
Abstract
Background
The impact of power and signal cable harnesses on the dynamic behavior of lightweight space structures has come into the spotlight in the recent past. The previous analytical modelling efforts in this area have primarily focused on either periodically wrapped beam structures or plate structures of parallel cable wrapping patterns.
Objective
The presented paper aims at experimental validation for an analytical model developed by the authors for cable harnessed plate structures with periodic patterns such as zigzag and diagonal. The work includes an extensive analysis of the vibration behavior of cable-harnessed plates in comparison to their host plates with no cables attached.
Methods
An energy equivalence homogenization technique is developed to model the vibrations behavior of the cable harnessed plates of periodic patterns. Experimental modal analysis is performed on cable-harnessed plates using impact hammer excitation and laser doppler vibrometry. The natural frequencies, mode shapes, and frequency response functions are obtained for comparisons with the model predictions.
Results
The impacts of the harnessing cables on plate dynamics are modeled and compared to the experimental frequency response functions for periodically wrapped cabled plates in four different test structures. The impact of the cable wrapping directions along the length and width on the modes that experience the largest stiffening effects are clearly discussed and validated with the test results for the two major wrapping patterns, diagonal and zigzag. It is shown that for a given number of fundamental elements and cable wrapping rows along the length, the parallel pattern experiences the largest stiffening along the length followed by the diagonal and zigzag patterns respectively. Also, the twist mode was stiffened the most for the zigzag pattern and the least in the parallel cabled plate. Finally, the wrapping angle for which the torsional frequency is maximum for each of the diagonal and zigzag patterns is found to be the same. A computational study is also performed to further analyze the system dynamics by varying the host plate dimensions.
Conclusions
The model and test results are shown to be in very good agreement. The analytical model is found to well predict the cables' mass and stiffening effects for all the wrapping patterns studied in this research.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The advancements in the space industry have been significantly impacted by the innovations in materials science that have increased the stiffness-to-weight ratio of structural elements. Although the structural weight has decreased over time, the number of cables harnessed to these lightweight structures has risen due to the increased requirements for data and power transfer. Hence, it has become essential to accurately incorporate the cable dynamics effects while modeling these cable-harnessed structures. In the past, the cables were modeled as an ad hoc lumped mass element, whereas, the stiffness and the damping of these harnessed cables were primarily ignored [1]. But with the cables contributing to as high as 30% of the spacecraft weight [2], accurate modeling of cable stiffness and damping has become important. The high accuracy of these lightweight space structures models is important because the control algorithms heavily rely on them for their robust performance. Also, due to the large size of these structures, their ground testing is difficult before launch and hence, an accurate model becomes further crucial for predicting their dynamic behavior [3].
The previous research works in modeling the cable-harnessed structures have primarily considered rectangular beams as host structures. Moreover, the cables have been assumed to be harnessed on these beams in both longitudinally straight patterns as well as more complicated patterns that include the wrapping around the beam structures. The emphasis on modeling the cable dynamics was first pointed out in 2007 in the preliminary works by U.S. Air Force Research Laboratory [1, 3, 4]. They showed that the cable plays an important role in impacting the dynamics of the host beam when attached longitudinally on its top surface. Later, they characterized the properties of cables [5] and created finite elements models [2] to validate the experimental results. Further research on characterizing the damping mechanisms in the cables and modeling cable-harnessed beams with cables attached longitudinally was done by Spak et al. [6,7,8,9,10] using the distributed transfer function method. Moreover, the damping of the stranded cables modeled as the beam structures have been studied in [11,12,13,14,15]. Choi et al. [16, 17] used the spectral element method to model the dynamics of cable-harnessed beams and was found to be efficient over the finite element method. Recently, Yerrapragada et al. [18,19,20,21] considered the cable harnessed at an offset from the centerline of the beam and studied the coupling effects between different coordinates of motion. In all these works [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21], cables were attached in a longitudinal pattern, whereas the practical applications might have cables harnessed in complicated patterns. Some of these complex patterns were studied by Martin et al. [22,23,24,25,26,27] where the cables were assumed to be wrapped around a beam. This work was further extended by Agrawal et al. [28, 29] to incorporate cable damping effects in the wrapped cable-harnessed beam structures. Recently, Shilei et al. [30] developed and experimentally validated a formulation for obtaining optimal cable wrapping geometry that has minimal impact on the dynamics of the host beam structure. These studies were primarily focused on considering periodic geometry of the wrapped patterns, however, non-periodic cable geometries were also studied in [31].
The beam host structures (one-dimensional) have been used in the above-mentioned works to maintain simplicity in the model, however, for the space applications, the two-dimensional plate-like host structures are more realistic and provide additional insights. Also, there are very few attempts in the literature to model these structures primarily due to their mathematical complexity. Hence, in our recent works [32,33,34], we developed analytical models of the cable-harnessed plates by considering the cable dynamic effects. Other works on cable-harnessed plate structures known by authors have considered numerical methods for modeling purposes [35, 36]; however, no analytical models were proposed. In one of our first works [33], we proposed an analytical model and conducted test validation of the cable-harnessed plates that assumed a system with the cables in a parallel geometry configuration. To build upon this work, the authors developed an analytical formulation of more complex cable geometry in [34] which also involved a detailed parametric analysis to understand the system’s characteristics. In this work, the cables were assumed to be wrapped in the zigzag and diagonal patterns on the rectangular host plates, motivated from the study by Martin et al. [22,23,24,25,26,27] for the wrapped cabled beam structures. In addition, since the simplistic structure such as a parallel configuration was studied earlier in [33] as a stepping stone, there was a need to study more complex cable-harnessed plate structures in [34]. A broader goal of the ongoing research is to create analytical models to obtain an optimal cable placement strategy for plate-like structures such that the changes in system dynamics due to cable attachment are minimized. Minimizing the cables’ dynamic effects would highly simplify the modeling of these structures and in the ideal case, modeling the cable dynamics can be completely ignored if optimal patterns are found. However, finding such patterns is a broader goal of the current research and is not the scope of this paper.
In this paper, an experimental study is conducted on cable-harnessed plate structure to validate the analytical model formulated in our previous work [34]. The change in system dynamics on the attachment of cables on a host plate structure is difficult to model, and this study has been conducted in an attempt to address the challenge. Additionally, the experiments provide further insights into the system and increased confidence in building further complicated models of cable-harnessed structures that include but are not limited to non-periodically wrapped structures. For this purpose, the cable-harnessed plates are fabricated using metallic host plates of different sizes by wrapping the cables in both zigzag and diagonal manner under the clamped-free-free-free (CFFF) boundary conditions. Cables are harnessed in both the planar directions of the rectangular plate in different test cases. The frequency response of these structures is obtained using the experimental modal testing for various actuation and sensing location and are used for model validation purpose. Additionally, the experimental mode shapes and MAC analysis are presented for a robust comparison with the proposed analytical model.
Theory
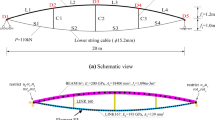
In this section, we present a brief description of the mathematical model, developed in our recent work [34] for the cable-harnessed plate structure as shown in Fig. 1. The cables are considered to be wrapped in zigzag and diagonal patterns. The experimental validation is presented for wrapping along both the \(x\) and \(y\) directions; Fig. 1 shows the schematic for wrapping along the \(x-\) direction only. A repeating entity of the periodic structures is called a fundamental element and is depicted in Fig. 1(a) for the zigzag pattern. For both the patterns shown in Fig. 1, each row of cable harness contains 3 fundamental elements and 5 such parallel rows constitute the entire cable-harnessed structure.

