal solutions found in the literature.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The diameter of a polygon is the largest Euclidean distance between pairs of its vertices. A polygon is said to be small if its diameter equals one. For a given integer \(n \ge 3\), the maximal area problem consists in finding a small n-gon with the largest area. The problem was first investigated by Reinhardt [16] in 1922. He proved that
-
when n is odd, the regular small n-gon is the unique optimal solution;
-
when \(n=4\), there are infinitely many optimal solutions, including the small square;
-
when \(n \ge 6\) is even, the regular small n-gon is not optimal.
When \(n \ge 6\) is even, the maximal area problem is solved for \(n \le 12\). In 1961, Bieri [5] found the largest small 6-gon, assuming the existence of an axis of symmetry. In 1975, Graham [9] independently constructed the same 6-gon, represented in Fig. 2c. In 2002, Audet et al. [3] combined Graham’s strategy with global optimization methods to find the largest small 8-gon, illustrated in Fig. 3c. In 2013, Henrion and Messine [10] found the largest small 10- and 12-gons by also solving globally a nonconvex quadratically constrained quadratic optimization problem. They also found the largest small axially symmetrical 14- and 16-gons. In 2017, Audet [1] showed that the regular small polygon has the maximal area among all equilateral small polygons. In 2021, Audet et al. [4] determined analytically the largest small axially symmetrical 8-gon.
The diameter graph of a small polygon is the graph with the vertices of the polygon, and an edge between two vertices exists only if the distance between these vertices equals one. Graham [9] conjectured that, for even \(n \ge 6\), the diameter graph of a small n-gon with maximal area has a cycle of length \(n-1\) and one additional edge from the remaining vertex. The case \(n=6\) was proven by Graham himself [9] and the case \(n=8\) by Audet et al. [3]. In 2007, Foster and Szabo [8] proved Graham’s conjecture for all even \(n \ge 6\). Figures 1, 2, and 3 show diameter graphs of some small polygons. The solid lines illustrate pairs of vertices which are unit distance apart.
In addition to exact results and bounds, uncertified largest small polygons have been obtained both by metaheurisitics and nonlinear optimization. Assuming Graham’s conjecture and the existence of an axis of symmetry, Mossinghoff [13] in 2006 constructed large small n-gons for even \(6 \le n \le 20\). In 2020, using a formulation based on polar coordinates, Pintér [14] presented numerical solutions estimates of the maximal area for even \(6 \le n \le 80\). The polar coordinates-based formulation was recently used by Pintér et al. [15] to obtain estimates of the maximal area for even \(6\le {n} \le 1000\).
The maximal area problem can be formulated as a nonconvex quadratically constrained quadratic optimization problem. In this work, we propose to solve it with a sequential convex optimization approach, also known as the concave-convex procedure [11, 12]. This approach is an ascent algorithm guaranteeing convergence to a locally optimal solution. Numerical experiments on polygons with up to \(n=128\) sides suggest that optimal solutions obtained are near-global. Indeed, without assuming Graham’s conjecture nor the existence of an axis of symmetry in our quadratic formulation, optimal n-gons obtained with the algorithm proposed in this work verify both conditions within the limit of numerical computations. Moreover, for even \(6 \le n \le 12\), this algorithm converges to known global optimal solutions. The algorithm is implemented as a MATLAB-based package, OPTIGON, which is available on GitHub [6]. Using the algorithm in MATLAB requires that CVX [7] be installed.
The remainder of this paper is organized as follows. In Sect. 2, we recall principal results on largest small polygons. Section 3 presents the quadratic formulation of the maximal area problem and the sequential convex optimization approach to solve it. We report in Sect. 4 computational results. Section 5 concludes the paper.

