
Abstract
In this paper, the (2 + 1)-dimensional variable coefficients equation which describes the thermophoric wave motion of wrinkles in graphene sheets (2D-vGS) is studied, where it has many applications in 2D optics, nanophotonic, and nanoelectronics. A direct simplified Hirota’s bilinear method is generalized to find the bilinear form of the 2D-vGS equation. Accordingly, one, two, and three soliton wave solutions indicate that our studied equation is fully integrable and has n-soliton solutions. Moreover, we have focused on the study of two and three solitons interactions, this leads to the identification of two distinct solution types, the Y-shape soliton and fork- shape soliton, which can be clearly distinguished from the 3D plots and density plots. These solutions are characterized by a rich spectrum of collision dynamics and encompassing phenomena such as fusion and fission. The nonlinear properties of the two and three soliton solutions could be useful for farther applications in 2D optics like metamaterials with exotic optical properties and ultra-compact and efficient photonic devices.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Graphene is a material made of pure carbon and created from graphite. It is a 2D material with fascinating electrical, thermal, mechanical, chemical, and optical properties, so it is called “material of the future”. As a 2D material in optics, graphene shows many extraordinary properties such as a broadband ultrafast optical response, strong material anisotropy and large optical nonlinearities. These have empowered a lot of new photonic devices that are basically different from those based on traditional bulk materials. Therefore, it has a wide range of uses in manufacture of smartphones, batteries, electronic circuits to the construction of solar panels (Cui et al. 2021; Fan et al. 2019; Grigorenko et al. 2012; Wu et al. 2021).
Thermophoretic motion is the movement of microscopic particles due to a temperature gradient. In the context of graphene, thermophoretic motion refers to the movement of graphene sheets or particles adsorbed on graphene due to a temperature gradient (Luo et al. 2023; Usman et al. 2023).
There are two main mechanisms of thermophoretic motion in graphene. The first is the Conventional thermophoresis which based on the interaction between the graphene and the surrounding fluid molecules. When there is a temperature gradient, the fluid molecules near the hot side move faster than those near the cold side. This difference in velocity creates a drag force on the graphene, which causes it to move towards the cold side(Ramachandran et al. 2020). Where the second type is the ballistic thermophoresis which is specific to graphene and other two-dimensional (2D) materials. It is caused by the ballistic transport of heat through the graphene sheet. Ballistic heat transport refers to the propagation of heat waves without collisions. In graphene, heat waves are carried by flexural phonons, which are vibrations of the graphene sheet. When a flexural phonon scatters off an adsorbed particle, it can transfer momentum to the particle, causing it to move (Bae et al. 2013; Han et al. 2016).
Solitons are localized wave packets that can propagate through a medium without losing their shape. They can be found in various systems, including graphene wrinkles. So it was found that the KdV-type equations can be adapted to model the thermophoretic motion of single wrinkles (Guo and Guo 2012). Recently, Abdel-Gawad et al. (2021) have driven a new (2 + 1)-dimensional nonlinear equation using the kp operator on the KdV model which could be used to describe the thermophoretic motion in graphene sheets (GS) as a 2D material
where \(v=v(t,x,y)\) is the thermophoretic moving variable and t, x,y are time, longitudinal displacement, lateral displacement respectively with \( a\left( t\right) ,b\) as the thermal conductivity coefficients where \(\delta \left( t\right) \) is the coefficient of the lateral dispersion. When \(\delta \left( t\right) =0\), Eq. (1) reduces to the one dimensional thermophoretic equation with a variable heat transmission which was solved by many authors (Gaballah and El-Shiekh 2024; Guo and Guo 2012; Javid et al. 2019) where different structure of wave solutions like lump and solitary waves were found. Equation (1) is called the variable coefficients (2 + 1)-dimensional graphene sheets (2D-vGS) equation and it used to describe the thermophoretic waves transmission in (2 + 1)-dimentional graphene sheets, as wrinkles in graphene when heated, the hotter regions of the wrinkle experience a force pushing them towards the colder regions, causing the wrinkle move. However, in graphene, this motion occurs within the solid material itself, not in a surrounding fluid. Equation (1) was solved by the extended unified method and many types of polynomial and rational solutions were obtained (Abdel-Gawad et al. 2021).