Schematic of the cable-harnessed plate with cables wrapped along the \(x-\) axis (a) zigzag pattern (b) diagonal pattern. The wrapping angle \(\theta\) will be different for zigzag and diagonal pattern and would depend on plate dimensions and wrapping parameters
The analytical formulation developed in Ref. [34] uses an energy-equivalent homogenization method to obtain a linear analytical model of these periodically wrapped structures. This method acts as a powerful tool for mathematical modeling of structures with repeated geometry. To obtain the equivalent continuum model, the expressions of kinetic energy and the strain energy are firstly derived for a repeating fundamental element that contains the contribution from both the plate and cable. Then, the areal energy density expressions are calculated by assuming the displacement as Taylor’s series expansion of the fundamental element center. These densities are assumed to be uniform over the entire domain of the plate for several numbers of repeated elements. Finally, the total homogenized strain and kinetic energy of the system are obtained. These energy expressions are shown in Eqs. 4 and 5 in the Appendix. On applying Hamilton’s principle, the partial differential equations (PDEs) for the equivalent continuum model of the zigzag and diagonal pattern structure are obtained.
Further details of the model assumptions, and strain and kinetic energy derivations are presented in [34]. The following governing equation of motion is obtained for the wrapped cable-harnessed structure:
where \(w\left(x,y,t\right)\) denotes the transverse displacement in the \(z-\) direction. Subscripts after comma represent the spatial derivatives and the overdot \(\dot{()}\) represents the time derivative. The PDE coefficients in equation (1) are expanded in terms of the system parameters in the Appendix. Additionally, the bend-twist coupling coefficients \({H}_{10}\) and \({H}_{11}\) vanishes for the zigzag pattern.
For the current validation study, the clamped-free-free-free (CFFF) boundary conditions are used with \(x=0\) as the clamped edge. Analytically, these boundary conditions for the homogenized system can be written as [34]:
where
The boundary value problem formed by equations (1) and (2) is solved for the natural frequencies, mode shapes, and frequency response functions using the Rayleigh–Ritz method by using 36 approximating functions formed by the mode shapes of clamped-free and free-free beam structure.
Experimental Procedure
In this section, we firstly discuss the experimental modal analysis setup and list different fabricated structures used for validating the proposed analytical model.
To measure the vibration characteristics of the cable-harnessed plate system, the experimental setup shown in Fig. 2 is used. The system consists of a plate harnessed with cables in a periodic wrapping pattern that is clamped at one edge (CFFF boundary). To excite the system, a PCB 086C01 impulse force hammer is used. The response at a selected point on the plate is measured using a contactless Polytec OFV-505 laser vibrometer which is operated using a Polytec OFV-5000 vibrometer controller. An LMS SCADAS mobile data acquisition system is used to acquire the impact and sensing data that is further connected to a laptop. LMS Testlab version 14.0 is used as computer software to control the data acquisition settings and analyze the output vibration data.

Experimental setup of the clamped cable-harnessed plate under impact testing
Both the zigzag and diagonal patterns are tested. In this paper, we present the findings of four test cases, the details of which are listed in Table 1, and the zoomed-in pictures of their fabricated setup are shown in Fig. 3. For each test case, two sets of Frequency Response Functions (FRFs) – I and II are obtained each with a different set of sensing and actuation location coordinates (in meters) listed in Table 2. It should be noted that the cable can be harnessed either along the \(x-\) axis direction or the \(y-\) axis and hence, both the wrapping directions/alignments are considered.

Zoomed-in pictures of the zigzag and diagonal pattern cable-harnessed plates (a) Case 1, (b) Case 2, (c) Case 3, and (d) Case 4
In our previous work on the development of analytical formulation [34], a detailed analysis of both the patterns and wrapping along both directions are presented. In the current paper, tests 1 and 3 have similar parameters considered for two cases analyzed in [34]. Moreover, for other tests, different dimensions of the host plates are considered for validation purposes in addition to different wrapping parameters i.e. number of fundamental elements and number of rows.
In all the structures, the attached cable used for testing is Super 8 Slick Power Pro cable, also used previously in experiments in [19, 27, 33], has the following material properties: \({E}_{c}=128\ GPa\), \({\rho }_{c}=1400\ Kg/{m}^{3}\). The cable radius is \({r}_{c}=0.20\ mm\), however, to enhance the effects of cables on the harnessed system, eight fully tensioned cables are wrapped on the structure. Hence, the effective radius of the cable becomes \(\sqrt{8}*\left(0.20\ mm\right)=0.56\ mm\) [19]. The applied pre-tension in the cable is kept at \(5\ N\) in all the tests. Additionally, the host plate is made of Aluminum (Al-6061) alloy with the following material properties: Young’s Modulus \({E}_{p}=68.9\ GPa\), mass density \({\rho }_{p}=2768\ Kg/{m}^{3}\), and Poisson’s ratio \(\nu =0.33\).
Results and Discussion
In this section, firstly, the test frequency response functions (FRFs) of the bare plate (plate without cables) are compared with those obtained from the classical plate theory model for establishing an accurate model of the host structures. Consequently, the test FRFs and the mode shapes of the cable-harnessed plate structures for both wrapping patterns are compared with model predictions. Further discussion is aimed towards comparing the observed shift in system dynamics for different cable harness patterns. Finally, the observed modal characteristics and the proposed model of the system are compared with a cable-harnessed beam-like model to highlight the contribution of this research.
Bare Plate Test and Model FRFs
Figures 4 and 5 show the FRFs obtained from the impact tests of the four bare host plates. Table 1 lists the dimensions of these plates. For each case, the FRF plots obtained from the test are shown for the two sets of actuation and sensing locations (coordinates listed in Table 2) and are compared with the model results. It is seen that all the natural frequency peaks and the anti-resonance frequencies are well-predicted by the model; hence, the host plate parameters can be confidently used further in the cable-harnessed models. Additionally, in the set II FRFs shown in Figs. 4(a) and 5(a), a small spike at 60 Hz is present due to the electrical noise and does not correspond to a structural mode.

