
Abstract
The sampling of extraterrestrial bodies is a critical technology in deep space exploration. Analyzing these samples allows researchers to uncover valuable information about the composition, structure, and evolutionary history of these celestial bodies. Compared to alternative sampling methods such as shoveling and grinding, drilling offers the advantage of obtaining larger sample volumes while preserving sample integrity. Furthermore, it enables sampling at various depths and terrains, making it an essential approach for acquiring samples from extraterrestrial environments. However, drill-based sampling devices are versatile, and their working principles and methods vary across different exploration missions and celestial bodies’ environments. This paper provides a comprehensive investigation into the progress made in drill-based sampling devices for extraterrestrial bodies. It begins by introducing the environmental and geological characteristics of the target celestial bodies, analyzing how these factors impact the structural design and operational parameters of sampling devices. The research then reviews drill-based sampling devices used in previous extraterrestrial exploration missions and examines the latest advancements in drill-based sampling technology. Based on different drilling depths, this study categorizes drill-based sampling devices into seven groups: small drills, pneumatic surface drills, single-rod drills, multi-rod drills, pneumatic deep probes, cable-based drills, and terrestrial ice penetration drills. It also provides an analysis of the operational characteristics, advantages and disadvantages of these seven types of drill-based sampling devices. The paper further outlines the technical difficulties and challenges encountered during the sampling of extraterrestrial bodies and concludes by presenting prospects for the future development of drill-based sampling technology for extraterrestrial bodies.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Sample collection from extraterrestrial bodies is crucial for gaining deeper insights into the origin of the universe, potential for life, Earth’s history, and space resource utilization (Bar-Cohen and Zacny 2021). Analyzing these samples can unveil the processes of solar system formation and evolution, explore the origins of life, comprehend the historical changes of Earth, and lay the groundwork for future space resource exploitation and technological innovations (Zhang et al. 2019). Samples collected from the surfaces of extraterrestrial bodies are often subjected to weathering, space radiation, and other factors that make it challenging for microorganisms to survive and for signs of life to be preserved, thereby limiting the acquisition of comprehensive scientific information (Bar-Cohen and Zacny 2009). Considering the potential for contamination of samples obtained from the surface of celestial bodies during the collection process, subsurface soil samples at greater depths contain a superior stratigraphic record and scientific insights than surface samples. These subsurface samples can better reveal the internal structure and evolutionary history of extraterrestrial bodies. Sampling physical geological samples at depths of tens or even hundreds of meters can be necessary (Glass et al. 2014b; McKay et al. 2013).
Drill-based sampling technology offers substantial advantages compared to other sampling methods (Zhang et al. 2022b). Drill-based sampling systems can be intelligently adjusted based on geological conditions and sampling requirements, allowing adaptability to diverse geological environments. During the sampling process, the drilling devices can dynamically adjust operational parameters to address unknown and complex conditions, enhancing the success rate and efficiency of sample collection. Drill-based sampling technology can penetrate deep underground, facilitating in-depth exploration of the internal structure and composition of extraterrestrial bodies, and enabling the acquisition of samples from various depths. This approach yields a diverse range of sample types, including core samples, frozen soil, and subsurface soil, enabling researchers to access a wider array of material compositions and structural characteristics, thereby comprehensively understanding the properties and evolution of extraterrestrial bodies. Moreover, drill-based sampling technology can effectively preserve the integrity of collected samples during the sampling process. Precise control and monitoring help minimize volatilization or degradation of samples, ensuring that the collected samples retain their original form and properties, thus providing accurate analytical data.
Humanity has accomplished numerous missions using drill-based sampling equipment to collect samples from extraterrestrial bodies. In the 1970s, the American Apollo 15-17 missions utilized drilling devices operated by astronauts for sampling, achieving maximum drilling depths of up to 3050 mm (Zhang et al. 2022a). The Soviet Luna 16, Luna 20 and Luna 24 missions employed unmanned drilling machines for sample collection, retrieving 325 g of samples (Harvey 2006). China’s Chang’E-5 mission, launched in November 2020, successfully conducted both deep drilling and shallow surface sampling tasks on the Moon, achieving a drilling depth of approximately 1 m and returning with 1731 g of samples, marking the third successful lunar sample return mission (Xiao et al. 2021).
For Mars exploration, humans have not yet completed a sample return mission. Landing on Mars and performing in-situ analysis of Martian soil samples is a prevailing and effective method for understanding Martian composition (Reiter et al. 2005). In 2008, the Phoenix Mars lander dug up frozen water samples using the Icy Soil Acquisition Device (ISAD), confirming the presence of water on Mars (Smith et al. 2008). In 2013, the Curiosity Mars rover heated fine-grained soil samples collected by Sample Acquisition/Sample Processing and Handling (SA/SPaH) to 835 °C, resulting in the decomposition of water, CO2, sulfur compounds, and other substances, marking the first measurement of water content in Martian soil (Leshin et al. 2013). Europe’s EXO Mars mission plans to drill up to 2 m on Mars, exploring the habitability of landing sites and searching for evidence of life (Vago et al. 2017). Currently, the Mars 2020 sample return mission is underway in collaboration between NASA and ESA, with the Perseverance Rover leading the mission on the Martian surface, conducting drill-based sampling activities. It is expected that Mars samples will be returned to Earth in the early to mid-2030s (Farley et al. 2020).
Drill-based sampling, in conjunction with in-situ resource utilization technology, represent a prominent trend in the future advancement of drilling devices. By collecting samples and processing them to extract resources such as water or oxygen, the aim is to reduce the cost of space missions and dependence on Earth’s resources (Anand et al. 2012). NASA’s commercial lunar payload services (CLPS) involve the NOVA-C lander and Volatiles Investigating Polar Exploration Rover (Viper) both employing the regolith and ice drill for exploration of new terrains (TRIDENT) for sampling in the lunar polar regions, conducting in-situ resource utilization experiments (Zacny et al. 2023). In the next 5-10 years, Russia plans to launch the Luna 26 and Luna 27 spacecraft to continue exploring and analyzing lunar rocks and soil in the lunar polar regions (Tretyakov et al. 2020). China is set to implement the Chang’E 6-8 missions within the next decade, conducting investigations and sampling at the lunar south pole and far side, carrying out lunar resource utilization experiments, and establishing lunar research stations (Zhang et al. 2019). Furthermore, the potential presence of subsurface oceans on celestial bodies like Europa, Enceladus, and Titan has spurred humanity toward even more ambitious endeavors. The United States has plans to launch the Enceladus Orbilander probe in the early 2030s, aiming to collect surface samples and further investigate its potential habitability (MacKenzie et al. 2021). The Dragonfly mission, scheduled for 2034, is set to land on Titan to explore its surface for signs of habitability (Sotin et al. 2021).
The first section provides an overview of extraterrestrial drill-based sampling technology, encompassing the significance of extraterrestrial sampling, the advantages of drill-based sampling, a historical perspective on exploration, and upcoming sampling missions by various countries. Subsequent sections will delve into four areas: the extraterrestrial environment, drill-based sampling devices, technical challenges in extraterrestrial drill-based sampling, and future directions for development, as shown in Fig. 1. Section 2 provides an overview of the mechanical characteristics of surface weathering materials on celestial bodies and the stratigraphic structure of their surface layers. In Sect. 3, a comprehensive review of the drill-based sampling apparatus employed in past exploration missions is provided. Recent advancements in contemporary drill-based sampling technologies are surveyed, and these technologies are classified based on their distinctive attributes. Addressing the technological challenges encountered in extraterrestrial sampling, Sect. 4 conducts an in-depth analysis. Furthermore, Sect. 5 outlines the anticipated developmental trajectories in extraterrestrial drill-based sampling technologies. The paper culminates with a concise summation of findings and conclusions in Sect. 6.

Summary of drill-based sampling techniques for extraterrestrial bodies
2 Environments of Extraterrestrial Bodies
The geology of extraterrestrial objects can be very different from that of the Earth. Despite the considerable strides made by humanity in the realm of exploration and sample collection, our comprehension of the physical attributes adorning the surface layers of celestial bodies remains notably constrained. It’s important to highlight that, after the scrutiny of the Moon, Mars, and assorted asteroids, our gaze now shifts towards celestial bodies that may have subsurface oceans such as Enceladus and Titan. When juxtaposed against the relatively well-explored terrains of the Moon and Mars, our grasp of the surface characteristics exhibited by celestial orbs like Enceladus and Titan remains conspicuously nascent. The geological and environmental topographies inherent to celestial bodies exert a profound influence on the design and functionality of sampling apparatuses. The limited knowledge about the surface features of celestial entities precipitates many uncertainties, thus intricately interweaving complexity into the fabric of sampling device design and development (Zhang et al. 2021). Therefore, it is essential to have a comprehensive understanding of the environments and geology of celestial bodies, as this forms the foundation for the smooth design of sampling devices.
2.1 Geological Features
Most of the lunar surface is covered by loose lunar soil with an average thickness of 4 to 15 m, beneath which lies the solid lunar bedrock (Heiken et al. 1991). Currently, the sampling depths of the United States’ Apollo missions, the former Soviet Union’s Luna missions, and China’s Chang’ E-5 mission have all remained within this range. Consequently, lunar soil can be considered the primary target of current lunar drilling missions. In the process of lunar soil sampling, it is highly susceptible to disturbance, and such disturbance can lead to significant changes in its physical and mechanical properties. Relevant experiments have demonstrated that within a depth range of 800 mm, lunar soil can exhibit nearly 40% relative density variation under the influence of its weight alone (Heiken et al. 1991). Research conducted by China University of Geosciences indicates that neglecting the changes caused by simulated lunar soil disturbance and treating its properties as constants, the error fluctuates between 30% and 85% in terms of torque calculation results compared to measured outcomes (Li et al. 2014). Similarly, experiments conducted by the Colorado School of Mines in the United States have shown that using seven conventional soil mechanics models with constant lunar soil properties to calculate the reactive force curve yields results inconsistent with the measured values of simulated lunar soil (King et al. 2011). Therefore, the physical and mechanical properties of lunar soil are one of the main influencing factors for lunar drilling-related tasks. This paper summarizes the lunar regolith’s physical properties that affect drilling machinery, as illustrated in Table 1.
Currently, no country has completed a Mars sample return mission, making it challenging for researchers to directly access the precise physical and mechanical properties of Martian soil. In-situ measurements have emerged as a crucial approach to obtain Martian soil’s mechanical characteristics. The inherent weight constraints during launch have hindered the incorporation of dedicated instruments for measuring the physical and mechanical attributes of Martian soil on the rovers currently in orbit around Mars. As an alternative, these rovers rely on data inversion from contact components, including wheels, sampling shovels, and footpads, to compute parameters like compression, shear strength, and bulk density of Martian soil (Shen et al. 2023). This paper provides an overview of the physical and mechanical properties of Martian soil as ascertained by lander missions on the Martian surface, as depicted in Table 2.
It is noteworthy that, in addition to surface soil, water ice will be one of the primary targets for upcoming deep space sampling missions. The search for ice-water mixtures in extraterrestrial objects holds immense significance for deep space exploration. These samples serve as crucial indicators for assessing the potential habitability and sustaining life beyond Earth. By prospecting for ice-water mixture content, scientists can unlock valuable resources essential for in-situ resource utilization, thus reducing the reliance on Earth-supplied provisions and ensuring the sustainability of deep space missions. Moreover, the study of ice-water mixtures offers insights into planetary evolution, shedding light on the geological history and environmental conditions of celestial bodies. These samples provide an important opportunity to enhance our understanding of the formation and development of planets, moons, and other extraterrestrial objects. To date, there is also a lack of precise and definitive data on the mechanical and physical properties of extraterrestrial regolith and ice-water mixtures. Nonetheless, with upcoming missions such as NASA’s NOVA-C lander and VIPER rover landing at the lunar poles, as well as ongoing exploration efforts by countries like Russia and China, there will be a deeper understanding of the mechanical and physical properties of surface ice-water mixtures on extraterrestrial bodies.
2.2 Stratigraphic Structure
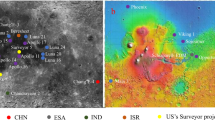
Currently, humanity has achieved remarkable progress in probing the surface structures of both Mars and the Moon, as shown in Fig. 2. In 2019, Chang’E-4 landed in the Von Kármán crater within the South Pole–Aitken Basin on the Moon. The Yutu-2 lunar rover explored and identified three distinct geological units within a depth range of 40 m (Li et al. 2020). In 2021, The Zhurong rover conducted in-situ radar investigations in Utopia Planitia on Mars, revealing the detailed shallow-layered structure of the region (Li et al. 2022a).

Surface structures of the Moon and Mars. (a) Lunar surface structure: 1-Lunar surface exploration by Yutu-2; 2-Yutu-2’s path across Von Kármán Crater; 3-Distribution of lunar surface layering detected by Yutu-2. (b) Martian surface structure: 1-Martian surface exploration by Zhurong rover; 2-Zhurong’s traverse in Utopia Planitia; 3-Martian surface structure revealed by Zhurong’s exploration. (Courtesy authors, Chinese Academy of Sciences)
It is worth mentioning that in the coming decade or possibly within the next twenty years, in addition to the Moon, Mars, and smaller celestial bodies, there are intended missions to land on the surfaces of Europa, Enceladus, and Titan (National Academies of Sciences 2022). In 2024, NASA is planning the launch of the Europa Clipper mission, which aims to explore Europa’s orbit to ascertain its potential habitability (Howell and Pappalardo 2020). The year 2027 will see the launch of the Dragonfly mission, involving a rotorcraft lander, to explore Titan comprehensively through multiple sampling locations, thereby evaluating its suitability for life (Lorenz et al. 2018). Subsequent to 2038, NASA intends to launch the Enceladus Orbilander mission, which will carry out orbital observations of Enceladus and undertake a landing and sampling campaign on its surface, thus investigating the presence of life on Enceladus (MacKenzie et al. 2021). These bodies, unlike the Moon and Mars, are known to possess subsurface oceans, rendering them prime candidates for potential life, as shown in Fig. 3.

Interior structures of Io, Europa, Enceladus and Titan. (Courtesy authors, STScI)
2.3 Planetary Soil Simulation
In the present day, the collected samples of lunar regolith are notably limited. Currently, only the United States, the former Soviet Union, and China have achieved lunar soil sampling and return missions, contributing to the available lunar primitive samples, which are currently less than 385 kg (Li et al. 2017). This quantity proves insufficient to satisfy the substantial research requirements of various nations in the context of lunar exploration. As a result, researchers from many countries have developed simulated lunar regolith samples that exhibit fundamental characteristics similar to lunar soil. Table 3 summarizes the simulated lunar regolith developed by different countries in recent years, along with their physical properties.
Despite over 40 Mars exploration missions carried out by humanity in the past five decades, the return of Martian soil samples remains unrealized (Yao et al. 2021). Compared to lunar samples, Martian soil samples are even scarcer. Presently, the United States has successfully conducted multiple Mars landing missions, with relatively mature simulated Martian soil technologies (Perko et al. 2006). ESA has also engaged in related work, accumulating a wealth of experience (Gouache et al. 2011), and China has initiated research on simulated Martian soil (Zeng et al. 2015). Table 4 summarizes the simulated Martian soil developed by different countries in recent years, along with their physical properties.
3 Advances in Extraterrestrial Drills
This section begins with a review of previous space missions that have carried drill-based sampling devices. It also provides a comprehensive overview of the current development of drill-based sampling devices, categorizes them according to different sampling depths, and evaluates their structural characteristics and modes of operation.
3.1 Planetary Drill-Based Sampling Missions
3.1.1 Lunar Drills
As the celestial body closest to Earth, the Moon is the most accessible target for extraterrestrial sample collection missions conducted by nations worldwide. Figure 4 and Table 5 summarize drill-based sampling devices used in previous lunar exploration missions.

Lunar drill-based sampling devices. (a) Apollo program: 1-Astronauts used ALSD to sample lunar subsurface soil; 2-ALSD; 3-Power head; 4-Accessories; 5-Treadle; 6-Rod and bit (b) Luna program: 1-Luna 16 lander; 2-Automated drill; 3-Luna 24 lander; 4-LB-09; 5-Samples stored in a sealed container after wrapping. (c) Chang’E-5 Mission: 1-Chang’E-5 lander with sampling apparatus; 2-Hollow-core drilling principle using flexible hose; 3-Drill bit; 4-Samples wrapped and stored. (Courtesy authors, NASA, USSR Academy of Sciences, and CNSA)
During the early 1970s, NASA’s Apollo 15-17 missions employed the Apollo Lunar Surface Drill (ALSD) for sampling tasks (Compton 1989). The ALSD was operated manually by astronauts and powered by batteries, with a standard operational power output of 430 W. Astronauts employ the ALSD to efficiently complete the drill-based sampling processes within a concise 15-minute timeframe. Notably, the ALSD featured a design comprising interconnected hollow drill rods. These drill rods were compactly packaged to align with the size constraints of space missions, achieving a necessary reduction in overall dimensions. The comprehensive drill package encompassed four fundamental constituents: a drill rod assembly, a drill motor powerhead, batteries, and supplementary accessories. During the process of drill-based sampling, astronauts sequentially attached drill rods to achieve increasing depths (Zacny et al. 2013d). The requisite drilling pressure was sourced from the combined weight of the astronauts and the ALSD. Specifically, the powerhead of the ALSD drill weighed 4000 g and was furnished with a direct current brushed motor, augmenting its functionality with rotational impact capabilities (Allton 1989). However, owing to a limited understanding of the mechanical and physical attributes of lunar soil at that juncture, along with the absence of spiral grooves at the interconnection points of the drill rods, the capacity for efficient debris removal was compromised. Consequently, the achieved drilling depth during the Apollo 15 mission fell short of initial expectations, with astronauts encountering difficulties in the process of removing the drill bit. In light of these challenges, subsequent improvements were introduced to the ALSD apparatus for employment in the Apollo 16 and Apollo 17 missions (Pitcher 2016). Notable enhancements included the integration of continuous spiral drill bits to facilitate proficient soil clearance, alongside the incorporation of a treadle mechanism intended to streamline the removal of drill rods. Emanating as a handheld drill-based sampling instrument specially tailored for astronaut usage, the ALSD design prioritized lightweight attributes and intuitive operational procedures, thereby significantly mitigating the workload borne by astronauts.
In contrast to the astronaut sampling approach of the Apollo missions, the Soviet Union deployed autonomous drilling machines to collect samples. The Luna 16 lander featured an automatic drill, mounted at the tip of a robotic arm, designed for extracting lunar rock and soil samples. This drill was a hollow spiral auger capable of extracting lunar rock and loose soil samples (Harvey 2006; Zacny et al. 2013d). The automatic drill achieved an actual drilling depth of 350 mm, resulting in a sample collection of 101 g. Once sample collection was complete, the lunar soil was transferred to sealed containers for preservation. The drilling apparatus of Luna 20 was an improved version of the one used in Luna 16, although both essentially served as end-effectors attached to the robotic arm. During the sampling process of Luna 20, encountering hard rocks caused the electric motor to overheat. To prevent damage to the sampling equipment, Luna 20 terminated the sampling operation prematurely after a drilling time of 4 min 34 s. Furthermore, a significant amount of soil was lost during the sample transfer process, resulting in a final acquisition of 55 g of lunar soil samples (Anttila 2005). The sampling devices of Luna 16 and Luna 20 relied solely on the gravity of the drilling apparatus to provide drilling pressure, limiting their ability to collect samples from deeper lunar layers. This design resulted in a low core recovery rate and a relatively small sample size, making it challenging to preserve the original stratigraphic information of the lunar soil. In contrast, Luna 24 utilized a guided drilling apparatus, LB-09, which differed from the installation method of the drilling apparatus used in Luna 16 and Luna 20. The drill head of Luna 24 was mounted on the side of the spacecraft and drilled at a 30° angle perpendicular to the lunar surface, utilizing the weight of the lander to provide drilling pressure. The drilling apparatus had a working stroke of 2500 mm, and the drill rod contained a hose to protect the retrieved lunar core. The drilling operation extended over a duration of one hour, culminating in a sampling depth of 2.25 m. During this process, a core sample weighing 170.1 g was successfully procured (Slyuta 2021; Basilevsky et al. 2013). Additionally, LB-09 was equipped with an integrated soft tube mechanism, facilitating the collection of samples directly into the tube, which was subsequently wound and sealed for storage. As a result, the sample preservation capability of Luna 24 is remarkably improved compared to that of Luna 16 and Luna 20.
Comparing the lunar soil sampling methods of the Apollo and Luna programs, both used hard alloy drill bits and hollow drilling devices, using percussion and rotation for drilling. The main difference is that the Apollo missions used manual drilling for sampling, while the Luna missions used automated sampling with ground-based operation control. However, due to limited knowledge of lunar geology, the manual drilling approach of the Apollo missions showed better adaptability to the lunar environment and improved operability. As a result, the Apollo missions achieved greater drilling depths and recovered greater quantities of lunar soil samples than the Luna missions.
The Chang’E-5 probe, China’s first attempt at extraterrestrial sample collection, successfully landed on the Moon in December 2020 (Xiao et al. 2021). Chang’E-5 carried two sampling devices for collecting lunar soil samples: a shovel excavator for surface sampling and a drill for subsurface drilling and collection. The drilling mechanism of Chang’E-5 featured an outer spiral and an inner hollow, forming a three-layer structure with a core collection bag. The outer tube was a hollow pipe equipped with spiral blades, allowing for the transport of drill cuttings and heat dissipation. The inner rod is a thin-walled hollow tube designed to protect the original stratigraphic information of the lunar soil. The innermost component is a core collection bag made of KEVLAR-49/9 000 material, known for its high flexibility and strength. The drill weighs 40 kg and has a power output exceeding 1000 W. During the sampling process, the outer drill rod rotates while the inner rod remains stationary relative to the lunar soil. This downward movement of the inner rod allows the lunar soil to enter the core collection bag. After the descent, the core collection bag is tightened by two ring-shaped closure devices made of highly elastic memory alloy. Subsequently, the sample extraction mechanism at the top begins rotating to wind the core collection bag, shaping it in the process for easier insertion into the primary sealing device (Pang et al. 2012; Jiang et al. 2022). However, during the drilling process, the drill encountered hard rocks, resulting in a drilling depth of only 100.1 cm instead of the planned 200 cm. As a result, the sample quantity did not meet the expected target, and a total of 1731 g of samples were collected through both sampling methods (Zheng et al. 2022).
3.1.2 Mars Drills
Mars is one of the next significant exploration targets following lunar exploration. Drill-based sampling devices have been incorporated in American and European Mars exploration missions. Figure 5 and Table 6 provide an overview of the drill-based sampling equipment employed in prior Mars exploration endeavors.