Two small 4-gons \(({\mathtt {P}}_4,A({\mathtt {P}}_4))\)

Three small 6-gons \(({\mathtt {P}}_6,A({\mathtt {P}}_6))\)

Three small 8-gons \(({\mathtt {P}}_8,A({\mathtt {P}}_8))\)
2 Largest small polygons
Let \(A({\mathtt {P}})\) denote the area of a polygon \({\mathtt {P}}\). Let \({\mathtt {R}}_n\) denote the regular small n-gon. We have
We remark that \(A({\mathtt {R}}_n) < A({\mathtt {R}}_{n-1})\) for all even \(n\ge 6\) [2]. This suggests that \({\mathtt {R}}_n\) does not have maximum area for any even \(n\ge 6\). Indeed, when n is even, we can construct a small n-gon with a larger area than \({\mathtt {R}}_n\) by adding a vertex at distance 1 along the mediatrix of an angle in \({\mathtt {R}}_{n-1}\). We denote this n-gon by \({\mathtt {R}}_{n-1}^+\) and we have
Theorem 1
(Reinhardt [16]) For all \(n \ge 3\), let \(A_n^*\) denote the maximal area among all small n-gons and let \({\overline{A}}_n := \frac{n}{2}\left( \sin \frac{\pi }{n} - \tan \frac{\pi }{2n}\right)\).
-
When n is odd, \(A_n^* = {\overline{A}}_n\) is only achieved by \({\mathtt {R}}_n\).
-
\(A_4^* = 1/2 < {\overline{A}}_4\) is achieved by infinitely many 4-gons, including \({\mathtt {R}}_4\) and \({\mathtt {R}}_3^+\) illustrated in Figure 1.
-
When \(n\ge 6\) is even, \(A({\mathtt {R}}_n)< A_n^* < {\overline{A}}_n\).
When \(n\ge 6\) is even, the maximal area \(A_n^*\) is known for even \(n \le 12\). Using geometric arguments, Graham [9] determined analytically the largest small 6-gon, represented in Fig. 2c. Its area \(A_6^* \approx 0.674981\) is about \(3.92\%\) larger than \(A({\mathtt {R}}_6) = 3\sqrt{3}/8\). The approach of Graham, combined with methods of global optimization, has been followed by [3] to determine the largest small 8-gon, represented in Fig. 3c. Its area \(A_8^* \approx 0.726868\) is about \(2.79\%\) larger than \(A({\mathtt {R}}_8) = \sqrt{2}/2\). Henrion and Messine [10] found that \(A_{10}^* \approx 0.749137\) and \(A_{12}^* \approx 0.760730\).
For all even \(n\ge 6\), let \({\mathtt {U}}_n\) denote an optimal small n-gon.
Theorem 2
(Graham [9], Foster and Szabo [8]) For even \(n \ge 6\), the diameter graph of \({\mathtt {U}}_n\) has a cycle of length \(n-1\) and one additional edge from the remaining vertex.
Conjecture 1
For even \(n \ge 6\), \({\mathtt {U}}_n\) has an axis of symmetry corresponding to the pending edge in its diameter graph.
From Theorem 2, we note that \({\mathtt {R}}_{n-1}^+\) has the same diameter graph as the largest small n-gon \({\mathtt {U}}_n\). Conjecture 1 is only proven for \(n=6\) and this is due to Yuan [17]. However, the largest small polygons obtained by [3] and [10] are a further evidence that the conjecture may be true.
3 Nonconvex quadratically constrained quadratic optimization
We use cartesian coordinates to describe an n-gon \({\mathtt {P}}_n\), assuming that a vertex \({\mathtt {v}}_i\), \(i=0,1,\ldots ,n-1\), is positioned at abscissa \(x_i\) and ordinate \(y_i\). Placing the vertex \({\mathtt {v}}_0\) at the origin, we set \(x_0 = y_0 = 0\). We also assume that the n-gon \({\mathtt {P}}_n\) is in the half-plane \(y\ge 0\) and the vertices \({\mathtt {v}}_i\), \(i=1,2,\ldots ,n-1\), are arranged in a counterclockwise order as illustrated in Fig. 4, i.e., \(y_{i+1}x_i \ge x_{i+1}y_i\) for all \(i=1,2,\ldots ,n-2\). The maximal area problem can be formulated as follows
At optimality, for all \(i=1,2,\ldots ,n-2\), \(u_i = (y_{i+1}x_i - x_{i+1}y_i)/2\), which corresponds to the area of the triangle \({\mathtt {v}}_0{\mathtt {v}}_i{\mathtt {v}}_{i+1}\). It is important to note that, unlike what was done in [3, 10], this formulation does not make the assumption of Graham’s conjecture, nor of the existence of an axis of symmetry.