From the previous background about thermophoretic motion in graphene and with Eq. (1) which can be considered as a model to describe that motion with a wide range of possible applications in nanodevices, purifying water, developing new lab-on-a-chip devices and studying the behavior of biological systems. Therefore, we have decided to study the 2D-vGS Eq. (1) to find new n-soliton wave solutions for it using the direct bilinear method.
This paper contains five sections, the first one is the introduction which reflects the importance of the 2D-vGS equation, and the second section gives a brief description for the direct technique presented by Hereman and Nuseir (1997) to find both the Hirota bilinear form and n-soliton wave solutions for nonlinear partial differential equations (Hereman and Nuseir 1997; Wazwaz 2007). Where in the third section, we have generalized the direct bilinear method by using suitable variable coefficient transformation to find the bilinear form of the 2D-vGS equation and the n-soliton wave solutions of that equation. In section four, a discussion of the two and three solitons behavior affected with different choices of the thermal conductivity is given with the physical importance of the obtained solutions in the 2D optics and the dynamic interactions. Finally, the fifth section contains the important conclusion remarks obtained from our study with future possible applications.
2 Simplified direct Hirota’s method
Recently, many different new techniques were developed and investigated to solve variable coefficients nonlinear partial differential equations like B äcklund transformation, Lie group analysis, symmetry techniques, Jacobi expansion method, trial equation method...etc (Abdel-Gawad and Osman 2013; Baskonus et al. 2021; Boakye et al. 2024; El-Shiekh et al. 2022; El-Shiekh 2021; El-Shiekh and Al-Nowehy 2022; El-Shiekh and Gaballah 2020a, b, 2021a, b, c, 2022, 2023a, b, 2024; El-Shiekh and Hamdy 2023; Fahim et al. 2022; Gaballah et al. 2023, 2022; Gaballah and El-Shiekh 2023; Ganie et al. 2024; Khater 2022a, b, c, d, e, f, 2023a, b, c, d, e, f, g, h, i, j, k, l, m; Kumar et al. 2020; Osman et al. 2018; Rehman et al. 2024; Tarla et al. 2022; Tarla et al. 2022). Hirota bilinear method still considered as the most attractive method for finding soliton wave solutions (Fan and Bao 2024; Yuan and Ghanbari 2024).
Since Hirota’s bilinear method is so complicated with higher order nonlinear partial differential equations. In Hereman and Nuseir (1997) presented a simple and direct algorithm of the Hirota’s method as follows:
For a nonlinear partial differential equation
assume that v takes a solution in the form
where R is a constant can be determined by finishing the linear and nonlinear terms and k is a positive integer can be found from the balance procedure between linear and nonlinear coefficients in Eq. (2). \(\hbar =\hbar \left( x,y,t\right) \) arbitrary function. After find the form of the solution (3), we can use the Hirota bilinear differential operator
where f and g two differentiable functions. Than we can rewrite Eq. (2) in the bilinear form but not all integrable equations can be written in this form, so Hereman and Nuseir find another way to rewrite Eq. (2) after substituting with Eq. (3) as a combination of both linear \( \mathcal {L}\) and nonlinear N terms in \(\hbar \)
Then to fined soliton wave solution assume that
where \(\varepsilon \) is not a small parameter it is a book-keeping parameter. Substitute from Eq. (6) into Eq. (5) and equate the coefficients of \(\varepsilon \) to zero, we get:
For the one soliton solution
and for the two solitons
and so on.