Mars drill-based sampling devices. (a) Mars Express: 1-Beagle-2 lander; 2-Sampling apparatus of Beagle 2; 3-Corer/Grinder; 4-Planetary Underground Tool. (b) Phoenix: 1-Phoenix lander; 2-ISAD; 3-Drill bit in ISAD. (c) Mars Science Laboratory: 1-Curiosity rover; 2-SA/SPaH; 3-Dust removal device. (d) InSight: 1-InSight lander; 2-HP3; 3-Heat flow probe. (e) Mars 2020: 1-Perseverance rover; 2-SCS; 3-Drill bit; 4-Sample storage tubes. (Courtesy authors, NASA, and ESA)
The Mars Express, launched by ESA in 2003 and carrying the Mars-Beagle 2 lander, was the world’s first mission to use a mole sampling device for exploring Mars (Chicarro et al. 2004). Unfortunately, the lander encountered a malfunction, and the sampling device did not operate successfully on the planet’s surface (Richter et al. 2002). The lander was equipped with two types of sampling devices. One of the sampling devices used is the Corer/Grinder (C/G), which is located at the end of the robotic arm and operates in a rotating impact mode, performing both grinding and sample collection functions. During sampling, the C/G applies a force of 6 N to remove the weathered surface layer, creating a flat area with a diameter of 30 mm and a depth of 3 mm. The coring bit of the sampling mechanism has a diameter of 2.5 mm, allowing for a maximum drilling depth of 7 mm. Therefore, the C/G is capable of obtaining samples from a depth of up to 10 mm beneath the original rock surface (Richter et al. 2002). Another sampling device is the PLanetary Underground Tool (PLUTO), deployed through the robotic arm. PLUTO can obtain soil from an underground 10 cm to a depth of 1.5 m and collect soil into a cavity at its tip. There is a temperature sensor at the end of the Mole, which can record the change of temperature with depth and time during drilling. Internally, the Mole incorporates a compressed spring-driven impact hammer system, continually generating impacts through a small electric motor-driven sliding hammer system, enabling it to penetrate loosely or moderately consolidated soil. Mole connects to the Mars rover through cable. The Mole operates in two modes: vertical drilling and horizontal impact. By placing the Mole horizontally, it traverses the surface by continuous forward shock. If it encounters rocks, the impact direction is changed, redirecting it into the subsurface soil (Pullan et al. 2004; Richter et al. 2004).
The Phoenix Lander, launched by NASA in August 2007, was tasked with exploring the polar regions of Mars and collecting and analyzing frozen soil samples for the presence of water (Chu et al. 2008; Bonitz et al. 2008). The ISAD was located at the end of the robotic arm and served as the first device to collect frozen soil samples from the Martian polar surface and transfer them to the analyzer. The ISAD is a comprehensive sampling device that combines shovel excavation and drilling. It consists of two compartments. The front compartment of the ISAD functions as a shovel for scraping or excavating surface soil samples, capable of collecting up to 310 cm3 of loose soil with a maximum excavation depth of 50 cm. The rear compartment of the ISAD contains a high-speed, low-torque cutting bit made of tungsten carbide (Chu et al. 2008). Cutting bit are drilled to a depth of a few millimeters to a centimeter and can penetrate the hard frozen soil surface to collect frozen soil. When sampling, the working time of the cutting bit is 30 to 60 seconds each time, and the rock debris is collected in the front cavity through the motion of the mechanical arm. ISAD has a built-in temperature sensor to provide temperature feedback. In 2008, the ISAD successfully collected frozen soil samples, confirming the presence of water on Mars (Hecht et al. 2009). The ISAD exhibits versatile functionality by combining shovel excavation and drilling methods, adapting to different sampling objectives. It serves as a prominent application example of sampling technology. However, it may disrupt the original layering structure of the samples and is limited in terms of sampling depth and quantity.
The Mars Science Laboratory (MSL), carrying the Curiosity rover, was launched by NASA in November 2011 (Grotzinger et al. 2012). The SA/SPaH is the first sampling device deployed on Mars to collect subsurface rock and soil samples from the Martian surface. It utilizes drilling for obtaining internal rock samples at depths of 20-50 mm or employs scooping for collecting surface-weathered layer samples, which are subsequently processed into powdered particles and delivered to the interior of the Mars rover for scientific analysis (Anderson et al. 2012). The SA/SPaH consists of two main components: the robotic arm and the turret. The robotic arm is responsible for tasks such as inspection, sample acquisition, processing, and transportation. The turret structure is located at the end of the robotic arm and has a diameter of 60 cm. It houses three devices for sample collection and preparation: the Powder Acquisition Drill System (PADS), the Dust Removal Tool, and the Collection and Handling for Interior Martian Rock Analysis. PADS is designed to collect powdered samples from the interior of rocks and consists of a drill, a drill bit assembly, and bit boxes. The drill has a diameter of 16 mm and can reach a maximum depth of 50 mm, excluding the top 2 cm. It is planned to obtain 81 samples. The drill is a powder drill, which generates crushed rock samples during the drilling process. These crushed rock samples are then transferred to analytical instruments without the need for a separate crushing step (Jandura 2010).
Launched by NASA in 2018, the InSight mission carried the Heat Flow and Physical Properties Package (HP3) to measure planetary heat flow and investigate the internal structure of Mars (Banerdt et al. 2020). The Mole, a small, low-speed penetrator, is equipped with an internal hammering mechanism that operates akin to a self-propelled nail. The hammer is accelerated by a spring and cyclically strikes an anvil connected to the Mole’s shell, propelling its forward movement. The recoil force is absorbed partially by friction on the shell and partly by braking springs. The mechanical distribution of mass within the device and the anisotropic friction on the Mole function as a mechanical diode, guiding its preferential forward motion. At the rear of the Mole is a scientific tether containing embedded heaters and temperature sensors, used to measure the thermal properties of Mars’ interior. By extending the length of the scientific tether, the Mole’s maximum exploration depth reaches up to 5 m. The Tether Length Monitor and Static Tiltmeter measure the Mole’s descent path (Spohn et al. 2018, 2022a). During the drilling process, a layer of soil adhered to the mole’s outer shell, causing insufficient friction to counterbalance the recoil force of the hammer mechanism. Subsequently, the mole penetrated further with the assistance of friction applied using the scoop at the end of the robotic Instrument Deployment Arm and by direct support from the latter. Eventually, the mole’s tip reached a depth of approximately 37 cm, bringing the mole’s rear end below the surface by 1-2 cm (Spohn et al. 2022b). This mole-type probe, connected to the Mars lander via a tether, exhibits novel structural and sampling detection methods, with expectations of significant sampling depth. However, the operational process of this mole-type probe is significantly constrained by the true mechanics of Martian soil, making the guaranteed sampling depth challenging to achieve.
Launched in 2020 by NASA, Perseverance stands as the most recent addition to the Martian rover fleet and plays a pivotal role in the Mars 2020 mission (Backes et al. 2012). Its principal objectives encompass the investigation of potential traces of past life within extraterrestrial habitats that could have supported life, as well as the execution of sample collection, processing, sealing, and caching tasks, culminating in the eventual return of Martian specimens to Earth (Farley et al. 2020). Unlike MSL, which only necessitated the replacement of worn drill bits, the Mars 2020 drill bits are systematically exchanged as an essential component of the Sample Caching System (SCS), with each sampling and processing operation entailing a drill bit replacement (Moeller et al. 2020). The SCS offers two drilling modes: rotary percussion drilling and rotary drilling. Software-driven adaptive drilling algorithms dynamically modulate drill pressure, spindle speed, and impact frequency, ensuring precise control over the mechanical drilling process, and thereby safeguarding sample integrity during collection. Perseverance is equipped with 43 sample tubes, of which 38 are specifically designated for acquiring rock and regolith specimens, while the remaining 5 serve as witness tubes, employed to monitor any potential contamination originating from the rover (Farley et al. 2020). The SCS seamlessly transfers gathered rock and regolith samples into individual ultra-clean and aseptic tubes, meticulously documenting and assessing the volume of each acquisition before hermetically sealing each container. The Sample Caching System on Perseverance epitomizes the Jet Propulsion Laboratory’s (JPL) most stringent cleanliness standards for a sampling apparatus, a measure implemented to mitigate the risk of sample contamination. Presently, Perseverance is actively engaged in its sampling mission on Mars, with aspirations of achieving a Mars sample return mission anticipated to occur during the early to mid-2030s (Witze 2023).
3.1.3 Drill-Based Sampling Devices for Other Celestial Bodies
In addition to the Moon and Mars, humans have launched probes to sample Venus, Phobos, and small celestial bodies. Figure 6 provides a summary of the drill-based sampling devices utilized in past exploration missions to Venus, small celestial bodies, and Phobos.

Drill-based sampling devices for other celestial bodies. (a) Venus drill-based sampling devices: 1-Venera 13/14; 2-GZU drill. (b) Comet drill-based sampling devices: 1-Philae lander; 2-SD2; 3-Philae lander harpoon; 4-MUPUS. (c). Asteroid sampling devices: 1-Hayabusa; 2-Horn sampler; 3-OSIRIS-Rex; 4-TAGSAM. (d) Phobos drill-based sampling devices: 1-Phobos 1/2 lander; 2-Hopper; 3-Phobos-Grunt; 4-CHOMIK. (Courtesy authors, USSR Academy of Sciences, ESA, JAXA, NASA and Roscosmos)
The harsh environment of Venus requires the sampling device to operate at high temperatures of 500 °C and 100 bar atmospheric pressure. Venera 13/14, launched by the former Soviet Union in 1981 to explore Venus, carried the GZU Drill sampling gear, which drilled and shoveled soil samples, and took advantage of the high atmospheric pressure on the surface of Venus to complete the sample delivery, with a total time of 200 s for drill-based sampling (Zacny et al. 2017; Barmin and Shevchenko 1983; Anttila 2005).
To explore comet 67P/Churyumov-Gerasimenko, ESA launched the Rosetta comet probe in 2004, which carried the Philae lander. Philae was the first lander to land on a comet and was equipped with the Sampling, Drilling, and Distribution device (SD2) capable of drill-based sampling on the comet’s surface (Glassmeier et al. 2007). The SD2 is a 4-degree-of-freedom robotic device with a mass of approximately 5.1 kg. It has an average standby power of 1.5 W, an average drill-based sampling power of 6 W, and a maximum power of 14.5 W (Finzi et al. 2007). Due to a limited understanding of the mechanical properties of the comet’s surface, a polycrystalline diamond material was employed for the drill bit. The drill-based sampling functions were integrated within a spiral drill mechanism to prevent the collapse of boreholes during tool activation. The SD2 was planned to collect samples at a depth of 230 mm, with a targeted sample volume of 10-40 mm3. After sample collection, the probe would conduct in-situ scientific analysis experiments (Magnani et al. 2015). Furthermore, Philae was equipped with the MUPUS probe, instrumental in gauging the thermal conductivity of the comet’s surface temperature at depths of up to 40 cm beneath the comet’s surface (Grygorczuk et al. 2009). MUPUS featured a hollow tube crafted from glass fiber composite material, housing 16 annular thermal sensors affixed to the inner tube wall. Unfortunately, a malfunction in the PHILAE lander’s harpoon system resulted in an operational failure during the lander’s descent, rendering it unable to carry out subsequent tasks.
Unlike the Rosetta mission, Hayabusa, Hayabusa 2, and OSIRIS-Rex utilized the Touch-and-Go method for asteroid sampling. In this sampling method, the spacecraft briefly contacts the surface of the asteroid, during which the sampling device performs the sampling task. Subsequently, the spacecraft departs with the collected samples. Hayabusa was the first spacecraft to take samples from an asteroid and was also the first mission to successfully land and take off from an asteroid (Yoshikawa et al. 2021). The Horn sampler mounted on the Hayabusa spacecraft employed a splashing sampling technique. During the contact between the spacecraft and the asteroid’s surface, projectiles were used to impact the surface, causing particle splashes from the surface soil or large rocks. These splashed particles were then directed into the sample container through a conical shield for storage. Its successor, Hayabusa 2, inherited the design of its predecessor and successfully delivered a 5.4 g asteroid sample to Earth in 2020 (Sawada et al. 2017). The sampling device equipped on Osiris-Rex is the Touch-And-Go Sample Acquisition Mechanism (TAGSAM), comprising a sampler and a mechanical arm (Bierhaus et al. 2018). It utilizes gas jets to agitate and collect weathered particles. The sampler doubles as a sample container, and upon completion of sampling, both the sampler and the samples are stored in the return capsule for the journey back to Earth. In 2023, OSIRIS-Rex accomplished a sampling mission on the Bennu asteroid, returning 121.6 grams of asteroid samples to Earth, marking a significant milestone in deep space exploration.
The Phobos 1/2 probes, launched by the Soviet Union in July 1988, carried a lander called “Hopper” with a mass of 41 kg, capable of hopping on the surface of Phobos. The Hopper was equipped with a drill-based sampling device to collect and analyze soil samples from multiple sampling sites (Sagdeev and Zakharov 1989). Unfortunately, the sampling mission was not successful (Sagdeev and Zakharov 1989; Ulamec et al. 2011). In 2010, CBK PAN developed CHOMIK for the Russian Phobos-Grunt mission, which is a hammering penetrator with sampling ability (Grygorczuk et al. 2011). The size of the CHOMIK is 34 cm × 11 cm × 10 cm, heavy 1.4 kg, the average power consumption is 2 W, and the maximum power consumption is 4 W. The working principle of the CHOMIK instrument is similar to the MUPUS penetrator device in the Rosetta task. The equipment can sample loose topsoil and measure the thermodynamic and mechanical properties of the soil. However, the Phobos-Grunt mission failed to deliver the lander to the Phobos’s surface.
3.2 Advancements in Drill-Based Sampling Device Development
3.2.1 Small Drills
Small drills are suitable for shallow soil or rock core samples at depths of 0-10 cm. With a high degree of integration and a compact structure, small drills are well-suited for spaceflight applications. In the early stages of exploring new celestial bodies, using small drills instead of medium or large-sized drilling devices can mitigate risks and enhance mission success rates. Small drills offer high sampling resolution and low power consumption, albeit with a limited sample volume. Furthermore, small drills can be integrated into robots designed to navigate extreme terrains, facilitating an exploration of diverse and intricate landscapes and enabling the collection of more valuable samples. As a result, small drills hold significant potential for future planetary exploration and sampling missions. Figure 7 shows some representative small drills.

Small drills. (a) Nano drill and Powder drill: 1-Axel rover; 2-Axel rover detaching front half for exploring extreme terrain; 3-Nano drill; 4-Powder drill. (b) Mini-Corer deployed on a small mars rover for sampling. (c) Small UAV carrying Micro drill for sampling. (d) ROPEC and its components. (e) The coring abrading tool: 1- CAT deployed on a mars rover for sampling; 2-Drill bit and end effector. (Courtesy authors, Honeybee Robotics)
To explore extreme terrains on the Moon or Mars, such as the sides of impact craters, volcano walls, and steep slopes, NASA has conceived the Axel rover. The rover is divided into two parts during exploration: the front part detaches from the main body and descends steep slopes, while the rear part lowers its chassis and remains fixed on the ground. These two components are linked by a tether (Nesnas et al. 2012). Building upon the Axel Rover, Honeybee Robotics has developed two miniature drills installed internally in the Axel Rover (Zacny et al. 2013b). The Nano Drill is a lightweight and low-power sampling tool, weighing only 1.05 kg and measuring 13 cm × 10 cm × 6 cm in size. It incorporates the eccentric tube break-off system and the BigTooth bit, making it suitable for core sample collection. On the other hand, the Powder Drill is designed for shallow sampling of approximately 2 cm, making it more suitable for the surface layer and debris sample collection.
The Miniature Rock Coring and Rock Core Acquisition and Transfer System (Mini-Corer), designed by Honeybee Robotics (HB) in 2003, was installed in the rover’s underbelly to acquire and store core samples (O’Neil and Cazaux 2000). The Mini-Corer was planned to collect 50-60 rock and soil cores from 20 different locations, with a total sample mass of 250 g. Furthermore, the Mini-Corer can obtain two cores from a single borehole by shearing the core through the rotation of the inner tube during sampling (Gorevan et al. 2003).
The Micro Drill has been specifically designed to fit the limited payload volume and mass of a small spacecraft to explore extreme terrains such as volcanic vents and slopes on Mars. The Micro Drill is installed on the Extreme Access Vehicle, a spacecraft developed by NASA Kennedy Space Center (KSC). The Extreme Access Vehicle is a small Martian mining robot capable of flying into and out of meteorite craters. The Micro Drill is a rotary percussive drilling machine with the capability of both core acquisition and core shearing (Zacny et al. 2014b). It can capture a core from rocks with a strength of up to 40 MPa in just a few minutes. During sampling, the eccentric inner tube rotates to shear the core for collection. The Micro Drill has an integrated design where the drill bit and sample tube are not separated, facilitating the storage of cores using the OBOC (One Bit One Core) system (Zacny et al. 2014a). This apparatus exhibits minimal circular scarring on the obtained samples and offers low weight and power consumption of the drill bit, leading to high sampling efficiency.
The ROtary PErcussive Coring (ROPEC), designed by HB in 2014, was developed to meet the requirements of the Mars 2020 mission for collecting core samples, powders, and weathered rock samples on the Martian surface (Chu et al. 2014). The ROPEC employs an eccentric double-tube core truncation method and utilizes the OBOC system for sample caching. During the sampling operation, the robotic arm deploys the ROPEC onto the target rock, using a pair of preloaded tips to hold the drill bit in the proper position. The ROPEC employs a hybrid drilling technique that combines rotation and percussion to penetrate various rock formations, including basalt and sedimentary rock. When the drill bit reaches the desired depth, internal mechanisms shear the core at the bottom of the drill bit, separating it from the bedrock and stabilizing it within the drill bit. The drill bit with the core is then delivered to the sample caching device for temporary storage. In addition to collecting core samples, the ROPEC can be used in conjunction with other end effectors to perform tasks such as surface abrading and powder clearing on rock surfaces (Zacny et al. 2014a).
The integrated coring and abrading tool (CAT), designed by HB, combines the functionalities of rock grinding and a miniature coring device. CAT is mounted at the end of a robotic arm and is capable of autonomously acquiring, retaining, and transferring loose material core samples. It also can autonomously replace drill bits and end effectors (Zacny et al. 2008b; Bar-Cohen and Zacny 2009).
3.2.2 Pneumatic Surface Drills
The pneumatic surface drills generate only relatively weak reactive forces, making them suitable for collecting surface samples on low-gravity celestial bodies. The TAGSAM equipped with OSIRIS-Rex is an excellent apparatus for successful aerodynamic sampling. Another aerodynamic sampling method involves integrating the sampling device into the landing pads of the lander. This allows for a shorter deployment process of the sampling device during sampling operations, thus enhancing the efficiency of the sampling task. Employing gas for sample collection and transportation minimizes sample contamination. However, the samples obtained using this method tend to have a uniform morphology, often appearing as powdery substances, and the volume of samples collected is challenging to guarantee. Figure 8 shows some representative surface aerodynamic sampling devices.