Bare plate FRFs comparison between test and model for (a) test case 1, and (b) test case 2 (I and II denote the two sets of actuation/sensing location)

Bare plate FRFs comparison between test and model for (a) test case 3, and (b) test case 4 (I and II denote the two sets of actuation/sensing location)
Cabled Plate Model and Test FRFs
Zigzag Pattern
In this section, the changes in system dynamics due to cable attachment in the zigzag pattern are discussed. The FRF comparisons of the system wrapped in the zigzag pattern corresponding to test cases 1 and 2 are shown in Fig. 6. Recall, the wrapping direction for test case 1 is along the \(x-\) axis, whereas for test case 2, the wrapping is along the \(y-\) axis (refer Fig. 3). The three FRFs showed in each plot of Fig. 6 help us deduce two important observations: 1. Comparison of the bare plate test FRF with the cabled plate test FRF shows the importance of modeling the cable dynamics, 2. The model FRF obtained using the proposed modeling technique accurately predicts the change in the system’s resonant frequencies upon adding the cables.

FRF comparisons of cabled plate test, cabled plate model and bare plate test for (a) test case 1, and (b) test case 2, corresponding to the zigzag pattern (I and II denote the two sets of actuation/sensing location)
It is observed for Test case 1 that the cable stiffness effects are dominant over its inertia effects and as a result, the natural frequencies shoot up on harnessing cables. The natural frequencies predicted by the model are listed in Table 3. It is observed that the increase in frequencies on harnessing cables is significant for Test case 1 in the frequency range of interest.
Figure 7 shows the mode shapes corresponding to test case 1, from both model and test. The modes 1, 3, and 5 are Bending Modes with a dominant curvature along the \(x-\) direction (BMX modes), whereas the modes 2 and 4 are twist/torsional (TM) and coupled-bending (CB) dominant modes, respectively. Mathematically, for case 1, the increase in natural frequencies on adding the cables is due to the dominant effect of the cable stiffness in the coefficient \({H}_{2}\) for the bending modes, and the coefficients \(({H}_{4}+{H}_{13})\) for the twist and coupled-bending dominant modes, over the cable inertia effect. A detailed discussion on the coefficients was presented in our previous work [34].

Mode shapes obtained from homogenized model and experiments for test case 1 (Zigzag pattern with cable harnessing along the \(x-\) direction)
Additionally, it should be noted that since the cable segments are aligned at an angle with the horizontal \(x-\) axis, the cable stiffness contribution in the BMX modes would be smaller compared to the case when the same number of cables are harnessed parallel to the \(x-\) axis as studied in [33]. This is because, in the case of zigzag pattern, the effective increase in stiffness in the \(x-\) direction would be a projection of the cable stiffness on the \(x-\) axis which would be small compared to the case when the cable is harnessed parallel to the \(x-\) axis. On the other hand, for the twist and coupled-bending dominant modes, since the added cable stiffening effect is proportional to \(\mathrm{cos}\theta {\mathrm{sin}}^{2}\theta\) (as seen from the first-order cable effects from the coefficient \(({H}_{4}+{H}_{13})\)), the natural frequencies increase is higher for the zigzag pattern compared to the parallel pattern.
On the other hand, for the Test case 2 FRF in Fig. 6(b), it is seen that in addition to some modes showing a dominant cable stiffening effect, natural frequencies of a few modes either do not change significantly or decrease after cables are harnessed.
For test case 2, the mode shapes in Fig. 8 can also be similarly categorized. Here, the modes 1 and 4 are BMX modes, the modes 3 and 6 are Bending Modes with a dominant bending curvature along the \(y-\) direction (BMY modes), while the others are twist and coupled-bending modes in the range of frequency shown in Fig. 6(b). It should be noted from Table 3 that the natural frequency of the modes 1 and 4 show a dominant cable inertia effect over its stiffening effect because the cabled plate frequencies are lower than the bare plate for the model as well as the test. Physically, this is because the angle between the inclined cable segments and the \(x-\) axis is fairly large resulting in a very small projection of cable stiffening along the \(x-\) direction; hence, the cable inertia effect dominates. On the other hand, the modes 3 and 6 show a large increase in natural frequency on harnessing cables along the \(y-\) direction. These modes, with dominant bending curvature in the \(y-\) direction, are stiffened due to a large projection of cable stiffness along the \(y-\) axis. This increases the effective bending stiffness in the \(y-\) direction that is dominant over the added cable inertia effect. It should be noted that these observations are based on a fixed number of fundamental elements per row, which is considered 3 in this case. If this number is made to increase, the wrapping angle with the \(y-\) axis would also increase resulting in a lower contribution of cable stiffening effect in modes with dominant curvature in the \(y-\) direction and higher contribution for dominant bending modes in the \(x-\) direction. A similar logic also applies to test case 1.

Mode shapes obtained from homogenized model and experiments for test case 2 (Zigzag pattern with cable harnessing along the \(y-\) direction)
Additionally, the modes 2, 5, and 7, which are twist and coupled-bending modes in test case 2, are also shown to exhibit a dominant cable stiffening effect which is well predicted by the model. The increase in natural frequency of coupled-bending modes is although not as significant compared to the BMY modes because the presence of curvature in the \(x-\) axis restricts the increase in cable stiffening effect. As discussed before, when the cables are wrapped along the \(y-\) axis direction, the curvature of modes along the \(y-\) direction increases the cable stiffening effect while that in \(x-\) direction decreases it.
Further, we observe a larger error in natural frequencies of the cable-harnessed plate model for the higher modes. It is because of the smaller number of fundamental elements per wavelength of the frequency of interest for the higher modes. Additionally, we also observe that due to the absence of damping in the analytical model, there is an overshoot in the response near the resonant peaks which leads to a visible difference in the response predicted by the model. Modeling the damping mechanism is essential for predicting the accurate response in the resonant regions; however, to avoid mathematical complexity in the analytical model developed in our previous work [34], the damping was neglected from the model.
One of the best methods to quantitatively correlate the mode shapes obtained from experiments and model is using the Modal Assurance Criterion (MAC) [37]. A correlation number is calculated between different pairs of mode shapes obtained from both test and model. In the current study, the MAC analysis is conducted for test cases 1 and 2 for which experimental mode shapes are also presented. The MAC is presented in a three-dimension bar chart shown in Fig. 9 for both the test cases. Clearly, the MAC values being close to one along the diagonal and close to zero among the off-diagonal elements indicate a strong correlation between the model and test.