3 N-soliton for the 2D-vGS equation
In order to find the Hirota’s bilinear form of the 2D-vGS equation, we use assumption (3) with the balance technique between the terms \(\left( vv_{x}\right) _{x}\) and \(v_{xxxx}.\) Therefore, \(k=2\) and \(R=12.\) So, Eq. (3) can be rewritten as:
Now, substitute from Eq. (13) into Eq. (1):
By integration twice for Eq. (14) with respect to x we get:
where
Substitute from Eq. (16) in Eq. (15), yields
From the Hirota’s D-operator defined by Eq. (4), we get
So, Eq. (17) has the following bilinear form
Also, Eq. (17) is equivalent to
Comparing Eq. (20) with Eq. (7), the linear operator \(\pounds \) and the nonlinear operator N can be defined as:
The n-soliton solutions can be considered in the form
where \(\theta _{i}=k_{i}x+l_{i}y-\lambda _{i}\left( t\right) -m_{i}t,\) \( k_{i},l_{i},m_{i}\) are arbitrary constants this suggestion of the \(\theta _{i}\) is used to make us able to find n-solitons for variable coefficient equations, where i is an integer number and \(\lambda _{i}\left( t\right) \) are arbitrary functions of t. By substitution in (20), we get the following dispersion relation
Therefore,
where c is an integration constant. Now, the one soliton solution when \( N=1 \) and \(\varepsilon =1\) from Eqs. (11) and (13) is
which is equivalent to
For two solitons assume that \(N=2\) and \(\varepsilon =1\), then \(\hbar ^{\left( 1\right) }=e^{\theta _{1}}+e^{\theta _{2}},\) and \(\hbar =1+e^{\theta _{1}}+e^{\theta _{2}}+\hbar ^{(2)}\left( x,y,t\right) \) by back substitution in (8), we get \(\hbar ^{(2)}=e^{\theta _{1}+\theta _{2}+\alpha _{12}}\) and \(e^{\alpha _{12}}=\frac{\left( k_{1}-k_{2}\right) ^{2}}{\left( k_{1}+k_{2}\right) ^{2}}\) with condition that \(l_{1}=k_{1},l_{2}=k_{2}\), hence the two soliton solution for the 2D-vGS equation is given by
where
Accordingly, to find the 3-soliton wave solution we consider \(N=3\) in Eq. (23), \(\hbar ^{\left( 1\right) }=e^{\theta _{1}}+e^{\theta _{2}}+e^{\theta _{3}},\) and \(\hbar ^{(2)}=e^{(\theta _{1}+\theta _{2})+\alpha _{12}}+e^{(\theta _{1}+\theta _{3})+\alpha _{13}}+e^{(\theta _{2}+\theta _{3})+\alpha _{23}}+\hbar ^{(3)}\left( x,y,t\right) \), then we get \(\hbar ^{(3)}=e^{(\theta _{1}+\theta _{2}+\theta _{3})+\alpha _{123}},e^{\alpha _{ij}}=\frac{\left( k_{i}-k_{j}\right) ^{2}}{\left( k_{i}+k_{j}\right) ^{2}}\) where \(e^{\alpha _{123}}=\frac{(k_{1}-k_{2})^{2} \left( k_{1}-k_{3}\right) ^{2}\left( k_{2}-k_{3}\right) ^{2}}{\left( k_{1}+k_{2}\right) ^{2}\left( k_{1}+k_{2}\right) ^{2}\left( k_{1}+k_{3}\right) ^{2}}.\)Therefore, the 2D-vGS equation has the following three soliton solution
In the same way we can determine the soliton solutions for \(n\succeq 4.\) So this emphasis that the 2D-vGS equation is completely integrable and have any n soliton solutions.
4 Application in 2D optics
Graphene, a single layer of carbon atoms arranged in a honeycomb lattice, holds immense potential in the field of 2D optics and thermophonic due to its unique electronic and thermal properties. In this paper, we have found n-soliton wave solutions for the variable coefficient’s Eq. (1) which describes the thermophoretic motion of single wrinkles in graphene sheets which consider as an intriguing area of research with potential applications in manipulating light at the nanoscale in 2D optics. Wrinkles can modify the optical properties of graphene where their presence can affect how light interacts with the material also wrinkles can influence the propagation and localization of surface plasmons, which are collective oscillations of electrons on the graphene surface. Plasmons play a crucial role in various 2D photonic devices (Deng and Berry 2016; Ogawa et al. 2020).
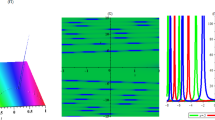
From the previous description of the importance of the studied equation and its possible applications in 2D optics we are interested in this section to focus on the interactions of solitary waves specially on the second and third order solitons because those solutions are characterized by a rich spectrum of collision dynamics encompassing phenomena such as fusion and fission (Yuan and Ghanbari 2024). Moreover, the one soliton solution which was investigated before (Abdel-Gawad et al. 2021), we have plotted 3D plots and density plots corresponding to three different choices for the variable coefficients a(t) and \(\delta (t)\) as constant functions \(a(t)=\delta (t)=1 \) in figures (a), linear function of t like \(a(t)=\delta (t)=t\) in figures (b) and periodic function \(a(t)=\delta (t)=\sin (0.5t)\) in figures (c) as follows (Figs. 1, 2, 3, 4).