Pneumatic surface drills. (a) PlanetVac Xodiac: 1-PlanetVac Xodiac prototype; 2-Sample container; 3- Sampling principle. (b) FROST: 1-FROST prototype; 2-FROST sampling principle; 3-Sample transport and collection mechanism. (c) MMX mission: 1-MMX lander; 2-Coring sampler; 3-Pneumatic sampler. (d) Dragonfly mission: 1-Dragonfly lander; 2-DrACO sampling system. (Courtesy authors, Honeybee Robotics, JAXA, NASA)
PlanetVac Xodiac is a lander footpad-integrated planetary sampling system developed by HB for sampling bodies with low gravity (Spring et al. 2019). PlanetVac Xodiac is a novel sample collection concept that uses pressurized gas to collect samples from the surface of a planetary body. Nozzles in the lower part of the sampling cone eject gas onto the body surface, stirring up the weathering layer and creating a region of high pressure. This high-pressure region causes fluid to flow into the lower-pressure sample container. The sampler is capable of withstanding the high temperatures emitted by the propulsion system plume as well as the vibration and impact stresses during takeoff and landing. PlanetVac Xodiac not only successfully endured all three end-to-end field tests but also collected sample quantities exceeding 300 g in each trial.
Based on the PlanetVac Xodiac system, HB has made improvements and developed the Frozen Regolith Observation and Sampling Tool (FROST) (Zacny et al. 2020a). FROST integrates pneumatic sampling and rotary drilling sampling methods. It consists of a rotary percussive drill used to create a 20 cm-deep borehole on the surface and retrieve samples, along with the PlanetVac system for sample acquisition and pneumatic sample transfer. The drill and PlanetVac are mounted on the lander’s footpad/leg, eliminating the deployment process and reducing system weight and risk. PlanetVac alone serves as a mining and capturing system, where fine particles are transferred into a cup using a single gas jet. However, if the ground hardness is high and deep samples are required, PlanetVac alone is insufficient for excavation. Therefore, FROST combines the drill with the PlanetVac system to provide additional sampling capability and collect samples from deeper layers. After sample collection, the samples are pneumatically transported and stored in cups on a rotating platform.
The Drill for Acquisition of Complex Organics (DrACO) is a component of the sample collection and delivery system installed on the Dragonfly spacecraft for the exploration of Titan under the New Frontiers Program. The mission aims to evaluate the habitability of Titan and search for evidence of life (Lorenz et al. 2018). Dragonfly is planned to launch in 2026 and arrive on the surface of Titan in 2034. It is an octocopter lander that will perform multiple vertical take offs and landings at pre-surveyed locations. At each site, the DrACO sampling system is utilized by Dragonfly to analyze surface materials on Titan. The purpose of the DrACO system is to capture the surface and near-surface materials of Titan and deliver them to the Dragonfly Mass Spectrometer (DraMS). DrACO consists of four main subsystems: the Sample Excavation Drill, Pneumatic Transport System, Sample Delivery Carousel, and related aerospace electronics. Material is directly drawn from the debris pile generated by the drill and transported pneumatically through the fast-moving atmosphere of Titan to minimize temperature rise and reduce the risks of sample alteration or transportation system contamination (Zacny et al. 2020b, 2022b). The 94 K air temperature, 4.4 times higher air density, and 1/7th gravity on Titan significantly decrease the power requirements for pneumatic transport compared to Earth. Therefore, sample collection and transportation on Titan consume less energy.
The Martian Moons eXploration (MMX) mission, scheduled for launch in 2024 by JAXA, aims to conduct remote sensing and in-situ observations of Phobos and Deimos and return samples from Phobos (Sawada et al. 2021). To increase scientific yield and improve the sampling success rate, MMX employs a dual-sampling approach. The Coring sampler (C-SMP), deployed by the robotic arm, is capable of drilling and retrieving soil samples from deeper layers. The Pneumatic sampler (P-SMP) utilizes compressed gas to capture samples from the surface and subsurface (Kawakatsu et al. 2023). The P-SMP is mounted on a fixed pillar on the landing gear and can sample within 10 cm from the surface. The sampling funnel of the P-SMP is integrated into the lander footpad, where debris is directed into the funnel via gas jets on the surface of Phobos and transferred to the sample collection device through a transfer conduit (Dyne et al. 2021). This sampling architecture is simple and robust. Due to the use of ultra-pure gas, the risk of sample contamination is minimal. The C-SMP is equipped with an ejection mechanism to acquire surface regolith exceeding 2 cm in depth, with a mass of 10 g or more, and transfer it to a storage container using a multi-degree-of-freedom robotic arm (Kawakatsu et al. 2023).
3.2.3 Single-Rod Drills
The significant advantages of single-rod drills lie in their stable performance, compact structure, and lightweight design, facilitating easy transportation and deployment in extraterrestrial missions without requiring excessive resources or space. The single-rod drills encompass multiple operational modes, including rotation, impact, and rotational impact, with stable output achieved through algorithms. Moreover, the single-rod drills exhibit proficient sample preservation capabilities and a robust ability to break rocks. However, the limited length of the single drill rod restricts the achievable drilling depth of the tool. Figure 9 shows some representative single-rod drills.

Single-rod drills. (a) TRIDENT: 1-Viper rover; 2-NOVA-C lander; 3-TRIDENT. (B) Luna 27 and ProSPA: 1-Luna 27 lander; 2-ProSPA. (c) Lunar drill-based sampling device: 1-HIT sampler drill;2-Beihang drill. (d) 1-DAME; 2-CRUX; 3-Icebreaker; 4-Icebreaker II; 5-LITA; 6-LPD; 7-UMDS. (e) P-RAID. (f) VISE. (Courtesy authors, NASA, Roscosmos, Honeybee Robotics, Harbin Institute of Technology, Beihang University, Space Research Centre PAS)
In preparation for the Artemis astronaut missions to the Moon, NASA is planning to deploy robots to explore the lunar South Pole. The NOVA-C landing platform and the VIPER are scheduled to make a landing at the lunar South Pole to conduct the Polar Resources Ice Mining Experiment-1 (PRIME-1) mission. This mission aims to determine and assess the abundance and quality of water in regions with anticipated ice presence. PRIME-1 stands as the pioneering example of In-Situ Resource Utilization (ISRU) on the lunar surface. Both the NOVA-C landing platform and VIPER are equipped with the TRIDENT, developed by HB (Zacny et al. 2023). The TRIDENT comprises four integral components: the drill head, auger/bit assembly, deployment stage, and feed stage. Significantly, TRIDENT employs an upward movement of the drill head with each incremental drilling distance, thereby reducing friction between the drill pipe and the borehole. This operational approach reduces the power consumption resulting from friction while simultaneously increasing the working time (Paulsen et al. 2017).
The primary goal of Luna 27 is to conduct detailed investigations of the lunar soil and search for potential resources, particularly water ice, which could be crucial for future lunar exploration and habitation efforts (Sefton-Nash et al. 2020). The Package for Resource Observation and in-Situ Prospecting for Exploration, Commercial Exploitation and Transportation (PROSPECT) is the payload for use at the lunar surface. PROSPECT consists of two primary components: the PROSPECT Sample Excavation and Extraction Drill, which is responsible for drilling and collecting samples, and the PROSPECT Processing and Analysis, an instrument used for analyzing the collected samples. The sampling tool features a \(\Phi \)29 mm string diameter, which includes an auger, and a \(\Phi \)12 mm sliding central pilot and sample chamber (Savoia et al. 2016). It incorporates embedded temperature sensors for monitoring. The cutting bit is made of carbide/PCD diamond material, ensuring efficient sample collection. The tool also includes an embedded mechanism, powered by an EC13 brushless motor, which is responsible for creating the sample chamber, supporting sample retention after coring through a spiking system, and pushing out the collected sample.
Chinese universities have also developed relevant drill-based sampling equipment for lunar sample collection. The lunar soil drilling coring device developed by the Harbin Institute of Technology (HIT) has many working modes of rotation, impact and impact rotation. The drill’s rotational and impact movements are each powered by two separate motors. The coring mechanism is composed of an inner and outer double-layer coring tube, a coring soft bag and a sealing device. After sampling, lunar soil will be preserved in a coring soft bag and recovered by shaping and winding (Wu 2014). The lunar soil drilling and coring device developed by Beihang University employs an outer helical hollow drill pipe for the sampling process. The drilling system achieves a depth of approximately 2 m. The lunar soil is stored within the inner tube, effectively preserving the original information of the samples (Zhao et al. 2019).
The Drilling Automation for Mars Exploration (DAME) project is funded by NASA’s Mars Instrument Development Program (Glass et al. 2006). Its key features include drilling automation and fault recovery, enabling deeper drilling (Glass et al. 2008). However, DAME has a large size and volume, requiring significant power and drilling pressure. Efforts should be made to reduce the overall power consumption, improve structural compactness, and decrease its weight to facilitate transportation by Mars rovers. In 2009, The Construction and Resource Utilization Explorer (CRUX) drill sampling unit, designed by HB, was designed with a rotary impact device to overcome the lack of WOB when sampling the surface of Mars. The CRUX has two independent rotary impact drills that allow for rotary, impact and rotary impact operating modes, producing 45 Nm of torque at 200 rpm (Bar-Cohen and Zacny 2009; Paulsen et al. 2010).
The Icebreaker Drill, developed by HB in 2013, aims to drill 1 m deep into the Martian surface to explore the process of ice formation on the Martian surface, to understand the mechanical properties of Martian permafrost, and to search for evidence of life on Mars (Zacny et al. 2013c). The Icebreaker consists of a robotic arm, a Z-Stage, a rotary percussion drill, an auger rod with a drill bit and a sampling device. The robotic arm is used to adjust the position of the drilling tool during sampling and to enable sample transfer. Pressure sensors are cabled on both sides of the stand to provide drill pressure feedback to the rig controller. The impact mechanism is based on the cam-spring principle and is motor-driven for ruggedness and reliability. Soil adheres to the grooves of the auger rods as the Icebreaker drills, and for each depth of drilling the auger tool needs to be reversed to lift the auger rods out of the borehole, removing and collecting soil from the rods using brushes. This sampling method reduces the friction between the rock chips and the drill hole and reduces the power consumption for soil transport, but it increases the sampling time and reduces the sampling efficiency. A drill reamer is designed on top of the auger to help retract the auger from the borehole in the event of borehole collapse or rock cover. The auger has a built-in temperature sensor that, if the ambient temperature is too high, reduces the auger speed until the borehole cools to prevent ice from melting. There is a soil resistance measurement sensor in the auger to determine the physical state of the soil. With a power of 100 W and a drilling pressure of 100 N, it is possible to drill up to 1 m/h. (McKay et al. 2013). Based on the Icebreaker, HB has developed the Lunar Prospecting Drill and the Icebreaker II, which offer substantially reduced mass with largely similar performance to the 1st generation (Zacny et al. 2014c).
The Life In The Atacama (LITA) drill, developed by HB in 2013, is lighter than the Icebreaker, weighing approximately 9 kg, with a power of 100 W. Experimental tests have shown an average drilling depth of 80 cm. However, the torque generated by the drill is insufficient to penetrate hard rock or frozen soil materials effectively (Glass et al. 2014a). The Icebreaker-3, an improvement over LITA, has a higher mass of 12 kg and a reinforced drill shaft, significantly enhancing its rock-breaking capabilities. Incorporating a sturdy drill rod, high-performance motor, and reverse rotation capability has notably improved drilling operations. The interoperability demonstrated through sample transfer highlights the technical readiness of Icebreaker-3 as a flight sample collection instrument (Glass et al. 2015).
The design of the Lunar Prospecting Drill is based on the Icebreaker Drill, intended for the exploration and extraction of water from lunar soil. The LPD weighs approximately 12 kg and incorporates four auger actuators, percussive actuators, a Drill Z-stage, and a Deployment Z-stage (Zacny et al. 2015b). The drill bit captures samples from deep grooves through a “bite” method, reaching a depth of about 10 cm, and transfers them to instruments for analysis. Consequently, the design of the drill aims to achieve a depth goal of 1 m within 10 steps. The advantage of this approach lies in its ability to retain geological layers at intervals of 10 cm. Since the drill bit does not need to extract samples to the surface, the risk of becoming jammed is reduced. Additionally, the lower risk of freezing is attributed to the cooling time available for the drill bit and the subsurface during sample analysis. This approach offers benefits in terms of both safety and efficiency.
The Ultra-Light Mobile Drilling System (UMDS), developed by CBK PAN, is divided into three main subsystems: the Mobile Robot (MR), Support Module (SM), and Drilling Subsystem (DR) (Paśko et al. 2016). It is capable of drilling to depths of up to 2 m. The drilling head (DR) has a length of 400 mm and a diameter of 34 mm. One of the key features of the UMDS design lies in the exceptional maneuverability of the MR, enabling the drilling apparatus to perform sampling in extremely challenging terrains. Unlike conventional drill strings that consist of interconnected pipes, the UMDS system employs tubular boom technology as its drill string. This approach offers significant advantages in terms of mass and volume efficiency (Ciszewski et al. 2015).
Rapid Access Isotope Drill (RAID), proficient in penetrating ice consolidation and rocky terrain at and below the ice/rock interface. The P-RAID design has two core features: a cam-driven hammer impact actuator and a multi-motor gearbox assembly. The multi-motor gearbox assembly consists of three Maxon brushless DC motor-driven gearboxes. The average total power of the P-RAID is approximately 75 W. The P-RAID has a drill bit with an outside diameter of 40 mm and an inside diameter of 25 mm. The P-RAID is designed in a modular fashion so that multiple individual components can be combined to form a single, functional assembly, yet each part can be easily disassembled and maintained (Timoney et al. 2020).
To sample the extreme environment of Venus, HB developed the Venus In Situ Explorer (VISE) drill in collaboration with JPL, targeting drilling depths of around 5 cm (Zacny et al. 2017). Due to the harsh temperature and atmospheric conditions on Venus, the design goal of the VISE drill was to minimize the time spent sampling and reduce environmental interference with the drill. The VISE drill uses cam-spring based hammer technology, which provides the fastest sampling speed. The VISE drill uses a pneumatic suction system, which reduces cutter size, drilling time, drilling power and energy consumption. The drill was tested to drill at 120 MPa Saddleback Basalt at room temperature. The rig successfully penetrated to a depth of 4.5 cm in 9.5 minutes and collected a 25 g sample. Additionally, tests were conducted in the Venus module of JPL, where the rig successfully penetrated to a target depth of about 5 cm and pneumatically transferred samples (Zacny et al. 2022a). The experiments demonstrate that drilling and sample transfer under Venusian conditions is possible, paving the way for future missions to Venus.
3.2.4 Multi-Rod Drills
To address the constraint of limited drilling depth commonly associated with single-rod drills, researchers have designed several prototypes of multi-rod connection drills. In contrast to alternative sampling techniques, multi-rod drills provide a notable advantage by enabling the collection of a substantial sample volume while preserving the original stratigraphic information of the specimens. Figure 10 shows some representative multi-rod connection drills.

Multi-Rod drills. (a) Micro RoSA2: 1-Micro RoSA2 rover; 2-DSS; 3-Drilling rods within DSS. (b) MARTE. (c) DeeDri: 1-DeeDri drilling mechanism. 2-Core collection mechanism. (d) Multi-tube pneumatic sampling device. (e) ExoMars: 1-Rosalind Franklin rover; 2-Multi-rod sampling drill; 3-Sample transfer system to ALD; 4-Two configurations of drilling rods. (Courtesy authors, ESA, NASA, and Harbin Institute of Technology)
Micro Robots for Scientific Applications 2 (Micro RoSA2), designed in 2001 with funding from ESA, is a tracked rover-based drilling system targeting deep sampling on the Martian surface (Suomela et al. 2002). The system consists of the lander and the Mrosa2 rover, which carries the Drill-based sampling Subsystem (DSS). The DSS utilizes a multi-drill column lap design that is compact and meets both volume and size requirements while achieving drilling depth targets. The drill pipe consists of 10 individual tubes connected sequentially to drill to a depth of 2 m (Anttila et al. 2002). Sampling in sand and soft limestone is possible with a drilling pressure of 30 N. The DSS delivers the collected samples between landers and also allows temporary storage of the samples. The device validates the feasibility of small rover mining for drill sampling. The lander provides an adequate source of functionality for both rover and drilling missions but limits the rover’s range of exploration (Anttila 2005).
The DeeDri project is funded by the Italian Space Agency (ASI) for the NASA Mars exploration mission to search for life and resources. Italian companies Tecnospazio and Galileo Avionica have developed a prototype of the coring mechanism. The coring mechanism consists of a hollow threaded pipe and a drill bit (Re et al. 2002). The central piston of the drill tip can be pulled out inside the tool to form a cavity to collect core or powder samples. Drill-based sampling are achieved with less power and torque by reducing the diameter of the drilling tool (Magnani et al. 2006). Based on this coring device, the Deedri sampler has two sampling schemes: shallow single-rod sampling and multi-rod deep sampling. The design of DeeDri multi-rod drilling rig draws lessons from the experience of MroSA2 DSS, which can achieve increased depth drilling while reducing the size of drilling devices. Due to the additional mechanism in the multi-rod machine tool to realize the function of conveying, extending and recovering the drill pipe, the drilling tool is more complex (Magnani et al. 2004). The shallow sampling design has high reliability and low quality. The drilling depth is up to 1 m with a single drilling tool, and the sampling process can be repeated and sampled many times at different depths.
The Mars Astrobiology Research and Technology Experiment (MARTE) was developed by HB in 2008. Its objective is to achieve drill-based sampling on Mars, searching for underground biospheres and optimizing the drill-based sampling methods (Stoker et al. 2008; Paulsen et al. 2006). MARTE consists of a drilling apparatus, rock core and sample handling system, remote sensing instruments, and life detection instruments. MARTE utilizes a helical drilling method and a multi-tube docking technique. The internal structure of the drilling system consists of one 1.5 m-long guide rod and ten 1 m-long drilling rods, which are connected one after another to achieve drill-based sampling at a depth of 10 m. The sampling system can store ten samples, each measuring 250 mm in length, which are sliced using an end mill for detection. The samples are crushed into a powder using a rock crusher and then transferred to scientific instruments for analysis. While this drilling system utilizes a multi-tube docking approach and combines multiple devices, allowing for deeper drilling and various sample processing and testing, it does not provide pressure, temperature, or humidity control for the samples, which may result in certain deviations in the authenticity of the obtained samples (Prieto-Ballesteros et al. 2008; Stoker et al. 2005).
The Harbin Institute of Technology has developed a device for deep Martian soil sampling using a multi-tube drilling and pneumatic sampling programmer. The device includes a feeding mechanism, a rotating mechanism, a clamping mechanism and an indexing mechanism. A double-layer hollow drilling rod is used to achieve deep Martian drilling, and a high-pressure airflow is injected into the drilling rod to make Martian soil particles rise along the wall of the drilling rod and enter the sample recovery device (Hou et al. 2019).
The ExoMars Mission, scheduled for landing on Mars in 2028, will carry the Rosalind Franklin Rover. The mission aims to obtain pristine underground samples to study the mineralogy of Martian soil and rocks (Vago et al. 2006). The sampling system of the Rosalind Franklin Rover consists of three main components: the drilling box, the positioning unit, and the electronics unit (Magnani et al. 2011). The drilling box is mounted at the front of the ExoMars rover, while the electronics unit is housed within the Analytical Laboratory Drawer (ALD) inside the rover’s body. The task of the sampling system is to drill to a depth of approximately 2 m on the Martian surface and acquire samples of Martian soil or rock with a volume of 3 × \(\Phi\)1 cm. The drilling box contains one drilling rod and three extension rods, which can be combined to achieve a maximum drill-based sampling depth of 2 m (Van Winnendael et al. 2005). During sampling, once the first drilling rod fully penetrates the soil, it is detached from the power shaft, and an extension rod is connected between the drilling rod and the power shaft. After sample collection, the positioning unit adjusts the position of the drilling device, allowing for the transfer of samples to the ALD of the rover for sample distribution, processing, and analysis.
3.2.5 Cable-Based Drills
Large-depth coring is usually achieved by either multi-rod drills in conjunction with drilling or by cable infiltration. Even the multi-rod sampling devices have a large volume and mass, require more axial force, and have high power consumption. Moreover, it requires a complex drill rod feeding mechanism for drill turn installation, which results in low reliability. In contrast, cable-based drills exert lightweight characteristics, exert minimal frictional resistance against soil, and consume lower power compared to the overlapped multi-rod sampling method. The mole used in the InSight mission, as well as the PLUTO installed on the Mars-Beagle 2 lander in the Mars Express mission, are both cable-based drills. Figure 11 shows some representative cable-based drills.