Modal Assurance Criterion (MAC) analysis bar chart for the test cases 1 and 2
Diagonal Pattern
The FRFs obtained from the experiments of the diagonally wrapped cable-harnessed structures (cases 3 and 4) are presented in Fig. 10 and the natural frequencies are listed in Table 4. The FRFs are presented for both the sets of actuation and sensing locations presented in Table 2. In both the structures, the cable is wrapped along the \(x-\) axis direction but on different host plates and with a different number of cable rows as shown previously in Table 1. The proposed model for the diagonal pattern is shown to well predict the cable dynamics effects and hence, matches well with the test results for both the test structures. As seen from Fig. 10(a) and Table 4, the natural frequencies of the modes 1, 3, and 5 show a large increase on harnessing cables, whereas the frequencies of the modes 2 and 4 have a relatively smaller increase. This is because the wrapping parameters of the diagonal pattern results in a small wrapping angle \(\theta\) with the \(x-\) axis. Similar to case 1 of the zigzag pattern, this results in the stiffening of the modes that have dominant bending curvature in the \(x-\) direction, although it is later discussed in Sec 4.3 that the % increase in frequencies is different for both the patterns. For test case 3, the modes 1, 3, and 5 have a bending dominant curvature in the \(x-\) direction (similar to BMX modes shown for test case 1 in Fig. 7); hence, the cable stiffening effect is higher for these modes and the natural frequencies increase significantly. However, for the modes 2 and 4, the cable stiffening effect is not too high due to the dominant curvature not being along the \(x-\) direction. As a result, the natural frequencies for these modes do not increase significantly.

FRF comparisons of cabled plate test, cabled plate model and bare plate test for (a) test case 3, and (b) test case 4, corresponding to the diagonal pattern (I and II denote the two sets of actuation/sensing location)
Similar to case 3, the natural frequency of the modes 1 and 3 of test case 4 were also observed to increase significantly owing to its bending dominant shape as discussed in the previous paragraph. Also, the modes 2 and 4 are shown to increase, although not as significantly. This also demonstrates that different modes undergo a different change in frequencies which depends on the mode shape as well as the wrapping parameters. This was studied in detail in our previous work [34]. In this paper, we witness that these dissimilar changes of frequencies in different modes occur in experimental results as well and are a very close match with the model prediction. Also, as mentioned earlier for the zigzag patterns’ cases, the larger error at the higher modes in these cases is due to the limitations shown by the homogenization method owing to the smaller number of fundamental elements per wavelength of the frequency of interest for the higher modes.
To conclude this section, a brief discussion on the model error is done in contrast on our previous research on the parallel cable-harnessed plate structures [33]. For the study conducted on the parallel configuration, a three-test average of root mean square (RMS) errors between model and test for the first five natural frequencies yielded a value of 2.21%. Whereas, in the current work on the periodic structures, the average RMS error over four tests in the model is 1.54%, which is lower than that shown in the case of the parallel cabled plate. The reason can be attributed to the higher number of fundamental elements per unit area in the periodic cabled plates tested in the current work. In all the tests in periodic cabled plate, the number of elements per unit area is 750 elements/\({m}^{2}\), whereas for the parallel cabled plate, the number of elements per unit area was in the range of 250 – 274 elements/\({m}^{2}\). Clearly, with a higher number of elements per unit area in the periodic cabled plate, the homogenization method is seen to predict the experimental results more accurately and hence, shows a smaller model error.
Comparison Between Different Cable Attachment Patterns
The dynamic effect of cable attachment discussed so far for the periodic cable-harnessed structures is now compared with parallel cable-harnessed plate structures presented in [33] in further detail. A quantitative discussion on the comparison of the shift in dynamics for each pattern is followed by a general qualitative analysis. In the previous work, the model development and experimental validation were conducted on the plate structures (under CFFF boundary) with multiple cables harnessed either along \(x\) or \(y\) axis direction in a parallel configuration equidistant from each other.
Firstly, the cables attached parallel to the \(x-\) direction is discussed. The bending modes with dominant curvature in the \(x-\) direction are found to have a higher cable stiffening effect in the parallel cabled plate compared to the zigzag or diagonal pattern (wrapping alignment along the \(x-\) direction). Since the cables are parallel to the \(x-\) axis for the former case, its stiffness contribution towards this bending mode is the highest. As well, in the case of the parallel cabled plate, the phenomenon of mode switching was observed due to a higher stiffening effect where a bending mode in the \(x-\) direction switched its position with a mode that occurred at a higher frequency in case of the bare plate. In the case of periodic patterns, mode switching was not observed in the frequency range of interest. Moreover, the torsional mode frequency was almost insensitive upon cable attachment for parallel cabled plates, whereas, due to the large wrapping angle in the zigzag pattern test cases, this mode shows a noticeable cable stiffening effect.
For the experiment with cables attached parallel to the \(y-\) axis in [33], a comparison can be made with test case 2 (zigzag pattern with cables harnessed along the \(y-\) axis) of the current work. In both these cases, it is observed that the bending mode with dominant curvature in the \(x-\) direction showed a dominant inertia effect due to cable attachment, which was well predicted by the respective models. Moreover, the bending mode with dominant curvature in the \(y-\) direction showed an overall cable stiffening effect due to the alignment of cables either parallel to or along the \(y-\) axis. The stiffening effect was, however, higher in the case of the parallel cabled plate due to the higher contribution of cable stiffness effect in the \(y-\) direction. For the first torsional mode, the cable stiffness has a higher contribution in the zigzag pattern due to the alignment of the cable segments at an angle with the plate’s edge, thereby increasing the torsional rigidity of the system. These observations and corresponding model predictions further highlight the contribution of the current work and provide a good insight into the cable placement effects to the scientists and design engineers.
Next, a quantitative discussion is presented on the change in system dynamics when cables are harnessed in different patterns. Figure 11(a) shows the comparison of this change for test cases 1 and 3 where the vertical axis shows the shift in natural frequency of cable-harnessed plate with respect to the bare plate. Recall, the cases 1 and 3 have the cables wrapped in the zigzag and diagonal pattern, respectively, with the same number of fundamental elements and rows. Also, the host plate in both cases has similar dimensions that allow for a fair comparison. The model data of a cabled plate with parallel cables [33] is also plotted in Fig. 11(a) for comparison with the two wrapping patterns. The host plate for the parallel cabled plate is assumed similar to that of test cases 1 and 3, while the rows of cables are attached parallel to the \(x-\) axis having the same geometric and material properties as the tested cases of wrapped structures.