The 3D plot of the two soliton solution \(v_{2}\) given by Eq. (28) where parameters are taken as: \(k_{1}=2,k_{2}=b=c=1,y=0\)

The density plot corresponding to the two soliton solution \(v_{2}\) for the three cases plotted in Fig. 3. The two solitons are taken the Y-shape soliton in (a) it is like a lines but in (b) and (c) take a curve shape in the second branch of the Y-shape affected with values of the variable coefficients

The 3D plot of the three solitons solution \(v_{3}\) given by Eq. (30) where parameters are taken as: \( k_{1}=1,k_{2}=2,k_{3}=3,b=c_{1}=c_{2}=1,y=0\)


The three soliton solution taken Y-shape when we assumes \( k_{1}=k_{2}=1,k_{3}=2\) with \(b=c_{1}=c_{2}=1,y=0\)

The density plot of the three soliton solution when \( k_{1}=k_{2}=1,k_{3}=2\) with \(b=c_{1}=c_{2}=1,y=0\), the Y-shape is so clear
From the previous figures, we see that the two soliton waves make a Y-shape and the three soliton waves show a fork-shape when \(k_{1},k_{2},k_{3}\) take different values but it return to the Y-shape if any two k’s become equal and this means that one of the \(e^{\alpha _{ij}}=\frac{\left( k_{i}-k_{j}\right) ^{2}}{\left( k_{i}+k_{j}\right) ^{2}}=0\), and to prove this we have chosen \(k_{1}=k_{2}=0,e^{\alpha _{i2}}=0\) and plotted it in Figs. 5 and 6. The dynamic behavior and the nonlinearity properties of the obtained two and three solutions of the 2D-vGS equation could be important in 2D optic like modulation of light, surface plasmon resonance and thermal imaging.
5 Conclusion
The (2 + 1)-dimensional graphene sheets equation is a significant nonlinear model of 2D optics that broad relevance across various domains in science and engineering. In this study, we have generalized the direct Hirota bilinear method given by Hereman and Nuseir (1997), Wazwaz (2007) to find the bilinear form of the 2D-vGS model which describes the thermophoric wave motion of wrinkles in graphene sheets. According to that, one, two and three soliton solutions were obtained which yielded the n-soliton solutions for the 2D-vGS. So, we can concluded that this equation is fully integrable. In the following some important concluding remarks about the results obtained in this study:
-
1.
The obtained soliton solutions specially the two and three solitons are new and didn’t obtained before for the 2D-vGS equation (Abdel-Gawad et al. 2021).
-
2.
The fascinating dynamic behavior of the two solitons and three solitons as Y-shape and fork-shape solitons which could shed light on the fission and fusion dynamics of these solitary waves is illustrated.
-
3.
The three solitons can give both fork shape solitary wave if the \( k^{\prime }s\) have different values but it returns to Y-shape if any two \( k^{\prime }s\) are equals.
-
4.
From the 3D plots and density plots we can see the effect of both variable heat transmission function a(t) and the coefficient of the lateral dispersion \(\delta \left( t\right) \) on the propagation of the two and three solitons propagation.
Finally, we hope our work would have an impact in the manufacturer applications of the graphene sheets as a 2D material with fascinating properties specially in 2D optics.
Availability of data and materials
There is no data set need to be accessed.