Cable-based drills. (a) Auto-Gopher: 1-USDC; 2-Auto-Gopher I; 3-Auto-Gopher II. (b) WATSON. (c) AMNH. (d) EMOLE. (e) KRET. (Courtesy authors, Honeybee Robotics, NASA, Centrum Badan Kosmicznych PAN, and Polish Space Research Centre PAS)
The Ultrasonic/sonic driller/corer (USDC), jointly developed by JPL and Cybersonics, weighs 700 g and can drill 12 mm holes in hard rock (Bar-Cohen et al. 2001). The USDC uses a piezoelectric actuator to vibrate a horn, which impacts a free mass block, thereby creating stress pulses on the drill bit for rock-breaking sampling. The Auto-Gopher, based on the USDC design, is developed for exploring potential signs of life, as well as searching for water and other resources on Mars. It is a cable-based rotary percussion drilling device that combines ultrasonic actuator hammering for rock fracturing and a rotating grooved drill bit for debris removal, enabling continuous core retrieval and removal cycles (Badescu et al. 2011). The Auto-Gopher consists of a drill bit, percussion components, rotating components, an anchoring device, and linear feed components, enabling continuous core retrieval and removal cycles. The drill bit has three cavities for sample storage, debris containment, and a free mass block. The rotating components provide a power of 360 W, generating a torque of 15.5 Nm at a drilling speed of 100 rpm. The anchoring device at the top of the drill bit controls the feed rate. After drilling to a certain depth, the drill bit needs to be extracted from the borehole, collect the core samples, and clear the debris (Badescu et al. 2013; Bar-Cohen et al. 2012). The Auto-Gopher II, an improved version based on its predecessor, features enhancements in the piezoelectric actuator, optimized drill bit, and enhanced rock fracturing capability, resulting in an increased penetration depth from the original 3 m to 7.52 m (Badescu et al. 2017, 2018, 2019). It is connected to the lander via a tether, through which power and data are transmitted. Compared to conventional drilling devices, the ultrasonic structure of the Auto-Gopher II offers compact size, low mass, low power consumption, and high efficiency, enabling drilling operations with relatively lower axial force requirements (Bar-Cohen et al. 2017).
The Wireline Analysis Tool for Subsurface Observation of Northern-ice-sheets (WATSON) drill is an improvement from the Auto-Gopher II drill (Eshelman et al. 2017; Mellerowicz et al. 2018). WATSON uses a piezoelectric impact system instead of the traditional cam spring system. It revolutionizes deep subsurface exploration of extraterrestrial bodies by bringing the instrument to the samples rather than transferring the samples to the instrument. It achieves non-destructive, in-situ measurements by scanning the ice walls with lasers. In 2019, WATSON successfully performed automated drilling at a site in Greenland at an elevation of 3200 m, reaching a depth of 111 m. It generated spatial distribution images of organic matter and microbial communities along the borehole walls and collected 50 cm long samples (Malaska et al. 2020). Further optimization of WATSON is necessary to reduce its mass, size, and power consumption to meet the requirements of spaceflight. It can be loaded onto a rover for sampling and exploration missions in planetary polar regions, such as the polar regions of Mars, Enceladus, or Europa, for future astrobiological investigations.
In 2016, the AMNH Planetary Deep Drill was developed to sample the icy layers on Mars or Europa. This wireline drill requires periodic removal from the borehole to clear debris. It achieved drilling in Plaster City Gypsum with a hardness of 38 MPa at a rate of 30-120 cm/h and completed sampling at a depth of 13.5 m (Zacny et al. 2016).
EMOLE is a mole-type penetrator with an electromagnetic linear drive. The innovation of its design lies in the arrangement of several electromagnets as a direct hammer drive, which brings a double improvement. Firstly, as the electromagnets, in this case, do not require any transmission and do not have the rotating parts found in a DC motor, the whole apparatus is simple and reliable. Secondly, during operation, the drive control can regulate the hammering energy, which can help to save energy and protect the scientific instrument from damage. EMOLE has dimensions of 255 mm × \(\Phi\)25.4 mm and an overall weight of 704 g. Tests carried out proved that the penetrator was able to withstand simulated space conditions, such as vacuum and high and low-temperature operation. After about 5 hours of operation and nearly 8,000 excitation strokes, EMOLE remained fully functional (Grygorczuk et al. 2016).
The Polish Space Research Centre PAS designed the mole penetrator KRET (Bieńkowski et al. 2020). The mole penetrator KRET belongs to the category of Low-Velocity Penetrators (LVP) driven by hammering action. It is low-speed, medium-high stroke energy but a low-power self-excavating penetrator. KRET has a variety of sensors mounted on top of it to measure scientific information below the surface of the planetary body. KRET achieves a probe depth of approximately 7 m and serves for the detection of heat flow on the lunar surface. The advantage of KRET lies in its lightweight design, enabling operation in a vacuum environment (Seweryn et al. 2013).
The cable-based drills are connected to the probe via a cable, and they feature a simple structure and a novel approach, with the expectation of achieving greater sampling depths. However, the effectiveness of this cable-based drill is heavily influenced by the mechanical and physical properties of the soil, making it challenging to guarantee the desired sampling depth. To overcome the insufficient understanding of planetary soil characteristics, it is currently advisable to consider combining tactile feedback with machine learning detection methods to predict unfavorable factors such as hard rocks that may be encountered during sampling.
3.2.6 Terrestrial Ice Penetration Drills
Researchers have developed terrestrial ice penetration drills to penetrate the icy crust of extraterrestrial bodies and explore subterranean oceans. It features a large volume, high mass, and extended operational duration. In addition to using mechanical rotary percussion drill bits, the terrestrial ice penetration drills employ laser ablation on the icy crust or utilize thermal energy to melt through it, enabling its descent. In the future, as the search for life on bodies like Enceladus and Europa continues, the terrestrial ice penetration drills are poised to play an increasingly pivotal role. Figure 12 shows some representative terrestrial ice penetration drills.

Terrestrial ice penetration drills. (a) ARCHIMEDES ice cavern robot: 1-Concept of terrestrial ice penetration drills; 2-DLP tested in an ice block. (b) THOR. (c) PROMETHEUS project: 1-PROMETHEUS cryobot; 2-CCHWD. (d) DeepLeng. (e) Teredo IceShuttle. (f) SLUSH
In the ARCHIMEDES project, Stone Aerospace has developed the latest ice-penetrating robot using Direct Laser Penetration (DLP) technology, where a 5 kW, 1070 nm laser is used to inject energy into the ice (Siegel et al. 2022). DLP technology employs a 5 kW, 1070 nm laser to inject energy into the ice. The operating principle of DLP relies on the optical transmission properties of water and ice. In the near-infrared wavelength, ice absorbs light energy preferentially compared to the small amount absorbed by the liquid water film. As the ice melts, the probe descends due to gravity, facilitating penetration. The efficiency of this penetration method is higher since energy is directly transmitted into the ice with minimal thermal losses in the sidewalls. The DLP laser source is derived from a commercial off-the-shelf light source, and optical fibers transmit the laser beam from the surface to the probe, extending the detection range by increasing the fiber length. Experiments have demonstrated high efficiency in transmitting laser beams through optical fibers, with no degradation in toughness observed in low-temperature environments. However, it is important to note that the laser source requires external power, and the efficiency of converting electrical energy input into optical energy output in the laser beam is currently around 50%. Furthermore, the penetration efficiency of DLP has only been assessed in pure water ice, with potential challenges posed by impurities in real-world scenarios.
The Thermal High-voltage Ocean-penetrator Research platform (THOR) is a prototype ocean exploration tool that combines three technologies: closed-cycle hot-water drilling (CCHWD), small-diameter high-voltage and high-power tether technology high voltage fluid-resistor water heating. THOR employs these technologies to craft an efficient cryobot and integrates the Kilopower fission reactor for thermal power. By employing hot water jets in the front and rear, THOR can melt through ice in both downward and upward directions (Guerrero et al. 2022).
The PROMETHEUS project, funded by NASA’s SESAME program and designed by Stone Aerospace, aims to develop a cryobot for exploring Europa’s global ocean by penetrating its ice crust (Richmond et al. 2022). This innovative vehicle concept allows for an in-situ investigation of this unique environment to search for extraterrestrial life. The PROMETHEUS vehicle is powered by the NASA Kilopower reactor, providing both melting heat and electrical power, and utilizes CCHWD for propulsion and steering. In situations where external melt water is unavailable, a “passive mode” circulates reserve fluid inside the nose to transfer heat at a slower rate, utilizing the controllable reactor. Furthermore, a vertical motion control system deploys a fine tether that solidifies in the vehicle’s wake, which enhances safety support and enables essential maneuverability.
Penetrating ice layers and accessing underlying oceans is a current focus of exploration for Europa and Enceladus. Another exploration hotspot involves the design of Autonomous Underwater Vehicle (AUV) for seeking life or collecting samples beneath underwater environments. The DFKI - Robotics Innovation Center has developed DeepLeng, a Compact AUV System for Long-Term Deployments. With a diameter of just 28 cm, DeepLeng is suitable for ice penetration. Its hydrodynamically optimized shell reduces energy consumption, enabling extended operational ranges (Hildebrandt et al. 2020). Tested in frozen lakes, DeepLeng can submerge in underwater ice environments for up to 150 hours, operate for 50 hours, and demonstrate stable reliability in low-temperature conditions (Hildebrandt et al. 2022).
DFKI has developed the Teredo IceShuttle, a compact AUV system designed for specific missions. With dimensions of approximately 6.75 m × \(\Phi\)0.28 m and a weight of around 160 kg, the IceShuttle features a thermal drill equipped with 6 × 600 W cartridge heaters, boasting an estimated drilling rate of 0.8 m/h (Wirtz and Hildebrandt 2016). The primary objective of the Teredo IceShuttle is to penetrate through the ice shell and transport a scientific payload AUV, facilitating its safe deployment into water bodies for exploration. The carrier also serves as a base station, providing additional navigation services to the AUV as well as a docking interface for external communication and energy supply to the AUV.
HB developed Search for Life Using Submersible Heated drills (SLUSH), a thermo-mechanical probe designed for drilling through Europa’s 15 km deep ice crust (Zacny et al. 2018). SLUSH incorporates the Kilopower reactor for thermal and electrical requirements. It is easy to control the fission reactor, and there is no need for additional thermal management systems. The probe is connected to a surface lander through a communications tether, with the tether left behind in the ice as the spool is depleted. The probe combines the advantages of two drilling techniques: a rotary-percussive drill to break the ice formation and melting to remove the cuttings. Unlike conventional melt probes, SLUSH only partially melts the ice cuttings, creating a “slush” that behaves like a liquid while still partially frozen, resulting in reduced power consumption (Zacny et al. 2019, 2018). The mechanical approach allows for faster drilling rates and enables the probe to penetrate non-icy formations.
3.2.7 Biomimetic Drills
The application of bionics principles to enhance the mobility of drill-based sampling devices, providing them with the agility found in natural creatures, is gaining significant traction in planetary robotics research. These bioinspired systems, in contrast to conventional drilling equipment or robotic boring devices, feature compact dimensions, lightweight designs, low power requirements, and robust maneuverability and flexibility. Their adaptability extends to a range of planetary exploration missions, including regolith sampling, instrument deployment, and infrastructure construction, making them a topic of growing interest among scientists and engineers worldwide. Figure 13 shows some representative biomimetic drills.

Biomimetic drills. (a) CAD model of RPDS: 1-RPDS, 2-Rotary propulsion unit; 3-Propulsion actuators. (b) SSD and CSD. (c) Creepy-boring penetrator. (d) LEAVO and SEAVO. (e) DROD. (f) Mole-bot. (g) Dual-Rasp sampler: 1-Experimental testing of the Dual-Rasp sampler; 2-Dual-Rasp. (h) TGSS. (Courtesy authors, Northwestern University, JAXA, Honeybee Robotics, Korea Advanced Institute of Science and Technology, University of Surrey, Harbin Institute of Technology)
In 2006, Northeast University in Boston, USA, developed the Rotating Propulsion Drilling System (RPDS) (Liu et al. 2008). The RPDS uses a rotating screw propulsion system, which offers a simpler kinematic structure, higher efficiency, and potential for miniaturization and deep drilling. Three propulsion actuators, evenly distributed around the rotary propulsion unit, generate rotational and linear motion for the drilling bit, while three steering actuators provide automatic directional control. To handle cuttings, a strategy involving an integrated cuttings bucket is employed. The cuttings are collected through grooves on the drill bit and stored in the bucket located behind the bit. When drilling is complete, the entire drill is rapidly brought to the surface in a sliding mode to empty the bucket. It should be noted that the RPDS may require multiple trips to reach the desired depth, and a casing process, similar to oil drilling, may be necessary to prevent the hole from collapsing. In cases where the drilled hole has loose walls, the tool may be pulled out through a reel/tether system.
In 2009, the Graduate University for Advanced Studies and the Japan Aerospace Exploration Agency jointly developed two mole-type drilling devices, namely Single Screw Drill (SSD) and Contra-Rotor Screw Drill (CSD), with a drilling depth of approximately 1 m. The SSD features a 50 mm long conical screw bit, with a maximum diameter of 50 mm and a helix angle of 10°, rotating in a single direction. The CSD, an optimized version of the SSD, weighs 0.604 kg and is designed with a two-stage conical screw bit rotating in opposite directions, driven by two independent motors. This design reduces the reactive force during drilling and significantly improves drilling efficiency (Nagaoka et al. 2008, 2010).
In 2014, Harbin Institute of Technology, China, developed a peristaltic digging inserter with a mass of 4.1 kg and a size of 80 mm × 560 mm. The whole machine contains two digging units, the main digging unit with a rated power of 50 W and a rated rotational speed of 93.69 rpm, and the secondary digging unit with a rated power of 40 W and a rated rotational speed of 106.8 rpm (Zhang 2014). The creep-digging infiltrator breaks up the primary soil at the front end into looser secondary lunar soil to transfer the back end during the infiltration process, which reduces the loading of the infiltrator by the lunar soil accumulation (Zhang 2014; Jie et al. 2015).
JPL has developed the Dual-Rasp sampler for collecting samples from the surface of Enceladus up to 1 cm deep. It offers the advantage of sampling with less than 8 N of reaction forces on loose to hard materials (Backes et al. 2020). The Dual-Rasp sampler is mounted at the end of a robotic arm and deployed at the desired sampling location. During sampling, the two rasps of the sampler rotate in opposite directions, separating the soil powder from the ground and lifting it upward. The samples are guided into the sample transport and collection device through an elliptical track. The Dual-Rasp sampler employs two sample transfer methods: the carousel approach and pneumatic transfer. The carousel approach utilizes 10 sample cups, and when each cup is filled, the carousel rotates to replace it with a new one for soil collection. The number and volume of samples are limited by the number and capacity of the sample cups. The pneumatic particle transport model uses gas to transport samples to scientific instruments. The advantage of pneumatic transfer is that the sample volume is only limited by the gas supply required for sample transport, but it may potentially increase the mechanical complexity.
Touch and Go Surface Sampler (TGSS) was developed by HB for drilling and collecting rock chip samples on the surface of Enceladus (Zacny et al. 2013a). The TGSS comprises three subsystems: a deployment mechanism, a sampling head, and a sample containment subsystem. The deployment mechanism extends a boom to the surface to deploy the sampling head. The sampling head is equipped with 5 high-speed cutters (toothed wheels mounted on the sides of the center drill) driven by a single motor. These cutters rapidly dislodge surface material upon contact, and two guides positioned above the cutters direct the sample debris/chips into a removable sample chamber. The sample containment subsystem is responsible for transferring and sealing multiple samples. During testing, the TGSS successfully sampled regolith at a rate of 30 cc/sec and consolidated chalk with a strength of 10 MPa at a rate of 0.5 cc/sec (Zacny et al. 2015a).
Inspired by the European mole and the African mole-rat, the Korea Advanced Institute of Science and Technology has developed the Mole-bot (Lee et al. 2023). The front end of the Mole-bot features a spiral-propeller-like extendable drill head. As this drill rotates and grinds through the soil, its folding serrated blades extend outward, creating a tunnel wider than the robot’s cylindrical body. Instead of forelimbs, the robot uses two extendable hinged metal flanges positioned on either side of the drill to push the loose soil backwards from its front end. Additionally, the Mole-bot is equipped with three caterpillar-like tracks at the rear for propulsion, and a pivoting mechanical “waist” in its midsection enables it to change direction while tunneling.
Chuo University in Japan has developed two robots, LEAVO and SEAVO, inspired by the peristaltic motion principle of earthworms. LEAVO comprises three primary units: a propulsion unit, an excavation unit, and a discharging unit. The propulsion unit includes three additional propulsion subunits and moves through a borehole by emulating the peristaltic crawling motion of an earthworm. On the other hand, SEAVO is a sub-seafloor excavation robot consisting of an excavation unit and a propulsion unit. It mainly consists of an excavation unit for ground excavation and creating space for locomotion, while the propulsion unit is designed to move by extending and contracting cylinders to mimic the peristaltic motion of an earthworm (Isaka et al. 2020).
The University of Surrey in the United Kingdom has developed an improved version of the Dual Reciprocation Oscillation Drill (DROD), building upon the original DRD (dual-reciprocating drill) design (Alkalla et al. 2021). The DROD incorporates biological inspiration from both the wood wasp and fish caudal fin/sandfish, enabling it to generate simultaneous reciprocation and oscillation motions of the drill bit halves, respectively.
3.2.8 In-Situ Resource Utilization Drills
ISRU technology enables the survey and extraction of usable resources on celestial bodies such as the Moon. This technology can significantly reduce the payload launched from Earth to the target celestial body, thus effectively reducing launch costs. Currently, there is rapid development in the integration of resource detection and extraction capabilities within drilling sampling devices. Figure 14 shows some representative in-situ resource utilization drills.

In-situ resource utilization drills. (a) PVEx. (b) RedWater mars water sampling system. (c) SMART. (d) MISWE sampling device. (e) LISTER. (f) REBELS. (Courtesy authors, Honeybee Robotics)
The Planetary Volatiles Extractor (PVEx), designed by HB, is used to achieve In Situ Analysis of Unknowns (ISAU) by capturing volatile substances during the sampling process. PVEx combines the sampling and sample extraction processes, eliminating the need for sample transportation. The PVEx has a diameter of 5 cm and a length of 50 cm. It has rock-breaking capabilities ranging from 5 MPa to 45 MPa. The PVEx can drill at a speed of 2 cm/min and operates within a power range of 150-250 W. It is capable of effectively extracting ice-water substances (Zacny et al. 2021).
HB developed the Mobile In-Situ Water Extractor (MISWE), consisting of the IcySoil Acquisition and Delivery System (ISADS) and the Volatiles Extraction and Capture System (VECS), to extract water resources from frozen soils on extraterrestrial bodies (Zacny et al. 2012). The ISADS is a deep-fluted auger that drills into icy or ice-laden soils and preserves the soils in the flutes. The ISADS has a diameter of 10 cm and drills to a depth of up to 50 cm, with a sample volume of about 3,500 cm3 in a single operation. A 6-cm through-hole in the center of the ISADS A heater can be fitted. Once the drilling is complete, frozen soil adheres to the grooves of the ISADS, heating the frozen soil on the deep grooves and generating water vapor that flows through a one-way valve into the water collection tank and condenses. After extracting the water, the ISADS is lowered to the ground and rotates at high speed, dislodging the dry soil by centrifugal action. The MISWE then moves to the next position and repeats the sampling and sample extraction process.
The commercial landers on the CLPS missions will be relatively small with limited payload capacity, making it challenging to use traditional drill systems that exceed the lander’s mass and power limits. To address this issue, the Lunar Instrumentation for Subsurface Thermal Exploration with Rapidity (LISTER) was developed specifically for CLPS missions. Weighing approximately 4.6 kg and comparable in size to a shoebox (Ngo et al. 2019; Nagihara et al. 2021; Ngo et al. 2022). LISTER is a modular system attached to the legs or bottom of the lander. Its objective is to achieve a penetration depth of approximately 3 m. LISTER uses a pneumatic excavation system for efficient penetration into the lunar regolith. The deployment mechanism releases a Kapton and fiberglass boom. As the boom extends from the mechanism, it transforms from a flat shape to a hollow cylindrical column with a diameter of approximately 1 cm, providing mechanical strength. The leading edge of the boom features a penetrating cone that advances through a combination of spooling and gas jets. These jets are supplied through the boom and released from the tip of the cone, effectively dislodging regolith particles. A small needle-shaped sensor measuring 20 × \(\Phi\)2 mm is attached to the tip of the penetrating cone. The needle-shaped sensor is inserted into the undisturbed bottom of the unexcavated regolith and heated for 30 minutes. During this time, the temperature rise of the soil is monitored to determine the thermal conductivity based on the rate of temperature increase.
Sensing, Measurement, Analysis, and Reconnaissance Tool (SMART) is an advanced lunar drilling system designed for ISRU on the Moon. In contrast to TRIDENT, which relies on an auger to transport drill cuttings to the surface for analysis, SMART incorporates instruments directly into the auger and bit assembly, enabling on-site analysis (Stolov et al. 2023). The SMART has a 5 cm diameter drill and a 200 W motor. The percussion and auger mechanisms are coupled together and driven by the same actuator. This actuator can deliver a continuous torque of up to 3.1 Nm and simultaneously drive a percussion mechanism designed to deliver blows of 0.63 Joules/blow, at a rate of 4.6 blows/rotation. The instrument suite on SMART is specifically chosen to study the lunar surface, investigate the presence of water ice, and address various scientific inquiries related to the lunar polar regions. Moreover, SMART enables missions to make informed and efficient decisions regarding the transportation of downhole samples to rover-mounted ISRU instruments for additional analysis or processing.
The RedWater system, designed by HB, combines the Coiled Tube (CT) and RodWell (Rodriguez Well) technologies to drill through the ice, remove debris, melt subsurface water ice, and transport water to the surface (Mellerowicz et al. 2022; Palmowski et al. 2021). The CT is a pipe made of metal or composite material and is used to advance the Bottom Hole Assembly (BHA) through the surface soil and into the ice layer. The RodWell method involves melting the ice underground and delivering the liquid water to the surface. RedWater drills to a maximum depth of 25 m and consumes about 10-15 kW. During drilling, the BHA rotates and impacts to make a dive, and compressed gas is sent downhole through the CT tubing into the well, and the gas escapes at the bottom of the annular space between the BHA and the borehole wall, removing rock chips. Upon reaching the ice, the borehole continues for approximately 1 m, or until the packer is completely embedded in the ice, the CT stops advancing the BHA, and the packer is inflated to seal the borehole and isolate it from the pressure of the Martian environment. The heater in the auger was switched on to melt the surrounding ice. After the ice melts and enough water forms, gas from the surface pressurizes the borehole and transfers the water to the surface. The RedWater system combines drilling, debris removal, ice melting, and water transfer to enable the extraction and utilization of subsurface water resources on Mars.
Studying stratigraphy at a 10-meter scale in the mid-latitude and polar regions of the Moon would greatly improve our knowledge of subsurface gardening processes and the distribution of volatile substances. HB combined the technologies from Redwater, LISTER, and SMART to design Rapidly Excavated Borehole for Exploring Lunar Subsurface (REBELS) for in-situ scientific research below the lunar surface up to 10 m. REBELS deploys a metal pipe that is pulled out from a reel and reformed into a straight column, with the coiled-tubing serving as conduits for wires, fibers, and gases. At the end of the coiled-tubing, there is a Bottom Hole Assembly (BHA) housing various scientific instruments that collect underground data while drilling. The drill penetrates the ground using a mechanical drill bit and then transports the regolith to the surface using compressed gas (Palmowski et al. 2022). The advantage of REBELS is the direct integration of instruments into the sample, eliminating the need for sample transfer and enabling real-time data acquisition during drilling.
3.3 Summary of Drill-Based Sampling Devices
A comprehensive investigation has been conducted on drill-based sampling devices for extraterrestrial bodies, and their designs and sampling characteristics have been thoroughly analyzed and summarized, as shown in Table 7. Based on the varying depths of exploration or sampling performed by drill-based sampling devices for extraterrestrial bodies, these devices can be categorized into the following seven groups: small drill, pneumatic surface drill, single-rod drill, multi-rod drill, pneumatic deep probe, cable-based drill and terrestrial ice penetration drills.
4 Technological Challenges
The drill-based sampling of extraterrestrial bodies present numerous challenges and difficulties, rendering this task complex and formidable. Technical challenges primarily manifest in four aspects: the extreme surface conditions of celestial bodies, constraints imposed by aerospace travel, the intricate and uncharted geological conditions of extraterrestrial bodies, and communication delays, as shown in Fig. 15.