(a) Comparison of % change in first five natural frequencies of cable-harnessed plates with respect to the bare plate for zigzag (Case-1), diagonal (Case-3), and a parallel cabled plate model, (b) Model comparison across first five modes between the % change in natural frequencies of cable-harnessed plates for zigzag (Case-1), diagonal (Case-3) pattern cabled plate, and the cases with a different wrapping angle that corresponds to the maximum (-Max) torsional frequency (Mode-2)
For the two wrapping patterns, the % increase in frequencies predicted by the model matches well with the test results as seen from Fig. 11(a). It is seen that the increase in frequencies on harnessing cables is significantly higher for the modes 1, 3, and 5 of the diagonal pattern compared to the zigzag pattern. This is because of the higher contribution of the cable stiffening in the BMX modes due to the smaller wrapping angle of the inclined cable segments (with the \(x-\) axis) in the diagonal pattern.
On the other hand, the modes 2 and 4 show a higher frequency increase for the zigzag pattern. Analytically, the cable stiffening terms present in the twist and coupled-bending stiffness \(\left({H}_{4}+{H}_{13}\right)\) are accountable for the higher natural frequencies in the zigzag pattern. These added cable stiffness in these coefficients is directly proportional to the term \((\mathrm{cos}\theta {\mathrm{sin}}^{2}\theta )\), where \(\theta\) is the wrapping angle shown in Fig. 1. This term can be obtained by using the coefficients given in the Appendix for both the patterns (developed in Ref. [34]) by analyzing the second-order terms \(\left(\frac{T{z}_{c}^{2}}{{L}_{2}\mathrm{cos}\theta }+\frac{{N}_{x}{h}^{2}}{24}+\frac{{N}_{y}{h}^{2}}{24}\right)\), and finding them negligible compared to the first order terms for the studied system parameters. This results in \(({H}_{4}+{H}_{13})\) exhibiting a maximum at a wrapping angle of \(54.7^\circ\) (say \({\theta }_{T,max})\). For the wrapping parameters considered in this study, the wrapping angle, \(\theta\), in the zigzag pattern (case-1) and diagonal pattern (case-3) is approximately 30.5° and 16.4°, respectively. As a result, the added twist and coupled-bending stiffness due to the cables are higher for the zigzag pattern. An interesting point to note about the angle, \(54.7^\circ\), is that when \(90^\circ\) (vertex angle of a rectangular plate) is divided by it, we obtain a number close to the golden ratio. Hence, when a cable is wrapped at an angle corresponding to the maximum torsional frequency, the torsional mode (Mode-2 in this case) would undergo a maximum cable stiffening effect for both the patterns.
At a first glance, it may seem that the zigzag pattern shows the least variation in % change in natural frequencies (flat behavior), as shown in Fig. 11(a); however, similar behavior can be achieved for the diagonal pattern if a different wrapping angle is chosen. To further examine the variations in frequencies w.r.t. the host plate across different modes for both the patterns, Fig. 11(b) is plotted to compare the model results of cases 1 and 3 to that of the zigzag and diagonal structures that correspond to the wrapping angle at which torsional frequencies are maximum \(({\theta }_{T,\mathrm{max}})\). If \(\theta\) approaches \({\theta }_{T,max}\), the torsional mode frequency (Mode-2 in this case) would achieve the highest possible value for the corresponding pattern. This can also be interpreted by considering the energy transfer between the bending and torsional modes; as \(\theta\) approaches \({\theta }_{T,max}\), the torsional mode receives a larger portion of energy compared to the BMX modes (modes-1, 3, and 5). Hence, upon examination of Fig. 11(b), it is clear that the zigzag pattern has no longer the flat behavior for the case when a wrapping angle corresponding to maximum torsional frequency is chosen.
The comparison with parallel cabled plates is now discussed. The first five mode shapes for the parallel cabled plate were also found to be same as the wrapped cabled plates considered in test cases 1 and 3. Compared to the wrapped patterns in Fig. 11(a), the parallel cabled plate has the highest % shift in bending frequencies in the \(x-\) direction (Modes 1, 3 and 5) after the cables are harnessed. For the twist dominant mode (Mode-2), the parallel cabled plate has almost no effect on the natural frequency as was also observed in [33] because the cable stiffening effects in this mode becomes higher when the cable is harnessed at an angle with the plate’s edge.
Fig. 11(a) can also be analyzed with a design perspective for wrapping cables on a plate-like structure. The length of the wrapped cable in each row is fairly similar for the two wrapped patterns for a similar number of fundamental elements. Hence, for a given cable length, a pattern can be selected such that either (a) specific vibration modes can be highly stiffened or (b) all the structural modes in a broad range of frequency can be moderately stiffened. For example, if the torsional mode of a host structure needs to be stiffened, harnessing cables in the zigzag pattern would be the best choice as it provides the highest added cable stiffness amongst all the patterns for Mode-2 for the given number of fundamental elements. However, it should be noted that this observation is based on the wrapping parameters considered in this study. For a different set of parameters, there is a possibility that the diagonal pattern could exhibit a higher stiffening effect for Mode-2. Since the dynamics of the torsional mode is analytically governed by the coefficient \(\left({H}_{4}+{H}_{13}\right)\), increasing the number of fundamental elements would initially increase the torsional stiffness in the system, and then it would eventually decrease [34].
On the other hand, based on a different design philosophy, the designer can also choose an optimal cable pattern such that there is the least impact of the cables on the system dynamics and in the best-case scenario, the cable modeling can be completely ignored in a structure that is optimally wrapped. According to Fig. 11(a), the zigzag pattern seems to be a possible optimal pattern because of its similar increase in frequencies across different modes (the black curve is almost flat). Again, this observation is based on the system parameters considered for the experimental study in this work and the diagonal pattern would also show a flatter characteristic if the wrapping angle were increased. Hence, as one of the promising future works, optimal wrapping parameters can be obtained using the developed analytical technique resulting in a cable placement strategy that would have a minimal dynamic impact on the host plate structure on harnessing cables.
Comparison of Change in System Dynamics for a Special Case
In this section, a brief discussion is done on an observation made when the test cases of the diagonal pattern (cases 3 and 4) are compared. In both these cases, the size of the fundamental element in the cabled plates is approximately equal albeit the host plate dimensions are different. Further, on a closer inspection of the % increase in frequency for the two tests from Table 4, it is seen that certain modes have a similar shift. This observation acted as a motivation to conduct a model-based analysis in which the dimensions of the host plate were varied while those of fundamental elements were kept fixed. Four host plates of different dimensions were used as listed in Table 5, all of them have a thickness of 1.2 mm and are made of aluminum-6061 alloy. Further, the natural frequencies of the bare host plate were calculated for a CFFF boundary and were classified according to their mode shape. Next, the natural frequencies of the cabled plate corresponding to these host plates were calculated with the wrapping parameters shown in Table 5, and they were similarly classified. The properties of the cable used for this analysis are the same as those used in the tests mentioned in Sec 3. It should be noted that for the cases listed in Table 5, the dimensions of the fundamental elements for both the patterns would be 6.67 cm × 2 cm.
The % change in natural frequencies are presented in Fig. 12 for the first three dominant bending modes in \(x-\) direction (BMX-1 – BMX-3), first bending dominant mode in \(y-\) direction (BMY-1), 1st twist dominant mode (TM-1), and 1st coupled bending dominant mode (CB-1). These mode shapes are not shown in the order of increasing natural frequencies as the order varies with change in host plate dimensions. We observe that for the diagonal pattern, the % change in bending modes (both with dominant curvature in the \(x\) and \(y\) direction) frequencies is almost insensitive of the host plate width when the fundamental element dimensions are held constant. On the other hand, the % increase in the twist and coupled-bending dominant mode frequency increases as the host plate width is increased. Interestingly, the experiments in the current study exhibit the least % increase in frequency for these two modes compared to the bending dominant modes.