References
Abdel-Gawad, H.I., Osman, M.S.: On the variational approach for analyzing the stability of solutions of evolution equations. Kyungpook Math. J. 53, 661–680 (2013). https://doi.org/10.5666/KMJ.2013.53.4.680
Abdel-Gawad, H.I., Abdel-Rashied, H.M., Tantawy, M., Ibrahim, G.H.: Multi-geometric structures of thermophoretic waves transmission in (2 + 1) dimensional graphene sheets. Stability analysis. Int. Commun. Heat Mass Transf. 126, 105406 (2021). https://doi.org/10.1016/J.ICHEATMASSTRANSFER.2021.105406
Bae, M.H., Li, Z., Aksamija, Z., Martin, P.N., Xiong, F., Ong, Z.Y., Knezevic, I., Pop, E.: Ballistic to diffusive crossover of heat flow in graphene ribbons. Nat. Commun. 41(4), 1–7 (2013). https://doi.org/10.1038/ncomms2755
Baskonus, H.M., Osman, M.S., Rehman, H.U., Ramzan, M., Tahir, M., Ashraf, S.: On pulse propagation of soliton wave solutions related to the perturbed Chen–Lee–Liu equation in an optical fiber. Opt. Quantum Electron. 53, 1–17 (2021). https://doi.org/10.1007/S11082-021-03190-6/FIGURES/8
Boakye, G., Hosseini, K., Hinçal, E., Sirisubtawee, S., Osman, M.S.: Some models of solitary wave propagation in optical fibers involving Kerr and parabolic laws. Opt. Quantum Electron. 56, 1–11 (2024). https://doi.org/10.1007/S11082-023-05903-5/METRICS
Cui, L., Wang, J., Sun, M.: Graphene plasmon for optoelectronics. Rev. Phys. 6, 100054 (2021). https://doi.org/10.1016/J.REVIP.2021.100054
Deng, S., Berry, V.: Wrinkled, rippled and crumpled graphene: an overview of formation mechanism, electronic properties, and applications. Mater. Today 19, 197–212 (2016). https://doi.org/10.1016/J.MATTOD.2015.10.002
El-Shiekh, R.M.: Novel solitary and shock wave solutions for the generalized variable-coefficients (2+1)-dimensional KP-Burger equation arising in dusty plasma. Chin. J. Phys. 71, 341–350 (2021). https://doi.org/10.1016/J.CJPH.2021.03.006
El-Shiekh, R.M., Al-Nowehy, A.G.A.A.H.: Symmetries, reductions and different types of travelling wave solutions for symmetric coupled Burgers equations. Int. J. Appl. Comput. Math. 84(8), 1–13 (2022). https://doi.org/10.1007/S40819-022-01385-3
El-Shiekh, R.M., Gaballah, M.: Bright and dark optical solitons for the generalized variable coefficients nonlinear Schrödinger equation. Int. J. Nonlinear Sci. Numer. Simul. (2020a). https://doi.org/10.1515/ijnsns-2019-0054
El-Shiekh, R.M., Gaballah, M.: Solitary wave solutions for the variable-coefficient coupled nonlinear Schrödinger equations and Davey–Stewartson system using modified sine-Gordon equation method. J. Ocean Eng. Sci. (2020b). https://doi.org/10.1016/j.joes.2019.10.003
El-Shiekh, R.M., Gaballah, M.: Novel solitons and periodic wave solutions for Davey–Stewartson system with variable coefficients. J. Taibah Univ. Sci. 14, 783–789 (2020c). https://doi.org/10.1080/16583655.2020.1774975
El-Shiekh, R.M., Gaballah, M.: New rogon waves for the nonautonomous variable coefficients Schrödinger equation. Opt. Quantum Electron. 53, 1–12 (2021a). https://doi.org/10.1007/S11082-021-03066-9/FIGURES/3
El-Shiekh, R.M., Gaballah, M.: New analytical solitary and periodic wave solutions for generalized variable-coefficients modified KdV equation with external-force term presenting atmospheric blocking in oceans. J. Ocean Eng. Sci. (2021b). https://doi.org/10.1016/J.JOES.2021.09.003
El-Shiekh, R.M., Gaballah, M.: Integrability, similarity reductions and solutions for a (3 + 1)-dimensional modified Kadomtsev–Petviashvili system with variable coefficients. Partial Differ. Equ. Appl. Math. 6, 100408 (2022). https://doi.org/10.1016/J.PADIFF.2022.100408
El-Shiekh, R.M., Gaballah, M.: Lie group analysis and novel solutions for the generalized variable-coefficients Sawada–Kotera equation. Europhys. Lett. (2023a). https://doi.org/10.1209/0295-5075/ACB460