The challenges of extraterrestrial bodies sampling
(1) Aerospace Flight Constraints
The limitations of drilling devices in spaceflight are primarily reflected in four aspects: mass, size, energy, and materials. Due to the limited energy carried by the spacecraft or provided by solar panels, the allocation of energy to the sampling device is highly restricted, apart from the energy required to maintain the normal operation of the probe. The sampling device needs to have high operational efficiency. Therefore, it is necessary to fully estimate the energy consumption during the drilling process and develop low-power, high-energy-efficient sampling devices and sampling control strategies. Thus, a comprehensive assessment of energy consumption during drilling is imperative, and the development of low-power, energy-efficient sampling devices and control strategies is necessary. In order to achieve multifunctional, multitask, and multi-objective exploration, the probe needs to carry a considerable payload. To meet the requirements of rocket carrying capacity, efforts should be made to minimize the mass and volume of the sampling device to reduce exploration costs. While ensuring the sampling capability of the drilling tool, the drill rod structure should be compact and the layout should be as small as possible. Lightweight, high-strength materials should be used, and the strength margin of components should be minimized to reduce the mass of the drilling tool. At the same time, to achieve deep and extensive exploration goals, the size of the sampling device and the mechanical arm should be increased accordingly. Due to limitations in the internal space of the rocket, a modular design can be adopted for the drilling tool, and the mechanical arm should be capable of multiple folding to reduce the occupied space.
(2) Extreme surface conditions
The gravity of extraterrestrial bodies has a significant impact on the drilling speed and rock-breaking capability of drilling equipment (Zhang et al. 2022a). On celestial bodies with weak gravity, landers and rovers have relatively low weight, and the majority of sampling device Weight on Bit (WOB) primarily comes from the gravitational force of the lander or rover, except for drilling robots that use their mechanisms to generate downward force. As a result, drilling operations on extraterrestrial bodies may encounter significantly lower available WOB compared to terrestrial drilling. Insufficient WOB may result in excessively slow drilling speeds or insufficient ability to break through rock formations. When collecting deep-seated samples or harder rock samples, the role of WOB becomes even more critical (Zacny et al. 2008a). On the Moon, relying solely on the weight of the lander or rover to provide drilling pressure limits the sampling depth and makes it challenging to collect deep-seated samples. During asteroid sampling processes, landers conduct short-term landings and use projectiles to impact and collect samples, reducing the reaction force and mitigating the impact of microgravity on the sampling process. Alternatively, long-term landings can be employed with anchors to minimize the effects of reaction forces during sampling (Glassmeier et al. 2007). Furthermore, in a microgravity environment, sampled materials may be more prone to drifting or floating, necessitating specialized containers and fixation mechanisms to preserve the samples (Jin et al. 2022).
Extreme temperatures pose significant challenges to the design of sampling devices and the material selection process. For instance, Venus boasts surface temperatures soaring up to 462 °C. These extreme conditions create formidable obstacles for probes to operate on Venusian terrain, necessitating specialized designs and materials capable of enduring elevated temperatures (Basilevsky et al. 2007). The lunar surface experiences considerable temperature fluctuations between day and night, ranging from a scorching 127 °C during the day to a chilling −173 °C at night. With low thermal inertia, the moon undergoes rapid temperature shifts (Heiken et al. 1991). Subzero environments require materials resistant to brittle transitions, while high-temperature settings mandate minimal material deformation to prevent substantial distortion affecting the precision of component fitting, as well as the feasibility, reliability, and accuracy of movement. The pronounced day-night temperature differential mandates materials with stable coefficients of thermal expansion. Material structures should additionally possess certain heat storage and dissipation capabilities, enabling them to retain heat during periods of elevated temperature and safeguard their performance during extreme cold (Yao et al. 2021). Moreover, the strength of materials at sampling sites (such as water and ice) varies between high and low-temperature conditions. Generally, the material strength is notably higher at extremely low temperatures than at elevated ones, thereby imposing heightened requirements on the sampling device in terms of force, power, energy consumption, and structural robustness.
The atmospheric pressure of extraterrestrial celestial bodies exerts an unfavorable influence on the operation and design of sampling drills. When these drilling devices are in action, the friction between the drill string and the soil or rock generates substantial heat. However, the low thermal conductivity of the sparse atmosphere hinders the rapid dissipation of this heat, ultimately diminishing the durability of drilling equipment, the efficiency of sampling, and the fidelity of collected samples (Carr 2007). Furthermore, reduced atmospheric pressure can induce alterations in the phase transition temperatures of substances within samples. For instance, the sublimation of water ice and the vaporization of volatile compounds can be influenced by atmospheric pressure. This underscores the necessity for equipment to possess reliable sealing capabilities to prevent sample volatilization or degradation. Conversely, under high-pressure conditions, sampling drills must exhibit adequate strength and stability to withstand the mechanical stress in high-pressure environments, ensuring the structural integrity and stability of the equipment during sampling operations (Zacny et al. 2017).
Sampling extraterrestrial bodies poses numerous challenges in terms of radiation. Intense radiation can potentially damage the materials and electronic components of the equipment, necessitating the selection of radiation-resistant materials and components. Furthermore, radiation can cause electronic interference and noise within the equipment, impacting the precision and reliability of the sampling instrument. Certain types of radiation, such as high-energy particles, can contaminate and alter the sampled specimens. Radiation can induce chemical reactions or disrupt the structure of organic molecules within the samples, rendering them no longer representative of the true conditions of extraterrestrial bodies. Hence, researchers must implement measures during sampling design and processing to minimize contamination and degradation induced by radiation.
Figure 16 summarizes the surface environmental characteristics of human celestial body exploration. Furthermore, fine dust particles can erode incompletely sealed bearings, gears, and other mechanical devices, leading to mechanical component wear, reducing the working lifespan of drilling devices, and compromising operational reliability. Lunar dust carries static electricity, causing dust accumulation on instrument surfaces, which affects instrument performance. When dust accumulates on solar panels, it diminishes their ability to gather sunlight, resulting in an insufficient energy supply for lunar rovers (Colwell et al. 2007). The entry of dust into sampling devices or sample containers can result in sample contamination, thus impacting subsequent experiments and analyses.

Environmental characteristics of target sampling bodies and Earth
(3) Complex and unknown terrain and geology
The surface environments of celestial bodies impose various constraints on sampling operations. Moreover, as sampling drills penetrate deeper underground, the unknown geology and diverse topography of extraterrestrial bodies introduce potential risks to their sampling endeavors. The uncertainty in the geological environment primarily stems from the limited knowledge about the surface composition, properties, stratigraphy, and geological age of planets. Significant variations and uncertainties in the physical and structural attributes of weathered layers at different sampling locations and depths can pose considerable challenges to the design, control, and estimation of forces applied to the sampling mechanism. A key factor contributing to the failure of previous sampling missions has been the inadequate comprehension of the geological conditions of these celestial bodies. For instance, during the lunar surface sampling operation of Luna 20 in 1972, the drilling tool encountered hard rocks, leading to overheating and an early cessation of sampling (Anttila 2005). Similarly, the “mole” probe carried by the InSight lander became stuck at a depth of 35 cm while drilling into the Martian surface in 2019 (Spohn et al. 2022a). In the lunar surface sampling mission of Chang’E-5 in 2020, the team encountered tough lunar rocks, resulting in a reduced sampling depth from the planned 2 m to 1 m (Zheng et al. 2022). Sampling across diverse terrains represents both the objective and a technical challenge in the development of sampling devices. In the future, humanity also envisions sampling missions on Enceladus and Titan. Compared to the Moon and Mars, our understanding of the geological environments of these celestial bodies remains relatively limited. Consequently, the design of sampling devices faces more formidable obstacles.
(4) Communication delay
Communication delays are a disadvantage in the sampling of extraterrestrial objects. For Chang’E-5’s sampling mission, the sampling process is controlled by ground personnel in real-time. Compared to other celestial bodies, the Moon is relatively close to Earth, with a minimum communication delay of approximately 1.211 s and a maximum delay of around 1.352 s. In contrast, for other celestial bodies, the distances between them and Earth are much longer. For example, the one-way communication delay from Mars to Earth ranges from approximately 3.1 mins to a maximum of 22 mins. The prolonged communication delay makes it challenging to ensure the reliability and accuracy of real-time operations, making communication delay a crucial factor to consider in deep space exploration. The communication delay necessitates that the rover possesses autonomous navigation and obstacle avoidance capabilities. It also requires a high level of self-diagnostic and fault-repair capabilities. The drill-based sampling system should be highly intelligent, capable of evaluating and assessing the sampling environment and geology, and able to make autonomous judgments about the sampling conditions. The communication delay imposes higher demands on the accuracy and efficiency of the sampling device’s algorithms.
5 Development Trends in Drill-Based Sampling Technologies
The current drill-based sampling techniques still have many shortcomings, and the development trends in drill-based sampling technology mainly include the following aspects.
(1) Sampling integrated with ISRU technology
ISRU is a process of treating the soil or atmosphere of celestial bodies to extract resources such as water, oxygen, or methane that can be used by humans or robots (Crawford et al. 2014). ISRU aims to reduce reliance on Earth’s resources, decrease the direct cost of human lunar and Mars missions, lower payload and risk in deep space exploration, and enhance spaceflight performance. ISRU contributes to the sustainability of space exploration programs. ISRU aims to reduce reliance on Earth’s resources, decrease the direct cost of human lunar and Mars missions, lower payload and risk in deep space exploration, and enhance spaceflight performance. ISRU contributes to the sustainability of space exploration programs. Missions like Artemis and PRIME-1 include testing the feasibility of ISRU by collecting and processing volatile substances from planetary regolith. By excavating or drilling various regions on the Moon, Mars, or asteroids for water deposits, such as water ice in permanently shadowed lunar craters, polar on the lunar surface, and water within the Moon, these samples can be processed to obtain essential resources for human exploration missions. This requires drilling devices to not only perform drill-based sampling tasks but also possess capabilities for sample processing and resource extraction.
(2) Expanding the scope of celestial body sampling
Drill-based sampling apparatuses are required to penetrate deep underground for subsurface sampling. In comparison to superficial samples, deep samples are less affected by space radiation and meteorite impacts, making them closer to the pristine material within extraterrestrial bodies. The subsurface environments within extraterrestrial bodies may provide better preservation conditions, aiding in the retention of potential organic compounds, microorganisms, or other signs of life. Collecting deep samples allows for the acquisition of a more extensive range of scientific information. Enhancements in cable-based drilling devices and multi-bit linked drilling devices can extend the depth capabilities of drill-based sampling.
To procure a more diverse array of soil samples, future sampling drills are anticipated to possess the adaptability to operate in various terrains. The Moon and Mars exhibit complex and varied terrains, where sampling and analysis currently rely on rovers carrying drilling equipment, resulting in a limited range of sample types and scientific information. Nevertheless, in regions inaccessible to rovers, such as crater walls, volcanic vents, and canyons, the soil samples from these areas may contain critical scientific information, crucial for unraveling planetary evolution and searching for evidence of life. Researchers have developed a multitude of exceptional robotic systems tailored (Fig. 17) for extreme terrains, equipped with miniature drilling capabilities to facilitate exploration and sampling in complex and uncharted terrains. The drill design can also incorporate multiple drill bits that can be used in combination to address diverse terrain and geology for sample collection.