Comparison of the change in natural frequencies for host plate with different dimensions but with similar dimensions of the fundamental element of (a) diagonal pattern, (b) zigzag pattern
In the case of the zigzag pattern, it is observed that the stiffening effect in BMY-1 mode increases as the host plate width is increased, while the % change in frequencies of other modes is relatively insensitive. This behavior contrasts with that observed for variation in BMY-1 mode in the diagonal pattern and hence, further investigations were done. Since the cabled plate system for both the patterns have dominant cable stiffness contribution over inertia, the reasoning of this observation lies in strain energy comparisons. After comprehensive calculations, the increase in % shift in natural frequency with decreasing plate width for the zigzag pattern was attributed to the change in the contribution of different components that sums up in the calculation of strain energy. These major components are strain energy due to bending curvature in \(x-\) direction \({H}_{2}{\left(w{,}_{xx}\right)}^{2}\), in \(y-\) direction \({H}_{3}{\left(w{,}_{yy}\right)}^{2}\), and due to twist \({H}_{4} {\left(w{,}_{xy}\right)}^{2}\). Upon calculations, it was observed that when the plate width was increased from 10 to 30 cm, the contribution in the total strain energy of the cabled plate due to the component \({H}_{3}{\left(w{,}_{yy}\right)}^{2}\) decreased from 100% to 45.66% while that in \({H}_{2}{\left(w{,}_{xx}\right)}^{2}\) and \({H}_{4} {\left(w{,}_{xy}\right)}^{2}\) increased from 0.00% in each case to 12.56% and 47.47%, respectively. Intuitively, the changes in these energy components occur because the smaller width plate has a higher curvature along the \(y-\) direction of BMY-1 mode at the points where the non-dimensional parameter \(y/b\) is equal (while \(x\) is constant). Here, \(y\) is the distance of the point from the origin along \(y-\) axis and \(b\) is the plate width. A similar change in contribution was observed for the diagonal pattern; however, because the percentage contribution of cable’s strain energy within these (total) strain energy components was different in the zigzag pattern, the overall trend for BMY-1 mode is found different in the two patterns in Fig. 12. On calculations, it was seen that when plate width was increased from 10 to 30 cm, the cable’s strain energy component for the diagonal pattern increased from 5.7% to 6.40%, whereas for the zigzag pattern, it increased from 1.58% to 7.01% resulting in a large increase in variations for BMY-1. Intuitively, for the BMY-1 mode, when the plate width is lower, the cable sections along the \(y-\) axis in addition to a higher curvature along the \(y-\) axis contribute to a higher stiffening effect in the diagonal pattern; however, when the plate width is higher, the larger cable wrapping angle in the zigzag pattern is the dominating factor (owing to the curvature along the \(y-\) axis being smaller) that results in a higher % change in natural frequency.
In our earlier work [34], it was found that the cable stiffening effect depends on the wrapping angle \(\theta\) and it was inferred that a smaller cable wrapping angle increases the natural frequency of the BMX modes. As a result, in Fig. 12, the BMX modes show a higher % increase in natural frequency for the diagonal pattern because of a smaller wrapping angle compared to the zigzag pattern for the same number of fundamental elements and rows. Similarly, it is expected that the BMY-1 mode would show a higher stiffness for the pattern with a larger wrapping angle (due to the higher contribution of cable stiffness in the \(y-\) direction). However, this doesn’t always directly apply to the BMY-1 mode due to the presence of a cable section along the \(y-\) axis in the diagonal pattern (refer Fig. 1(b)). As seen from Fig. 12, the diagonal pattern with 20 cm × 10 cm dimension, although has a smaller wrapping angle compared to the corresponding zigzag pattern, exhibits a higher stiffening effect in the \(y-\) direction. This effect however reverses when the 20 cm × 30 cm plate is considered, and the detailed explanation was discussed in the previous paragraph.
Comparison Between Cable-Harnessed Beam-Like and Plate-Like Models
It is worth discussing the importance of the proposed cable-harnessed plate model over the previously established work on the cable-harnessed beam model [26] that considers the host structures as a one-dimensional beam-like structure. Hence, simplified assumptions are made for the periodic structures in this study to implement beam theory assumptions to obtain the FRFs when they are modeled as beam specimens. The mathematical modeling technique developed in [26] is used for plotting the FRFs obtained by dividing each plate into beam segments along the \(x-\) direction and comparing it with those obtained from the model proposed in this paper.
Figures 13 and 14 show the comparison of the cabled beam model with the test and model results of the cabled plate for both the zigzag and diagonal patterns, respectively. The results are shown for the set I of actuation and sensing locations. The cabled beam FRF is clearly unable to predict all the natural frequencies in the range of interest. This is primarily because of the absence of the variation of displacement along the \(y-\) axis in the homogenized beam model. Whereas, the current model, which is based on the plate theory assumptions, can predict the accurate dynamics. In Fig. 13(a), the modes 1, 3, and 5 have dominant bending curvature in the \(x-\) direction and hence are predicted well by the beam model, but the other two modes that are responsible for twist and coupled-bending behavior are missed. Similarly, the modes in Fig. 13(b) that corresponds to the dominant bending curvature in \(y-\) direction, along with the twist and coupled-bending modes are not predicted. Likewise, for the diagonal pattern structures shown in Fig. 14, the cabled beam model fails to predict the vibration modes that have transverse displacements varying along the \(y-\) direction.