El-Shiekh, R.M., Gaballah, M.: Novel solitary and periodic waves for the extended cubic (3 + 1)-dimensional Schrödinger equation. Opt. Quantum Electron. 55, 1–12 (2023b). https://doi.org/10.1007/S11082-023-04965-9/METRICS
El-Shiekh, R.M., Gaballah, M.: Novel optical waves for the perturbed nonlinear Chen–Lee–Liu equation with variable coefficients using two different similarity techniques. Alex. Eng. J. 86, 548–555 (2024). https://doi.org/10.1016/J.AEJ.2023.12.003
El-Shiekh, R.M., Hamdy, H.: Novel distinct types of optical solitons for the coupled Fokas–Lenells equations. Opt. Quantum Electron. 55, 1–11 (2023). https://doi.org/10.1007/S11082-023-04546-W/METRICS
El-Shiekh, R.M., Gaballah, M., Elelamy, A.F.: Similarity reductions and wave solutions for the 3D-Kudryashov–Sinelshchikov equation with variable-coefficients in gas bubbles for a liquid. Results Phys. 40, 105782 (2022). https://doi.org/10.1016/J.RINP.2022.105782
Fahim, M.R.A., Kundu, P.R., Islam, M.E., Akbar, M.A., Osman, M.S.: Wave profile analysis of a couple of (3 + 1)-dimensional nonlinear evolution equations by sine-Gordon expansion approach. J. Ocean Eng. Sci. 7, 272–279 (2022). https://doi.org/10.1016/J.JOES.2021.08.009
Fan, L., Bao, T.: Bell polynomials and superposition wave solutions of Hirota–Satsuma coupled KdV equations. Wave Motion 126, 103271 (2024). https://doi.org/10.1016/J.WAVEMOTI.2024.103271
Fan, Y., Shen, N.H., Zhang, F., Zhao, Q., Wu, H., Fu, Q., Wei, Z., Li, H., Soukoulis, C.M.: Graphene plasmonics: a platform for 2D optics. Adv. Opt. Mater. 7, 1800537 (2019). https://doi.org/10.1002/ADOM.201800537
Gaballah, M., El-Shiekh, R.M.: Similarity reduction and multiple novel travelling and solitary wave solutions for the two-dimensional Bogoyavlensky–Konopelchenko equation with variable coefficients. J. Taibah Univ. Sci. 17, 2192280 (2023). https://doi.org/10.1080/16583655.2023.2192280
Gaballah, M., El-Shiekh, R.M.: Symmetry transformations and novel solutions for the graphene thermophoretic motion equation with variable heat transmission using Lie group analysis. Europhys. Lett. (2024). https://doi.org/10.1209/0295-5075/AD19E5
Gaballah, M., El-Shiekh, R.M., Akinyemi, L., Rezazadeh, H.: Novel periodic and optical soliton solutions for Davey–Stewartson system by generalized Jacobi elliptic expansion method. Int. J. Nonlinear Sci. Numer. Simul. (2022). https://doi.org/10.1515/ijnsns-2021-0349
Gaballah, M., El-Shiekh, R.M., Hamdy, H.: Generalized periodic and soliton optical ultrashort pulses for perturbed Fokas–Lenells equation. Opt. Quantum Electron. 55, 1–12 (2023). https://doi.org/10.1007/S11082-023-04644-9/METRICS
Ganie, A.H., Sadek, L.H., Tharwat, M.M., Iqbal, M.A., Miah, M.M., Rasid, M.M., Elazab, N.S., Osman, M.S.: New investigation of the analytical behaviors for some nonlinear PDEs in mathematical physics and modern engineering. Partial Differ. Equ. Appl. Math. 9, 100608 (2024). https://doi.org/10.1016/J.PADIFF.2023.100608
Grigorenko, A.N., Polini, M., Novoselov, K.S.: Graphene plasmonics. Nat. Photonics 611(6), 749–758 (2012). https://doi.org/10.1038/nphoton.2012.262
Guo, Y., Guo, W.: Soliton-like thermophoresis of graphene wrinkles. Nanoscale 5, 318–323 (2012). https://doi.org/10.1039/C2NR32580B
Han, H., Zhang, Y., Wang, N., Samani, M.K., Ni, Y., Mijbil, Z.Y., Edwards, M., Xiong, S., Sääskilahti, K., Murugesan, M., Fu, Y., Ye, L., Sadeghi, H., Bailey, S., Kosevich, Y.A., Lambert, C.J., Liu, J., Volz, S.: Functionalization mediates heat transport in graphene nanoflakes. Nat. Commun. 71(7), 1–9 (2016). https://doi.org/10.1038/ncomms11281
Hereman, W., Nuseir, A.: Symbolic methods to construct exact solutions of nonlinear partial differential equations. Math. Comput. Simul. 43, 13–27 (1997). https://doi.org/10.1016/S0378-4754(96)00053-5