Robots for extreme terrain exploration. (a) Exobiology Extant Life Surveyor. (b) The Cooperative Autonomous Distributed Robotic Exploration. (c) Quadrupedal robots. (d) Venus Aerial Robotic Balloon. (e) Multi-Modal Mobility Morphobot. (f) DuAxel rover. (g) MANTIS: Multi-legged Manipulation and Locomotion System. (h) LEONARD. (i) LEMUR 3. (j) SherpaTT. (k) SpaceClimber. (l) Regolith Advanced Surface Systems Operations Robot Excavator. (m) Buoyant Rover for Under-Ice Exploration. (n) SUNFISH. (o) Rollocopter. (p) Autonomous Pop-Up Flat Folding Explorer Robot. (Courtesy authors, Jet Propulsion Laboratory, California Institute of Technology, German Research Center for Artificial Intelligence, Kennedy Space Center, and Stone Aerospace)
Furthermore, in the upcoming decade, humanity is also planning exploratory missions to celestial bodies with subsurface oceans such as Europa, Enceladus, and Titan. These celestial bodies exhibit vastly distinct terrain features and geological conditions compared to terrestrial landforms (Gao and Chien 2017). Consequently, the development of innovative sampling devices, such as deep-sea exploration devices, becomes imperative.
(3) Improvement of drilling device performance
The optimization of sampling devices represents a prominent trend in drill-based sampling technology. Firstly, it is imperative to conduct ground-based experiments that replicate the environmental and geological conditions found on extraterrestrial bodies. Through comprehensive experimentation, the reliability and stability of sampling devices must be validated and enhanced. Combining multiple sampling methods may also augment the success rate of sampling, ensuring the proper functionality of the sampling device on extraterrestrial bodies and the successful collection of samples. Secondly, engineers should implement improvements in the structure and operational mechanisms of sampling drills to reduce power consumption and enhance drilling and coring efficiency. Thirdly, efforts should be directed towards reducing the weight and dimensions of sampling drills, thereby lowering transportation costs and aligning with the demands of spaceflight. Lastly, it is crucial to integrate intelligent sampling capabilities. The sampling device should possess the capability to analyze and identify the geological layers within the sampling environment. Throughout the sampling process, the sampling device should continuously monitor and adjust sampling parameters in real-time, facilitating fault diagnosis and enabling self-repair.
(4) Sample fidelity
To ensure that the collected soil samples accurately represent the characteristics of the extraterrestrial bodies, the sampling equipment must incorporate effective measures for sample fidelity. During the sampling process, techniques and equipment for pressure preservation, temperature control, moisture retention, quality maintenance, and light preservation are required to maintain the original properties of the soil and to avoid unfavorable conditions such as sample fragmentation, disruption of layering structure, material volatilization, and microbial death. The design of the fidelity-preserving device should comprehensively simulate the environmental features of the sampled celestial body. Additionally, the sampling drill should be capable of avoiding contamination and cross-contamination of samples to ensure that each sample remains independent and pristine. After collection, soil samples should undergo appropriate sealing and packaging to prevent external contamination. During transportation, measures must be taken to prevent sample vibrations, thereby minimizing physical and chemical alterations. The handling and analysis of samples must also adhere to strict laboratory protocols to guarantee the fidelity of the samples.
(5) Biocontamination prevention and planetary protection
As sample return missions continue to increase, planetary protection and science contamination control should be given due attention. Forward planetary protection aims to minimize the risk of harmful contamination from Earth’s organisms to target celestial bodies and prevent inadvertent contamination of Earth’s biosphere by extraterrestrial materials. Science contamination control prevents Earth-based organisms from contaminating celestial bodies in the solar system. This contamination could either affect the accuracy of scientific results obtained from samples or potentially allow Earth-based organisms to establish colonies on these bodies before they are studied in their natural state. Adherence to planetary protection guidelines is essential to ensure the reliability of life exploration. This necessitates that sampling devices incorporate effective bio-isolation measures to prevent contamination of samples by Earth’s biological organisms. Disinfection and sterilization procedures could be applied to drilling equipment, or the sealing integrity of sample collection devices could be enhanced, to improve the contamination prevention capability of the apparatus. For instance, to return a pristine sample, the SCS hardware on Perseverance and OSIRIS-REx spacecraft sampling hardware strictly control organic, inorganic and biological contamination during the design, manufacturing, assembly and testing processes (Dworkin et al. 2017; Moeller et al. 2020). Additionally, sampling devices may require environmental monitoring capabilities to assess the ecological environment of the target celestial body. These are crucial for preserving the pristine nature of these environments and for enabling accurate scientific investigations into potential extraterrestrial life.
6 Conclusion
Extraterrestrial bodies sampling is an essential means of gaining insights into the evolution of the universe, space resource utilization, and the search for extraterrestrial life. Among various sampling methods, drilling-based sampling stands out due to its significant advantages, offering stable and reliable performance across different depths and geological conditions.
From the review, it has become apparent that drilling-based sampling on extraterrestrial bodies faces multiple constraints. These constraints encompass aviation flight restrictions, the intricate and unknown geological conditions of extraterrestrial bodies, extreme environments, and communication delays. These limitations pose significant challenges in the design of drill-based sampling devices. In response to these constraints, researchers have developed a wide array of drill-based sampling devices. Based on different drilling depths, this paper categorizes these devices into seven classes: small drills, pneumatic surface drills, single-rod drills, multi-rod drills, pneumatic deep probes, cable-based drills, and terrestrial ice penetration drills. Small drills are characterized by their compact size, low power consumption, and high sampling resolution. Pneumatic surface drills offer the advantage of easy deployment, minimal reaction forces during operation, and reduced sample contamination. Single-rod drills demonstrate reliable performance and strong adaptability to various environmental conditions. To achieve deeper sampling, the use of multi-rod connection drills and cable-based drilling devices has proven to be crucial. Although pneumatic deep probes possess the capability for deep drilling, their sampling capacity is comparatively limited. Terrestrial ice penetration drills, on the other hand, excel in penetrating ice shells and exploring sub-surface oceans, with drilling depths reaching several hundred meters.
In light of the comprehensive review, it becomes evident that intelligent control algorithms play a pivotal role in the operation of drill-based sampling devices. These intelligent control algorithms significantly improve sampling success rates and efficiency, reduce power consumption, and minimize sample damage. Moreover, the integration of in-situ resource utilization into drilling-based sampling emerges as a prominent and forward-looking trend. This strategy involves the extraction of usable resources from celestial body surfaces, thereby diminishing reliance on Earth’s resources and advancing the development of space bases for resource utilization in outer space. Additionally, the incorporation of miniaturized drilling equipment, which can be seamlessly integrated into robotic explorers designed for extreme terrains, presents an expansive array of exploration and sampling capabilities, surpassing those offered by conventional rovers. The research community recognizes the pressing need to advance the prototyping of extraterrestrial ice penetration drills, developed and tested on Earth for potential application in future missions beyond our planet. This area of exploration promises to yield critical insights and discoveries in the future. Lastly, it is imperative to underscore the significance of sample storage and transportation. These aspects are crucial for minimizing interference and preserving the pristine scientific value of collected samples during their journey back to Earth.
The exploration of extraterrestrial bodies through drilling-based sampling holds great promise and will continue to play a vital role in advancing our understanding of the cosmos and supporting future space endeavors.
References
Alkalla M, Pang X, Pitcher C, Gao Y (2021) DROD: a hybrid biomimetic undulatory and reciprocatory drill: quantitative analysis and numerical study. Acta Astronaut 182:131–143. https://doi.org/10.1016/j.actaastro.2021.02.007
Allen CC, Jager KM, Morris RV, Lindstrom DJ, Lindstrom MM, Lockwood JP (1998) JSC Mars-1: a Martian soil simulant. In: Space, vol 98, pp 469–476
Allton JH (1989) Catalog of Apollo lunar surface geological sampling tools and containers. NASA Lyndon B. Johnson Space, Center
Anand M, Crawford IA, Balat-Pichelin M, Abanades S, van Westrenen W, Péraudeau G, Jaumann R, Seboldt W (2012) A brief review of chemical and mineralogical resources on the Moon and likely initial in situ resource utilization (ISRU) applications. Planet Space Sci 74(1):42–48. https://doi.org/10.1016/j.pss.2012.08.012
Anderson RC, Jandura L, Okon AB, Sunshine D, Roumeliotis C, Beegle LW, Hurowitz J, Kennedy B, Limonadi D, McCloskey S, Robinson M, Seybold C, Brown K (2012) Collecting samples in Gale crater, Mars; an overview of the Mars Science Laboratory sample acquisition, sample processing and handling system. Space Sci Rev 170(1–4):57–75. https://doi.org/10.1007/s11214-012-9898-9
Anttila M (2005) Concept evaluation of Mars drilling and sampling instrument. Helsinki University of Technology
Anttila M, Suomela J, Saarinen J (2002) The micro ROSA2 activity–conclusion and future plans. In: Proceedings of the ASTRA 2002 conference
Backes P, Aldrich J, Zarzhitsky D, Klein K, Younse P (2012) Demonstration of autonomous coring and caching for a Mars sample return campaign concept. In: 2012 IEEE Aerospace Conference, pp 1–10
Backes P, Moreland S, Badescu M, Riccobono D, Brinkman A, Choukroun M, Molaro J, Aggerwal R, Newbold T, Ahmad A, Ubellacker S (2020) The dual-rasp sampling system for an Enceladus lander. In: 2020 IEEE Aerospace Conference, pp 1–9
Badescu M, Sherrit S, Bao X, Bar-Cohen Y Chen B (2011) Auto-Gopher: a wireline rotary-hammer ultrasonic drill. In: Sensors and smart structures technologies for civil, mechanical, and aerospace systems 2011. SPIE, Bellingham. pp 1098–1105
Badescu M, Ressa A, Lee HJ, Bar-Cohen Y, Sherrit S, Zacny K, Paulsen GL, Beegle L, Bao X (2013) Auto-Gopher: a wireline deep sampler driven by piezoelectric percussive actuator and EM rotary motor. In: Sensors and smart structures technologies for civil, mechanical, and aerospace systems 2013. SPIE, Bellingham. pp 782–789
Badescu M, Lee HJ, Sherrit S, Bao X, Bar-Cohen Y, Jackson S, Chesin J, Zacny K, Paulsen GL, Mellerowicz B, Kim D (2017) Auto-Gopher-II: an autonomous wireline rotary-hammer ultrasonic drill. In: Industrial and commercial applications of smart structures technologies 2017. SPIE, Bellingham. pp 167–175
Badescu M, Bar-Cohen Y, Sherrit S, Bao X, Jackson S, Metz B, Simonini A, Zacny K, Mellerowicz B, Kim D, Paulsen GL (2018) Auto-Gopher-II: a wireline rotary-hammer ultrasonic drill that operates autonomously. In: Sensors and smart structures technologies for civil, mechanical, and aerospace systems 2018. SPIE, Bellingham. pp 705–712
Badescu M, Bar-Cohen Y, Sherrit S, Bao X, Lee HJ, Jackson S, Metz B, Valles ZC, Zacny K, Mellerowicz B, Kim D, Paulsen GL (2019) Auto-Gopher-II: an autonomous wireline rotary-hammer ultrasonic drill test results. In: Sensors and smart structures technologies for civil, mechanical, and aerospace systems 2019. SPIE, Bellingham. pp 271–280
Banerdt WB, Smrekar SE, Banfield D, Giardini D, Golombek M, Johnson CL, Lognonné P, Spiga A, Spohn T, Perrin C, Stähler SC, Antonangeli D, Asmar S, Beghein C, Bowles N, Bozdag E, Chi P, Christensen U, Clinton J, Collins GS, Daubar I, Dehant V, Drilleau M, Fillingim M, Folkner W, Garcia RF, Garvin J, Grant J, Grott M, Grygorczuk J, Hudson T, Irving JCE, Kargl G, Kawamura T, Kedar S, King S, Knapmeyer-Endrun B, Knapmeyer M, Lemmon M, Lorenz R, Maki JN, Margerin L, McLennan SM, Michaut C, Mimoun D, Mittelholz A, Mocquet A, Morgan P, Mueller NT, Murdoch N, Nagihara S, Newman C, Nimmo F, Panning M, Pike WT, Plesa A-C, Rodriguez S, Rodriguez-Manfredi JA, Russell CT, Schmerr N, Siegler M, Stanley S, Stutzmann E, Teanby N, Tromp J, van Driel M, Warner N, Weber R, Wieczorek M (2020) Initial results from the InSight mission on Mars. Nat Geosci 13(3):183–189. https://doi.org/10.1038/s41561-020-0544-y
Bar-Cohen Y, Zacny K (2009) Drilling in extreme environments: penetration and sampling on Earth and other planets. Wiley, New York
Bar-Cohen Y, Zacny K (2021) Advances in terrestrial and extraterrestrial drilling: ground, ice, and underwater. CRC Press, Boca Raton
Bar-Cohen Y, Sherrit S, Dolgin BP, Bridges N, Bao X, Chang Z, Yen A, Saunders RS, Pal D, Kroh J, Peterson T (2001) Ultrasonic/sonic driller/corer (USDC) as a sampler for planetary exploration. In: 2001 IEEE Aerospace Conference proceedings. (Cat. No. 01TH8542). p 1/263-1/271 vol.1
Bar-Cohen Y, Badescu M, Sherrit S, Zacny K, Paulsen GL, Beegle L, Bao X (2012) Deep drilling and sampling via the wireline auto-Gopher driven by piezoelectric percussive actuator and EM rotary motor. In: Sensors and smart structures technologies for civil, mechanical, and aerospace systems 2012. SPIE, Bellingham. pp 590–597
Bar-Cohen Y, Zacny K, Badescu M, Lee HJ, Sherrit S, Bao XQ, Freeman D, Paulsen GL, Beegle L (2017) Auto-Gopher-2-wireline deep sampler driven by percussive piezoelectric actuator and rotary EM motors. Adventures Sci Technol 100:207–212. https://doi.org/10.4028/www.scientific.net/AST.100.207
Barmin IV, Shevchenko AA (1983) Soil-scooping mechanism for the Venera 13 and Venera 14 unmanned interplanetary spacecraft. Kosm Issled 21(2):171–175
Basilevsky AT, Ivanov MA, Head JW, Aittola M, Raitala J (2007) Landing on Venus: past and future. Planet Space Sci 55(14):2097–2112. https://doi.org/10.1016/j.pss.2007.09.005
Basilevsky AT, Ivanov BA, Ivanov AV, Head JW (2013) Clarification of sources of material returned by Luna 24 spacecraft based on analysis of new images of the landing site taken by lunar reconnaissance orbiter. Geochem Int 51(6):456–472. https://doi.org/10.1134/S0016702913060025
Battler MM, Spray JG (2009) The Shawmere anorthosite and OB-1 as lunar highland regolith simulants. Planet Space Sci 57(14):2128–2131. https://doi.org/10.1016/j.pss.2009.09.003
Beegle LW, Peters GH, Mungas GS, Bearman GH, Smith JA, Anderson RC (2007a) Mojave Martian simulant: a new Martian soil simulant. In: 38th Annual Lunar and Planetary Science Conference. p 2005
Beegle LW, Peters GH, Mungas GS, Bearman GH, Smith JA, Anderson RC (2007b) Mojave Martian Simulant: A New Martian Soil Simulant.:2005
Bieńkowski K, Kolimas Ł, Łapczyński S, Drogosz M, Szulborski M, Wiśniewski Ł, Kędziora B, Kozarek Ł(2020) Simulations and tests of a KRET aerospace penetrator. Energies 13(12):3291. https://doi.org/10.3390/en13123291
Bierhaus EB, Clark BC, Harris JW, Payne KS, Dubisher RD, Wurts DW, Hund RA, Kuhns RM, Linn TM, Wood JL, May AJ, Dworkin JP, Beshore E, Lauretta DS, the OSIRIS-REx Team (2018) The OSIRIS-REx spacecraft and the touch-and-go sample acquisition mechanism (TAGSAM). Space Sci Rev 214(7):107. https://doi.org/10.1007/s11214-018-0521-6
Bonitz RG, Shiraishi L, Robinson M, Arvidson RE, Chu PC, Wilson JJ, Davis KR, Paulsen G, Kusack AG, Archer D (2008) NASA Mars 2007 Phoenix lander robotic arm and icy soil acquisition device. J Geophys Res, Planets 113(E3)
Carr MH (2007) The surface of Mars. Cambridge University Press, Cambridge
Chicarro A, Martin P, Trautner R (2004) In: Wilson A, Chicarro A (eds) Mars Express: the scientific payload. ESA Special Publications, vol SP-1240. ESA Publications Division, Noordwijk, pp 3–13
Chu P, Wilson J, Davis K, Shiraishi L, Burke K (2008) Icy soil acquisition device for the 2007 Phoenix Mars lander. In: 39th aerospace mechanisms symposium
Chu P, Spring J, Zacny K (2014) ROPEC - ROtary PErcussive Coring Drill for Mars Sample Return
Ciszewski M, Buratowski T, Uhl T, Giergiel M, Seweryn K, Teper W, Zwierzyński AJ (2015) Ultralight mobile drilling system - design and analyses of a robotic platform intended for terrestrial and space applications. In: 2015 10th international workshop on robot motion and control (RoMoCo), pp 84–90
Colwell JE, Batiste S, Horányi M, Robertson S, Sture S (2007) Lunar surface: Dust dynamics and regolith mechanics. Rev Geophys 45(2). https://doi.org/10.1029/2005RG000184
Compton WD (1989) Where no man has gone before: a history of Apollo lunar exploration missions. National Aeronautics and Space Administration, Office of Management, Scientific and Technical Information Division
Crawford IA, Joy KH, Anand M (2014) Lunar exploration. In: Spohn T, Breuer D, Johnson TV (eds) Encyclopedia of the Solar System, 3rd edn. Elsevier, Boston, pp 555–579
Ding L, Zhou R, Yu T, Gao H, Yang H, Li J, Yuan Y, Liu C, Wang J, Zhao Y-YS, Wang Z, Wang X, Bao G, Deng Z, Huang L, Li N, Cui X, He X, Jia Y, Yuan B, Liu G, Zhang H, Zhao R, Zhang Z, Cheng Z, Wu F, Xu Q, Lu H, Richter L, Liu Z, Niu F, Qi H, Li S, Feng W, Yang C, Chen B, Dang Z, Zhang M, Li L, Wang X, Huang Z, Zhang J, Xing H, Wang G, Niu L, Xu P, Wan W, Di K (2022) Surface characteristics of the Zhurong Mars rover traverse at Utopia Planitia. Nat Geosci 15(3):171–176. https://doi.org/10.1038/s41561-022-00905-6
Dworkin JP, Adelman LA, Ajluni T, Andronikov AV, Aponte JC, Bartels AE, Beshore E, Bierhaus EB, Brucato JR, Bryan BH, Burton AS, Callahan MP, Castro-Wallace SL, Clark BC, Clemett SJ, Connolly HC, Cutlip WE, Daly SM, Elliott VE, Elsila JE, Enos HL, Everett DF, Franchi IA, Glavin DP, Graham HV, Hendershot JE, Harris JW, Hill SL, Hildebrand AR, Jayne GO, Jenkens RW, Johnson KS, Kirsch JS, Lauretta DS, Lewis AS, Loiacono JJ, Lorentson CC, Marshall JR, Martin MG, Matthias LL, McLain HL, Messenger SR, Mink RG, Moore JL, Nakamura-Messenger K, Nuth JA, Owens CV, Parish CL, Perkins BD, Pryzby MS, Reigle CA, Righter K, Rizk B, Russell JF, Sandford SA, Schepis JP, Songer J, Sovinski MF, Stahl SE, Thomas-Keprta K, Vellinga JM, Walker MS (2017) OSIRIS-REx contamination control strategy and implementation. Space Sci Rev 214(1):19. https://doi.org/10.1007/s11214-017-0439-4
Dyne DV, Zacny K, Thomas L, Lam S, Matsuyama Y, Sabahi D, Paulsen G, Satou Y, Kato H, Sawada H, Usui T, Fujimoto M, Imada T, Mueller RP, Zolensky M, Dudzinski L (2021) Pneumatic Sampler (P-Sampler) for the Martian Moons Exploration (MMX). Virtual
Easter P, Long-Fox J, Landsman Z, Metke A, Britt D (1980) Comparing the effects of mineralogy and particle size distribution on the angle of repose for lunar regolith simulants. In: 53rd Lunar and Planetary Science Conference, pp 1980–2022