Definition of variables: case of \(n=6\) vertices
Problem (1) is a nonconvex quadratically constrained quadratic optimization problem and can be reformulated as a difference-of-convex optimization (DCO) problem of the form
where \(g_0,\ldots ,g_m\) and \(h_0,\ldots ,h_m\) are convex quadratic functions. We note that the feasible set
is compact with a nonempty interior, which implies that \(g_0(\varvec{z}) - h_0(\varvec{z}) < \infty\) for all \(\varvec{z} \in \varOmega\).
For a fixed \(\varvec{c}\), we have
for all \(i=0,1,\ldots ,m\). Then the following problem
is a convex restriction of the DCO problem (2) as stated by Proposition 1. Constraint (1e) is equivalent to
for all \(i=1,2,\ldots ,n-2\). For a fixed \((\varvec{a},\varvec{b}) \in \mathbb {R}^{n-1} \times \mathbb {R}^{n-1}\), if we replace (1e) in (1) by
for all \(i=1,2,\ldots ,n-2\), we obtain a convex restriction of the maximal area problem.
Proposition 1
If \(\varvec{z}\) is a feasible solution of (3) then \(\varvec{z}\) is a feasible solution of (2).
Proof
Let \(\varvec{z}\) be a feasible solution of (3), i.e., \({\underline{g}}_i(\varvec{z};\varvec{c}) - h_i(\varvec{z}) \ge 0\) for all \(i=1,2,\ldots ,m\). Then \(g_i(\varvec{z}) - h_i(\varvec{z}) \ge {\underline{g}}_i(\varvec{z};\varvec{c}) - h_i(\varvec{z}) \ge 0\) for all \(i=1,2,\ldots ,m\). Thus, \(\varvec{z}\) is a feasible solution of (2). \(\square\)
Proposition 2
If \(\varvec{c}\) is a feasible solution of (2) then (3) is a feasible problem. Moreover, if \(\varvec{z}^*\) is an optimal solution of (3) then \(g_0(\varvec{c}) - h_0(\varvec{c}) \le g_0(\varvec{z}^*) - h_0(\varvec{z}^*)\).
Proof
Let \(\varvec{c}\) be a feasible solution of (2), i.e., \(g_i(\varvec{c}) - h_i(\varvec{c}) \ge 0\) for all \(i=1,2,\ldots ,m\). Then there exists \(\varvec{z} = \varvec{c}\) such that \({\underline{g}}_i(\varvec{c};\varvec{c}) - h_i(\varvec{c}) = g_i(\varvec{c}) - h_i(\varvec{c}) \ge 0\) for all \(i=1,2,\ldots ,m\). Thus, (3) is a feasible problem. Moreover, if \(\varvec{z}^*\) is an optimal solution of (3), we have \(g_0(\varvec{c}) - h_0(\varvec{c}) = {\underline{g}}_0(\varvec{c};\varvec{c}) - h_0(\varvec{c}) \le {\underline{g}}_0(\varvec{z}^*;\varvec{c}) - h_0(\varvec{z}^*) \le g_0(\varvec{z}^*) - h_0(\varvec{z}^*)\). \(\square\)
From Proposition 2, the optimal small n-gon \((\varvec{x},\varvec{y})\) obtained by solving a convex restriction of Problem (1) constructed around a small n-gon \((\varvec{a},\varvec{b})\) has a larger area than this one. Proposition 3 states that if \((\varvec{a},\varvec{b})\) is the optimal n-gon of the convex restriction constructed around itself, then it is a local optimal n-gon for the maximal area problem.
Proposition 3
Let \(\varvec{c}\) be a feasible solution of (2). We suppose that \({\underline{\varOmega }}(\varvec{c}) := \{\varvec{z}:{\underline{g}}_i(\varvec{z};\varvec{c}) - h_i(\varvec{z}) \ge 0, i =1,2,\ldots ,m\}\) satisfies Slater condition. If \(\varvec{c}\) is an optimal solution of (3) then \(\varvec{c}\) is a critical point of (2).
Proof
If \(\varvec{c}\) is an optimal solution of (3) then there exist m scalars \(\mu _1, \mu _2,\ldots ,\mu _m\) such that
Since \({\underline{g}}_i (\varvec{c};\varvec{c}) = g_i(\varvec{c})\) and \(\nabla {\underline{g}}_i (\varvec{c};\varvec{c}) = \nabla g_i(\varvec{c})\) for all \(i=0,1,\ldots ,m\), we conclude that \(\varvec{c}\) is a critical point of (2). \(\square\)
We propose to solve the DCO problem (2) with a sequential convex optimization approach given in Algorithm 1, also known as concave-convex procedure. A proof of showing that a sequence \(\{\varvec{z}_k\}_{k=0}^\infty\) generated by Algorithm 1 converges to a critical point \(\varvec{z}^*\) of the original DCO problem (2) can be found in [11, 12].