Javid, A., Raza, N., Osman, M.S.: Multi-solitons of thermophoretic motion equation depicting the wrinkle propagation in substrate-supported graphene sheets. Commun. Theor. Phys. 71, 362 (2019). https://doi.org/10.1088/0253-6102/71/4/362
Khater, M.M.A.: Nonlinear elastic circular rod with lateral inertia and finite radius: dynamical attributive of longitudinal oscillation. Int. J. Mod. Phys. B (2022a). https://doi.org/10.1142/S0217979223500522
Khater, M.M.A.: In solid physics equations, accurate and novel soliton wave structures for heating a single crystal of sodium fluoride. Int. J. Mod. Phys. B (2022b). https://doi.org/10.1142/S0217979223500686
Khater, M.M.A.: Prorogation of waves in shallow water through unidirectional Dullin–Gottwald–Holm model; computational simulations. Int. J. Mod. Phys. B. (2022c). https://doi.org/10.1142/S0217979223500716
Khater, M.M.A.: Novel computational simulation of the propagation of pulses in optical fibers regarding the dispersion effect. Int. J. Mod. Phys. B. (2022d). https://doi.org/10.1142/S0217979223500832
Khater, M.M.A.: Abundant and accurate computational wave structures of the nonlinear fractional biological population model. Int. J. Mod. Phys. B. (2022e). https://doi.org/10.1142/S021797922350176X
Khater, M.M.A.: Long waves with a small amplitude on the surface of the water behave dynamically in nonlinear lattices on a non-dimensional grid. Int. J. Mod. Phys. B (2022f). https://doi.org/10.1142/S0217979223501886
Khater, M.M.A.: Hybrid accurate simulations for constructing some novel analytical and numerical solutions of three-order GNLS equation. Int. J. Geom. Methods Mod. Phys. (2023a). https://doi.org/10.1142/S0219887823501591
Khater, M.M.A.: Physics of crystal lattices and plasma; analytical and numerical simulations of the Gilson–Pickering equation. Results Phys. 44, 106193 (2023b). https://doi.org/10.1016/J.RINP.2022.106193
Khater, M.M.A.: Multi-vector with nonlocal and non-singular kernel ultrashort optical solitons pulses waves in birefringent fibers. Chaos Solitons Fractals 167, 113098 (2023c). https://doi.org/10.1016/J.CHAOS.2022.113098
Khater, M.M.A.: Computational and numerical wave solutions of the Caudrey–Dodd–Gibbon equation. Heliyon (2023d). https://doi.org/10.1016/j.heliyon.2023.e13511
Khater, M.M.A.: A hybrid analytical and numerical analysis of ultra-short pulse phase shifts. Chaos Solitons Fractals 169, 113232 (2023e). https://doi.org/10.1016/J.CHAOS.2023.113232
Khater, M.M.A.: In surface tension; gravity-capillary, magneto-acoustic, and shallow water waves’ propagation. Eur. Phys. J. Plus 2023(138), 1–14 (2023f). https://doi.org/10.1140/EPJP/S13360-023-03902-9
Khater, M.M.A.: Numerous accurate and stable solitary wave solutions to the generalized modified equal-width equation. Int. J. Theor. Phys. 62, 1–17 (2023g). https://doi.org/10.1007/S10773-023-05362-4/METRICS
Khater, M.M.A.: Advancements in computational techniques for precise solitary wave solutions in the (1 + 1)-dimensional Mikhailov–Novikov–Wang equation. Int. J. Theor. Phys. 62, 1–19 (2023h). https://doi.org/10.1007/S10773-023-05402-Z/METRICS
Khater, M.M.A.: Characterizing shallow water waves in channels with variable width and depth; computational and numerical simulations. Chaos Solitons Fractals 173, 113652 (2023i). https://doi.org/10.1016/J.CHAOS.2023.113652
Khater, M.M.A.: Horizontal stratification of fluids and the behavior of long waves. Eur. Phys. J. Plus 138, 1–11 (2023j). https://doi.org/10.1140/EPJP/S13360-023-04336-Z
Khater, M.M.A.: Soliton propagation under diffusive and nonlinear effects in physical systems; (1 + 1)-dimensional MNW integrable equation. Phys. Lett. A. 480, 128945 (2023k). https://doi.org/10.1016/J.PHYSLETA.2023.128945