Engelschiøn VS, Eriksson SR, Cowley A, Fateri M, Meurisse A, Kueppers U, Sperl M (2020) EAC-1A: a novel large-volume lunar regolith simulant. Sci Rep 10(1):5473. https://doi.org/10.1038/s41598-020-62312-4
Eshelman E, Bhartia R, Wanger G, Willis M, Carrier B, Abbey W, Malaska M, Beegle LW, DeFlores L, Priscu J (2017) Wireline analysis tool for subsurface observation of northern ice sheets (WATSON). In: 48th Annual Lunar and Planetary Science Conference. p 2326
Farley KA, Williford KH, Stack KM, Bhartia R, Chen A, de la Torre M, Hand K, Goreva Y, Herd CDK, Hueso R, Liu Y, Maki JN, Martinez G, Moeller RC, Nelessen A, Newman CE, Nunes D, Ponce A, Spanovich W, Willis PA, Beegle LW, Bell JF, Brown AJ, Hamran S-E, Hurowitz JA, Maurice S, Paige DA, Rodriguez-Manfredi JA, Schulte M, Wiens RC (2020) Mars 2020 mission overview. Space Sci Rev 216(8):142. https://doi.org/10.1007/s11214-020-00762-y
Finzi AE, Zazzera FB, Dainese C, Malnati F, Magnani PG, Re E, Bologna P, Espinasse S, Olivieri A (2007) SD2–how to sample a comet. Space Sci Rev 128:281–299. https://doi.org/10.1007/s11214-006-9134-6
Gao Y, Chien S (2017) Review on space robotics: toward top-level science through space exploration. Sci Robot 2(7):eaan5074. https://doi.org/10.1126/scirobotics.aan5074
Glass B, Cannon H, Hanagud S, Lee P, Paulsen G (2006) In: Drilling automation tests at a lunar/Mars analog site, League City, TX
Glass B, Cannon H, Branson M, Hanagud S, Paulsen G (2008) DAME: planetary-prototype drilling automation. Astrobiology 8(3):653–664. https://doi.org/10.1089/ast.2007.0148
Glass BJ, Dave A, McKay CP, Paulsen G (2014b) Robotics and automation for “icebreaker.”. J Field Robot 31(1):192–205. https://doi.org/10.1002/rob.21487
Glass B, Wang A, Huffman S, Zacny K, Lee P (2014a) Testing of a Mars-prototype drill at an analog site. In: Gertsch LS, Malla RB (eds) Earth and space 2014. American Society of Civil Engineers, Reston, VA, pp 210–217. https://doi.org/10.1061/9780784479179.024
Glass B, Mellerowicz B, Davis A, Zacny K, McKay C, Dave A, Lee P (2015) Icebreaker-3 Mars-analog sample acquisition tests. In: 46th Annual Lunar and Planetary Science Conference, p 1669
Glassmeier K-H, Boehnhardt H, Koschny D, Kührt E, Richter I (2007) The Rosetta mission: flying towards the origin of the Solar System. Space Sci Rev 128(1):1–21. https://doi.org/10.1007/s11214-006-9140-8
Gorevan SP, Myrick TM, Batting C, Mukherjee S, Bartlett P, Wilson J (2003) Strategies for future Mars exploration: an infrastructure for the near and longer-term future exploration of the subsurface of Mars. In: Proceedings of the 6th international conference on Mars, pp 20–25
Gouache TP, Patel N, Brunskill C, Scott GP, Saaj CM, Matthews M, Cui L (2011) Soil simulant sourcing for the ExoMars rover testbed. Planet Space Sci 59(8):779–787. https://doi.org/10.1016/j.pss.2011.03.006
Grotzinger JP, Crisp J, Vasavada AR, Anderson RC, Baker CJ, Barry R, Blake DF, Conrad P, Edgett KS, Ferdowski B, Gellert R, Gilbert JB, Golombek M, Gómez-Elvira J, Hassler DM, Jandura L, Litvak M, Mahaffy P, Maki J, Meyer M, Malin MC, Mitrofanov I, Simmonds JJ, Vaniman D, Welch RV, Wiens RC (2012) Mars Science Laboratory mission and science investigation. Space Sci Rev 170(1–4):5–56. https://doi.org/10.1007/s11214-012-9892-2
Grygorczuk J, Banaszkiewicz M, Kargl G, Kömle N, Ball A, Seweryn K (2009) Use of hammering to determine cometary nucleus mechanical properties. In: Kargl G et al. (eds) Penetrometry Sol Syst II Austrian Academy of Sciences, Vienna, pp 93–107
Grygorczuk J, Dobrowolski M, Wisniewski L, Banaszkiewicz M, Ciesielska M, Kedziora B, Seweryn K, Wawrzaszek R, Wierzchon T, Trzaska M (2011) Advanced mechanisms and tribological tests of the hammering sampling device CHOMIK. In: Proceedings of the 14th European space mechanisms and tribology symposium (ESMATS), Constance, Germany
Grygorczuk J, Kedziora B, Wisniewski L (2016) A multi-sectioning, reconfigurable electromagnetic hammering propulsion for mole penetrators. In: Proceedings of the 43rd aerospace mechanisms symposium. NASA Ames Research, Center
Guerrero V, Stone W, Siegel V, Hogan B, Richmond K, Harman J, Myers K, Lelievre S, Flesher C, Ralston J, Tanner N, Wright N, Smith J, Price R, Moor J, Alexander M, Lopez A (2022) Project THOR: Test Results for a Full-Scale, Nuclear-Compatible Ocean World Ice Penetrator. Display
Harvey B (2006) Soviet and Russian lunar exploration. Springer, Berlin. https://doi.org/10.1007/978-0-387-73976-2
He XX, Xiao L, Huang J, Wan CH, Wu T, Gao R, Yan SW, He Q (2010) Lunar regolith simulant CUG-1A. In: 41st Annual Lunar and Planetary Science Conference, p 1183
He C, Zeng X, Wilkinson A (2013) Geotechnical properties of GRC-3 lunar simulant. J Aerosp Eng 26(3):528–534. https://doi.org/10.1061/(ASCE)AS.1943-5525.0000162
Hecht MH, Kounaves SP, Quinn RC, West SJ, Young SM, Ming DW, Catling DC, Clark BC, Boynton WV, Hoffman J (2009) Detection of perchlorate and the soluble chemistry of Martian soil at the Phoenix lander site. Science 325(5936):64–67. https://doi.org/10.1126/science.1172466
Heiken GH, Vaniman DT, French BM (1991) Lunar sourcebook, a user’s guide to the Moon. Cambridge University Press, Cambridge
Hildebrandt M, Arnold S, Kloss P, Wehbe B, Zipper M (2020) From epi- to bathypelagic: transformation of a compact AUV system for long-term deployments. In: 2020 IEEE/OES Autonomous Underwater Vehicles symposium (AUV), pp 1–6
Hildebrandt M, Creutz T, Wehbe B, Wirtz M, Zipper M (2022) Under-ice field tests with an AUV in Abisko/Torneträsk. In: OCEANS 2022, Hampton Roads, VA, USA. IEEE. pp 1–7
Hooper DM, Ximenes SW, Wells R, Necsoiu M, Patrick EL (2020) Introduction of LCATS-1, a geotechnical lunar regolith simulant for multi-purpose utilization. In: 51st Annual Lunar and Planetary Science Conference. p 2548
Hou X, Ding T, Cao K, Chen T, Li L, Yu Z, Deng Z (2019) Research on multi-pipe drilling and pneumatic sampling technology for deep Martian soil. Adv Space Res 64(1):211–222. https://doi.org/10.1016/j.asr.2019.03.019
Howell SM, Pappalardo RT (2020) NASA’s Europa Clipper—a mission to a potentially habitable ocean world. Nat Commun 11(1):1311. https://doi.org/10.1038/s41467-020-15160-9
Isaka K, Tsumura K, Watanabe T, Toyama W, Okui M, Yoshida H, Nakamura T (2020) Clay drilling performance of seabed robotic explorer using peristaltic motion. In: 2020 IEEE/SICE international Symposium on System Integration (SII), pp 1340–1347
Jandura L (2010) Mars Science Laboratory sample acquisition. In: Sample processing and handling: subsystem design and test challenges
Jiang M, Li L, Sun Y (2012) Properties of TJ-1 lunar soil simulant. J Aerosp Eng 25(3):463–469. https://doi.org/10.1061/(ASCE)AS.1943-5525.0000129
Jiang S, Liang J, Lai X, Deng X, Pang Y, Zhang W, Tang J, Quan Q, Peng J, Zhang G, Deng Z (2022) Analysis on drilling and coring process and lunar regolith stratification state interpretation in Chang’E-5 Chin J Mech Eng 58(10):348–360 https://doi.org/10.3901/JME.2022.10.348.
Jie D, Zhang W, Jiang S, Chen H, Shen Y, Quan Q, Hou X, Deng Z (2015) Research on design of creepy-boring type subsurface investigation device for planetary exploration. J Deep Space Explor 2(1):88–93. https://doi.org/10.15982/j.issn.2095-7777.2015.01.013
Jin W, Detian LI, Kun LIU, Chunjie YAN, Gang Q, Chunyong W (2022) The technical advance and development suggestions for extraterrestrial object sampling and sealing technologies. Chin Phys Lett. https://doi.org/10.13922/j.cnki.cjvst.202210018
Just GH, Joy KH, Roy MJ, Smith KL (2020) Geotechnical characterisation of two new low-fidelity lunar regolith analogues (UoM-B and UoM-W) for use in large-scale engineering experiments. Acta Astronaut 173:414–424. https://doi.org/10.1016/j.actaastro.2020.04.025
Kanamori H, Udagawa S, Yoshida T, Matsumoto S, Takagi K (2012) In: Properties of lunar soil simulant manufactured in Japan, pp 462–468. https://doi.org/10.1061/40339(206)53
Kawakatsu Y, Kuramoto K, Usui T, Sugahara H, Ootake H, Yasumitsu R, Yoshikawa K, Mary S, Grebenstein M, Sawada H, Imada T, Shimada T, Ogawa K, Otsuki M, Baba M, Fujita K, Zacny K, van Dyne D, Satoh Y, Tokaji A (2023) Preliminary design of Martian Moons eXploration (MMX). Acta Astronaut 202:715–728. https://doi.org/10.1016/j.actaastro.2022.09.009
King RH, Van Susante P, Gefreh MA (2011) Analytical models and laboratory measurements of the soil–tool interaction force to push a narrow tool through JSC-1A lunar simulant and Ottawa sand at different cutting depths. J Terramech 48(1):85–95. https://doi.org/10.1016/j.jterra.2010.07.003
Lee J, Tirtawardhana C, Myung H (2023) Performance verification of biomimetic mole robot (mole-bot) for efficient underground exploration. In: Jo J et al. (eds) Robot intelligence technology and applications 7 (RiTA 2022). Lecture Notes in Networks and Systems, vol 642. Springer, Cham, pp 321–330. https://doi.org/10.1007/978-3-031-26889-2_29
Leshin LA, Mahaffy PR, Webster CR, Cabane M, Coll P, Conrad PG, Archer PD Jr, Atreya SK, Brunner AE, Buch A (2013) Volatile, isotope, and organic analysis of Martian fines with the Mars Curiosity rover. Science 341(6153):1238937. https://doi.org/10.1126/science.1238937
Li Y, Liu J, Yue Z (2009) NAO-1: lunar highland soil simulant developed in China. J Aerosp Eng 22(1):53–57. https://doi.org/10.1061/(ASCE)0893-1321(2009)22:1(53)
Li Q, Longchen D, Hui G (2014) Correction and application of lunar soil simulation surface sampling based on experiments. Explor Eng Soil Drill Tunneling 41(9):75–80
Li P, Jiang S, Tang D Xu B Ma C Zhang H Qin H Deng Z (2017) Design and testing of coring bits on drilling lunar rock simulant. Adv Space Res 59(4):1057–1076. https://doi.org/10.1016/j.asr.2016.11.012
Li C, Su Y, Pettinelli E, Xing S, Ding C, Liu J, Ren X, Lauro SE, Soldovieri F, Zeng X, Gao X, Chen W, Dai S, Liu D, Zhang G, Zuo W, Wen W, Zhang Z, Zhang X, Zhang H (2020) The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 lunar penetrating radar. Sci Adv 6(9):eaay6898. https://doi.org/10.1126/sciadv.aay6898
Li C, Zheng Y, Wang X, Zhang J, Wang Y, Chen L, Zhang L, Zhao P, Liu Y, Lv W, Liu Y, Zhao X, Hao J, Sun W, Liu X, Jia B, Li J, Lan H, Fa W, Pan Y, Wu F (2022a) Layered subsurface in utopia basin of Mars revealed by Zhurong rover radar. Nature 610(7931):308–312. https://doi.org/10.1038/s41586-022-05147-5
Li R, Zhou G, Yan K, Chen J, Chen D, Cai S, Mo P-Q (2022b) Preparation and characterization of a specialized lunar regolith simulant for use in lunar low gravity simulation. Int J Min Sci Technol 32(1):1–15. https://doi.org/10.1016/j.ijmst.2021.09.003
Linke S, Windisch L, Kueter N, Wanvik JE, Voss A, Stoll E, Schilde C, Kwade A (2020) TUBS-M and TUBS-T based modular regolith simulant system for the support of lunar ISRU activities. Planet Space Sci 180:104747. https://doi.org/10.1016/j.pss.2019.104747
Liu Y, Weinberg B, Mavroidis C (2008) Mechanical design and modelling of a robotic planetary drilling system. In: 30th Annual Mechanisms and Robotics Conference. ASME, pp 925–932. https://doi.org/10.1115/DETC2006-99699
Lorenz RD, Turtle EP, Barnes JW, Trainer MG, Adams DS, Hibbard KE, Sheldon CZ, Zacny K, Peplowski PN, Lawrence DJ (2018) Dragonfly: a rotorcraft lander concept for scientific exploration at Titan. Johns Hopkins APL Tech Dig 34(3):14
MacKenzie SM, Neveu M, Davila AF, Lunine JI, Craft KL, Cable ML, Phillips-Lander CM, Hofgartner JD, Eigenbrode JL, Waite JH, Glein CR, Gold R, Greenauer PJ, Kirby K, Bradburne C, Kounaves SP, Malaska MJ, Postberg F, Patterson GW, Porco C, Núñez JI, German C, Huber JA, McKay CP, de Vera J-P, Brucato JR, Spilker LJ (2021) The Enceladus orbilander mission concept: balancing return and resources in the search for life. Planet Sci J 2(2):77. https://doi.org/10.3847/PSJ/abe4da
Magnani PG, Re E, Ylikorpi T, Cherubini G, Olivieri A (2004) Deep drill (DeeDri) for Mars application. Planet Space Sci 52(1):79–82. https://doi.org/10.1016/j.pss.2003.08.023
Magnani PG, Re E, Senese S, Cherubini G, Olivieri A (2006) Different drill tool concepts. Acta Astronaut 59(8):1014–1019. https://doi.org/10.1016/j.actaastro.2005.07.028
Magnani P, Re E, Fumagalli A, Senese S, Ori GG, Gily A, Baglioni P (2011) Testing of ExoMars EM drill tool in Mars analogous materials. In: 11th Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA 2011). ESA/ESTEC, Noordwijk
Magnani P, Bologna P, Ercoli A, Di Lizia P, Bernelli Zaera F, Nista A, Olivieri A, Mugnuolo R (2015) Rosetta Philae SD2 drill system and its operation on 67P/Churyumov-Gerasimenko. In: 13th ESA/ESTEC Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA 2015). ESA/ESTEC, Nordwijk
Malaska MJ, Bhartia R, Manatt KS, Priscu JC, Abbey WJ, Mellerowicz B, Palmowski J, Paulsen GL, Zacny K, Eshelman EJ, D’Andrilli J (2020) Subsurface in situ detection of microbes and diverse organic matter hotspots in the Greenland ice sheet. Astrobiology 20(10):1185–1211. https://doi.org/10.1089/ast.2020.2241
Marzulli V, Cafaro F (2019) Geotechnical properties of uncompacted DNA-1A lunar simulant. J Aerosp Eng 32(2):04018153. https://doi.org/10.1061/(ASCE)AS.1943-5525.0000983
McKay DS, Carter JL, Boles WW, Allen CC, Allton JH (1994) JSC-1: a new lunar soil simulant. Eng Constr Oper Space IV 2:857–866
McKay CP, Stoker CR, Glass BJ, Davé AI, Davila AF, Heldmann JL, Marinova MM, Fairen AG, Quinn RC, Zacny KA, Paulsen G, Smith PH, Parro V, Andersen DT, Hecht MH, Lacelle D, Pollard WH (2013) The icebreaker life mission to Mars: a search for biomolecular evidence for life. Astrobiology 13(4):334–353. https://doi.org/10.1089/ast.2012.0878
Mellerowicz BL, Zacny K, Eshelman E, Bhartia R, Willis M, Priscu J, Huddleston R, Ngo P, Wang A, Paulsen G, Kim D, Ridilla A, Malaska M, Abbey W, Wanger G, Beagle L, DeFlores L, Lane A, Manatt K, Carrier B, Doloboff I (2018) Development of a deep drill system with integrated deep UV/Raman spectrometer for Mars and Europa. In: 2018 AIAA SPACE and astronautics forum and exposition. American Institute of Aeronautics and Astronautics, Orlando
Mellerowicz B, Zacny K, Palmowski J, Bradley B, Stolov L, Vogel B, Ware L, Yen B, Sabahi D, Ridilla A, Nguyen H, Faris D, van Susante P, Johnson G, Putzig NE, Hecht M (2022) RedWater: water mining system for Mars. New Space 10(2):166–186. https://doi.org/10.1089/space.2021.0057
Wu M (2014) Development and experimental study of drilling & coring mechanism for lunar soil test system. Dissertation, Harbin Institute of Technology
Millwater C, Long-Fox J, Landsman Z, Metke A, Britt D (2022) Direct sheer measurements of lunar regolith simulants LHS-1, LHS-1D, LMS-1, and LMS-1D. In: 53rd Lunar and Planetary Science Conference. p 2038
Moeller RC, Jandura L, Rosette K, Robinson M, Samuels J, Silverman M, Brown K, Duffy E, Yazzie A, Jens E, Brockie I, White L, Goreva Y, Zorn T, Okon A, Lin J, Frost M, Collins C, Williams JB, Steltzner A, Chen F, Biesiadecki J (2020) The sampling and caching subsystem (SCS) for the scientific exploration of Jezero crater by the Mars 2020 Perseverance rover. Space Sci Rev 217(1):5. https://doi.org/10.1007/s11214-020-00783-7
Moore HJ, Jakosky BM (1989) Viking landing sites, remote-sensing observations, and physical properties of Martian surface materials. Icarus 81(1):164–184. https://doi.org/10.1016/0019-1035(89)90132-2
Nagaoka K, Kubota T, Otsuki M, Tanaka S (2008) Experimental study on autonomous burrowing screw robot for subsurface exploration on the Moon. In: 2008 IEEE/RSJ international conference on intelligent robots and systems, pp 4104–4109
Nagaoka K, Kubota T, Otsuki M, Tanaka S (2010) Experimental analysis of a screw drilling mechanism for lunar robotic subsurface exploration. Adv Robot 24(8–9):1127–1147. https://doi.org/10.1163/016918610X501255
Nagihara S, Zacny K, Siegler M (2021) Heat flow measurements planned for upcoming robotic lunar-landing missions. In: AGU Fall Meeting abstracts. pp P54C-04
National Academies of Sciences E (2022) Origins, worlds, and life: a decadal strategy for planetary science and astrobiology 2023-2032
Nesnas IAD, Matthews JB, Abad-Manterola P, Burdick JW, Edlund JA, Morrison JC, Peters RD, Tanner MM, Miyake RN, Solish BS, Anderson RC (2012) Axel and DuAxel rovers for the sustainable exploration of extreme terrains. J Field Robot 29(4):663–685. https://doi.org/10.1002/rob.21407
Ngo P, Nagihara S, Sanigepalli V, Sanasarian L, Zacny K (2019) Heat flow probe for short-duration lander missions under NASA’s commercial lunar payload service program. In: AGU Fall Meeting abstracts. pp P33C-05
Ngo P, Sanigepalli V, Zasadzien M, Castle C, Wang A, Heidt N, Shmavonian A, Chow P, Dearing S, Becerra J (2022) Engineering and test development of heat flow probe and pneumatic drill for lunar lander mission to mare crisium. LPI Contrib 2678:2587
O’Neil WJ, Cazaux C (2000) The Mars sample return project. Acta Astronaut 47(2–9):453–465. https://doi.org/10.1016/S0094-5765(00)00085-0
Oravec HA, Zeng X, Asnani VM (2010) Design and characterization of GRC-1: a soil for lunar terramechanics testing in Earth-ambient conditions. J Terramech 47(6):361–377. https://doi.org/10.1016/j.jterra.2010.04.006
Palmowski J, Zacny K, Mellerowicz B, Vogel B, Bocklund A, Stolov L, Yen B, Sabahi D, Ware L, Faris D (2021) RedWater: extraction of water from Mars’ ice deposits. In: Earth and space 2022, pp 355–362
Palmowski J, Zacny K, Stolov L, Bywaters K (2022) REBELS: Rapidly excavated borehole for exploring lunar subsurface. p 2265
Pang Y, Liu Z, Li X (2012) Design and analysis of automatic drilling sampling mechanism for lunar exploration. Zhongguo Kongjian Kexue JishuChinese Space Sci Technol 32:16–22. https://doi.org/10.3780/j.issn.1000-758X.2012.06.003
Paśko P, Seweryn K, Abramik S (2016) Regolith sampling and deep drilling in low gravity environment. In: Proceedings of i-SAIRAS 2016, Beijing, China. ESA/ESTEC, Nordwijk
Paulsen GL, Mumm E, Kennedy T, Chu P, Davis K, Frader-Thompson S, Petrich K, Glass B (2006) Development of autonomous drills for planetary exploration. In: 37th Annual Lunar and Planetary Science Conference, p 2358
Paulsen G, Zacny K, McKay C, Shiraishi L, Kriechbaum K, Glass B, Szczesiak M, Santoro C, Craft J, Malla RB (2010) Rotary-percussive deep drill for planetary applications. In: Earth and space 2010: engineering, science, construction, and operations in challenging environments, pp 1423–1436
Paulsen G, Zacny K, Kim D, Mank Z, Wang A, Thomas T, Hyman C, Mellerowicz B, Yaggi B, Fitzgerald Z (2017) TRL6 lunar resource prospector drill. In: 48th Annual Lunar and Planetary Science Conference, p 1362
Perko HA, Nelson JD, Green JR (2006) Mars soil mechanical properties and suitability of Mars soil simulants. J Aerosp Eng 19(3):169–176. https://doi.org/10.1061/(ASCE)0893-1321(2006)19:3(169)
Peters GH, Abbey W, Bearman GH, Mungas GS, Smith JA, Anderson RC, Douglas S, Beegle LW (2008) Mojave Mars simulant—characterization of a new geologic Mars analog. Icarus 197(2):470–479. https://doi.org/10.1016/j.icarus.2008.05.004
Pitcher C (2016) Advancing the Dual Reciprocating Drill Design for Efficient Planetary Subsurface Exploration. PhD thesis. University of Surrey
Prieto-Ballesteros O, Martínez-Frías J, Schutt J, Sutter B, Heldmann JL, Bell MS, Battler M, Cannon H, Gómez-Elvira J, Stoker CR (2008) The subsurface geology of Río Tinto: material examined during a simulated Mars drilling mission for the Mars Astrobiology Research and Technology Experiment (MARTE). Astrobiology 8(5):1013–1021. https://doi.org/10.1089/ast.2006.0107
Pullan D, Sims MR, Wright IP, Pillinger CT, Trautner R (2004) Beagle 2: the exobiological lander of Mars Express. In: Wilson A, Chicarro A (eds) Mars Express: the scientific payload. ESA Special Publications, vol SP-1240. ESA Publications Division, Noordwijk, pp 165–204
Qian LI, Hui GAO, Lanlan XIE, Songcheng TAN, Longchen D (2021) Review of research about lunar drilling technology. Drill Eng 48(1):15–34. https://doi.org/10.12143/j.ztgc.2021.01.004.
Re E, Magnani PG, Ylikorpi T, Cherubini G, Olivieri A (2002) DeeDri drill tool prototype and drilling system development for Mars soil sampling applications. In: ASTRA2002 conference, ESA ESTEC, pp 1–8