4 Computational results
Problem (1) was solved in MATLAB using CVX 2.2 with MOSEK 9.1.9 and default precision (tolerance \(\epsilon = 1.49 \times 10^{-8}\)). All the computations were carried out on an Intel(R) Core(TM) i7-3540M CPU @ 3.00 GHz computing platform. Algorithm 1 was implemented as a MATLAB package: OPTIGON, which is freely available on GitHub [6]. Using Algorithm 1 in MATLAB requires that CVX be installed. CVX is a MATLAB-based modeling system for convex optimization, which turns MATLAB into a modeling language, allowing constraints and objectives to be specified using standard MATLAB expression syntax [7].
We chose the following values as initial solution:
which define the n-gon \({\mathtt {R}}_{n-1}^+\), and the stopping criteria \(\varepsilon = 10^{-5}\). At each iteration, we forced MOSEK to solve the dual problem by setting the parameter \({\mathtt {MSK\_IPAR\_INTPNT\_SOLVE\_FORM}}\) to \({\mathtt {MSK\_SOLVE\_DUAL}}\). Table 1 shows the areas of the optimal n-gons \(\hat{\mathtt{P}}_n\) for even numbers \(n=6,8,\ldots ,128\), along with the areas of the initial n-gons \({\mathtt {R}}_{n-1}^+\), the best lower bounds \({{\underline{A}}_n}\) found in the literature, and the upper bounds \({{\overline{A}}_n}\). We also report the number k of iterations of Algotithm 1 for each n. The results in Table 1 support the following keypoints:
-
1.
For \(6 \le n\le 12\), \({\underline{A}}_n - A(\hat{\mathtt{P}}_n) \le 10^{-8}\), i.e., Algorithm 1 converges to the best known optimal solutions found in the literature.
-
2.
For \(32 \le n \le 80\), \({\underline{A}}_n< A({\mathtt {R}}_{n-1}^+) < A(\hat{\mathtt{P}}_n)\), i.e., it appears that the solutions obtained by Pintér [14] are suboptimal.
-
3.
For all n, the solutions \(\hat{\mathtt{P}}_n\) obtained with Algorithm 1 verify, within the limit of the numerical computations, Theorem 2 and Conjecture 1, i.e.,
$$\begin{aligned} \begin{aligned} x_{n/2}&=0,&y_{n/2}&=1,\\ \Vert {\mathtt {v}}_{n/2-1}\Vert&=1,&\Vert {\mathtt {v}}_{n/2+1}\Vert&=1,\\ \Vert {\mathtt {v}}_{i+n/2}-{\mathtt {v}}_i\Vert&=1,&\Vert {\mathtt {v}}_{i+n/2+1}-{\mathtt {v}}_i\Vert&=1&\forall i=1,2,\ldots ,n/2-2,\\ \Vert {\mathtt {v}}_{n-1}-{\mathtt {v}}_{n/2-1}\Vert&=1,\\ x_{n-i}&=-x_i,&y_{n-i}&= y_i&\forall i=1,2,\ldots ,n/2-1. \end{aligned} \end{aligned}$$We illustrate the largest small 16-, 32- and 64-gons in Fig. 5. Furthermore, we remark that Theorem 2 and Conjecture 1 are verified by each polygon of the sequence generated by Algorithm 1. All 6-gons generated by the algorithm are represented in Fig. 6 and the coordinates of their vertices are given in Table 2.

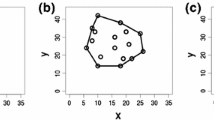
Three largest small n-gons \((\hat{\mathtt{P}}_n,A(\hat{\mathtt{P}}_n))\)

All 6-gons \(({\mathtt {P}}_6^k,A({\mathtt {P}}_6^k))\) generated by Algorithm 1
5 Conclusion
We proposed a sequential convex optimization approach to find the largest small n-gon for a given even number \(n\ge 6\), which is formulated as a nonconvex quadratically constrained quadratic optimization problem. The algorithm, also known as the concave-convex procedure, guarantees convergence to a locally optimal solution.