Khater, M.M.A.: Computational simulations of propagation of a tsunami wave across the ocean. Chaos Solitons Fractals 174, 113806 (2023l). https://doi.org/10.1016/J.CHAOS.2023.113806
Khater, M.M.A.: Analyzing pulse behavior in optical fiber: novel solitary wave solutions of the perturbed Chen–Lee–Liu equation. Mod. Phys. Lett. (2023m). https://doi.org/10.1142/S0217984923501774
Kumar, D., Park, C., Tamanna, N., Paul, G.C., Osman, M.S.: Dynamics of two-mode Sawada–Kotera equation: mathematical and graphical analysis of its dual-wave solutions. Results Phys. 19, 103581 (2020). https://doi.org/10.1016/J.RINP.2020.103581
Luo, Y., Martin-Jimenez, A., Pisarra, M., Martin, F., Garg, M., Kern, K.: Imaging and controlling coherent phonon wave packets in single graphene nanoribbons. Nat. Commun. 14, 1–9 (2023). https://doi.org/10.1038/s41467-023-39239-1
Ogawa, S., Fukushima, S., Shimatani, M.: Graphene plasmonics in sensor applications: a review. Sensors 20, 3563 (2020). https://doi.org/10.3390/S20123563
Osman, M.S., Machado, J.A.T., Baleanu, D.: On nonautonomous complex wave solutions described by the coupled Schrödinger–Boussinesq equation with variable-coefficients. Opt. Quantum Electron. 50, 1–11 (2018). https://doi.org/10.1007/S11082-018-1346-Y/FIGURES/3
Ramachandran, S., Sobhan, C.B., Peterson, G.P.: Thermophoresis of nanoparticles in liquids. Int. J. Heat Mass Transf. 147, 118925 (2020). https://doi.org/10.1016/J.IJHEATMASSTRANSFER.2019.118925
Rehman, H.U., Said, G.S., Amer, A., Ashraf, H., Tharwat, M.M., Abdel-Aty, M., Elazab, N.S., Osman, M.S.: Unraveling the (4 + 1)-dimensional Davey–Stewartson–Kadomtsev–Petviashvili equation: exploring soliton solutions via multiple techniques. Alex. Eng. J. 90, 17–23 (2024). https://doi.org/10.1016/J.AEJ.2024.01.058
Tarla, S., Ali, K.K., Yilmazer, R., Osman, M.S.: Propagation of solitons for the Hamiltonian amplitude equation via an analytical technique. Mod. Phys. Lett. (2022). https://doi.org/10.1142/S0217984922501202
Usman, M., Hussain, A., Zaman, F.D.: Invariance analysis of thermophoretic motion equation depicting the wrinkle propagation in substrate-supported graphene sheets. Phys. Scr. 98, 095205 (2023). https://doi.org/10.1088/1402-4896/ACEA46
Wazwaz, A.M.: Multiple-soliton solutions for the KP equation by Hirota’s bilinear method and by the tanh–coth method. Appl. Math. Comput. 190, 633–640 (2007). https://doi.org/10.1016/J.AMC.2007.01.056
Wu, J., Jia, L., Zhang, Y., Qu, Y., Jia, B., Moss, D.J.: Graphene oxide for integrated photonics and flat optics. Adv. Mater. 33, 2006415 (2021). https://doi.org/10.1002/ADMA.202006415
Yuan, F., Ghanbari, B.: A study of interaction soliton solutions for the (2 + 1)-dimensional Hirota–Satsuma–Ito equation. Nonlinear Dyn. 112, 2883–2891 (2024). https://doi.org/10.1007/S11071-023-09209-9/METRICS
Acknowledgements
The authors would like to thank the Deanship of Scientific Research, Majmaah University, Saudi Arabia, for funding this work under project Number R-2024-995
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Contributions
Rehab M. Elshiekh wrote and applied different methodologies and Mahmoud Gaballah made physical applications and figures.
Corresponding author
Ethics declarations
Ethical approval
There’s no data need to ethical approval.
Conflict of interest
There is no compact of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
El-Shiekh, R.M., Gaballah, M. Bilinear form and n-soliton thermophoric waves for the variable coefficients (2 + 1)-dimensional graphene sheets equation. Opt Quant Electron 56, 872 (2024). https://doi.org/10.1007/s11082-024-06789-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-024-06789-7