FRF comparison with an equivalent cabled beam model for the zigzag pattern corresponding to the test cases 1 and 2

FRF comparison with an equivalent cabled beam model for the diagonal pattern corresponding to the test cases 3 and 4
Conclusions
In this paper, the experimental validations for an analytical model developed for cable-harnessed plate-like structures were successfully conducted. The experimental and model results are shown to be in good agreement. The test structures consist of homogeneous and isotropic rectangular host plates that are harnessed with cables in the zigzag and diagonal periodic wrapping patterns. The natural frequencies, mode shapes, and frequency response functions are obtained for four test cases of cable-harnessed and host plate structures under clamped-free-free-free boundary conditions where the plates are clamped along the width. The harnessing cables are found to have significant impacts on the dynamics of the host plate structures which are well predicted by the analytical model.
Upon comparison between plate structures wrapped along the length with each of the parallel, zigzag, and diagonal patterns, it was found that the modal frequencies with their dominant curvatures in the longitudinal direction are increased the most for the parallel pattern and the least for the zigzag. A similar behavior is observed when the cables are wrapped along the width for the modes with their dominant curvature along the width direction. Additionally, the wrapping angle for a given set of system parameters for which the twist frequency is the highest was found. Interestingly, this angle is found to be independent of any of the plate or cable parameters.
A detailed comparative analysis between cable-harnessed plates of different widths while keeping the fundamental element size the same yielded the highest change for the frequencies of the bending dominant modes along the width for the zigzag pattern when compared to the host plate with no cables; whereas, this change in frequencies was shown to be the highest for the twist and coupled bending modes in the diagonal pattern. Finally, the comparison between the experimental results with those from the cable harnessed beam analytical models clearly demonstrates the need for an analytical model for cable harnessed plate structures.
Abbreviations
- A c :
-
Cable cross-sectional area
- a :
-
Plate length along the x - direction
- b :
-
Plate width along the y - direction
- D :
-
Flexural rigidity of the plate, \(\frac{{E}_{p}{h}^{3}}{12\left(1-{\nu }^{2}\right)}\)
- E p :
-
Plate Young’s modulus
- E c :
-
Cable Young’s modulus
- H i :
-
Coefficients in expression of system’s total strain energy (i = 1 to 13)
- h :
-
Plate thickness
- K 1 :
-
Coefficient in system’s total kinetic energy expression
- L :
-
Length of a fundamental element
- L 2 :
-
Width of a fundamental element
- m :
-
Number of fundamental elements in a pattern in each row
- n :
-
Number of rows of repeating fundamental elements
- N x :
-
Uniformly distributed compressive load per unit length in the x - direction
- N y :
-
Uniformly distributed compressive load per unit length in the y - direction
- N xy :
-
Uniformly distributed shear load per unit length in the 𝑥𝑦 plane
- T :
-
Cable pre-tension
- T sys :
-
Total kinetic energy of the system
- t :
-
time
- U sys :
-
Total strain energy of the system
- w :
-
Transverse displacement
- (x,y,z):
-
Global coordinate system
- zc :
-
𝑧 coordinate of the plate-cable interface
- 𝜌p :
-
Plate mass density
- 𝜌c :
-
Plate mass density
- 𝜃:
-
Cable wrapping angle
- v :
-
Poisson’s ratio
References
Robertson L, Lane S, Ingram B, Hansen E, Babuska V, Goodding J, Mimovich M, Mehle G, Coombs D, Ardelean E (2007) Cable effects on the dynamics of large precision structures. 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, American Institute of Aeronautics and Astronautics, Reston, Virginia pp. 2389
Babuska V, Coombs DM, Goodding JC, Ardelean EV, Robertson LM, Lane SA (2010) Modeling and experimental validation of space structures with wiring harnesses. J Spacecr Rockets 47(6):1038–1052
Ardelean EV, Goodding JC, Mehle G, Coombs DM, Babuška V, Robertson, LM, Lane SA, Ingram BR, Hansen EJ (2007) Dynamics of cable harnesses on large precision structures, collect. Tech. Pap. - AIAA/ASME/ASCE/AHS/ASC Struct. Struct Dyn Mater Conf 8(April):8225–8235
Goodding J, Babuska V, Griffith DT, Ingram B, Robertson L (2007) Studies of free-free beam structural dynamics perturbations due to mounted cable harnesses. 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, American Institute of Aeronautics and Astronautics, Reston, Virginia pp. 1–13
Goodding JC, Ardelean EV, Babuška V, Robertson LM, Lane SA (2011) Experimental techniques and structural parameter estimation studies of spacecraft cables. J Spacecr Rockets 48(6):942–957
Spak K, Agnes G, Inman D (2013) Cable modeling and internal damping developments. Appl Mech Rev 65(1):010801
Spak K, Agnes G, Inman D (2013) Comparison of damping models for space flight cables. Chapter 21 pp. 183–194
Spak KS, Agnes GS, Inman D (2013) Towards modeling of cable-harnessed structures: cable damping experiments. 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, American Institute of Aeronautics and Astronautics, Reston, Virginia pp. 1889
Spak K, Agnes G, Inman D (2014) Parameters for modeling stranded cables as structural beams. Exp Mech 54(9):1613–1626
Spak KS, Agnes GS, Inman DJ (2015) Modeling vibration response and damping of cables and cabled structures. J Sound Vib 336:240–256
Lesieutre GA (2010) Frequency-independent modal damping for flexural structures via a viscous geometric damping model. J Guid Control Dyn 33(6):1931–1935
Lesieutre GA, Kauffman JL (2013) A viscous geometric beam damping model for nearly constant modal damping AIAA J 5(7):1688–1694
Kauffman JL, Lesieutre GA, Babuška V (2014) Damping models for shear beams with applications to spacecraft wiring harnesses. J Spacecr Rockets 51(1):16–22