Without assuming Graham’s conjecture nor the existence of an axis of symmetry in our quadratic formulation, numerical experiments on polygons with up to \(n=128\) sides showed that each optimal n-gon obtained with the algorithm proposed verifies both conditions within the limitation of the numerical computations. Futhermore, for even \(6\le n\le 12\), the n-gons obtained correspond to the known largest small n-gons.
References
Audet, C.: Maximal area of equilateral small polygons. Am. Math. Mon. 124(2), 175–178 (2017). https://doi.org/10.4169/amer.math.monthly.124.2.175
Audet, C., Hansen, P., Messine, F.: Ranking small regular polygons by area and by perimeter. J. Appl. Ind. Math. 3(1), 21–27 (2009). https://doi.org/10.1134/S1990478909010037
Audet, C., Hansen, P., Messine, F., Xiong, J.: The largest small octagon. J. Comb. Theory Ser. A 98(1), 46–59 (2002). https://doi.org/10.1006/jcta.2001.3225
Audet, C., Hansen, P., Svrtan, D.: Using symbolic calculations to determine largest small polygons. J. Global Optim. 81(1), 261–268 (2021). https://doi.org/10.1007/s10898-020-00908-w
Bieri, H.: Ungelöste probleme: Zweiter nachtrag zu nr. 12. Elem. Math 16, 105–106 (1961)
Bingane, C.: OPTIGON: Extremal small polygons. https://github.com/cbingane/optigon (2020)
CVX Research, Inc.: CVX: MATLAB software for disciplined convex programming, version 2.2. http://cvxr.com/cvx (2012)
Foster, J., Szabo, T.: Diameter graphs of polygons and the proof of a conjecture of Graham. J. Combin. Theory Ser. A 114(8), 1515–1525 (2007). https://doi.org/10.1016/j.jcta.2007.02.006
Graham, R.L.: The largest small hexagon. J. Comb. Theory Ser. A 18(2), 165–170 (1975). https://doi.org/10.1016/0097-3165(75)90004-7
Henrion, D., Messine, F.: Finding largest small polygons with GloptiPoly. J. Global Optim. 56(3), 1017–1028 (2013). https://doi.org/10.1007/s10898-011-9818-7
Sriperumbudur, B.K., Lanckriet, G.R.G.: On the convergence of the concave-convex procedure. In: Bengio, Y., Schuurmans, D., Lafferty, J.D., Williams, C.K.I., Culotta, A. (eds.) Advances in Neural Information Processing Systems, vol. 22, pp. 1759–1767. Curran Associates, Inc. (2009)
Marks, B.R., Wright, G.P.: A general inner approximation algorithm for nonconvex mathematical programs. Oper. Res. 26(4), 681–683 (1978). https://doi.org/10.1287/opre.26.4.681
Mossinghoff, M.J.: Isodiametric problems for polygons. Discrete Comput. Geom. 36(2), 363–379 (2006). https://doi.org/10.1007/s00454-006-1238-y
Pintér, J.D.: Largest small \(n\)-polygons: numerical optimum estimates for \(n\ge 6\). In: Al-Baali, M., Purnama, A., Grandinetti, L. (eds.) Numerical Analysis and Optimization, Springer Proceedings in Mathematics & Statistics. vol. 354, pp. 231–247. Springer International Publishing (2020). https://doi.org/10.1007/978-3-030-72040-7_11
Pintér, J.D., Kampas, F.J., Castillo, I.: Finding the conjectured sequence of largest small \(n\)-polygons by numerical optimization. Math. Comput. Appl. 27(3), 1–10 (2022). https://doi.org/10.3390/mca27030042
Reinhardt, K.: Extremale polygone gegebenen durchmessers. Jahresber. Deutsch. Math.-Verein. 31, 251–270 (1922)
Yuan, B.: The Largest Small Hexagon. Master’s thesis, National University of Singapore (2004)
Acknowledgements
The author thanks Charles Audet, Professor at Polytechnique Montréal, for helpful discussions on largest small polygons and helpful comments on early drafts of this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Bingane, C. Largest small polygons: a sequential convex optimization approach. Optim Lett 17, 385–397 (2023). https://doi.org/10.1007/s11590-022-01887-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11590-022-01887-5