Reiter JW, Guerrero JL, Wu D, Wang GY (2005) Advanced planetary drill technology and applications to future space missions. In: Space resources roundtable VII: LEAG conference on lunar exploration. pp 75
Richmond K, Hogan B, Lopez A, Harman J, Myers K, Guerrero V, Lanford E, Ralston J, Tanner N, Siegel V, Stone W (2022). PROMETHEUS: Progress Toward an Integrated Cryobot for Ocean World Access. Planetology
Richter L, Coste P, Gromov VV, Kochan H, Nadalini R, Ng TC, Pinna S, Richter H-E, Yung KL (2002) Development and testing of subsurface sampling devices for the Beagle 2 lander. Planet Space Sci 50(9):903–913. https://doi.org/10.1016/S0032-0633(02)00066-1
Richter L, Coste P, Gromov V, Grzesik A (2004) The mole with sampling mechanism (MSM)–technology development and payload of Beagle 2 Mars lander. In: 8th ESA workshop on Advanced Space Technologies for Robotics and Automation (ASTRA 2004), ESA/ESTEC, Noordwijk
Ryu B-H, Wang C-C, Chang I (2018) Development and geotechnical engineering properties of KLS-1 lunar simulant. J Aerosp Eng 31(1):04017083. https://doi.org/10.1061/(ASCE)AS.1943-5525.0000798
Sagdeev RZ, Zakharov AV (1989) Brief history of the Phobos mission. Nature 341(6243):581–585. https://doi.org/10.1038/341581a0
Savoia M, Rusconi A, Rizzi F, Fumagalli A, Zamboni A, Barber S, Fisackerly R, Carpenter J, Lavagna M (2016) PROSPECT: key aspects of drilling and collecting samples at moon south pole for Luna. Resurs Mission
Sawada H, Okazaki R, Tachibana S, Sakamoto K, Takano Y, Okamoto C, Yano H, Miura Y, Abe M, Hasegawa S, Noguchi T, Hayabusa2 SMP Team (2017) Hayabusa2 sampler: Collection of Asteroidal Surface Material. Space Sci Rev 208(1):81–106. https://doi.org/10.1007/s11214-017-0338-8
Sawada H, Kato H, Satou Y, Yoshikawa K, Usui T, Sugahara H, Takano A, Sakamoto F, Miyaoka M, Kuratomi T (2021) The MMX Sampler for Phobos Sample Return Mission. In: 2021 IEEE Aerospace Conference (50100). pp 1–8
Scott G, Saaj C (2009) Measuring and simulating the effect of variations in soil properties on microrover trafficability. In: AIAA SPACE 2009 conference & exposition, p 6468
Scott GP, Saaj CM (2012) The development of a soil trafficability model for legged vehicles on granular soils. J Terramech 49(3):133–146. https://doi.org/10.1016/j.jterra.2011.12.002
Sefton-Nash E, Fisackerly R, Trautner R, Barber S, Reiss P, Martin D, Orgel C, Heather D, Carpenter J, Houdou B (2020) The ESA PROSPECT. payload for Luna 27: development status
Seweryn K, Banaszkiewicz M, Bednarz S, Ciesielska M, Gonet A, Grygorczuk J, Kuciński T, Rybus T, Rzyczniak M, Wawrzaszek R, Wisniewski Ł, Wójcikowski M (2013) The experimental results of the functional tests of the mole penetrator KRET in different regolith analogues. In: Sąsiadek J (ed) Aerospace robotics: selected papers from I conference on robotics in aeronautics and astronautics. Springer, Berlin, pp 163–171. https://doi.org/10.1007/978-3-642-34020-8_13
Shaw A, Arvidson RE, Bonitz R, Carsten J, Keller HU, Lemmon MT, Mellon MT, Robinson M, Trebi-Ollennu A (2009) Phoenix soil physical properties investigation. J Geophys Res, Planets 114(E1)
Shen Y, Zhou M, Dang Z, Chen B, Li Y (2023) Trafficability analysis for Mars rover: present and development. Opt Precis Eng 31(5):729–745
Siegel V, Stone W, Hogan B, Flesher C, Lopez A, Richmond K (2022) ARCHIMEDES—Direct Laser Penetration of Ice for Ocean Worlds, Martian Polar Caps, and Terrestrial Ices. Authorea Prepr
Slyuta E (2021) The Luna program. In: Longobardo A (ed) Sample return missions: the last frontier of solar system exploration. Elsevier, Amsterdam, pp 37–78. https://doi.org/10.1016/B978-0-12-818330-4.00003-3
Smith PH, Tamppari L, Arvidson RE, Bass D, Blaney D, Boynton W, Carswell A, Catling D, Clark B, Duck T, DeJong E, Fisher D, Goetz W, Gunnlaugsson P, Hecht M, Hipkin V, Hoffman J, Hviid S, Keller H, Kounaves S, Lange CF, Lemmon M, Madsen M, Malin M, Markiewicz W, Marshall J, McKay C, Mellon M, Michelangeli D, Ming D, Morris R, Renno N, Pike WT, Staufer U, Stoker C, Taylor P, Whiteway J, Young S, Zent A (2008) Introduction to special section on the Phoenix Mission: Landing Site Characterization Experiments, Mission Overviews, and Expected Science. J Geophys Res, Planets 113(E3). https://doi.org/10.1029/2008JE003083
Sotin C, Kalousová K, Tobie G (2021) Titan’s interior structure and dynamics after the Cassini-Huygens mission. Annu Rev Earth Planet Sci 49(1):579–607. https://doi.org/10.1146/annurev-earth-072920-052847
Spohn T, Grott M, Smrekar SE, Knollenberg J, Hudson TL, Krause C, Müller N, Jänchen J, Börner A, Wippermann T, Krömer O, Lichtenheldt R, Wisniewski L, Grygorczuk J, Fittock M, Rheershemius S, Spröwitz T, Kopp E, Walter I, Plesa AC, Breuer D, Morgan P, Banerdt WB (2018) The heat flow and physical properties package (HP3) for the InSight mission. Space Sci Rev 214(5):96. https://doi.org/10.1007/s11214-018-0531-4
Spohn T, Hudson TL, Marteau E, Golombek M, Grott M, Wippermann T, Ali KS, Schmelzbach C, Kedar S, Hurst K, Trebi-Ollennu A, Ansan V, Garvin J, Knollenberg J, Müller N, Piqueux S, Lichtenheldt R, Krause C, Fantinati C, Brinkman N, Sollberger D, Delage P, Vrettos C, Reershemius S, Wisniewski L, Grygorczuk J, Robertsson J, Edme P, Andersson F, Krömer O, Lognonné P, Giardini D, Smrekar SE, Banerdt WB (2022a) The InSight HP3 penetrator (mole) on Mars: soil properties derived from the penetration attempts and related activities. Space Sci Rev 218(8):72. https://doi.org/10.1007/s11214-022-00941-z
Spohn T, Hudson TL, Witte L, Wippermann T, Wisniewski L, Kedziora B, Vrettos C, Lorenz RD, Golombek M, Lichtenheldt R, Grott M, Knollenberg J, Krause C, Fantinati C, Nagihara S, Grygorczuk J (2022b) The InSight-HP3 mole on Mars: lessons learned from attempts to penetrate to depth in the Martian soil. Adv Space Res 69(8):3140–3163. https://doi.org/10.1016/j.asr.2022.02.009
Spring J, Zacny K, Betts B, Chu P, Heidenberger I, Luczek K, Ford S, Peekema A, Traeden N, Garcia RA (2019) PlanetVac xodiac: lander foot pad integrated planetary sampling system. In: 2019 IEEE Aerospace Conference, pp 1–9
Stoker CR, Lemke LG, Cannon H, Glass B, Dunagan S, Zavaleta J, Miller D, Gomez-Elvira J (2005) Field Simulation of a Drilling Mission to Mars to Search for Subsurface Life
Stoker CR, Cannon HN, Dunagan SE, Lemke LG, Glass BJ, Miller D, Gomez-Elvira J, Davis K, Zavaleta J, Winterholler A, Roman M, Rodriguez-Manfredi JA, Bonaccorsi R, Bell MS, Brown A, Battler M, Chen B, Cooper G, Davidson M, Fernández-Remolar D, Gonzales-Pastor E, Heldmann JL, Martínez-Frías J, Parro V, Prieto-Ballesteros O, Sutter B, Schuerger AC, Schutt J, Rull F (2008) The 2005 MARTE robotic drilling experiment in Río Tinto, Spain: objectives, approach, and results of a simulated mission to search for life in the Martian subsurface. Astrobiology 8(5):921–945. https://doi.org/10.1089/ast.2007.0217
Stolov L, Zacny K, Heldmann J, Bywaters K, Kwok S, Fortuin C, Colaprete A, Dave A, Elphic R, Kemp D, Chin KB (2023) SMART: instrumented drill for ISRU investigations on the Moon. American Society of Civil Engineers, pp 423–436
Suescun-Florez E, Roslyakov S, Iskander M, Baamer M (2015) Geotechnical properties of BP-1 lunar regolith simulant. J Aerosp Eng 28(5). https://doi.org/10.1061/(ASCE)aS.1943-5525.0000462
Sullivan R, Anderson R, Biesiadecki J, Bond T, Stewart H (2011) Cohesions, friction angles, and other physical properties of Martian regolith from Mars Exploration Rover wheel trenches and wheel scuffs. J Geophys Res, Planets 116(E2)
Sun X, Zhang R, Li X, Zou M, Wang C, Chen L (2022) JLU-H: a novel lunar highland regolith simulant for use in large-scale engineering experiments. Planet Space Sci 221:105562. https://doi.org/10.1016/j.pss.2022.105562
Suomela J, Saarinen J, Halme A, Anttila M, Laitinen S, Kaarmila P, Visentin G (2002) Micro robots for scientific applications 2 – development of a robotic sampling system. IFAC Proc Vol, 35, 93–98. https://doi.org/10.1016/S1474-6670(17)33924-1
Timoney R, Worrall K, Firstbrook D, Harkness P, Rix J, Ashurst D, Mulvaney R, Bentley MJ (2020) A low resource subglacial bedrock sampler: the percussive rapid access isotope drill (P-RAID). Cold Reg Sci Technol 177:103113. https://doi.org/10.1016/j.coldregions.2020.103113
Tretyakov V, Mitrofanov I, Zeleniy L (2020) Russian Lunar Landers Luna-25 and Lna-27: goals of the missions and scientific investigations at Moon Polar Regions.:6753 https://doi.org/10.5194/egusphere-egu2020-6753
Ulamec S, Kucherenko V, Biele J, Bogatchev A, Makurin A, Matrossov S (2011) Hopper concepts for small body landers. Adv Space Res 47(3):428–439. https://doi.org/10.1016/j.asr.2010.09.013
Vago J, Gardini B, Kminek G, Baglioni P, Gianfiglio G, Santovincenzo A, Bayon S, van Winnendael M (2006) ExoMars-searching for life on the Red Planet. ESA Bull 126:16–23
Vago JL, Westall F, Pasteur Instrument Teams LSSWG and Other Contributors, Contributors O, Coates AJ, Jaumann R, Korablev O, Ciarletti V, Mitrofanov I, Josset J-L, De Sanctis MC, Bibring J-P, Rull F, Goesmann F, Steininger H, Goetz W, Brinckerhoff W, Szopa C, Raulin F, Westall F, Edwards HGM, Whyte LG, Fairén AG, Bibring J-P, Bridges J, Hauber E, Ori GG, Werner S, Loizeau D, Kuzmin RO, Williams RME, Flahaut J, Forget F, Vago JL, Rodionov D, Korablev O, Svedhem H, Sefton-Nash E, Kminek G, Lorenzoni L, Joudrier L, Mikhailov V, Zashchirinskiy A, Alexashkin S, Calantropio F, Merlo A, Poulakis P, Witasse O, Bayle O, Bayón S, Meierhenrich U, Carter J, García-Ruiz JM, Baglioni P, Haldemann A, Ball AJ, Debus A, Lindner R, Haessig F, Monteiro D, Trautner R, Voland C, Rebeyre P, Goulty D, Didot F, Durrant S, Zekri E, Koschny D, Toni A, Visentin G, Zwick M, van Winnendael M, Azkarate M, Carreau C, the EPT (2017) Habitability on early Mars and the search for biosignatures with the ExoMars rover. Astrobiology 17(6–7):471–510. https://doi.org/10.1089/ast.2016.1533
Van Winnendael M, Baglioni P, Vago J (2005) Development of the ESA ExoMars rover. In: Proceedings of the 8th International Symposium on Artifical Intelligence, Robotics and Automation in Space (i-SAIRAS 2005). ESA Special Publications, vol SP-603. ESA Publications Division, Nordwijk
Venugopal I, Muthukkumaran K, Annadurai M, Prabu T, Anbazhagan S (2020) Study on geomechanical properties of lunar soil simulant (LSS-ISAC-1) for Chandrayaan mission. Adv Space Res 66(11):2711–2721. https://doi.org/10.1016/j.asr.2020.08.021
Willman BM, Boles WW (1995) Soil-tool interaction theories as they apply to lunar soil simulant. J Aerosp Eng 8(2):88–99. https://doi.org/10.1061/(ASCE)0893-1321(1995)8:2(88)
Wirtz M, Hildebrandt M (2016) IceShuttle Teredo: an Ice-Penetrating Robotic System to Transport an Exploration AUV into the Ocean of Jupiter’s Moon Europa. In: 67th International Astronautical Congress (IAC 2016). IAF, pp IAC-16-A3.5.2
Witze A (2023) Companies are flocking to the moon—what does that mean for science? Nature 616. https://doi.org/10.1038/d41586-023-01045-6
Xiao L, Qian Y, Wang Q, Wang Q (2021) The Chang’e-5 mission. In: Sample return missions. Elsevier, Amsterdam, pp 195–206
Xue L (2017) Engineering of Martian Soil Simulant and in Site Identification of Terrain Parameter for Planetary Rovers
Yao Z, Chao C, Guo H, Zhang T, Xu K, Ding X, Zhao Z, Pang Y, Deng J, Guan Y (2021) Progress and perspective of Martian regolith-sampling technology. Chin J Mech Eng 57(13):83–101. https://doi.org/10.3901/JME.2021.13.083
Yoshikawa M, Kawaguchi J, Fujiwara A, Tsuchiyama A (2021) The Hayabusa mission. In: Longobardo A (ed) Sample return missions: the last frontier of solar system exploration. Elsevier, Amsterdam, pp 123–146. https://doi.org/10.1016/B978-0-12-818330-4.00006-9
Zacny K, Bar-Cohen Y, Brennan M, Briggs G, Cooper G, Davis K, Dolgin B, Glaser D, Glass B, Gorevan S, Guerrero J, McKay C, Paulsen G, Stanley S, Stoker C (2008a) Drilling systems for extraterrestrial subsurface exploration. Astrobiology 8(3):665–706. https://doi.org/10.1089/ast.2007.0179
Zacny K, Paulsen G, Davis K, Mumm E, Gorevan S (2008b) Honeybee robotics planetary drill systems. In: 39th Annual Lunar and Planetary Science Conference, p 1355
Zacny K, Chu P, Paulsen G, Avanesyan A, Craft J, Osborne L (2012) Mobile in-situ water extractor (MISWE) for Mars, moon, and asteroids in situ resource utilization. In: AIAA SPACE 2012 conference & exposition. American Institute of Aeronautics and Astronautics, Pasadena
Zacny K, Chu P, Paulsen G, Hedlund M, Mellerowicz B, Indyk S, Spring J, Parness A, Wegel D, Mueller R, Levitt D (2013a) Asteroids: anchoring and sample acquisition approaches in support of science, exploration, and in situ resource utilization. In: Badescu V (ed) Asteroids: prospective energy and material resources. Springer, Berlin, pp 287–343. https://doi.org/10.1007/978-3-642-39244-3_12
Zacny K, Paulsen G, Chu P, Hedlund M, Spring J, Osborne L, Matthews J, Zarzhitsky D, Nesnas IA, Szwarc T, Indyk S (2013b) Axel rover NanoDrill and PowderDrill: acquisition of cores, regolith and powder from steep walls. In: 2013 IEEE Aerospace Conference, pp 1–11
Zacny K, Paulsen G, McKay CP, Glass B, Davé A, Davila AF, Marinova M, Mellerowicz B, Heldmann J, Stoker C, Cabrol N, Hedlund M, Craft J (2013c) Reaching 1 m deep on Mars: the icebreaker drill. Astrobiology 13(12):1166–1198. https://doi.org/10.1089/ast.2013.1038
Zacny K, Paulsen G, Szczesiak M, Craft J, Chu P, McKay C, Glass B, Davila A, Marinova M, Pollard W, Jackson W (2013d) LunarVader: development and testing of lunar drill in vacuum chamber and in lunar analog site of Antarctica. J Aerosp Eng 26(1):74–86. https://doi.org/10.1061/(ASCE)AS.1943-5525.0000212
Zacny K, Chu P, Davis K, Paulsen G, Craft J (2014a) Mars2020 sample acquisition and caching technologies and architectures. In: 2014 IEEE Aerospace Conference. IEEE pp 1–12
Zacny K, Mueller RP, Ebert T, Dupuis M, Mumm E, Neal D, Spring J, Paulsen G, Chu P, Mellerowicz B (2014b) MicroDrill sample acquisition system for small class exploration spacecrafts. In: Earth and space 2014, pp 256–265
Zacny K, Paulsen G, Kleinhenz J, Mellerowicz B, Chu P, Kim D, Follet C (2014c) Development and testing of a lunar prospecting drill (LPD) to search for water-ice. In: Earth and space 2014, pp 200–209
Zacny K, Chu P, Spring J, Ford S, Paulsen G (2015a) Pyramid Comet Sampler (PyCoS). In: AIAA SPACE 2015 conference and exposition. American Institute of Aeronautics and Astronautics, Pasadena
Zacny K, Paulsen G, Kleinhenz J, Mellerowicz B, Chu P, Kim D, Follet C (2015b) Development and testing of a lunar prospecting drill (LPD) to search for water-ice. In: Earth and space 2014. American Society of Civil Engineers, pp 200–209
Zacny K, Shara M, Paulsen G, Mellerowicz B, Spring J, Ridilla A, Nguyen H, Ridilla K, Hedlund M, Sharpe R (2016) Development of a planetary deep drill. In: Earth and space 2016: engineering for extreme environments. American Society of Civil Engineers, Reston, pp 256–266
Zacny K, Rehnmark F, Hall J, Cloninger E, Hyman C, Kriechbaum K, Melko J, Rabinovitch J, Wilcox B, Lambert J, Mumm E, Paulsen G, Vendiola V, Chow K, Traeden N (2017) Development of Venus drill. In: 2017 IEEE Aerospace Conference, pp 1–19
Zacny K, Mueller J, Costa T, Cwik T, Gray A, Zimmerman W, Chow P, Rehnmark F, Adams G (2018) SLUSH: Europa hybrid deep drill. In: 2018 IEEE Aerospace Conference, pp 1–14
Zacny K, Hand KP, Sotin C, Howell SM, Cwik TA, Mueller J, Ehlmann BL, Nagihara S, Tipton M, Liller S, Rehnmark F, Costa JT, Bergman D, Hovik W (2019). SLUSH: Search for Life Using Submersible Heated drill. In: 2019 Astrobiology Conference. AGU, pp 402-1
Zacny K, Ehlmann BL, House CH (2020a) FROST: Frozen Regolith Observation and Sampling Tool AGU Fall Meeting Abstracts pp P089–02
Zacny K, Rehnmark F, Yen B, Paulsen G, Yu D, Bailey J, Sparta J, Indyk S, Lorenz R, Turle E (2020b) Drill for acquisition of complex organics (DrACO) for dragonfly, a New Frontiers Mission to explore Titan. In: 51st Annual Lunar and Planetary Science Conference. p 1763
Zacny K, Vendiola V, Morrision P, Paz A (2021) Planetary volatiles extractor (PVEx) for prospecting and in situ resource utilization. In: Earth and space 2021, pp 713–723
Zacny K, Hall JL, Bailey J, Yen B, Rehnmark F, Cloninger E, Moreland J, Sherrill K, Melko J, Nakley LM, Tims J, Zheng R (2022a) Venus high temperature motor and rotary percussive drill for pneumatic acquisition of samples. In: 2022 IEEE Aerospace Conference (AERO), pp 1–13
Zacny K, Paulsen G, Margulieux R, Thomas L, Spring J, Wei R, Adams G, Yu D, Bailey J, Ng P, Lorenz R, Turtle E, Wegel D, Trainer M, Krimchansky S, Hames A (2022b) Drill for Acquisition of Complex Organics (DrACO) for Dragonfly Mission. 2678:1069
Zacny K, Chu P, Vendiola V, Creekmore P, Ng P, Goldman S, Seto E, Bywaters K, Bailey E, Zheng R, Ware L, Rashedi A, Beard P, Chow P, Dearing S, Grossman A, Huddleston R, Humphrey K, Jain A, Lakomski D, Mank Z, Paulsen G, Martinez S, O’Bannon T, Parekh A, Shasho J, Wang A, Wilson J, Xu H, Quinn J, Eichenbaum A, Captain J, Kleinhenz J (2023) TRIDENT Drill for VIPER and PRIME-1 Missions to the Moon.: 465–474 https://doi.org/10.1061/9780784484470.043
Zeng X, He C, Wilkinson A (2010) Geotechnical properties of NT-LHT-2M lunar highland simulant. J Aerosp Eng 23(4):213–218. https://doi.org/10.1061/(ASCE)AS.1943-5525.0000026
Zeng X, Li X, Wang S, Li S, Spring N, Tang H, Li Y, Feng J (2015) JMSS-1: a new Martian soil simulant. Earth Planets Space 67:72. https://doi.org/10.1186/s40623-015-0248-5
Zhang W (2014) Research on penetrating characteristics of a creepy-boring penetrator. Dissertation, Harbin Institute of Technology
Zhang T, Xu K, Yao Z, Ding X, Zhao Z, Hou X, Pang Y, Lai X, Zhang W, Liu S, Deng J (2019) The progress of extraterrestrial regolith-sampling robots. Nat Astron 3(6):487–497. https://doi.org/10.1038/s41550-019-0804-1
Zhang T, Wang B, Wei H, Zhang Y, Chao C, Xu K, Ding X, Hou X, Zhao Z (2021) Review on planetary regolith-sampling technology. Prog Aerosp Sci 127:100760. https://doi.org/10.1016/j.paerosci.2021.100760
Zhang Y, Zhang T, Wei H, Liu J, Wang W, Yuan X, Pang Y, Guan Y, Hou X, Xu K (2022b) Advances in extraterrestrial drilling technology to discover the secrets hidden inside celestial bodies. Space Sci Rev 218(6). https://doi.org/10.1007/s11214-022-00915-1
Zhang X, Zhang G, Xie H, Gao M, Wen Y (2022a) A review of sampling exploration and devices for extraterrestrial celestial bodies. Space Sci Rev 218(8):59. https://doi.org/10.1007/s11214-022-00926-y
Zhao Z, Chen T, Pang Y (2019) Optimum parameter matching obtained by experiments for coring drilling into lunar simulant. Adv Space Res 63(7):2239–2244. https://doi.org/10.1016/j.asr.2018.12.025
Zheng Y, Wang S, Ouyang Z, Zou Y, Liu J, Li C, Li X, Feng J (2009) CAS-1 lunar soil simulant. Adv Space Res 43(3):448–454. https://doi.org/10.1016/j.asr.2008.07.006
Zheng Y, Yang M, Deng X, Jin S, Peng J, Su Y, Gu Z, Chen L, Pang Y, Zhang N (2022) Analysis of Chang’e-5 lunar core drilling process. Chin J Aeronaut. https://doi.org/10.1016/j.cja.2022.01.023
Acknowledgements
The work described in this paper was supported by the National Natural Science Foundation of China (Grant No. U2013603, 51827901, 52275454) and the Shenzhen Natural Science Foundation (Grant No. JCYJ20220531103614032, JCYJ20220818102409021).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing Interests
No conflict of interest exists in this submitted manuscript, and the manuscript is approved by all authors for publication. I would like to declare on behalf of my co-authors that the work described was original that has not been published previously, and not under consideration for publication elsewhere, in whole or in part.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Wang, Y., Wang, J., Zhang, G. et al. Advances in Drill-Based Sampling Technology for Extraterrestrial Bodies. Space Sci Rev 220, 66 (2024). https://doi.org/10.1007/s11214-024-01100-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11214-024-01100-2