Kauffman JL, Lesieutre GA (2013) Damping models for timoshenko beams with applications to spacecraft wiring harnesses. 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, American Institute of Aeronautics and Astronautics, Reston, Virginia pp. 1890
McPherson BN, Lesieutre GA, Kauffman JL (2018) Investigation of viscous damping terms for a timoshenko beam. 2018 AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, American Institute of Aeronautics and Astronautics, Reston, Virginia pp. 1–12
Choi J, Inman DJ (2014) Spectrally formulated modeling of a cable-harnessed structure. J Sound Vib 333(14):3286–3304
Choi J, Inman D (2013) Development of predictive modeling for cable harnessed structure. 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, American Institute of Aeronautics and Astronautics, Reston, Virginia pp. 1888
Yerrapragada K, Salehian A (2019) Analytical study of coupling effects for vibrations of cable-harnessed beam structures. J Vib Acoust 141(3):31001
Yerrapragada K, Salehian A (2019) Coupled dynamics of cable-harnessed structures: experimental validation. J Vib Acoust 141(6):061001
Yerrapragada K, Salehian A (2018) Coupled bending, torsion and axial vibrations of a cable-harnessed beam with periodic wrapping pattern. ASME 2018 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, American Society of Mechanical Engineers pp. V008T10A030-V008T10A030
Yerrapragada K, Salehian A (2017) Coupled axial, in plane and out of plane bending vibrations of cable harnessed space structures. International Conference on Applied Mathematics, Modeling and Computational Science. Springer pp. 249–257
Martin B, Salehian A (2013) Vibration analysis of string-harnessed beam structures: a homogenization approach. 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. American Institute of Aeronautics and Astronautics, Reston, Virginia, pp. 1892
Martin B, Salehian A (2013) Dynamic Modelling of Cable-Harnessed Beam Structures with Periodic Wrapping Patterns: A Homogenization Approach. Int J Model Simul 33(4):185–202
Martin B, Salehian A (2013) Cable-harnessed space structures: a beam-cable approach. 24th International Association of Science and Technology for Development International Conference on Modelling and Simulation, ACTA Press Calgary, AB, Canada pp. 280–284
Martin B, Salehian A (2014) Vibration modelling of string-harnessed beam structures using homogenization techniques. Volume 4B: Dynamics, Vibration, and Control. American Society of Mechanical Engineers pp. V04BT04A074-V04BT04A074
Martin B, Salehian A (2016) Mass and stiffness effects of harnessing cables on structural dynamics: continuum modeling. AIAA J 54(9):2881–2904
Martin B, Salehian A (2016) Homogenization modeling of periodically wrapped string-harnessed beam structures: experimental validation. AIAA J 54(12):3965–3980
Agrawal P, Salehian A (2020) Damping mechanisms in cable-harnessed structures for space applications: analytical modeling. J Vib Acoust 143(2):021001
Agrawal P, Salehian A (2020) Damping mechanisms in cable-harnessed structures for space applications: experimental validation. J Vib Acoust 143(2):024502
Cao S, Agrawal P, Qi N, Salehian A (2020) Optimal geometry for cable wrapping to minimize dynamic impacts on cable-harnessed beam structures. J Vib Acoust 143(4):041005
Martin B, Salehian A (2019) Continuum modeling of nonperiodic string-harnessed structures: perturbation theory and experiments. AIAA J 57(4):1736–1751
Agrawal P, Salehian A (2019) Vibration analysis of cable-harnessed plate structures. Proceedings of the 26th International Congress on Sound and Vibration, ICSV 2019, Montreal, QC, Canada 1–8
Agrawal P, Salehian A (2020) Vibrations analysis of cable-harnessed plates: continuum modeling and experimental validation. J Vib Acoust 143(5):051004
Agrawal P, Salehian A (2021) Continuum modeling and vibrations analysis of cable-harnessed plate structures of periodic patterns. J Vib Acoust 143(6):061007
Coombs DM, Goodding JC, Babuška V, Ardelean EV, Robertson LM, Lane SA (2011) Dynamic modeling and experimental validation of a cable-loaded panel. J Spacecr Rockets 48(6):958–973
Remedia M, Aglietti GS, Richardson G (2015) Modelling the effect of electrical harness on microvibration response of structures. Acta Astronaut 109:88–102
Pastor M, Binda M, Harčarik T (2012) Modal assurance criterion. Procedia Eng 48:543–548
Acknowledgements
The research was funded by the Natural Sciences and Engineering Research Council of Canada (NSERC-DG 341472-2009, Funder ID. 10.13039/501100000038)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix
Using the energy-equivalent homogenization technique, the total strain energy of the cable-harnessed plate system with periodic cable wrapping pattern was obtained as [34]:
And, the kinetic energy was obtained as [34]:
where the coefficients \({H}_{i}\ (i=1\ to\ 13)\) and \({K}_{1}\) are mentioned for both the patterns as follows:
Zigzag Pattern
In these above mentioned coefficients for the zigzag pattern, the variables \({N}_{x}\), \({N}_{y}\), and \({N}_{xy}\) are written as [34]:
where \(m\) is the number of fundamental elements in each row and \(n\) is the number of rows of repeating fundamental elements in the zigzag pattern. Additionally, the wrapping angle \(\theta\) can be calculated for zigzag pattern as
Diagonal Pattern
In the above mentioned coefficients for the diagonal pattern, the variables \({N}_{x}\), \({N}_{y}\), and \({N}_{xy}\) are written as [34]:
where \(m\) is the number of fundamental elements in each row and \(n\) is the number of rows of repeating fundamental elements in the diagonal pattern. Additionally, the wrapping angle \(\theta\) can be calculated for diagonal pattern as
Rights and permissions
About this article

Cite this article
Agrawal, P., Salehian, A. Dynamic Analysis and Experimental Validation of Periodically Wrapped Cable-Harnessed Plate Structures. Exp Mech 62, 909–927 (2022). https://doi.org/10.1007/s11340-022-00838-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11340-022-00838-6